- Missouri State University
advertisement

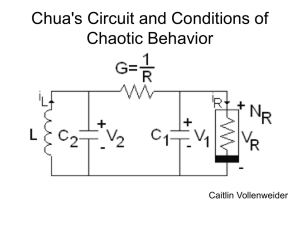
Chaotic systems and Chua’s Circuit by Dao Tran Missouri State University KME Alpha Chapter Presented at KME Regional Meeting, Emporia State University, KANSAS Outline ► Linear systems ► Nonlinear systems Local behavior Global behavior ► Chaos and Chua’s Circuit Bifurcation Periodic orbits Strange attractors Motivation/Application Secure Communication S(t) Information signal Transmitter (Chaotic) y(t) S’(t) Receiver Transmitted signal Retrieved signal Transmitter Chaos generator (Chua’s circuit) Message signal Vc(t) Buffer + Inverter r(t) Motivation/Application Receiver r(t) Chaos generator (Chua’s circuit) Buffer Vc(t) s’(t) - What is Chaotic System? ► Phenomenon that occurs widely in dynamical systems ► Considered to be complex and no simple analysis ► Study of chaos can be used in real-world applications: secure communication, medical field, fractal theory, electrical circuits, etc. What is Chua’s Circuit? ► Autonomous circuit consisting two capacitors, inductor, resistor, and nonlinear resistor. ► Exhibits a variety of chaotic phenomena exhibited by more complex circuits, which makes it popular. ► Readily constructed at low cost using standard electronic components Linear systems ► Linear System of D.E . X AX n ; X R X (0) X 0 ► General solution X (t ) e At X 0 ► The solution is explicitly known for any t. Linear systems (cont.) ► Stability ► Equilibrium . X AX points ► If Re(λ)<0 => Stable ► If Re(λ)>0 => Unstable Linear systems (cont.) ► Stability ►Stability of linear systems is determined by eigenvalues of matrix A. ► Invariant Sets ►(Generalized) eigenvectors corresponding to eigenvalues λ with negative, zero, or positive real part form the stable, center, and unstable subspaces, respectively. Linear Systems (cont.) Consider the linear RLC circuit Applying KCL law and choosing V2 and IL as state variables ,we obtain the differential equation: 1 dI 3 V2 L dt , where G 1 / R dV 2 1 I 3 G V2 C2 C2 dt Linear System (cont.) With the fixed values of R, L, and C, using MATLAB, we obtained the solution Nonlinear systems . X F ( X ); X R n F R n R n ► Even for F smooth and bounded for all t є R, the solution X (t) may become unpredictable or unbounded after some finite time t. ► We divide the study of nonlinear systems into local and global behavior. Local Behavior ► Idea: use linear systems theory to study nonlinear systems, at least locally, around some special sets, a technique known as linearization. ► In this work, we consider: ►Linearization around equilibrium points. ►Linearization around periodic orbits. Local Behavior (cont.) ► Linearization around equilibrium points ►Equilibrium point is hyperbolic if no eigenvalues of the Jacobian at the equilibrium point has zero real part. ►Hartman-Grobman Theorem: nonlinear system has equivalent structure as linearized system, with A=DF(x0), around hyperbolic equilibrium points. Local behavior (cont.) Linear system Non-linear system Local behavior (cont.) ► Linearization ►A around periodic orbits periodic solution satisfies . X F( X ) , with A DF ( X ) X (t ) X (t ) ► Find periodic orbit by solving the BVP . X F(X ) X (0) X ( ) ► Determine the Jacobian matrix A(t) = DF(δ) Local behavior (cont.) ► The fundamental matrix of a linear system is the solution of . A(t ) (0) I ► If the periodic orbit has period t, then we define the monodromy matrix as (t ) ► Stability ► If ► If |µ|<1, stability |µ|>1, unstability monodromy matrix has exactly one eigenvalue with |µ|=1, then the periodic orbit is called hyperbolic ► If Local behavior (cont.) ► Consider the nonlinear system . x x y x 3 xy2 . y x y x2 y y3 . z z ► This system has periodic orbit (cos t, sin t, 0), of period 2 Local behavior (cont.) 1 3x 2 y 2 1 2 xy 0 2 2 J F ( x) 1 2 xy 1 x 3y 0 0 0 ► Linearization about the periodic orbit is the linear system x Ax where A is Jacobian evaluated at the periodic orbit, namely: 2 cos 2 t A(t ) 1 sin 2t 0 . 1 sin 2t 0 2 2 sin t 0 0 Local behavior (cont.) ► The corresponding linear system has a fundamental matrix: e 2t cos t (t ) e 2t sin t 0 ► We evaluate (t ) at 2 sin t 0 cos t 0 0 et to get monodromy matrix. For α=1/2, MATLAB gives eigenvalues 0,1 and 4.8105, 1.0. Global Behavior ► Study is more complex ► One investigates phenomena such as heteroclinic and homoclinic trajectories, bifurcations, and chaos. ► we focus in chaos, but this is closely related to the other concepts and phenomena mentioned above. Chaos and Chua’s Circuit Main goal is to give brief introduction to underlying ideas behind the notion of chaos, by studying the system that models Chua’s circuit. Chua’s circuit consists of two capacitors C1, C2, one inductor L, one resistor R, and one non-linear resistor (Chua’s diode). Chua’s Circuit (cont.) If we let X1 = V1, X2 = V2 and X3 = I3, Chua's circuit is . X 1 [ X 2 h ( x )] . X 2 X1 X 2 X 3 . X 3 X 2 where 14.3 h( x ) x 2 2 3 x 7 14 x 1 arctan( 10 x ) x 1 Chua’s Circuit (cont.) If we let X1 = V1, X2 = V2 and X3 = I3, the Chua's circuit is X 1 [ X 2 h( x )] X 2 X1 X 2 X 3 X X 3 2 where 14.3 h( x ) x 2 2 3 x 7 14 h ' ( x1 ) a1 x 1 arctan( 10 x ) The Jacobian matrix is where x 1 h ' ( x1 ) J ( x) 1 1 0 1 1 0 1 1 (a0 a1 ) 2 2 1 100( x 1) 1 100( x 1) 10 Chua’s circuit (cont.) ► At (0,0,0) we have 0 0 0 J F 0 1 1 1 0 0 0 ► Eigenvalues are 1 1 4( ) 2 Bifurcation Bifurcation diagram starting value α = -1 (AUTO 2000) Plot shows norm of the solution ||x|| versus parameter α. Periodic orbits Following Hopf bifurcation, two periodic orbits appear. The first with period 2.2835 (for α =8.19613) and the second with period 19.3835 (for α=11.07941) 1st periodic orbit 2nd periodic orbit Periodic orbit (cont.) Sensitivity to initial data To show that this dynamical system is sensitive to small changes in the data (one sign of the presence of chaos), we solve the system again for α=8.196 (not=8.196013). However, we obtain a different periodic orbit, which seems to “encircle” the previous one. Strange attractors Strange attractors (cont.) Strange attractor (cont.) Finally, we compute another strange attractor solution to Chua’s circuit, which is known in literature as double-scroll attractor. This type of attractor has been mistaken for experimental noise, but they are now commonly found in digital filter and synchronization circuits. -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 Conclusions ► Chua’s circuit is simple and has a rich variety of phenomena: ► Equilibrium points, periodic orbits ► Bifurcations and chaos ► Signs of chaos: ► Sensitivity to initial data ► Strange attractors ► Unpredictability ► Chaos can be understood with elementary knowledge of linear algebra and differential equations References [1] W. E. Boyce, R.C. DiPrima, Elementary Differential Equations, seventh edition, John Wiley & Sons, Inc. (2003) [2] L. Dieci and J. Rebaza, “ Point to point and point to periodic connections”, BIT, Numerical Mathematics. To appear, 2004. [3] E. Doedel, A. Champneys, T. Fairgrieve, Y. Kuznetsov, B. Sandstede, and X. Wang. AUTO 2000: Continuation and bifurcation software for ordinary differential equations. (2000). ftp://ftp.cs.concordia.ca. [4] J. Hale and H. Kocak, Dynamics and Bifurcations, third edition, Springer Verlag (1996). [5] M. P. Kennedy, “Three steps to chaos, I: Evolution”, IEEE Transactions on circuits and Systems, Vol. 40, No 10 (1993) pp. 640-656. [6] M. P. Kennedy, “Three steps to chaos, II: A Chua’s circuit primer”, IEEE Transactions on circuits and Systems, Vol. 40, No 10 (1993) pp. 657-674. [7] Lawrence Perko, Differential Equations and Dynamical Systems. Springer-Verlag, New York. (1991). [8] L. Torres and L. Aguirre, “ Inductorless Chua’s circuit”, Electronic letters, Vol. 36, No 23 (2000) pp. 1915-1916.