Linearity - The University of Texas at Austin
advertisement

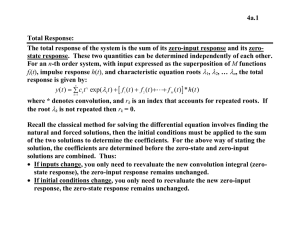
EE 313 Linear Systems and Signals Fall 2010 Differential Equations Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at Austin Initial conversion of content to PowerPoint by Dr. Wade C. Schwartzkopf Time-Domain Analysis • For a system governed by a linear constant coefficient differential equation, Total response zero - input response when x ( t ) 0 results from internal systemconditionsonly independent of x ( t ) x(t) y(t) zero - state response responseto non- zero x ( t ) all initialconditionsare zero dependent on x ( t ) Each component can be computed independently of other System satisfies linearity property if zero-input response is zero (i.e. all initial conditions are zero) Zero-state response is convolution of impulse response and input signal 5-2 Time-Domain Analysis • Zero-input response Response when x(t) = 0 Results from internal system conditions only Independent of x(t) For most filtering applications (e.g. your stereo system), we want a zero-valued zero-input response • Zero-state response Response to non-zero x(t) when system is relaxed A system in zero state cannot generate any response for zero input Zero state corresponds to initial conditions being zero 5-3 Zero-Input Response • Simplest case (first-order equation) d y0 t a1 y0 t 0 dt a1 t y t C e • Solution: 0 d y0 t a1 y0 t dt • For arbitrary constant C How is C determined? Could C be complex-valued? • How about the following Nth-order equation? dN d N 1 d yt a1 N 1 yt aN 1 yt aN y t x(t ) N dt dt dt 5-4 Zero-Input Response • For the Nth-order equation Guess solution has form y0(t) = C e t Substitute form into differential equation Factor common terms to obtain dy0 C e t dt 2 d y0 2 t C e 2 dt k d y0 k t C e k dt N N 1 t C a a a e 1 N 1N 0 non zero non zero Q y0(t) = C e t is a solution provided that Q() = 0 Factor Q() to obtain N characteristic roots Q( ) 1 2 N 0 5-5 Zero-Input Response • Assuming that no two i terms are equal y0 t C1e 1t C2 e 2t C N e N t • For repeated roots, solution changes Simplest case of root repeated twice: y0 t C1 C2 t e t With r repeated roots y0 t C1 C2t Cr t r 1 e t • Characteristic modes e t Determine zero-input response Influence zero-state response 5-6 Zero-Input Response • Could i be complex? If complex, we can write it in Cartesian form i i ji Exponential solution e t becomes product of two terms e it e i ji t e it e jit it e dampening term cosi t j sin i t oscillating term • For conjugate symmetric roots, and conjugate symmetric constants, i t i t 1 C1e C e 2 C1 e it cosi t C1 dampening term oscillating term 5-7 Zero-Input Solution Example L • Component values L = 1 H, R = 4 , C = 1/40 F Realistic breadboard components? x(t) R C y(t) • Loop equations (D2 + 4 D + 40) [y0(t)] = 0 • Characteristic polynomial Envelope 2 + 4 + 40 = ( + 2 - j 6)( + 2 + j 6) • Initial conditions y(0) = 2 A ý(0) = 16.78 A/s y0(t) = 4 e-2t cos(6t - p/3) A 5-8 Impulse Response • Response to unit impulse x(t) y(t) Set x(t) = d(t) and solve for y(t) • Linear constant coefficient differential equation dN d N 1 d y t a1 N 1 y t a N 1 y t a N y t N dt dt bN M dt dM d M 1 d x t b x t b xt bN xt N M 1 N 1 M M 1 dt dt dt • With zero initial conditions, impulse response is h(t ) b0 d (t ) v(t ) u(t ) v(t ) bN M dM d M 1 d y0 t bN M 1 M 1 y0 t bN 1 y0 t bN y0 t M dt dt dt b0 is coefficient of dNx(t)/dtN term and could be 0 5-9 Impulse Response • Where did b0 come from? • In solving these differential equations for t 0, x(t ) g (t ) u (t ) y (t ) m(t ) u (t ) • Funny things happen to y’(t) and y”(t) y ' (t ) m' (t ) u (t ) m(t ) d (t ) y" (t ) m" (t ) u (t ) 2 m' (t ) d (t ) m(t ) d ' (t ) • In differential equations class, solved for m(t) Likely ignored d(t) and d’(t) terms Solution for m(t) is really valid for t 0+ 5 - 10