307_Wk13
advertisement

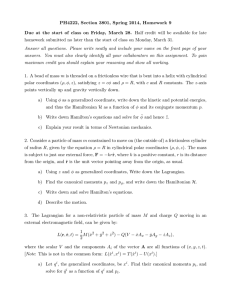
LECTURE NOTES FOR PHYSICS 307: CLASSICAL MECHANICS TEXT: THORNTON AND MARION'S CLASSICAL MECHANICS OF PARTICLES AND SYSTEMS SOME USEFUL REFERENCE STUFF: Greek alphabet, metric prefixes, conversion factors ASIGNMENTS: (Subject to change: check back often.) HW#9: Due Friday, Nov. 21: Calculate the Lagrangians for Problems 7.7, 9, 12, 15. HW #10: Due Friday, Dec. 5: m1r1 m2 r2 m2 m1 1A. Given rcm and r r1 r2 , show that r1 rcm r and r2 rcm r. m1 m2 m1 m2 m1 m2 m2 m1 1B. Given r1 rcm r and r2 rcm r , show that T 12 m1 m2 rcm2 12 r 2 . m1 m2 m1 m2 2. Given F rˆF ( r ) , show that F 0 . (Use spherical coördinates.) 3. Problem 8.2. (HINT: Start with Eq. 8.39, and use the "arccosine integral".) "Dailies": Tuesday, Nov. 18: Calculate the Lagrangian for Problem 7.7. Tuesday, Dec. 2: Solve the Hamiltonian for the simple Atwood machine: H = p2/2(m+M) + (m-M)gy. Thursday, Dec. 4: Verify that dH/dp for a pendulum in an upwardly accelerating elevator is consistent with the definition of p: H at 2 p2 at 2 2 2 1 ma t sin p sin mg l cos 2 2 l 2ml 2 WEEK 13: GO TO LECTURE 21, 22 LECTURE 21: SECTION 7.1-6 (Return to top.) SECTION 7.10: HAMILTONIAN DYNAMICS There is just one more item for us to look at which is a result of Hamilton's Principle. It is yet another procedure for solving dynamics problems, known as Hamilton's equations. Its main charms relative to the Lagrangian formalism are the following: 1) It produces first order differential equations instead of second order. 2) It introduces a class of generalized momenta corresponding to the various generalized coordinates. 3) It is related to the left-hand side of Schrödinger's equation, and thus provides a bridge between classical mechanics and quantum mechanics. 4) It replaces the philosophically troubling quantity "action" with a quantity, the "Hamiltonian", equal to the mechanical energy for some systems. The first step in developing this new formalism is to define the generalized momenta. For each of the generalized coordinates, qj, the corresponding generalized momentum, pj, is given by pj L q j we can now define the Hamiltonian as H q j p j L (If the coordinates are independent of time, and if the potential energy is independent of velocity, then this Hamiltonian, H, is equal to the total mechanical energy: H = T + U.) Lagrange's equations of motion give rise to the following "canonical equations of motion", also known as Hamilton's equations of motion: q j H p j p j H q j LECTURE 22: SECTION 7.7-10 (Return to top.) We will do a handful of problems that we have already done as Newtonian dynamics problems, or even as Lagrangian dynamics problems, using this new technique --- the projectile, a block on an incline, the spherical pendulum, and/or the the double pendulum. Again, as with the Lagrangian problems, we will only set up the differential equations, rather than solve them. Generally, problems that invite the use of Hamilton's equations are difficult problems which give rise to ugly differential equations. Our primary goal in this chapter is to show you how to set up these problems and get to those ugly differential equations, but not to sweat the math. (That's for your Math Methods prof to make you do.) YSBATs Return to syllabus Return to Koon’s homepage