Backtrack Search
advertisement

Intelligent Backtracking Algorithms
Problem Solving with Constraints
CSCE496/896, Fall2011:
www.cse.unl.edu/~choueiry/F11-496-896
Berthe Y. Choueiry (Shu-we-ri)
Avery Hall, Room 360
choueiry@cse.unl.edu
Problem Solving with Constraints
Intelligent Backtracking Algorithms
1
Reading
• Required reading
– Hybrid Algorithms for the Constraint Satisfaction
Problem [Prosser, CI 93]
• Recommended reading
– Chapters 5 and 6 of Dechter’s textbook
– Tsang, Chapter 5
• Available upon request
– Notes of Fahiem Bacchus: Chapter 2, Section 2.4
Problem Solving with Constraints
Intelligent Backtracking Algorithms
2
Outline
• Review of terminology of search
• Hybrid backtracking algorithms
Problem Solving with Constraints
Intelligent Backtracking Algorithms
3
Backtrack search (BT)
• Variable/value ordering
S
• Variable instantiation
• (Current) path
Var 1
v1
v2
• Current variable
• Past variables
• Future variables
• Shallow/deep levels /nodes
• Search space / search tree
• Back-checking
• Backtracking
Problem Solving with Constraints
Intelligent Backtracking Algorithms
4
Outline
• Review of terminology of search
• Hybrid backtracking algorithms
– Vanilla: BT
– Improving back steps: {BJ, CBJ}
– Improving forward step: {BM, FC}
Problem Solving with Constraints
Intelligent Backtracking Algorithms
5
Two main mechanisms in BT
1. Backtracking:
• To recover from dead-ends
• To go back
2. Consistency checking:
• To expand consistent paths
• To move forward
Problem Solving with Constraints
Intelligent Backtracking Algorithms
6
Backtracking
To recover from dead-ends
1. Chronological (BT)
2. Intelligent
•
•
•
•
Backjumping (BJ)
Conflict directed backjumping (CBJ)
With learning algorithms (Dechter Chapt 6.4)
Etc.
Problem Solving with Constraints
Intelligent Backtracking Algorithms
7
Consistency checking
To expand consistent paths
1. Back-checking: against past variables
•
Backmarking (BM)
2. Look-ahead: against future variables
•
•
•
Forward checking (FC) (partial look-ahead)
Directional Arc-Consistency (DAC) (partial
look-ahead)
Maintaining Arc-Consistency (MAC) (full
look-ahead)
Problem Solving with Constraints
Intelligent Backtracking Algorithms
8
Hybrid algorithms
Backtracking + checking = new hybrids
BT
BJ
CBJ
BM
BMJ
BM-CBJ
FC
FC-BJ
FC-CBJ
Evaluation:
• Empirical: Prosser 93. 450 instances of Zebra
• Theoretical: Kondrak & Van Beek 95
Problem Solving with Constraints
Intelligent Backtracking Algorithms
9
Notations (in Prosser’s paper)
•
•
•
•
•
•
•
Variables: Vi, i in [1, n]
Domain: Di = {vi1, vi2, …,viMi}
Constraint between Vi and Vj: Ci,j
Constraint graph: G
Arcs of G: Arc(G)
Instantiation order (static or dynamic)
Language primitives: list, push, pushnew,
remove, set-difference, union, max-list
Problem Solving with Constraints
Intelligent Backtracking Algorithms
10
Main data structures
• v: a (1xn) array to store assignments
– v[i] gives the value assigned to ith variable
– v[0]: pseudo variable (root of tree), backtracking to
v[0] indicates insolvability
• domain[i]: a (1xn) array to store the original
domains of variables
• current-domain[i]: a (1xn) array to store the
current domains of variables
– Upon backtracking, current-domain[i] of future
variables must be refreshed
• check(i,j): a function that checks whether the
values assigned to v[i] and v[j] are consistent
Problem Solving with Constraints
Intelligent Backtracking Algorithms
11
Generic search: bcssp
1.
2.
3.
4.
5.
6.
Procedure bcssp (n, status)
• Forward move: x-label
Begin
consistent true
• Backward move: x-unlabel
status unknown
• Parameters:
i: current variable,
i1
consistent: Boolean
While status = unknown
• Return:
i: new current variable
7.
Do Begin
8. If consistent
9. Then i label (i, consistent)
10. Else i unlabel (i, consistent)
11. If i > n
12. Then status “solution”
13. Else If i=0 then status “impossible”
14. End
15. End
Problem Solving with Constraints
Intelligent Backtracking Algorithms
12
Chronological backtracking (BT)
• Uses bt-label and bt-unlabel
• bt-label:
– When v[i] is assigned a value from current-domain[i], we perform
back-checking against past variables (check(i,k))
– If back-checking succeeds, bt-label returns i+1
– If back-checking fails, we remove the assigned value from currentdomain[i], assign the next value in current-domain[i], etc.
– If no other value exists, consistent nil (bt-unlabel will be called)
• bt-unlabel
–
–
–
–
Current level is set to i-1 (notation for current variable: v[h])
For all future variables j: current-domain[j] domain[j]
If domain[h] is not empty, consistent true (bt-label will be called)
Note: for all past variables g, current-domain[g] domain[g]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
13
BT-label
1.
2.
3.
4.
Function bt-label(i,consistent): INTEGER
BEGIN
consistent false
For v[i] each element of current-domain[i] while not consistent
5. Do Begin
Terminates:
6. consistent true
• consistent=true, return i+1
7. For h 1 to (i-1) While consistent
• consistent=false, current8. Do consistent check(i,h)
domain[i]=nil, returns i
9. If not consistent
10. Then current-domain[i] remove(v[i], current-domain[i])
11. End
12. If consistent then return(i+1) ELSE return(i)
13. END
Problem Solving with Constraints
Intelligent Backtracking Algorithms
14
BT-unlabel
1.
2.
FUNCTION bt-unlabel(i,consistent):INTEGER
BEGIN
3. h i -1
4. current-domain[i] domain[i]
5. current-domain[h] remove(v[h],current-domain[h])
6. consistent current-domain[h] nil
7. return(h)
• Is called when consistent=false and current-domain[i]=nil
8.
END
• Selects vh to backtrack to
• (Uninstantiates all variables between vh and vi)
• Uninstantiates v[h]: removes v[h] from current-domain [h]:
• Sets consistent to true if current-domain[h] 0
• Returns h
Problem Solving with Constraints
Intelligent Backtracking Algorithms
15
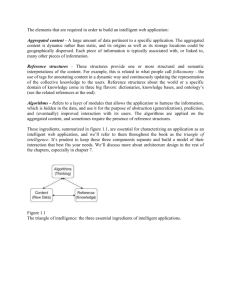
Example: BT (the dumbest example ever)
{1,2,3,4,5}
{1,2,3,4,5}
{1,2,3,4,5}
V1
V2
V3
v[0]
-
v[1]
1
v[2]
1
v[3]
1
CV3,V4={(V3=1,V4=3)}
{1,2,3,4,5}
V4
v[4]
1
2
3
4
etc…
4
5
CV2,V5={(V2=5,V5=1),(V2=5,V5=4)}
{1,2,3,4,5}
V5
v[5]
1
2
3
Problem Solving with Constraints
Intelligent Backtracking Algorithms
16
Outline
• Review of terminology of search
• Hybrid backtracking algorithms
– Vanilla: BT
– Improving back steps: BJ, CBJ
– Improving forward step: BM, FC
Problem Solving with Constraints
Intelligent Backtracking Algorithms
17
Danger of BT: thrashing
• BT assumes that the instantiation of v[i]
was prevented by a bad choice at (i-1).
• It tries to change the assignment of v[i-1]
• When this assumption is wrong, we suffer
from thrashing (exploring ‘barren’ parts of
solution space)
• Backjumping (BT) tries to avoid that
– Jumps to the reason of failure
– Then proceeds as BT
Problem Solving with Constraints
Intelligent Backtracking Algorithms
18
Backjumping (BJ)
• Tries to reduce thrashing by saving some
backtracking effort
• When v[i] is instantiated, BJ remembers
v[h], the deepest node of past variables
that v[i] has checked against.
• Uses: max-check[i], global, initialized to 0
• At level i, when check(i,h) succeeds
1
2
3
0
1
2
3
h-1
h
h-2
i
h
0
0
h-1
max-check[i] max(max-check[i], h)
• If current-domain[h] is getting empty,
simple chronological backtracking is
performed from h
– BJ jumps then steps!
Past variable
Current variable
0
Problem Solving with Constraints
Intelligent Backtracking Algorithms
19
BJ: label/unlabel
• bj-label: same as bt-label, but updates
max-check[i]
• bj-unlabel, same as bt-unlabel but
– Backtracks to h = max-check[i]
– Resets max-check[j] 0 for j in [h+1,i]
Important: max-check is the deepest
level we checked against, could have
been success or could have been
failure
1
2
3
0
1
2
3
h-1
h
h-2
i
h
0
0
h-1
0
Problem Solving with Constraints
Intelligent Backtracking Algorithms
20
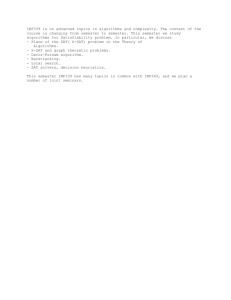
Example: BJ
v[0] = 0
{1,2,3,4,5}
{1,2,3,4,5}
V1
V2
-
v[1]
1
v[2]
1
v[3]
1
Max-check[1] = 0
2
Max-check[2] = 1
CV2,V5={(V2=5,V5=1)}
{1,2,3,4,5} V3
CV2,V4={(V2=1,V4=3)}
{1,2,3,4,5}
V4
CV1,V5={(V1=1,V5=2)}
{1,2,3,4,5}
V5
V4=1, fails for V2, mc=2
V4=2, fails for V2, mc=2
V4=3, succeeds
max-check[4] = 3 v[4]
V5=1, fails for V1, mc=1
V5=2, fails for V2, mc=2
V5=3, fails for V1
V5=4, fails for V1 v[5]
V5=5, fails for V1
max-check[5] = 2
1
1
2
2
3
3
4
4
5
Problem Solving with Constraints
Intelligent Backtracking Algorithms
21
Conflict-directed backjumping (CBJ)
• Backjumping
– jumps from v[i] to v[h],
– but then, it steps back from v[h] to v[h-1]
• CBJ improves on BJ
– Jumps from v[i] to v[h]
– And jumps back again, across conflicts
involving both v[i] and v[h]
– To maintain completeness, we jump back to
the level of deepest conflict
Problem Solving with Constraints
BacktrackingAlgorithms
Intelligent Backtracking
22
CBJ: data structure
0
1
conf-set
2
• Maintains a conflict set: conf-set
g
• conf-set[i] are first initialized to {0}
h-1
• At any point, conf-set[i] is a subset of
h
past variables that are in conflict with i
i
conf-set[g] {0}
conf-set[h] {0}
conf-set[i]
{0}
{0}
{0}
{0}
Problem Solving with Constraints
Intelligent Backtracking Algorithms
23
CBJ: conflict-set
1
2
3
conf-set[i] conf-set[i] {h}
• When current-domain[i] empty
1. Jumps to deepest past variable
h in conf-set[i]
Past variables
• When a check(i,h) fails
g
conf-set[g] {x}
{x, 3,1}
h-1
h
conf-set[h] {3}
{3,1, g}
Current variable i
conf-set[i] {1, g, h}
2. Updates
conf-set[h] conf-set[h] (conf-set[i] \{h})
• Primitive form of learning (while searching)
{0}
{0}
{0}
Problem Solving with Constraints
Intelligent Backtracking Algorithms
24
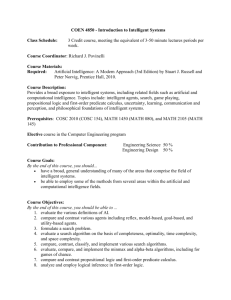
Example CBJ
V1
V2
V3
v[0] = 0
{1,2,3,4,5}
{1,2,3,4,5}
{1,2,3,4,5}
{(V2=1, V4=3), (V2=4, V4=5)}
V4
V5
{1,2,3,4,5}
{1,2,3,4,5}
{1,2,3,4,5}
v[1]
1
conf-set[1] = {0}
v[2]
1
conf-set[2] = {0}
v[3]
1
conf-set[3] = {0}
v[4] 1
2
conf-set[4] = {2}
{(V1=1, V5=3)}
v[5] 1
conf-set[5] = {1}
v[6] 1
{(V4=5, V6=3)}
V6
-
{(V1=1,
2
2
3
conf-set[4] = {1, 2}
3
3
4
5
conf-set[6] = {1}
conf-set[6] = {1}
conf-set[6] = {1,4}
V6=3)}
conf-set[6] = {1,4}
conf-set[6] = {1,4}
Problem Solving with Constraints
Intelligent Backtracking Algorithms
25
CBJ for finding all solutions
• After finding a solution, if we jump from this last
variable, then we may miss some solutions and
lose completeness
• Two solutions, proposed by Chris Thiel (S08)
1. Using conflict sets
2. Using cbf of Kondrak, a clear pseudo-code
• Rationale by Rahul Purandare (S08)
–
–
We cannot skip any variable without chronologically
backtracking to it at least once
In fact, exactly once
Problem Solving with Constraints
Intelligent Backtracking Algorithms
26
CBJ/All solutions without cbf
• When a solution is found, force the last variable,
N, to conflict with everything before it
– conf-set[N] {1, 2, ..., N-1}.
• This operation, in turn, forces some
chronological backtracking as the conf-sets are
propagated backward
Problem Solving with Constraints
Intelligent Backtracking Algorithms
27
CBJ/All solutions with cbf
• Kondrak proposed to fix the problem using
cbf (flag), a 1xn vector
– i, cbf[i] 0
– When you find a solution, i, cbf[i] 1
• In unlabel
– if (cbf[i]=1)
• Then h i-1; cbf[i] 0
• Else h max-list (conf-set[i])
Problem Solving with Constraints
Intelligent Backtracking Algorithms
28
Backtracking: summary
• Chronological backtracking
– Steps back to previous level
– No extra data structures required
• Backjumping
– Jumps to deepest checked-against variable, then
steps back
– Uses array of integers: max-check[i]
• Conflict-directed backjumping
– Jumps across deepest conflicting variables
– Uses array of sets: conf-set[i]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
29
Outline
• Review of terminology of search
• Hybrid backtracking algorithms
– Vanilla: BT
– Improving back steps: BJ, CBJ
– Improving forward step: BM, FC
Problem Solving with Constraints
Intelligent Backtracking Algorithms
30
Backmarking: goal
• Tries to reduce amount of consistency
checking
• Situation:
– v[i] about to be re-assigned k
– v[i]k was checked against v[h]g
v[h] = g
– v[h] has not been modified
v[i] k
k
Problem Solving with Constraints
Intelligent Backtracking Algorithms
31
BM: motivation
•
Two situations
1. Either (v[i]=k,v[h]=g) has failed it will fail again
2. Or, (v[i]=k,v[h]=g) was founded consistent it will
remain consistent
v[h] = g
v[i]
•
k
v[h] = g
k
v[i]
k
k
In either case, back-checking effort against
v[h] can be saved!
Problem Solving with Constraints
Intelligent Backtracking Algorithms
32
Data structures for BM: 2 arrays
•
•
maximum checking level: mcl (n x m)
Minimum backup level: mbl (n x 1)
0 0 0 0
0 0 0 0
0
0
0
0
0
Number of variables n
Number of variables n
max domain size m
Problem Solving with Constraints
33
Maximum checking level
•
•
mcl[i,k] stores the deepest variable that
v[i]k checked against
mcl[i,k] is a finer version of max-check[i]
Number of variables n
max domain size m
0 0 0 0
0 0 0 0
0
0
0
0
0
Problem Solving with Constraints
34
Minimum backup level
mbl[i] gives the shallowest past variable
whose value has changed since v[i] was the
current variable
•
BM (and all its hybrid)
do not allow dynamic
variable ordering
Number of variables n
•
Problem Solving with Constraints
35
When mcl[i,k]=mbl[i]=j
BM is aware that
• The deepest variable that (v[i] k)
checked against is v[j]
• Values of variables in the past of
v[j] (h<j) have not changed
So
• We do need to check (v[i] k)
against the values of the variables
between v[j] and v[i]
• We do not need to check (v[i] k)
against the values of the variables
in the past of v[j]
v[j]
v[i] k
k
mbl[i] = j
Problem Solving with Constraints
Intelligent Backtracking Algorithms
36
Type a savings
When mcl[i,k] < mbl[i], do not check v[i] k because it will fail
v[h]
v[j]
v[i]
k
k
mcl[i,k]=h
mcl[i,k] < mbl[i]=j
Problem Solving with Constraints
Intelligent Backtracking Algorithms
37
Type b savings
When mcl[i,k] mbl[i], do not check (i,h<j) because they will succeed
h
v[j]
v[g]
v[i]
k
mcl[i,k]=g
k
mcl[i,k]mbl[i]
mbl[i] = j
Problem Solving with Constraints
Intelligent Backtracking Algorithms
38
Hybrids of BM
• mcl can be used to allow backjumping in
BJ
• Mixing BJ & BM yields BMJ
– avoids redundant consistency checking (types
a+b savings) and
– reduces the number of nodes visited during
search (by jumping)
• Mixing BM & CBJ yields BM-CBJ
Problem Solving with Constraints
Intelligent Backtracking Algorithms
39
Problem of BM and its hybrids: warning
BMJ enjoys only some of the advantages of BM
Assume: mbl[h] = m and max-check[i]=max(mcl[i,x])=g
• Backjumping from v[i]:
– v[i] backjumps up to v[g]
v[m]
v[m]
v[m]
v[f]
• Backmarking of v[h]:
– When reconsidering v[h], v[h] will
be checked against all f [m,g)
– effort could be saved
• Phenomenon will worsen with
CBJ
• Problem fixed by Kondrak &
van Beek 95
v[g]
v[g]
v[g]
v[h]
v[h]
v[h]
v[i]
v[i]
v[i]
v[h]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
40
Forward checking (FC)
• Looking ahead: from current variable, consider all future
variables and clear from their domains the values that
are not consistent with current partial solution
• FC makes more work at every instantiation, but will
expand fewer nodes
• When FC moves forward, the values in current-domain
of future variables are all compatible with past
assignment, thus saving backchecking
• FC may “wipe out” the domain of a future variable (aka,
domain annihilation) and thus discover conflicts early on.
FC then backtracks chronologically
• Goal of FC is to fail early (avoid expanding fruitless
subtrees)
Problem Solving with Constraints
Intelligent Backtracking Algorithms
41
FC: data structures
• When v[i] is instantiated, current-domain[j] are
filtered for all j connected to i and I < j n
• reduction[j] store sets of values remove from
current-domain[j] by some variable before v[j]
reductions[j] = {{a, b}, {c, d, e}, {f, g, h}}
• future-fc[i]: subset of the future variables that v[i]
checks against (redundant)
future-fc[i] = {k, j, n}
• past-fc[i]: past variables that checked against v[i]
v[i]
v[k]
v[m]
v[j]
v[l]
• All these sets are treated like stacks
v[n]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
42
Forward Checking: functions
•
•
•
•
•
check-forward
undo-reductions
update-current-domain
fc-label
fc-unlabel
Problem Solving with Constraints
Intelligent Backtracking Algorithms
43
FC: functions
• check-forward(i,j) is called when instantiating v[i]
– It performs Revise(j,i)
– Returns false if current-domain[j] is empty, true
otherwise
– Values removed from current-domain[j] are pushed,
as a set, into reductions[j]
• These values will be popped back if we have to
backtrack over v[i] (undo-reductions)
Problem Solving with Constraints
Intelligent Backtracking Algorithms
44
FC: functions
• update-current-domain
– current-domain[i] domain[i] \ reductions[i]
– actually, we have to iterate over reductions, which is a
set of sets
• fc-label
– Attempts to instantiate current-variable
– Then filters domains of all future variables (push into
reductions)
– Whenever current-domain of a future variable is
wiped-out:
• v[i] is un-instantiated and
• domain filtering is undone (pop reductions)
Problem Solving with Constraints
Intelligent Backtracking Algorithms
45
Hybrids of FC
• FC suffers from thrashing: it is based on BT
• FC-BJ:
– max-check is integrated in fc-bj-label and fc-bj-unlabel
– Enjoys advantages of FC and BJ… but suffers
malady of BJ (first jumps, then steps back)
• FC-CBJ:
– Best algorithm so far
– fc-cbj-label and fc-cbj-unlabel
Problem Solving with Constraints
Intelligent Backtracking Algorithms
46
Consistency checking: summary
• Chronological backtracking
– Uses back-checking
– No extra data structures
• Backmarking
– Uses mcl and mbl
– Two types of consistency-checking savings
• Forward-checking
– Works more at every instantiation, but expands fewer
subtrees
– Uses: reductions[i], future-fc[i], past-fc[i]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
47
Experiments
• Empirical evaluations on Zebra
– Representative of design/scheduling problems
– 25 variables, 122 binary constraints
– Permutation of variable ordering yields new search
spaces
– Variable ordering: different bandwidth/induced width
of graph
• 450 problem instances were generated
• Each algorithm was applied to each instance
Experiments were carried out under static variable ordering
Problem Solving with Constraints
Intelligent Backtracking Algorithms
48
Analysis of experiments
Algorithms compared with respect to:
1. Number of consistency checks (average)
FC-CBJ ≼ FC-BJ ≼BM-CBJ ≼ FC ≼ CBJ ≼ BMJ ≼ BM ≼ BJ ≼ BT
2. Number of nodes visited (average)
FC-CBJ ≼ FC-BJ ≼ FC ≼ BM-CBJ ≼ BMJ=BJ ≼ BM=BT
3. CPU time (average)
FC-CBJ ≼ FC-BJ ≼ FC ≼ BM-CBJ ≼ CBJ ≼ BMJ ≼ BJ ≼ BT ≼ BM
FC-CBJ apparently the champion
Problem Solving with Constraints
Intelligent Backtracking Algorithms
49
Additional developments
• Other backtracking algorithms exist:
– Graph-based backjumping (GBJ), etc.
– Pseudo-trees [Freuder 85]
[Dechter]
• Other look-ahead techniques exist
– DAC, MAC, etc.
• More empirical evaluations
– over randomly generated problems
• Theoretical comparisons
[Kondrak & van Beek IJCAI’95]
Problem Solving with Constraints
Intelligent Backtracking Algorithms
50
Implementing BT-based algorithms
• Preprocessing
– Enforce NC, do not include in #CC (e.g., Zebra)
– Normalize all constraints (fapp01-0200-0)
– Check for empty relations (bqwh-15-106-0_ext)
• Interrupt as soon as you detect domain wipe out
• Dynamic variable ordering
– Apply domino effect
Problem Solving with Constraints
Intelligent Backtracking Algorithms
51