THE LAPLACE TRANSFORM
advertisement

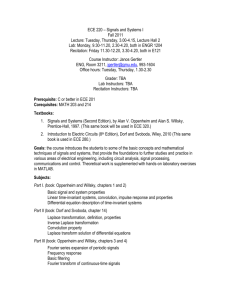
1. The Laplace Transform The Laplace transform technique will be the most important mathematical tool at our disposal in this course. In this section we will not spend too much time deriving it rigorously, or proving zones of convergence. Instead, we will focus on using the transform technique to solve ordinary differential equations. In performing the Laplace transform, we will convert equations from the time domain to the sdomain, where s is a complex number. As we will see, transforming an equation into the s domain will convert it from an ODE into an algebraic equation that we will find much easier to manipulate. The Laplace tranform of a function f(t) is defined as ∞ 𝐿[𝑓(𝑡)] = 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 (1.1) 0 Please observe the notation used during the transform (1.2) 𝑓(𝑡) → 𝐹(𝑠) In this class, functions in the time domain will be written in lowercase, while functions in the sdomain will be written in uppercase. We can take the inverse Laplace transform to go from the sdomain back to the time domain. 𝐿−1 [𝐹(𝑠)] = 𝑓(𝑡) (1.3) To illustrate the technique, let us perform a few simple examples 𝑓(𝑡) = 1 ∞ 𝑓(𝑡) = 𝐴 𝑓(𝑡) = 𝐵𝑡 ∞ 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 0 ∞ 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 0 ∞ 𝐹(𝑠) = ∫ 𝑒 0 ∞ −𝑠𝑡 𝑑𝑡 0 𝐹(𝑠) = ∫ 𝐴𝑒 ∞ −𝑠𝑡 𝐹(𝑠) = ∫ 𝐵𝑡𝑒 −𝑠𝑡 𝑑𝑡 𝑑𝑡 0 ∞ 0 ∞ 1 𝐹(𝑠) = − 𝑒 −𝑠𝑡 | 𝑠 0 𝐴 𝐹(𝑠) = − 𝑒 −𝑠𝑡 | 𝑠 0 1 𝐹(𝑠) = − (𝑒 −𝑠∙∞ − 𝑒 𝑠∙0 ) 𝑠 1 𝐹(𝑠) = 𝑠 𝐴 𝐹(𝑠) = − (𝑒 −𝑠∙∞ − 𝑒 𝑠∙0 ) 𝑠 𝐴 𝐹(𝑠) = 𝑠 𝐹(𝑠) = 𝐹(𝑠) = − −𝑠𝑡 − 1 −𝑠𝑡 ∞ 𝐵𝑒 | 𝑠2 0 𝐵 [(𝑠 ∙ ∞ + 1)𝑒 −𝑠∙∞ − 1(𝑒 𝑠∙0 ) ] 𝑠2 𝐵 𝐹(𝑠) = 2 𝑠 1 𝑓(𝑡) = 𝑒 −𝑐𝑡 𝑓(𝑡) = 𝑡 2 ∞ ∞ 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 0 ∞ 0 ∞ 𝐹(𝑠) = ∫ 𝑒 −𝑐𝑡 𝑒 −𝑠𝑡 𝑑𝑡 𝐹(𝑠) = ∫ 𝑡 2 𝑒 −𝑠𝑡 𝑑𝑡 0 ∞ 0 ∞ 𝑠 2 𝑡 2 + 2𝑠𝑡 + 2 −𝑠𝑡 𝐹(𝑠) = − 𝑒 | 𝑠3 0 𝐹(𝑠) = ∫ 𝑒 −(𝑐+𝑠)𝑡 𝑑𝑡 0 ∞ 1 −(𝑐+𝑠)𝑡 𝐹(𝑠) = − 𝑒 | 𝑐+𝑠 0 𝐹(𝑠) = [− 𝐹(𝑠) = [− 1 1 𝑒 −(𝑐+𝑠)∙∞ ] + 𝑒0 𝑐+𝑠 𝑐+𝑠 1 𝐹(𝑠) = 𝑐+𝑠 𝑠 2 ∙ ∞2 + 2𝑠 ∙ ∞ + 2 −∞ 2 𝑒 ] + [ 3 𝑒 0] 3 𝑠 𝑠 𝐹(𝑠) = 2 𝑠3 Clearly, performing the Laplace transforms by hand is tedious and time-consuming. Therefore, for the remainder of the course we will make use of the Laplace transform tables on pages 18-19 in your textbook. Let us perform a few examples using this table 𝑓(𝑡) = 𝑡 4 𝑓(𝑡) = 20 sin 5𝑡 𝑓(𝑡) = 𝑒 5𝑡 − 𝑒 −5𝑡 Row 5 Row 10 Row 6 (or Row 12) 𝐹(𝑠) = 24 𝑠5 20 ∙ 5 𝑠 2 + 52 100 𝐹(𝑠) = 2 𝑠 + 25 𝐹(𝑠) = 1 1 − 𝑠−5 𝑠+5 𝑠+5 𝑠−5 𝐹(𝑠) = − (𝑠 − 5)(𝑠 + 5) (𝑠 − 5)(𝑠 + 5) 𝐹(𝑠) = 𝐹(𝑠) = 𝑠2 𝑓(𝑡) = 10𝑒 −5𝑡 cos 100𝑡 𝑓(𝑡) = 𝐴 + 𝐵 cos 𝑐𝑡 Row 21 Rows 1 and 11 𝐹(𝑠) = 10 ∙ 𝑠+5 (𝑠 + 5)2 + 10,000 𝐹(𝑠) = 10 − 25 𝐴 𝐵𝑠 + 2 𝑠 𝑠 + 𝑐2 2 Laplace Transform of Derivatives So far this seems like a relatively useless mathematical exercise. The true usefulness of the Laplace transform lies in its ability to change differential equations into algebraic equations. To see how this might work, let’s try to take the Laplace transform of the derivative of a function. ∞ 𝑑𝑡 𝑑𝑓 −𝑠𝑡 𝐿[ ] = ∫ 𝑒 𝑑𝑡 𝑑𝑡 𝑑𝑡 (1.4) 0 To perform the integration, we’ll use the “integration by parts” formula. (1.5) ∫ 𝑢 𝑑𝑣 = 𝑢 𝑣 − ∫ 𝑣 𝑑𝑢 In this case 𝑣 = 𝑓(𝑡) 𝑑𝑣 = 𝑑𝑓 𝑑𝑡 𝑑𝑡 𝑢 = 𝑒 −𝑠𝑡 𝑑𝑢 = 𝑑𝑢 𝑑𝑡 = −𝑠𝑒 −𝑠𝑡 𝑑𝑡 𝑑𝑡 (1.6) Substituting these into the integration by parts formula we have ∞ 𝑑𝑓 −𝑠𝑡 𝐿 [ ] = 𝑓(𝑡)𝑒 −𝑠𝑡 |∞ 𝑑𝑡 0 + 𝑠 ∫ 𝑓(𝑡)𝑒 𝑑𝑡 ∞ 𝐿[ (1.7) 0 𝑑𝑓 ] = −𝑓(0) + 𝑠 ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 𝑑𝑡 (1.8) 0 but, from the definition of the Laplace transform ∞ 𝐹(𝑠) = ∫ 𝑓(𝑡)𝑒 −𝑠𝑡 𝑑𝑡 0 Thus, we have 𝐿[ 𝑑𝑓 ] = 𝑠𝐹(𝑠) − 𝑓(0) 𝑑𝑡 (1.9) Similarly, the transform of the second derivative is 𝐿[ 𝑑2𝑓 ] = 𝑠 2 𝐹(𝑠) − 𝑠𝑓(0) − 𝑓̇ (0) 𝑑𝑡 2 (1.10) and for the third 3 𝑑3𝑓 𝐿 [ 3 ] = 𝑠 3 𝐹(𝑠) − 𝑠 2 𝑓(0) − 𝑠𝑓̇ (0) − 𝑓̈ (0) 𝑑𝑡 (1.11) In other words, a derivative in the time domain is equivalent to multiplying a function by s in the Laplace domain. In this way we can convert differential equations in the time domain into algebraic equations in the Laplace domain. To show how useful this is, we will try an example. Example: Estimate the cooking time for a baked potato. Assume the oven is at θoven, and the potato is a sphere of water with mass m and surface area A. Let the convective heat transfer coefficient be h. First we must know something about the physics of baking. If we draw a control volume at the skin of the potato, we can write a statement of conservation of energy at this boundary. In words, the statement is: energy flux entering potato from oven = rate of change in internal energy of potato The energy enters the potato through convection, thus 𝑊 𝑞̇ 𝑜𝑣𝑒𝑛 = ℎ𝐴(𝜃𝑜𝑣𝑒𝑛 − 𝜃) = ( 2 ) (𝑚2 )(𝐾) = 𝑊 𝑚 ∙𝐾 (1.12) And the rate of change in energy of the potato is 𝑑𝜃 𝐽 𝐾 = (𝑘𝑔) ( )( ) = 𝑊 𝑑𝑡 𝑘𝑔 ∙ 𝐾 𝑠 (1.13) 𝑚𝐶𝑝 𝑑𝜃 = ℎ𝐴(𝜃𝑜𝑣𝑒𝑛 − 𝜃) 𝑑𝑡 (1.14) 𝑚𝐶𝑝 𝑑𝜃 + ℎ𝐴𝜃 = ℎ𝐴𝜃𝑜𝑣𝑒𝑛 𝑑𝑡 (1.15) ℎ𝐴 𝑚𝐶𝑝 (1.16) 𝑞̇ 𝑝𝑜𝑡𝑎𝑡𝑜 = 𝑚𝐶𝑝 Equating these two quantities gives or Dividing through by mCp and defining 𝐶= gives 𝑑𝜃 + 𝐶𝜃 = 𝐶𝜃𝑜𝑣𝑒𝑛 𝑑𝑡 (1.17) Taking the Laplace transform of both sides gives 4 (𝑠Θ − 𝜃0 ) + 𝐶Θ = 𝐶𝜃𝑜𝑣𝑒𝑛 𝑠 (1.18) Solving this equation for Θ gives Θ= 𝜃0 𝐶𝜃𝑜𝑣𝑒𝑛 + 𝑠 + 𝐶 (𝑠 + 𝐶)𝑠 (1.19) From this we can take the inverse Laplace transform (row 14), giving 𝜃(𝑡) = 𝜃0 𝑒 −𝐶𝑡 + 𝜃𝑜𝑣𝑒𝑛 (1 − 𝑒 −𝐶𝑡 ) (1.20) 𝜃(𝑡) = 𝜃𝑜𝑣𝑒𝑛 + (𝜃0 − 𝜃𝑜𝑣𝑒𝑛 )𝑒 −𝐶𝑡 (1.21) This is the desired solution. The method of the Laplace transform provided us with a simple, methodical way of solving an ordinary differential equation subject to initial conditions. To reinforce the method, we will perform a few more examples. Example Find the solution to the following second order differential equation. (1.22) 𝑦̈ + 4𝑦̇ + 20𝑦 = 𝛿 where δ is the unit impulse. Assume that y(0) = 0 and 𝑦̇ (0) = 3. Solution: First, take the Laplace transform of both sides 𝑠 2 𝑌 − 𝑠𝑦(0) − 𝑦̇ (0) + 4(𝑠𝑌 − 𝑦(0)) + 20𝑌 = 1 𝑌(𝑠 2 + 4𝑠 + 20) = 1 + 3 4 𝑌= (𝑠 + 2)2 + 16 (1.23) Now take the inverse transform, using Row 20 in the table 𝑦(𝑡) = 𝑒 −2𝑡 sin 4𝑡 (1.24) Example Find the solution to the following second order differential equation 𝑦̈ + 4𝑦 = 𝑡 (1.25) Assume that initial conditions are zero. Solution: First, take the Laplace transform of both sides 5 𝑠 2 𝑌 − 𝑠𝑦(0) − 𝑦̇ (0) + 4𝑌 = (𝑠 2 + 4)𝑌 = 1 𝑠2 𝑌= 1 𝑠2 1 𝑠 2 (𝑠 2 + 4) 1 8 𝑌= [ 2 2 ] 8 𝑠 (𝑠 + 4) (1.26) (1.27) This looks like the transform in Row 26. Taking the inverse gives 1 𝑦(𝑡) = (2𝑡 − sin 2𝑡) 8 (1.28) Example Find the solution to the following second order differential equation 𝑦̈ + 𝑦 = sin 5𝑡 (1.29) Assume that initial conditions are zero. Solution: The Laplace transform of the left side of the equation is the same as in the first example. On the right side we use Row 10 to obtain 5 + 25 5 (𝑠 2 + 1)𝑌 = 2 𝑠 + 25 1 5 𝑌=[ 2 ][ 2 ] 𝑠 + 1 𝑠 + 25 5 𝑌= 4 𝑠 + 26𝑠 2 + 25 𝑠 2 𝑌 − 𝑠𝑦(0) − 𝑦̇ (0) + 𝑌 = 𝑠2 (1.30) Looking at the Laplace transform table, it’s obvious that there is no readily-available inverse transform for the above expression. We need to transform it into a simpler form that we can find in the table. One way to do this is through the use of partial fractions. We can expand polynomial fractions of the type shown above as follows: 6 𝑎𝑚 𝑠 𝑚 + 𝑎𝑚−1 𝑠 𝑚−1 + ⋯ + 𝑎1 𝑠 + 𝑎0 𝑏𝑛 𝑠 𝑛 + 𝑏𝑛−1 𝑠 𝑛−1 + ⋯ + 𝑏1 𝑠 + 𝑏0 𝑟1 𝑟2 𝑟𝑛 = + + ⋯+ + 𝑘0 + 𝑘1 𝑠 + ⋯ + 𝑘𝑚−𝑛 𝑠 𝑚−𝑛 𝑠 − 𝑝1 𝑠 − 𝑝2 𝑠 − 𝑝𝑛 (1.31) The r terms are called the residues of the polynomial fraction while the p terms are called the poles. They are called poles because whenever s = pi the fraction goes to infinity. The k terms are called direct terms. Normally there will be no direct terms, since the denominator is of higher order than the numerator for most dynamic systems. There are analytical methods for doing the partial fraction expansion, all of which are tedious. For this class, we choose to use the residue function in Matlab. If you type the following expression num = [5]; den = [1 0 26 0 25]; [r,p,k]=residue(num,den) you will get the following result r = 0 0 0 0 + + 0.0208i 0.0208i 0.1042i 0.1042i + + - 5.0000i 5.0000i 1.0000i 1.0000i p = 0 0 0 0 k = [] This means that our fraction can be written 𝑌= 0.0208𝑗 −0.0208𝑗 −0.1042𝑗 0.1042𝑗 + + + 𝑠 − 5𝑗 𝑠 + 5𝑗 𝑠−𝑗 𝑠+𝑗 (1.32) There are still no rows in our table that look exactly like this, but let’s try combining the first two terms 7 𝑌=− 1 5 5 1 + 2 2 24 𝑠 + 25 24 𝑠 + 1 (1.33) Finally, here is form we can use! Both terms look like Row 10 in the table. Performing the inverse transform we have 𝑦(𝑡) = 5 1 sin 𝑡 − sin 5𝑡 24 24 (1.34) MathCAD also has a built-in Laplace and inverse Laplace transform routine, but this is sometimes difficult to use. Impulses and Time Shifting We are often interested in the response of a system to a single disturbance that is limited in time. For example, the behavior of a car after hitting a bump in the road is an important part of suspension design. Or we may be interested in the transient response of a loudspeaker system (as to a snare drum hit, for example). Such disturbances may be modeled mathematically by an impulse. An impulse is a disturbance of infinite magnitude that occurs in zero time. Obviously, impulses do not exist as such in nature, but any disturbance that is of short duration relative to the speed of response of a system can be considered an impulse. We denote the impulse with the symbol δ(t-a), where a is the time at which the impulse occurs. y(t) y(t) a t a Unit impulse and Step Functions t Similarly, the step function is defined as a change in magnitude that occurs in zero time. The step function is written 1(t – a), where a is the time at which the step occurs. We can combine two step functions to create a pulse, which is similar to an impulse, but with finite duration. 𝑦(𝑡) = 1(𝑡 − 𝑎) − 1(𝑡 − 𝑏) (1.35) 8 y(t) a b t A pulse of duration b-a Shifting a function by a time α has the effect of multiplying the Laplace transform by e-αt (see pages 19-21 in text) so that 𝐿[𝑓(𝑡 − 𝛼)1(𝑡 − 𝛼)] = 𝑒 −𝛼𝑠 𝐹(𝑠) (1.36) Using this, we can find the Laplace tranform of a unit pulse to be 𝐹(𝑠) = 𝑒 −𝑎𝑠 𝑒 −𝑏𝑠 − 𝑠 𝑠 (1.37) 1 (1 − 𝑒 −𝑏𝑠 ) 𝑠 (1.38) If a = 0, that is, if the pulse starts at t = 0, then 𝐹(𝑠) = Example Solve the first-order differential equation shown below 𝑦̇ + 2𝑦 = 1(𝑡) − 1(𝑡 − 3) (1.39) Assume y(0) = 0. Solution: Take the Laplace transform of both sides 1 (1 − 𝑒 −3𝑠 ) 𝑠 1 (𝑠 + 2)𝑌 = (1 − 𝑒 −3𝑠 ) 𝑠 1 𝑒 −3𝑠 𝑌= − 𝑠(𝑠 + 2) 𝑠(𝑠 + 2) 𝑠𝑌 − 𝑦(0) + 2𝑌 = (1.40) Taking the inverse transform, we have 𝑦(𝑡) = 1 1 (1 − 𝑒 −2𝑡 ) − (1 − 𝑒 −2(𝑡−3) )1(𝑡 − 3) 2 2 (1.41) 9 0.5 0.4 y ( t ) 0.3 0.2 0.1 0 0 1 2 3 4 5 6 t 10