Superposition Principle & the Method of Undetermined coefficients.

On Free Mechanical Vibrations
• As derived in section 4.1( following Newton’s 2nd law of motion and the Hooke’s law), the D.E. for the mass-spring oscillator is given by: my "
by '
ky
F e
( t ) , where m : is the mass attached to the spring k : is the Hooke' s constant (stiffness ) b : the is the damping coefficien t (friction)
F e
: all other external forces to the system.
y : is the displaceme nt from equilibriu m.
1
In the simplest case, when b = 0, and F e
= 0, i.e. Undamped, free vibration, we can rewrite the D.E:
• As y "
2 y
0 , where
k
, a general solution m is clearly : y ( t )
c
1 cos
t
c
2 sin
t . Which can also be written as : y ( t )
A sin(
t
.), with
A
c
1
2 c
2
2 and tan
c c
2
1 .
This is called Simple harmonic motion wit period
2
is known
, and frequency as the angular
2
. frequency.
h
2
When b
0, but F e
= 0, we have damping on free vibrations.
• The D. E. in this case is: my "
by '
ky
0 , and the auxiliary eq.
is mr
2 br
k
0 , the roots are easily seen as
b
2 m
1
2 m b
2
4 mk . The solution clearly depends on the discrimina nt b
2
4 mk .
We have three possible cases :
3
Case I: Underdamped Motion (b 2 < 4mk)
We let the
:
b
2 roots are m
and
i
2
1 m
. A general
4 mk
b
2 solution is
, hence y ( t )
e
t
( c
1 cos
t
This is a sinusoidal
c
2 sin
t ) or y ( t )
Ae
t sin(
t
wave with a damping factor Ae
t
.
).
4
Case II: Overdamped Motion (b 2 > 4mk)
• In this case, we have two distinct real roots, r
1
& r
2
Clearly both are negative, hence a general solution:
. y ( t ) y ' ( t )
c
1 e r
1 t
0
has c
2 e r
2 t at most
0 as t
.
Since one zero, it follows that the solution does not oscillate.
One local max
No local max or min
One local min
5
Case III: Critically Damped Motion (b 2 = 4mk)
• We have repeated root -b/2m. Thus the a general solution is: y ( t ) that
c
1 e
bt / 2 m lim y ( t )
0 c
2 te
bt as t
/ 2 m
.
Again we
, and see y ' ( t )
0 has at most one solution, its solutions behave similar to that of Overdamped motions.
6
Example
• The motion of a mass-spring system with damping is governed by y " ( t )
by ' ( t )
64 y ( t ) y ( 0 )
1 , and y ' ( 0 )
0
0 .
;
• This is exercise problem 4, p239.
• Find the equation of motion and sketch its graph for b = 10, 16, and 20.
7
Solution.
• 1. b = 10: we have m = 1, k = 64, and
• b 2 - 4mk = 100 - 4(64) = - 156, implies
= (39) 1/2 .
Thus the solution to the I.V.P. is y ( t )
e
5 t
(cos 39 t
5
39 sin 39 t )
8
39
e
5 t sin( 39 t
) , where tan
c
1 c
2
39
.
5
8
When b = 16 , b 2 - 4mk = 0 , we have repeated root -8 ,
• thus the solution to the I.V.P is y ( t )
( 1
8 t ) e
8 t y
1 t
9
When b = 20, b 2 - 4mk = 64, thus two distinct real roots are
• r
1
= - 4 and r
2
= -16, the solution to the I.V.P. is: y ( t )
4
3 e
4 t
1
3
e
16 t
.
The graph looks like : y
1
1 t
10
Next we consider forced vibrations
• with the following D. E.
(*) my "
We
assume by '
ky
that F
0
F
0
0 cos
,
t .
0 and
0
b
2
4 mk (i.e.
underdampe d).
Solution t y
y h o (*) can be written in the form
y p
, where y p stands for a particular solution t o (*), & y h is a genernal solution of the associated homogeneno us equation of (*).
11
We know a solution to the above equation has the form y
y h
y p
• where: y h
( t )
Ae
( b / 2 m ) t sin
4 mk
b
2
2 m t
, and by the method of undetermin ed coefficien ts, we know that y p
( t )
B
1 cos
t
B
2 sin
t ,
• In fact, we have
B
1
( k
F
0
( k m
2 m
)
2
2
) b
2
2
, B
2
( k
m
F
0 b
2
)
2 b
2
2
.
12
Thus in the case 0 < b 2 < 4mk
(underdamped), a general solution has the form: y ( t )
y h
( t )
y p
( t ) , where y h
( t )
Ae
( b / 2 m ) t sin
4 mk
b
2
2 m t
, and y p
( t )
( k
m
F
0
2
)
2 b
2
2 sin(
t
).
13
Remark on Transient and Steady-
State solutions.
14
Introduction
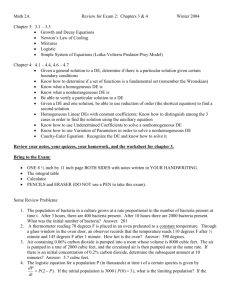
• Consider the following interconnected fluid tanks
6 L/min
A
X(t)
24 L
8 L/min
B
Y(t)
24 L
6 L/min
X(0)= a Y(0)= b
2 L/min
15
Suppose both tanks, each holding 24 liters of a brine solution, are interconnected by pipes as shown .
Fresh water flows into tank A at a rate of 6 L/min, and fluid is drained out of tank B at the same rate; also 8 L/min of fluid are pumped from tank A to tank
B, and 2 L/min from tank B to tank A. The liquids inside each tank are kept well stirred, so that each mixture is homogeneous. If initially tank A contains a kg of salt and tank B contains b kg of salt, determine the mass of salt in each tanks at any time t > 0.
16
Set up the differential equations
• For tank A, we have: dx dt
2
24 y ( t )
8
24 x ( t )
• and for tank B, we have dy dt
8
24 x ( t )
2
24 y ( t )
6
24 y ( t ).
17
This gives us a system of First
Order Equations x '
1
3 x
1
12 y , and y '
1
3 x
1
3 y .
This is equivalent to a
2nd order equation : since x
3 y '
y implies x '
3 y "
y ' , put them into first equation, we get
3 y "
2 y '
1
4 y
0 .
18
On the other hand, suppose
• We have the following 2nd order Initial Value
Problem: y " ( t )
3 y ' ( t )
2 y ( t )
0 ; y ( 0 )
1 , y ' ( 0 )
3
• Let us make substitutions: x t
1
y t and x t
2
( )
' ( ),
• Then the equation becomes:
19
A system of first order equations x
1
' ( )
x t
2
( ) x
2
' ( )
3
2
( )
2
1
( ), with the initial conditions become: x
1
0
1 , and x
2
0
3
• Thus a 2nd order equation is equivalent to a system of 1st order equations in two unknowns.
20
General Method of Solving System of equations: is the Elimination Method .
• Let us consider an example: solve the system x ' ( t )
3 x ( t )
4 y ( t )
1 , y ' ( t )
4 x ( t )
7 y ( t )
10 t .
21
• We want to solve these two equations simultaneously, i.e.
• find two functions x(t) and y(t) which will satisfy the given equations simultaneously
• There are many ways to solve such a system.
• One method is the following: let D = d/dt,
• then the system can be rewritten as:
22
(D - 3)[x] + 4y = 1, …..(*)
-4x + (D + 7)[y]= 10t .…(**)
• The expression
4(*) + (D - 3)(**) yields:
• {16 + (D - 3)(D + 7)}[y] = 4+(D - 3)(10t), or
(D 2 + 4D - 5)[y] =14 - 30t. This is just a 2nd order nonhomogeneous equation.
• The corresponding auxiliary equation is
• r 2 + 4r - 5 = 0, which has two solution r = -5, and r = 1, thus y h
= c
1 e -5t + c
2 e
• general solution is y = c
1 e -5t + c
2 t . And the e t + 6t + 2.
• To find x(t), we can use (**).
23
To find x(t), we solve the 2nd eq.
Y
(t) = 4x(t) - 7y(t)+ 10t for x(t),
• We obtain: x ( t )
1
4
{ y ' ( t )
7 y ( t )
10 t }
1
4
{[(
5 ) c
1 e
5 t c
2 e t
6 ]
7 [ c
1 e
5 t c
2 e t
6 t
2 ]
10 t }
1
2 c
1 e
5 t
2 c
2 e t
8 t
5 ,
24
Generalization
• Let
L
1
, L
2
, L
3
, and L
4 denote linear differential operators with constant coefficients, they are polynomials in D. We consider the 2x2 general system of equations:
L x
1
L
2
[ ]
f
1
, .........(1)
L x
3
L
4
[ ]
f
2
Since L L i j
L L j i
.........(2)
, we can solve the above equations by first eliminating the varible y. And solve it for x. Finally solve for y.
25
Example: x t
y t
x t
y t x t
y t
x t
t
2
.
1 ,
• Rewrite the system in operator form:
• (D 2 - 1)[x] + (D + 1)[y] = -1, .……..(3)
• (D - 1)[x] + D[y] = t 2 ……………...(4)
• To eliminate y, we use D(3) - (D + 1)(4) ;
• which yields:
• {D(D 2 - 1) - (D + 1)(D - 1)}[x] = -2t - t 2 . Or
• {(D(D 2 - 1) - (D 2 - 1)}[x] = -2t - t 2 . Or
• {(D - 1)(D 2 - 1)}[x] = -2t - t 2 .
26
The auxiliary equation for the corresponding homogeneous eq. is
(r - 1)(r 2 - 1) = 0
• Which implies r = 1, 1, -1. Hence the general solution to the homogeneous equation is
• x h
= c
1 e t + c
2 te t + c
3 e -t .
• Since g(t) = -2t - t 2 , we shall try a particular solution of the form :
• x p
= At 2 + Bt + C, we find A = -1, B = -4, C = -6,
• The general solution is x = x h
+ x p
.
27
To find y, note that (3) - (4) yields : (D 2 - D)[x] + y = -1 - t 2 .
• Which implies y = (D - D 2 )[x] -1 - t 2 .
28
Chapter 7: Laplace Transforms
• This is simply a mapping of functions to functions f f
L
• This is an integral operator .
F
F
29
More precisely
• Definition
: Let f(t) be a function on [0,
).
The Laplace transform of f is the function
F defined by the integral
(*) F ( s ) :
0
e st f ( t ) dt .
• The domain of F(s) is all values of s for which the integral (*) exists.
F is also denoted by L {f}.
30
Example
• 1. Consider f(t) = 1, for all t > 0. We have
F ( s )
0
e
st
( 1 ) dt
N lim
0
N e
st dt
N lim
e s
st this holds for all s
0
N
N lim
1 s
e
N t s
1 s
0 .
(Note on the domain of F(s).) The Laplace Transform is an improper integral.
31
Other examples,
• 2. Exponential function f(t) = e
t .
• 3. Sine and Cosine functions say: f(t) = sin ßt
,
• 4. Piecewise continuous (these are functions with finite number of jump discontinuities). f ( t ) t , 0
2 , 1
t
t
1 ,
2,
(t 2)
2
, 2
t
3 .
32
Example 4, P.375
• A function is piecewise continuous on [0,
), if it is piecewise continuous on [0,N] for any N > 0.
Determine the Laplace tranform of f ( t )
2 , 0
0 , 5 e
4 t
, 10
t t t .
5 ,
10 ,
33
Function of Exponential Order
• Definition
. A function f(t) is said to be of exponential order
if there exist positive constants M and T such that
(*) f ( t )
Me
t
, for all t
T .
• That is the function f(t) grows no faster than a function of the form Me
t
.
• For example: f(t) = e 3t cos 2t, is of order
= 3.
34
Existence Theorem of Laplace Transform .
• Theorem:
If f(t) is piecewise continuous on
[0,
) and of exponential order
, then L {f}(s) exists for all s >
.
• Proof.
We shall show that the improper integral converges for s >
. This can be seen easily, because [0,
) = [0, T]
[ T,
). We only need to show that integral exists on [ T,
).
35
A table of Laplace Transforms can be found on P. 380
• Remarks:
• 1.
Laplace Transform is a linear operator. i.e. If the Laplace transforms of f
1 and f
2 both exist for s >
, then we have
L {c
1 f
1
+ c
2 f
2
} = c
1
L {f any constants c
1 and c
2
1
} + c
2
.
L {f
2
} for
• 2.
Laplace Transform converts differentiation into multiplication by “s”.
36
Properties of Laplace Transform
• Recall :
L { f
Theorem
}( s )
: If L { f
0
e st
}( s )
f ( t ) dt .
F ( s ) exists for s
, then for all s
a , we have
(1) L { e at f ( t )}( s )
F ( s
a ) .
This means that L transform multiplica tion by e at
to translat ion (a shift) by a .
• Proof.
37
How about the derivative of f(t)?
Theorem : Let f ( t ) be continuous on [0,
) and f ' (t) be piecewise continuous exponentia on [0,
) , with both f and f l order
. Then for s
, we have
(2) L { f ' }( s )
sL { f }( s )
f ( 0 ) .
' of
Proof.
38
Generalization to Higher order derivatives.
Since f "
(f ')' , we see easily tha
L { f " }( s )
sL { s
f sL {
' }( f s )
}( s
)
f ' f
( 0 )
( 0 )
t f ' ( 0 )
s
2
L { f }( s )
sf ( 0 )
f ' ( 0 ) .
In general we have , by induction on n ,
L { f
( n )
}( s )
s n
L { f }( s )
s
( n
1 ) f ( 0 )
s
( n
2 ) f ' ( 0 )
f
( n
1 )
( 0 ).
39
Derivatives of the
Laplace Transform
Theorem : Suppose f ( t ) is piecewise continuous of exponentia l order
.
Let F(s)
on [0,
)
L{f}(s) , then for s
, we have L{t n f(t)}(s)
(
1 ) n d n
F
(s)
( ds n d n
1 ) n ds n
( L { f } (s) ).
Proof.
40
Some Examples.
• 1. e -2t sin 2t + e 3t t 2 .
• 2. t n .
• 3. t sin (bt).
41