1-BaySingleParameter
advertisement

Bayesian: Single Parameter
Prof. Nur Iriawan, PhD.
Statistika – FMIPA – ITS, SURABAYA
21 Februari 2006
Frequentist Vs Bayesian
(Casella dan Berger, 1987)
• Grup Frequentist
– Grup yang mendasarkan diri pada cara klasik: MLE,
Moment, UMVUE, MSE, dll
– Pendekatan analitis selalu sebagai solusi
• Grup Bayesian
– Grup yang mendasarkan diri pada cara Bayesian
– Pendekatan numerik serta komputasi secara intensif
– Inference lebih didasarkan pada kemungkinan
muncul terbesar
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
2
Teorema Bayes
(Thomas Bayes, 1702-1761)
P( A | Ei ) P( Ei )
P( Ei | A)
P( A)
k
P( A) P( A | Ei ) P( Ei )
i 1
konstan
P( Ei | A) P( A | Ei ) P( Ei )
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
3
Model Bayesian
(Box dan Tiao, 1973), (Zellner, 1971), (Gelman, Stern, Carlin, dan Rubin, 1995)
Mengacu pada bentuk proporsional
P( Ei | A) P( A | Ei ) P( Ei )
Yang dibentuk sebagai
Posterior Likelihood*Prior
Bahwa data yang dibentuk sebagai likelihood digunakan
sebagai bahan untuk meng-update informasi prior menjadi
sebuah informasi posterior yang siap untuk digunakan
sebagai bahan inferensi.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
4
Bayesian: Parameter juga
diperlakukan sebagai variabel
• Dalam Bayesian semua parameter dalam
model diperlakukan sebagai variabel
• Prinsip berfikir sebagai bentuk Full
Conditional Distribution digunakan untuk
mempelajari karakteristik setiap parameter
• Dibedakan antara simbol penyajian
likelihood data dan Full Conditional
Distribution.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
5
Motivasi Bayesian
• Theorema Bayes
– Thomas Bayes
P( B | A) P( A)
P( A | B)
P( B)
P(B) adalah konstan
– Pada bentuk lain jika x1 , x2 ,..., xn adalah suatu r.v yang
independen dengan θ adalah parameternya, maka
p( , x1 , x2 ,..., xn )
p ( | x1 , x2 ,..., xn )
p ( x1 , x2 ,..., xn )
p( ) p( x1 , x2 ,..., xn | )
p ( ) p( x1 , x2 ,..., xn | )d
p ( ) p( x1 , x2 ,..., xn | )
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
6
Example: the Icy Road Case
Ice: Is there an icy road?
•Values {Yes, No}
•Initial Probabilities (.7, .3)
Watson: Does Watson have a car crash?
•Values {Yes, No}
•Probabilities (.8, .2) if Ice=Yes, (.1, .9) if Ice=No.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
7
Icy Road: Conditional Probabilities
Ice
Watson
Yes
No
Yes
.8
.2
No
.1
.9
p(Watson=yes|Ice=yes)
Nur Iriawan
p(Watson=no|ice=yes)
Bayesian Modeling, PENS – ITS - 2006
8
Icy Road: Likelihoods
Note: 8/1 ratio
Ice
Watson
Yes
No
Yes
.8
.2
p(Watson=yes|Ice=yes)
No
.1
.9
p(Watson=yes|Ice=no)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
9
Icy Road: Bayes Theorem:
If Watson = yes -- Before Normalizing
Prior
Ice
Yes
No
* Likelihood
Ice
Watson
Yes
No
.7
Yes
.8
.2
.3
No
.1
.9
Posterior
Ice Yes
.56
Yes
No .03
Sum = .59. Need to divide through by this
‘normalizing constant’ to get probabilities.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
10
Icy Road: Bayes Theorem:
If Watson = yes
Prior
Ice
Yes
No
* Likelihood
Ice
Watson
Yes
No
.7
Yes
.8
.2
.3
No
.1
.9
Posterior
Ice Yes
Ice Yes
.56
Yes .95
Yes
No .03
No .05
Posterior probabilities -- each term in the product
divided through by the normalizing constant .59.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
11
Contoh pada kasus Normal
• Representasi alami suatu distribusi
– Normal(μ,σ2) atau N(μ,σ2)
2
1
1
x
2
f ( x | , )
exp
2
2
1 x 2
1
f ( x)
exp
2
2
1 x 2
f ( x) exp
2
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
Mana
representasi
yang
representatif ?
12
• Apa perbedaan antara penyajian berikut
ini?
1
1 x
2
f ( x | , )
exp
2
2
2
2
1
1 x
2
f ( | , x)
exp
2
2
2
1
1
x
2
f ( | , x)
exp
2
2
2
1
1
x
2
f ( , | x)
exp
2
2
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
13
Plot variabel x, μ dan σ dalam full
conditional Normal
μ
x
σ
Nur Iriawan
σ
Bayesian Modeling, PENS – ITS - 2006
μ
14
Interval vs Highest Posterior
Density (HPD)
(Box dan Tiao, 1973),(Gelman et.al, 1995), (Iriawan, 2001)
• Pembentukan interval konfidensi pada
frequentist adalah sbb
s
s
P x k
x k
1
n
n
• Pembentukan interval konfidensi pada
Bayesian didekati dengan HPD.
P ( a b) 1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
15
Representasi Kesamaan Densitas
(Iriawan, 2001)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
16
Compromise dalam Control Chart
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
17
HPD pada Control Chart Individu
Peta Kendali
Nur Iriawan
(1-)
x
100%
Batas
Batas
Kendali Kendali
Bawah Atas
95,0
71,3953 109,481
97,5
64,4857 110,915
99,0
55,3356 112,775
Bayesian Modeling, PENS – ITS - 2006
18
Contoh Kasus pada Bernoulli
• Seperti halnya pada Normal sebelumnya, x~Ber(x;p)
disajikan sbb:
P( x | p) p(1 p)
dimana pada frequentist, p dianggap konstan
• Bagaimana jika karena situasi dan tempat
pengamatan yang berbeda dan diperoleh p berubahubah? Prinsip Bayesian, p akan diperlakukan menjadi
sebuah variabel agar mempunyai kemampuan
akomodatif pada keadaan seperti di atas.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
19
• Anggap p berubah sesuai dengan distribusi
Beta(α,β), seperti berikut:
1
1
1
f p,
p 1 p
B ,
dengan
B , p
1
0
1
1 p
1
dp
1
1
f p,
p 1 p
• apa yang akan terjadi?
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
20
• Anggap satu pengamatan bernoulli telah
dilakukan, maka posterior distribusinya
adalah sbb:
p 1 p
1 x
x
p x
1
0
p x 1 p
1 x
1
1
p 1 p
1
1
p 1 p dp
1 p
1
x
x 1
0 p 1 p dp
p
Nur Iriawan
x 1
x
Bayesian Modeling, PENS – ITS - 2006
21
• Sesuai dengan spesifikasi fungsi Beta,
maka penyebut dapat diproses sbb:
1
0
p
x 1
1 p
x
1
dp p
0
* 1
1 p
* 1
dp
where * x and * x 1
x x 1
1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
22
• Sehingga distribusi posterior untuk p
setelah satu observasi tersebut adalah
1
x
x 1
1 p
p x
p
x x 1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
23
Estimator Bayes
• Bayesian estimate dari p dapat diperoleh dengan
meminimumkan loss function. Beberapa loss functions
dapat digunakan, tetapi disini akan digunakan quadratic
loss function yang konsisten dengan mean square errors
(MSE)
2
ˆ
Pˆ P 2
min
E
Pˆ
E P P
2 E Pˆ P 0
ˆ
P
Pˆ E[ P]
• Secara umum, estimasi θ dengan pendekatan Bayes
sbb ((Carlin and Louis, 1996), and (Elfessi and Reineke, 2001)) :
ˆ E[ | x ,..., x ]
1
n
( ) p( x | )d
( ) p( x | )d
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
24
• Dengan memperlakukan expektasi pada
posterior distribution diperoleh
1
x
x
E p
p 1 P dp
0 x x 1
1
1
x
x
p 1 p dp
0
x x 1
1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
25
• Seperti sebelumnya, diselesaikan integral
tersebut dengan membuat variabel baru
*=+x+1 dan *=-x+1. Integralnya akan
memberikan hasil sbb:
1
0
p
1
*
1 p
*
*
*
x 1 x 1
1
dp
*
*
2
1 x 1 x 1
E p
2 x x 1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
26
– Dengan menggunakan penyederhanaan seperti berikut
1
– Maka,
1 x 1
1
x x
1 1 x
2 x
x
1
– Atau
E[ P]
Nur Iriawan
x
1
Ingat hasil ini kembali pada saat
pembahaan Compromising Bayesian
dengan Classical Approaches
Bayesian Modeling, PENS – ITS - 2006
27
•
Pengembangan hasil ini ke bentuk n buah percobaan Bernoulli akan
menghasilkan sebanyak y sukses memberikan hasil
n
y n 1
y 1
1 p
p y
p
y y n
•
Dimana y adalah jumlah sukses dari observasi setiap bernoulli x. Nilai
taksiran y adalah sebagai berikut:
Y
ˆ
P
n
Nur Iriawan
Ingat hasil ini kembali pada saat
pembahaan Compromising Bayesian
dengan Classical Approaches
Bayesian Modeling, PENS – ITS - 2006
28
Prior dan Metode Bayesian
(Gelman et.al, 1995)
Karena parameter diperlakukan sebagai variabel maka dalam
Bayesian akan mempunyai nilai dalam domain , dengan
densitas f (). Dan densitas inilah yang akan dinamakan sebagai
distribusi prior dari .
Dengan adanya informasi prior yang dipadukan dengan data /
informasi saat itu, X, yang digunakan dalam membentuk posterior
, maka penghitungan posteriornya akan semakin mudah, yaitu
hanya dengan menghitung densitas bersyarat dari diberikan oleh
X=x .
Kritikan pada Bayesian biasanya terfokus pada “legitimacy dan
desirability” untuk menggunakan sebagai random variabel dan
ketepatan mendefinisikan/memilih distribusi prior-nya.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
29
Bentuk Prior, Likelihood, dan Posterior
yang ideal
Likelihood
Proper/
conjugate
Posterior
Prior
θ
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
30
Bagaimana jika pemilihan priornya
seperti berikut ini?
Pemilihan prior seperti ini akan
Merupakan sebuah misleading prior,
Sehingga posteriornya tidak akan
Jelas bentuknya.
Likelihood
Posterior
Prior
θ
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
31
Prior yang serba sama densitasnya
di semua domain
Likelihood
improper
posterior
prior
θ
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
32
Interpretasi distribusi Prior
1. Sebagai bentuk distribusi frequency
2. Sebagai bentuk representasi normatif dan
objectif pada suatu parameter yang lebih
rasional untuk dipercayai
3. Sebagai suatu representasi subjectifitas
seseorang dalam memandang sebuah
parameter menurut penilainnya sendiri
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
33
Prior sebagai representasi
Frequensi Distribusi
• Adakalanya nilai suatu parameter dibangkitkan
dari modus pola data sebelumnya baik itu dari
pola simetri ataupun tidak simetri
• Dalam sebuah inspeksi dalam proses industri, data
kerusakan pada batch sebelumnya biasanya akan
digunakan sebagai estimasi informasi prior untuk
keadaan batch selanjutnya
• Prior biasanya mempunyai arti fisik sesuai dengan
frequensi kejadian data-datanya
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
34
Interpretasi Normative/Objective
dari suatu prior
• Permasalahan pokok agar prior dapat interpretatif
adalah bagaimana memilih distribusi prior untuk suatu
parameter yang tidak diketahui namun sesuai dengan
permasalahan fisik yang ada.
• Jika hanya mempunyai nilai-nilai pada range yang
tertentu saja, hal ini cukup beralasan jika digunakan
prior yang mempunyai densitas serba sama (equally
likelly / uniformly distributed). Interpretasinya adalah
bahwa setiap kondisi diberi kesempatan yang sama
untuk dapat terpilih sebagai suporter likelihood dalam
membentuk posteriornya.
• Prior dapat mempunyai arti yang sangat janggal jika
salah dalam pemilihannya
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
35
Kasus prior dalam Continuous
Parameters
• Invariance arguments.
– Hal ini akan dapat terjadi, sebagai contoh dalam kasus
Normal mean , dapat diartikan bahwa semua titik dalam
semua interval (a,a+h) harus mempunyai probabilitas prior
untuk semua h dan a yang diketahui. Hal ini akan
memberikan pengertian bahwa untuk semua titik dalam
interval tersebut mempunyai kesempatan sama terpilih atau
cenderung mempunyai uniform prior (“improper prior”)
– Untuk parameter, , dalam interval (a,ka) akan mempunyai
prior probabilitas yang sama, yang hal ini akan memberikan
arti bahwa priornya akan proportional pada nilai 1/ .Lagi-lagi
hal ini juga menghasilkan sebuah improper prior.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
36
Macam-macam Prior
• Conjugate prior vs non-conjugate prior ((Box dan Tiao,
1973),(Gelman et.al, 1995), (Tanner, 1996), (Zellner, 1971))
– Prior terkait dengan pola model likelihood datanya
• Proper prior vs Improper prior (Jeffreys prior)
– Prior terkait pada pemberian pembobotan/ densitas di setiap
titik, uniformly distributed atau tidak
• Informative prior vs Non-Informative prior
– Prior terkait dengan sudah diketahui pola/frekuensi distribusi dari
datanya atau belum
• Pseudo-prior (Carlin dan Chib, 1995)
– Prior terkait dengan pemberian nilainya yang disetarakan
dengan hasil elaborasi dari frequentist (misal regresi dengan
OLS)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
37
Continuous Parameters
• Biasanya digunakan uniform prior (at least if the
parameter space is of finite extent)
• Tetapi jika adalah uniform, maka suatu bentuk fungsi
non-linear dari , g(), tidak akan uniform
• Contoh jika p()=1, >0. Re-parameterisasi sebagai
maka:
dimana
sehingga:
• “ignorance about ” does not imply “ignorance about
g.” The notion of prior “ignorance” may be untenable
(mungkin dapat diperbolehkan)?
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
38
• Turning this process around slightly,
Bayesian analysis assumes that we can
make some kind of probability statement
about parameters before we start. The
sample is then used to update our prior
distribution.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
39
– Pertama, anggap bahwa prior yang
digunakan dapat direpresentasikan sebagai
probability density function () dengan
adalah parameter yang akan dipelajari.
– Berdasarkan pada sampel X (likelihood
function) kita akan dapat meng-update
distribusi priornya mengguankan Bayes rule
X
L X
LX d
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
40
Beberapa Conjugate priors
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
41
The Jeffreys Prior
(single parameter)
• Jeffreys prior diberikan sebagai berikut:
dimana
adalah expected Fisher Information
• This is invariant to transformation in the sense that all
parametrizations lead to the same prior
• Can also argue that it is uniform for a parametrization
where the likelihood is completely determined (see Box
and Tiao, 1973, Section 1.3)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
42
Contoh Jeffreys pada Binomial
Hasil ini adalah suatu bentuk distribusi beta dengan parameters ½ and ½
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
43
Contoh Jeffreys’ Priors yang lain
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
44
Improper Priors
Trouble Posterior (sometimes)
• Suppose Y1, .,Yn are independently normally distributed
with constant variance 2 and with:
• Suppose it is known that r is in [0,1], r is uniform on [0,1],
and g, , and have improper priors
• Then for any observations y, the marginal posterior
density of r is proportional to
where h is bounded and has no zeroes in [0,1]. This
posterior is an improper distribution on [0,1]!
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
45
Improper prior usually proper posterior
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
46
Contoh lain: improper proper
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
47
Subjective Degrees of Belief
• Probability represents a subjective degree of belief held
by a particular person at a particular time
• Various techniques for eliciting subjective priors. For
example, Good’s device of imaginary results.
• e.g. binomial experiment. beta prior with a=b. “Imagine”
the experiment yields 1 tail and n-1 heads. How large
should n be in order that we would just give odds of 2 to
1 in favor of a head occurring next? (eg n = 4 implies
a=b=1)
Y
ˆ
P
n
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
48
Problems with Subjectivity
• What if the prior and the likelihood disagree
substantially?
• The subjective prior cannot be “wrong” but
may be based on a misconception
• The model may be substantially wrong
• Often use hierarchical models in practice:
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
49
Hierarchical Model
• Contoh pada kasus Binomial
Gamma(c, d)
Gamma(e, f)
Poisson(λ)
Gamma(g, h)
Beta(a, b)
Binomial(n, p)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
50
General Comments
• Determination of subjective priors is
difficult
• Difficult to assess the usefulness of a
subjective posterior
• Don’t be misled by the term of “subjective”;
all data analyses involve appreciable
personal elements
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
51
Once again:
An example with a continuous variable: A betabinomial example
• The setup: We are flipping a biased coin, where the
probability of heads could be anywhere between 0 and
1. We are interested in .We will have two sources of
information:
– Prior beliefs, which we will express as a beta
distribution, and
– Data, which will come in the form of counts of heads
in 10 independent flips.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
52
An example with a continuous variable:
A beta-binomial example--the Prior Distribution
• The prior distribution:
Let’s suppose we think it is more likely that the coin is close to
fair, so is probably nearer to .5 than it is to either 0 or 1. We
don’t have any reason to think it is biased toward either heads
or tails, so we’ll want a prior distribution that is symmetric
around .5. We’re not real sure about what might be--say
about as sure as only 6 observations. This corresponds to 3
pseudo-counts of H and 3 of T, which, if we want to use a beta
distribution to express this belief, corresponds to beta(4,4):
b11[1] sample: 50000
3.0
2.0
1.0
0.0
0.0
Nur Iriawan
0.25
0.5
0.75
Bayesian Modeling, PENS – ITS - 2006
53
An example with a continuous variable:
A beta-binomial example--the Prior Distribution
•
Beta. Defined on [0,1]. Conjugate prior
for the probability parameter in Bernoulli &
binomial models.
PseudoCount
of successes
~ dbeta(4,4)
PseudoCount
The variable:
Mean(): 4 .5
44
Variance():
“success probability”
44
4 42 4 4 1
4 1
Mode():
.5
442
of failures
p 4,4 41 1 41
.028
The failure
probability
Shape, or
“prior sample info”
The success
probability
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
54
An example with a continuous variable:
A beta-binomial example--the Likelihood
• The likelihood:
Next we will flip the coin ten times. Assuming the same true (but
unknown to us) value of is in effect for each of ten independent
trials, we can use the binomial distribution to model the probability
of getting any number of heads: i.e.,
The variable
Count of observed successes
pr ,10 r 1 10r
Count of observed
failures
The “success probability” parameter
The failure probability
The success probability
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
55
An example with a continuous variable:
A beta-binomial example--the Likelihood
• The likelihood:
We flip the coin ten times, and observe 7 heads; i.e., r=7. The
likelihood is obtained now using the same form as in the preceding
slide, except now r is fixed at 7 and we are interested in the relative
value of this function at different possible values of :
p7 ,10 7 1 3
likelihood[1] sample: 100000
3.0
2.0
1.0
0.0
0.0
Nur Iriawan
0.25
0.5
0.75
1.0
Bayesian Modeling, PENS – ITS - 2006
56
An example with a continuous variable:
Obtaining the posterior by Bayes Theorem
posterior
likelihood
prior
General form:
p( y | x* ) p( x* | y)
In our example, 7 plays the
role of x*, and p plays the
role of y. Before normalizing:
p r 7 7 1 3 3 1 3
After normalizing:
p( y )
1 1
p r 7
z 1 z z 1 z z
7
3
7
3
3
3
3
3
z
Now, how can we get an idea of what this means we believe about
after combining our prior belief and our observations?
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
57
An example with a continuous variable:
In pictures
b11[1] sample: 50000
3.0
Prior
2.0
1.0
0.0
0.0
x
0.25
0.5
0.75
likelihood[1] sample: 100000
3.0
Likelihood
2.0
1.0
0.0
0.0
0.25
0.5
0.75
1.0
p sample: 50000
Posterior
4.0
3.0
2.0
1.0
0.0
0.0
Nur Iriawan
0.2
0.4
0.6
Bayesian Modeling, PENS – ITS - 2006
0.8
58
An example with a continuous variable:
Using the fact that we have conjugate distributions
Now
p r 7 7 1 3 3 1 3 10 1 6 .
This is just the kernel of a beta(11,7) distribution. This is rather
special. The data were observed in accordance with a probability
function which would have that same mathematical form as a
likelihood once data are observed. We chose a prior distribution (in
this case, a beta distribution) which would combine with the likelihood
just so as to produce another distribution in the same parametric family
(another beta distribution), just with updated parameters. We can work
out its summary statistics:
Mean():
prior was
Nur Iriawan
11
.61
11 7
.5
Variance():
11 7
11 7 11 7 1
2
11 1
.625
11 7 2
.013 Mode():
.028
Bayesian Modeling, PENS – ITS - 2006
.5
59
An example with a continuous variable:
Using BUGS
Now
p r 7 7 1 3 3 1 3 10 1 6 .
What BUGS does in this simple problem with one variable is to sample
lots of values from the posterior distribution for ; that is, its distribution
as determined first with information from the prior, but further
conditional on the observed data.
Here are the summary statistics from 50000 draws:
Mean():
prior was
Nur Iriawan
11
.61
11 7
.5
Variance():
11 7
11 7 11 7 1
2
11 1
.625
11 7 2
.013 Mode():
.028
Bayesian Modeling, PENS – ITS - 2006
.11162~.0125
.5
60
An example with a continuous variable:
Using BUGS
• BUGS setup for this problem:
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
61
Looking ahead to sampling-based
approaches with many variables
• BUGS = Bayesian-inference Using Gibbs Sampling
• Basic idea: Model multi-parameter problem in terms
of assemblies of distributions and functions for all
data and all parameters (taking advantage of
conditional dependence whenever possible).
– E.g., p(Data|x,y) p(x|z) p(y) p(z). (*)
• Observe Data*; Posterior p(x,y,z|Data*) is
proportional to (*). Hard to evaluate normalizing
constant, but ...
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
62
Looking ahead to sampling-based
approaches with many variables
• Can draw values from “full conditional” distributions:
• Start with a possible value for each variable in cycle 0.
• In cycle t+1,
– Draw xt+1 from p(x|Y= yt,Z= zt,Data*)
– Draw yt+1 from p(y|X= xt+1,Z= zt,Data*)
– Draw zt+1 from p(z|X= xt+1,Y= yt+1,Data*)
• Under suitable conditions, these series of draws will
come to approximate draws from the actual true joint
posterior for all the parameters.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
63
Inference in a chain
Recursive representation:
p(u,v,x,y,z) = p(z|y,x,v,u) p(y|x,v,u) p(x|v,u) p(v|u) p(u)
= p(z|y)
U
V
p(v|u)
Nur Iriawan
p(y|x)
X
p(x|v)
p(x|v)
p(v|u) p(u).
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
64
Inference in a chain
Suppose we learn the value of X:
Start here, by
revising belief
about X
U
V
p(v|u)
Nur Iriawan
X
p(x|v)
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
65
Inference in a chain
Propagate information down the chain using
conditional probabilities:
From updated belief
about X, use conditional
probability to revise
belief about Y
U
V
p(v|u)
Nur Iriawan
X
p(x|v)
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
66
Inference in a chain
Propagate information down the chain using
conditional probabilities:
From updated belief
about Y, use conditional
probability to revise
belief about Z
U
V
p(v|u)
Nur Iriawan
X
p(x|v)
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
67
Inference in a chain
Propagate information up the chain using
Bayes Theorem:
From updated belief
about X, use Bayes
Theorem to revise belief
about V
U
V
p(v|u)
Nur Iriawan
X
p(x|v)
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
68
Inference in a chain
Propagate information up the chain using
Bayes Theorem:
From updated belief
about V, use Bayes
Theorem to revise belief
about U
U
V
p(v|u)
Nur Iriawan
X
p(x|v)
Y
p(y|x)
Bayesian Modeling, PENS – ITS - 2006
Z
p(z|y)
69
Inference in singly-connected
nets
Singly connected: There is
never more than one path
from one variable to
another variable. Chains
and trees are singly
connected. Can use
repeated applications of
Bayes theorem and
conditional probability to
propagate evidence.
(Pearl, early 1980s)
Nur Iriawan
V
U
Bayesian Modeling, PENS – ITS - 2006
X
Y
Z
70
Posterior Summaries
• Mean, median, mode, percentile, etc.
• Central 95% interval versus highest
posterior density region (normal mixture
example…)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
71
Bayesian Confidence Intervals
• Apart from providing an alternative
procedure for estimation, the Bayesian
approach provides a direct procedure for
the formulation of parameter confidence
intervals.
• Returning to the simple case of a single
coin toss, the probability density function
of the estimator becomes:
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
72
1
X
X 1
1 P
P X
P
X X 1
• As previously discussed, try to give ==1.4968,
the Bayesian estimator of P is .6252.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
73
• However, using the posterior distribution
function, we can also compute the probability
that the value of p is less than .5 given a head:
PP .5
.5
0
1
X
P X 1 1 P dP .2976
X X 1
• Please verify this result!
• Hence, we have a very formal statement of
confidence intervals as P(0.3 < p < 0.7).
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
74
Prediction
“Posterior Predictive Density” of a future observation
binomial example, n=20, x=12, a=1, b=1 y
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
~
y
75
Prediction for Univariate Normal
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
76
Prediction for Univariate Normal
•Posterior Predictive Distribution is Normal
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
77
Prediction for a Poisson
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
78
On the Compromise of Bayesian
to Classical Estimation
(presented on South-East Asia Stat & Math Muslim Society Conference)
Nur Iriawan
Statistics Department of Institut Teknologi Sepuluh Nopember
Jl. Arief Rahman Hakim Sukolilo, Surabaya 60111, Indonesia
iriawann@sby.centrin.net.id
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
79
Example on Exponential
Suppose x is exponentially distributed
f ( x, ) exp( x), x 0, 0.
The MLE of
is
n xi
i 1
n
Nur Iriawan
1
Bayesian Modeling, PENS – ITS - 2006
80
Using Bayesian approach with prior of
is
( ) 1 exp( ), 0, 0, and .
The likelihood would be
n
n 1
( | x1 ,..., xn )
exp xi
i 1
Then the posterior of
given the data X is
n
n 1
( | x1 ,..., xn )
exp xi
i 1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
81
The Bayes estimator for can be derived using
ˆ E[ | x1 ,..., xn ]
n
n 1
xi d
0 exp
i 1
n
n 1
xi d
0 exp
i 1
n
n
xi
i 1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
82
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
83
Numerical Calculation
One thousand generated data from Exponential distribution, then
The classical MLE give the result (using MINITAB) as follows
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
84
Using WinBUGS, the Bayes estimator is
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
85
Lihat kembali hasil dari Binomial
Estimator Bayes diperoleh
Y
Pˆ
n
Y
Pˆ
n
Bagaimana jika α = β = 0? Estimator Bayes akan menjadi sama
dengan cara klasik. Demikian halnya jika nilai-nilai ini diterapkan
pada prior beta, maka prior tersebut akan berubah menjadi sebuah
Jeffreys’ prior.
1
1
f p,
p 1 p
Cara klasik memberikan hasil bahwa
jika 0 dan 0, maka
f p,
0
1
p 1 1 p
0 0
p 1 1 p
1
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
86
Summary
The Bayesian estimator reported as the posterior mean
which is used here is generated from an improper prior
distribution. It has been shown that when there is no
information about the prior of the parameter of model,
a constant or Jeffreys’ prior is used, the resulting
estimator will give a compromise result between
Bayesian and Classical estimator.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
87
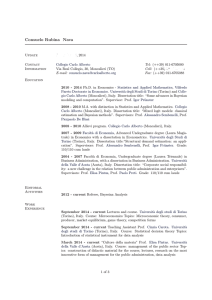
Numerical Integration: Monte Carlo Method
(Low dan Kelton, 2000)
• Anggap kita akan menghitung integral berikut
b
I g ( x)dx
a
• Jika g(x) cukup kompleks maka nilai I akan
cukup rumit. Dengan cara numerik seperti
beriktu dapat diperoleh nilai I dengan cukup
sederhana.
• Caranya adalah sbb:
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
88
• Buat random variabel baru Y (b a) g ( x)
dengan x bernilai uniform dalam interval (a,b),
atau U(a,b).
• Hitung ekspektasi Y dengan cara berikut
E[Y ] E[(b a ) g ( x)]
(b a ) E[ g ( x)]
b
(b a ) g ( x) f x ( x)dx
a
(b a )
b
a
g ( x)dx
(b a )
I
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
89
• Diketahui bahwa E[Y ] Y (n)
• Sehingga nilai integral I dapat didekati secara
numerik oleh
n
n
Y ( n)
Y
i
i
n
(b a)
g(x )
i
i
n
• Berarti, bangkitkan data x1 , x2 ,..., xn yang
mempunyai distribusi Uniform dan masukkan
nilainya ke fungsi g(x) jumlahkan nilainya dan
hitung rata-ratanya sebagai taksiran nilai integral
yang sedang dicari.
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
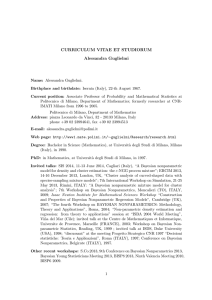
90
• Berapa banyak data yang harus dibangkitkan?
• Data harus dibangkitkan sebanyak mungkin sampai nilai
rata-ratanya mencapai titik konvergen.
16
14
12
Rata-rata
10
8
6
4
2
0
1
8
15
22
29
36
43
50
57
64
71
78
85
92
99
Iterasi
Burn-in
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
91
Cara lain menghitung nilai estimasi
integral dengan RNG
• Macam Random Number Generator
(RNG)
– Transformasi Invers
– Composisition
– Convolution
– Acceptance Rejection (AR)
– Adaptive Acceptence Rejection (AAR)
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
92
Transformasi Invers
• Syarat Transformasi Invers
– Fungsi mempunyai CDF yang close form
• Metodenya adalah sbb:
F(x)
1
F ( x) 1 exp( x)
u 1 exp( x)
1 u exp( x)
u
x
0
Nur Iriawan
x
Bayesian Modeling, PENS – ITS - 2006
1
1
ln(1 u )
ln(u )
93
Composition (Mixture form)
• Perhatikan bentuk fungsi berikut
f(x)
Half Normal
I
II
Exponential
f ( x) k1 f1 ( x) I ( ,0] k2 f 2 ( x ) I[0, )
Dimana data di daerah I dibangkitkan dengan Normal dan
di daerah II dengan Exponential
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
94
Convolution
• Misalkan sebuah fungsi Erlang(m ),
maka cara pembangkitan datanya adalah
dengan mengkonvolusikan data bangkitan
Exponential( ).
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
95
Acceptance Rejection (AR)
• Sangat bagus untuk fungsi yang tidak jelas pdf atau bukan
• Dapat mengakomodasikan fungsi yang tidak mempunyai CDF close
form
• Caranya adalah sbb:
tx
f(x)
rx
Nur Iriawan
Reject
Accept
Bayesian Modeling, PENS – ITS - 2006
96
Algoritma AR
• Bangkitkan x ~ rx
• Bangkitkan u ~ U(0,1)
f ( x)
• If
u then
t ( x)
Accept x
Else
Reject x
Nur Iriawan
Bayesian Modeling, PENS – ITS - 2006
97