Microprocessor - WordPress.com
advertisement

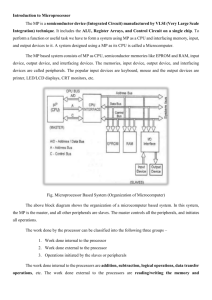
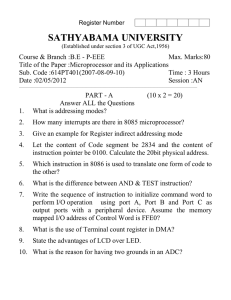
MICROPROCESSOR Microcomputer & Microprocessor A microcomputer is a small computer, making use of microprocessor as the central processing unit (CPU) and usually has a word length of 4, 8, or 16 bits. A microprocessor is a digital electronic component with transistors on a single semiconductor integrated circuit (IC). Microprocessors have replaced conventional digital logic in a wide variety of systems and, therefore, microcomputers are mostly used as component of electronic systems. Microprocessor is processing device of every computing device. It is like an artificial brain. It needs to communicate with outer world. To communicate with external world, Microprocessor make use of buses. A bus is a group of conducting lines that carries data, address and control signals. Examples of devices with microprocessor Digital Watches Personal Computers ATM Home Security & Control devices CD Players Video games Calculators Microprocessor 8085 A common way of categorizing microprocessors is by the number of bits that their ALU can work at a time. Microprocessor 8085 can read or write or perform arithmetic and logical operations on 8-bit data at a time. The 8085 was one of the first (1978) of the 8-bit Microprocessors where all the processing elements for a computer were contained on a single chip. Based on the 8080, the 8085's instruction set was almost identical but the major changes were that the electronics required to design an 8085 system were much simpler (one rather than 3 power supplies and internal clock and bus logic). The 8085 is a typical of that generation of 8-bit Microprocessor which was able to put all the processing unit onto one chip but still requiring surrounding supporting chips to create a complete system. Block Diagram / Architecture of Microprocessor 8085 Block Diagram / Architecture of Microprocessor 8085 1. Bus A bus is a collection of conducting path which is used to transfer signal from one functional unit to another functional unit. The microprocessor 8085 has three types of buses. 1. Address bus 2. Data bus 3. Control bus 2. ALU ALU stands for arithmetic and logical unit. The ALU of microprocessor 8085 is 8-bit microprocessor. The ALU is responsible to perform all arithmetic and logical operation like addition, subtraction, comparison, etc. Block Diagram / Architecture of Microprocessor 8085 3. Registers i. Accumulator: An 8-bit register used in the arithmetic and logical operations. It stores the result of the operation carried out by the ALU. ii. General Purpose Register: B, C, D, E, H and L are 8-bit general purpose registers used to hold data. These registers can also be used for 16-bit operations in pairs. The default pairs are BC, DE and HL. Block Diagram / Architecture of Microprocessor 8085 iii. Stack Pointer (SP): A 16-bit register used to store the 16-bit address of stack memory. It is used as a memory pointer. It points to a memory location in R/W memory called stack. iv. Program Counter (PC): A 16-bit register which holds the address of the next instruction to be executed. Consider that an instruction is being executed by processor. As soon as the ALU finished executing the instruction, the processor looks for the next instruction to be executed. So, there is a necessity for holding the address of the next instruction to be executed in order to save time. This is taken care by the program counter. Microprocessor increments the program whenever an instruction is being executed, so that the program counter points to the memory address of the next instruction that is going to be executed. Block Diagram / Architecture of Microprocessor 8085 v. Instruction Register (IR): It is an 8-bit register used to hold current instruction which the microprocessor is executing. vi. Address Latch: It increments/ decrements the address before sent to the address buffer Block Diagram / Architecture of Microprocessor 8085 vii. Flag Register: An 8-bit register which can store maximum 8-bit data. The flags are mainly associated with arithmetic and logic operations. A flag is actually a latch which can hold some bits of information. It alerts the processor that some event has taken place. There are 5 types of flags: 1. Carry flag 2. Parity flag 3. Auxiliary flag 4. Zero flag 5. Sign flag Flag Registers 1. Sign flag: Sign flag shows whether the output of operation has positive sign or negative sign. A value 0 is returned for positive sign and 1 is returned for negative sign. 2. Parity flag: If the result of the latest operation is having even number of ‘1’s, then this flag will be set. Otherwise this will be reset to ‘0’. This is used for error checking. 3. Auxiliary flag: This flag is not accessible to programmer. This flag will be used by the system during BCD operations. 4. Zero flag: Zero flag shows whether the output of the operation is 0 or not. If the value of Zero flag is 0 then the result of operation is not zero. If it is zero the flag returns value 1. 5. Carry flag: If the result of the latest operations exceeds 8-bits then this flag will be set. Otherwise it be reset. Machine Cycles & Timing of 8085 The timing and control unit generates timing signals for the execution of instruction and control of peripheral devices. Timing Diagram: A graphical representation. It represents the execution time taken by each instruction in a graphical format. The execution time is represented in T-states. Instruction Cycle: The time required to execute an instruction is called an instruction cycle. Machine Cycle: The time required to access the memory or input/output devices is called machine cycle. T-State: The machine cycle and instruction cycle takes multiple clock periods. A portion of an operation carried out in one system clock period is called as T-State. Machine Cycles & Timing of 8085 8085 System Bus A bus is a collection of conducting path which are used to transfer signal from one unit to another. The microprocessor 8085 has the following types of buses. They are : address bus, data bus and control bus Address bus: used to specify a physical memory address. This can include primary memory (e.g. RAM and ROM) secondary memory (e.g. hard disk drives) and any other connected devices. Address bus is unidirectional. This is because the address is an identification number used by the microprocessor to identify or access a memory location or I/O device. it is an output signal from the microprocessor. Data bus: connects the microprocessor (CPU) with other devices mapped onto the system. The data bus is bi-directional. This is because the microprocessor has to fetch (read) the data from memory or input device fro processing and after processing, it has to store (write) the data to memory or output device. Control bus: carries commands from and returns status signals to the microprocessor. The control unit inside a CPU manages the internal control bus — internal to the CPU — and the external control bus. Bus Structure of 8085 Microprocessor Pin Diagram of Microprocessor 8085 Pin Description of Microprocessor 8085 The pins on the chip can be grouped into 6 groups: 1. Address Bus. 2. Data Bus. 3. Control and Status Signals. 4. Power supply and frequency. 5. Externally Initiated Signals. 6. Serial I/O ports. 1. Address Bus: The 8085 microprocessor has 8 signal line, A15 - A8 which are unidirectional & used as a high order address bus. 2. Data Bus: The signal line AD7 - AD0 are bidirectional for dual purpose. They are used as low order address bus as well as data bus. Pin Description of Microprocessor 8085 3. Control signal and Status signal: Control Signal RD bar - It is a read control signal (active low). It is active when memory read the data. WR bar - It is a write control signal (active low). It is active when written into selected memory. Status signal ALE (Address Latch Enable) - When ALU is high, 8085 microprocessor uses address bus. When ALU is low, 8085 microprocessor uses data bus. IO/M bar - This is a status signal used to differentiate between i/o and memory operation. When it is high, it indicates an i/o operation and when it is low, it indicates memory operation. S1 and S0 - These status signal, similar to i/o and memory bar, can identify various operation, but they are rarely used in small system. Pin Description of Microprocessor 8085 4. Power Supply and Frequency signal: Vcc - +5v power supply. Vss (GND) - ground reference. X1, X2 - A crystal is connected at these two pins. The frequency is internally divided by two operate system at 3-MHz, the crystal should have a frequency of 6-MHz. CLK out - This signal can be used as the system clock for other devices. Pin Description of Microprocessor 8085 5. Externally initiated signal: INTR(i/p) • Interrupt request. INTA bar (o/p) • It is used as acknowledge interrupt. TRAP(i/p) • This is non-maskable interrupt and has highest priority. HOLD(i/p) It is used to hold the executing program. Indicates that another Master is requesting the use of the Address and Data buses. The CPU, upon receiving the Hold request will relinquish the use of buses as soon as the completion of the current machine cycle. Processor can regain the buses only after the Hold is removed. HLDA(o/p) • Hold acknowledge. Indicates that the CPU has received the Hold request and that it will relinquish the buses in the next clock cycle. Pin Description of Microprocessor 8085 5. Externally initiated signal: READY(i/p) - This signal is used to delay the microprocessor read or write cycle until a slow responding peripheral is ready to accept or send data. RESET IN bar - sets the program counter is set to zero, the bus are tri-stated, & MPU is reset. RESET OUT - This signal indicate that MPU is being reset. The signal can be used to reset other devices. RST 7.5, RST 6.5, RST 5.5 (Request interrupt) - It is used to transfer the program control to specific memory location. They have higher priority than INTR interrupt. Pin Description of Microprocessor 8085 6. Serial I/O ports: The 8085 microprocessor has two signals to implement the serial transmission which are SID (serial input data) and SOD (serial output data). Interfaces between memory and I/O devices • In every microprocessor, the memory is the central part of microprocessor. • Microprocessor need to access memory quite frequently to read instructions and data stored in memory, and the memory interfacing circuit enables that access. • Any application of a microprocessor based system requires the transfer of data between external circuitry to the microprocessor and vice versa. • User can give information to the microprocessor using keyboard and user can see the result or output information form the microprocessor with the help of display device. • The transfer of data between keyboard and microprocessor, and between microprocessor and display device is called input/output data transfer or I/O data transfer. • An interface: • involves designing a circuit that will match the memory requirements with the microprocessor signal. • is a concept that refers to a point of interaction between components, and is applicable at the level of both hardware and software. Interfaces between memory and I/O devices • This allows a component (such as a graphics card or an Internet browser) to function independently while using interfaces to communicate with other components via an input/output system and an associated protocol. • Memory has certain signal requirements to read from and write into memory. Similarly, microprocessor initiates the set of signals when it wants to read from and write into memory. • There are two types of interfacing in context of the 8085 processor. • Memory Interfacing • I/O Interfacing Interfaces between memory and I/O devices Memory Interfacing • While executing an instruction, there is a necessity for the microprocessor to access memory frequently for reading various instruction codes and data stored in the memory. • The interfacing circuit aids in accessing the memory. • Memory requires some signals to read from and write to registers. Similarly the microprocessor transmits some signals for reading or writing a data. But what is the purpose of interfacing circuit here? • The interfacing process involves matching the memory requirements with the microprocessor signals. The interfacing circuit therefore should be designed in such a way that it matches the memory signal requirements with the signals of the microprocessor. • For example for carrying out a READ process, the microprocessor should initiate a read signal which the memory requires to read a data. • In simple words, the primary function of a memory interfacing circuit is to aid the microprocessor in reading and writing a data to the given register of a memory chip. I/O Interfacing • Keyboard and displays are used as communication channel with outside world. So it is necessary that we interface keyboard and displays with the microprocessor. This is called I/O interfacing. • In this type of interfacing we use latches and buffers for interfacing the keyboards and displays with the microprocessor. • But the main disadvantage with this interfacing is that the microprocessor can perform only one function. It functions as an input device if it is connected to buffer and as an output device if it is connected to latch. Thus the capability is very limited in this type of interfacing. 8085 Interfacing Pins Higher Address Bus 8085 Lower Address/Data Bus ALE IO/M RD WR READY A15 – A8 AD7 – AD0 Microprocessor Operation • Fetch • Decode • Execute Fetch – Execute Cycle Fetch Cycle • Fetch the Instruction from Main Memory The CPU presents the value of the program counter on the address bus. The CPU then fetches the instruction from main memory via the data bus into the Instruction Register. • Decode the Instruction The instruction decoder (ID) interprets and implements the instruction Execute Cycle • Get Data from Main Memory Fetch required data from main memory to be processed and placed into registers. • Execute the Instruction Control signals are initialized to process the data using ALU and write the result back to a register. • Store Results The result generated by the operation is stored in the main memory, or sent to an output device. Semiconductor Memories • Memory refers to any device that stores information for later use. The memory of a computer can be divided into two categories: primary and secondary memory. • Primary memories are semiconductor memories. • Semiconductor memory is a device used for storing digital information that is made up by using integrated circuit technology. • Semiconductor memory technology is an essential element of today's electronics. • Indeed as processors have become more popular and the number of microprocessor controlled items has increased so has the requirement for semiconductor memory. • With the rapid growth in the requirement for semiconductor memories there have been a number of technologies and types of memory that have emerged. Names such as ROM, RAM, EPROM, EEPROM, DRAM, SRAM, SDRAM, and the very new MRAM can now be seen in the electronics literature. Semiconductor Memories • RAM - Random Access Memory: As the names suggest, the RAM or random access memory is a form of semiconductor memory technology that is used for reading and writing data in any order as required. It is used for such applications as the computer or processor memory where variables and other stored and are required on a random basis. Data is stored and read many times to and from this type of memory. • ROM - Read Only Memory: A ROM is a form of semiconductor memory technology used where the data is written once and then not changed. In view of this it is used where data needs to be stored permanently, even when the power is removed - many memory technologies lose the data once the power is removed. • PROM: PROM refers to the kind of ROM that the user can burn information into. In other words, PROM is a user-programmable memory. For every bit of the PROM, there exists a fuse. PROM is programmed by blowing the fuses. If the information burned into PROM is wrong, that PROM must be discarded since its internal fuses are blown permanently. For this reason, PROM is also referred to as OTP (one-time programmable). Programming ROM, also called burning ROM, requires special equipment called a ROM burner or ROM programmer. Semiconductor Memories • EPROM (Erasable Programmable Read Only Memory. ): This form of semiconductor memory can be programmed and then erased at a later time. EPROM was invented to allow making changes in the contents of PROM after it is burned. In EPROM, one can program the memory chip and erase it thousands of times. This is especially necessary during development of the prototype of a microprocessorbased project. A widely used EPROM is called UV-EPROM, where UV stands for ultraviolet. The only problem with UV-EPROM is that erasing its contents can take up to 20 minutes. All UV-EPROM chips have a window through which the programmer can shine ultraviolet (UV) radiation to erase its contents. For this reason, EPROM is also referred to as UV-erasable EPROM or simply UV-EPROM. Semiconductor Memories • EEPROM (Electrically Erasable Programmable Read Only Memory. ): Data can be written to it and it can be erased using an electrical voltage. EEPROM has several advantages over EPROM, such as the fact that its method of erasure is electrical and therefore instant, as opposed to the 20-minute erasure time required for UV-EPROM. In addition, in EEPROM one can select which byte to be erased, in contrast to UVEPROM, in which the entire contents of ROM are erased. However, the main advantage of EEPROM is that one can program and erase its contents while it is still in the system board. It does not require physical removal of the memory chip from its socket. In other words, unlike UV-EPROM, EEPROM does not require an external erasure and programming device. To utilize EEPROM fully, the designer must incorporate the circuitry to program the EEPROM into the system board . In general, the cost per bit for EEPROM is much higher than for UV-EPROM. Semiconductor Memories • DRAM: Dynamic RAM is a form of random access memory. DRAM uses a capacitor to store each bit of data, and the level of charge on each capacitor determines whether that bit is a logical 1 or 0. However these capacitors do not hold their charge indefinitely, and therefore the data needs to be refreshed periodically. As a result of this dynamic refreshing it gains its name of being a dynamic RAM. DRAM is the form of semiconductor memory that is often used in equipment including personal computers and workstations where it forms the main RAM for the computer. • SRAM: Static Random Access Memory. This form of semiconductor memory gains its name from the fact that, unlike DRAM, the data does not need to be refreshed dynamically. It is able to support faster read and write times than DRAM (typically 10 ns against 60 ns for DRAM), and in addition its cycle time is much shorter because it does not need to pause between accesses. However it consumes more power, is less dense and more expensive than DRAM. As a result of this it is normally used for caches, while DRAM is used as the main semiconductor memory technology. Semiconductor Memories • SDRAM: Synchronous DRAM. This form of semiconductor memory can run at faster speeds than conventional DRAM. It is synchronised to the clock of the processor and is capable of keeping two sets of memory addresses open simultaneously. • MRAM: This is Magneto-resistive RAM, or Magnetic RAM. It is a non-volatile RAM memory technology that uses magnetic charges to store data instead of electric charges. Unlike technologies including DRAM, which require a constant flow of electricity to maintain the integrity of the data, MRAM retains data even when the power is removed. An additional advantage is that it only requires low power for active operation. As a result this technology could become a major player in the electronics industry now that production processes have been developed to enable it to be produced.