V p
advertisement

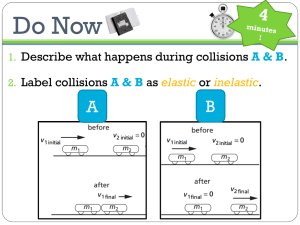
Conservation of Energy and Momentum Elastic Collisions Inelastic Collisions Collisions in 2 or 3 Dimensions 7.4 Conservation of Energy and Momentum in Collisions In the previous lecture we found that external forces acting on a system change the system momentum Fext=P/t, remember, bold font means vector and that system momentum is conserved if no external forces act on a system Pf = Pi if Fext=0. The relationship between force and momentum led us to define impulse as J = Fnet t. Impulse “explains” how objects or systems gain momentum. Now we have the tools to handle collisions between objects and systems. A bat hitting a ball and a person jumping and striking the ground are examples of collisions. During the collision, squishy objects are deformed and forces are complex. This is not an easy problem to solve. Another example of a complex collision is two cars colliding, deforming, and skidding. In the case of a bat hitting a ball, the ball is deformed by the force of the bat, and its momentum changed dramatically. Let’s look at the ball/bat collision more closely. Before the collision, the ball moves under the influence of gravity and air resistance. The force due to air resistance depends on velocity, and so is time dependent, but over small time periods, the force due to air resistance changes little. Let’s graph these forces. force The impulse delivered to the ball (change in momentum) during a time t is the area under the F vs time curve. Fgrav Fair t time When the ball is hit by the bat, contact time t is small, and the force of the bat on the ball is huge compared to the forces due to gravity and the air. Fbat The impulse delivered to the ball by the bat is typically many hundreds force or thousands of times greater than the impulse delivered by gravity and the air. Under these conditions, we can ignore Jgrav and Jair and keep only Jbat. Fgrav Fair t time Now, back to our OSE’s: Fext=P/t, Pf = Pi if Fext=0, J = Fnet t. We can combine these into one “master equation” which describes the change in system momentum during some process: OSE: Jext = Pf – Pi . Jext (also called Jexternal, or Jnet, or Jnet, external) is the impulse delivered to the system by all forces outside the system under consideration. What about internal forces, inside the system? By Newton’s third law, every internal force is part of an actionreaction pair. 1 F12 F21 2 F12=-F21 so F12t=-F21t so J12=-J21. The net impulse delivered by this pair of forces is J12+J21=0. Internal forces do not change the system momentum. The particles may be gyrating wildly around each other, but the system momentum remains constant. Demonstration: trust in physics, part II. The friction force, acting over a very short time t, provided no (or very little impulse) to the objects of the demonstration. Back to collisions. “During the collision, squishy objects are deformed by internal forces* and the internal forces are complex. This is not an easy problem to solve.” BUT if collisions happen fast enough, external forces (such as friction) have little time to develop significant impulse. In that case, Jext 0, and Pi = Pf (approximately). *Here I’ve added the words in orange to the sentence on slide 2. Internal forces are those between objects involved in the collision—not forces due to outside objects. We can finally write our comprehensive, all-inclusive form of the Law of Conservation of Momentum: OSE: Fext = 0 Jext = 0 Pf = Pi . This OSE says that if the net external force is zero, then the net external impulse is zero, and system momentum is exactly conserved. It also says that if for some reason the net external impulse can be approximated by zero, then system momentum is approximately conserved (and the approximation may be extremely accurate). On exams or tests, I suggest you use Jext 0 = Pf – Pi . Ask yourself if you are justified in “zeroing out” Jext. If the answer is yes, do it! To be safe, somewhere in your solution you might want to make a note why you zeroed out Jext. I may not demand a reason for zeroing out Jext as part of your solution. But don’t zero out Jext unless it is justified! This section—less than a page in your text—took many slides. We are not done with it, either! It may be that kinetic energy is conserved in a collision. In that case, the collision is “elastic.” You can use Kf = Ki any time you know a collision is elastic. Kf = Ki does not appear on your OSE sheet. It is actually the definition of an elastic collision. Perhaps you should write that on your next 3x5 card. “So when can I assume a collision is elastic.” Never! (Almost.) (The key word is “assume.”) If the colliding objects are rigid, do not stick together, do not expend energy deforming, and no energy is lost to heat or sound in the collision, then “elastic” is a good approximation. Examples of elastic collisions (or close approximations): Billiard balls colliding. Marbles colliding. Carts on air tracks colliding bumper-to-bumper, when the bumpers are made of rubber bands. Atoms, molecules, protons, electrons, etc. colliding (as long as they do not stick together). If kinetic energy is not conserved in a collision, the collision is “inelastic.” Never use Kf = Ki if you know a collision is inelastic. If the colliding objects deform, stick together, heat up, lose heat or sound energy to their surroundings, etc., the collision is inelastic. Examples of inelastic collisions: Your car and a truck. You and a truck. Chewing gum thrown at the wall. Rain falling in a bucket. Railroad cars being coupled together. A basketball dropped on the floor. 7.5 Elastic Collisions in One Dimensions Example 7-7. A proton of mass M traveling with a speed Vp collides head-on with a helium nucleus of mass 4M at rest. What are the velocities of the proton and helium nucleus after the collision. This is an example of an elastic collision. Why? That’s what section it is in. The book tells you it is. Collisions between neutral or like-charged nuclear-type particles are usually elastic. “Head-on” means the collision is not at a glancing angle, which means all motion takes place in one dimension (say, the xaxis). Makes the problem much easier. This is a momentum problem. Remember the litany! Step 1: draw before and after sketch. Vp 4M M before Vpf VHef M 4M after I chose velocities “positive” (after I put in the x-axis) so I won’t be tricked into putting in an extra – sign later. Step 2: label point masses and draw velocity or momentum vectors (your choice). Already done! x x Vp Vpf VHef M 4M 4M M before after Step 3: choose axes, lightly draw in components of any vector not parallel to an axis. Step 4: OSE. not a required step, but I thought you should see it Jext 0 = Pf – Pi 0 Ef – Ei = [Wother]if 0 0 0 0 0 = Kf + Ugf + Usf – Ki – Ugi - Usi x x Vp 4M M before Vpf VHef M 4M after Continuing from previous slide… Pf = Pi Kf = Ki Step 5: zero out external impulse if appropriate. Already done! x Vp x VHe,initial=0 4M M before Vpf VHef M 4M after Step 6: write out initial and final sums of momenta (not velocities). Zero out where appropriate. This is a combined momentum plus energy problem, but for this step I will just write out the momenta. I’ll put velocities in the next step. 0 ppfx + pHefx = pp + pHe,initial Dang! My figure doesn’t justify zeroing out the initial He momentum. Better fix that up right now! x Vp x VHe,initial=0 4M M before Vpf VHef M 4M after Step 7: substitute values based on diagram and solve. From conservation of momentum: M Vpfx + (4M) VHefx = M Vp Conservation of energy: Kf = Ki we want to find Vpfx and VHefx ½M(Vpfx)2 + ½(4M)(VHefx)2 = ½M(Vp)2 M Vpfx + (4M) VHefx = M Vp ½M(Vpfx)2 + ½(4M)(VHefx)2 = ½M(Vp)2 Vpfx + 4VHefx = Vp ----- (1) (Vpfx)2 + 4(VHefx)2 = (Vp)2 ----- (2) Two equations, two unknowns. How would you solve? You would probably solve (1) for Vpfx (or VHefx) in terms of the other unknown, plug the result into (2), and solve the quadratic. Not impossibly difficult here, but what do you do about the sign? And what about more complex problems, where the helium initial velocity is nonzero? There’s a mathematical “trick” (actually, technique) that works well here and is the only way to get an easy solution in more complex problems. The technique is used on page 188 to derive equation 7-7, which Giancoli uses a number of times later on. It’s not on your OSE sheet because it is not “fundamental.” If I want you to use the technique (shown in a minute) I’ll let you know (probably in a hint). Winter/spring 2004, skip to slide 25. Vpfx + 4VHefx = Vp ----- (1) (Vpfx)2 + 4(VHefx)2 = (Vp)2 ----- (2) To better illustrate the technique, on the next page I will use m in place of the proton mass, and M in place of the helium mass, because in general the masses don’t cancel so conveniently. mVpfx + MVHefx = mVp ----- (1) m(Vpfx)2 + M(VHefx)2 = m(Vp)2 ----- (2) Group all terms with m on one side, all terms with M on the other side (especially useful if initial velocity of M is nonzero, because the quadratic would be very difficult). mVpfx - mVp = -MVHefx ----- (1) m(Vpfx)2 - m(Vp)2 = -M(VHefx)2 ----- (2) The left hand side of equation (2) can be factored mVpfx - mVp = -MVHefx m(Vpfx+Vp)(Vpfx-Vp) = -M(VHefx)2 ----- (1) ----- (2) Neither side of equation (1) is zero (why?) so divide (2) by (1) to give… mVpfx - mVp = -MVHefx (Vpfx+Vp) = VHefx ----- (1) ----- (2)* Now I can plug VHefx from (2) back into (1) to get Vpfx: mVpfx - mVp = -M (Vpfx + Vp) mVpfx - mVp = -MVpfx - MVp mVpfx + MVpfx = mVp - MVp (m+M)Vpfx = (m-M)Vp Vpfx = (m-M) Vp / (m+M) You could use this Vpfx in (1) or (2) to get VHefx. *Wow! No more quadratic. Just a simple 2 equation, 2 unknown system! mVpfx - mVp = -MVHefx ----- (1) (Vpfx+Vp) = VHefx ----- (2) I find it easier to solve (2) for Vpfx and get VHefx from (1): m(VHefx-Vp) - mVp = -MVHefx mVHefx - 2mVp = -MVHefx mVHefx + MVHefx = 2mVp (m+M)VHefx = 2mVp VHefx = 2mVp / (m+M) When I set the problem up, I said M=4m. In the text, Giancoli uses M=4u and m=1.01u (u=1.66x10-27 kg). I haven’t boxed my answers, because I am not quite done yet. Vpfx = (m-M) Vp / (m+M) VHefx = 2mVp / (m+M) M>m so Vpfx is negative, but VHefx is positive. That means the lightweight proton bounced back to the left after it collided with the helium, and the helium was given a “kick” to the right. That makes sense, so now I put a box around my answers. You can review the algebra that got this result. I’ll design test/quiz problems so that you don’t have to go through such a complex algebraic process in a limited time and under pressure. Abbreviated Litany for Momentum Problems Step 1: draw before and after sketch. Step 2: label point masses and draw velocity or momentum vectors (your choice). Step 3: choose axes, lightly draw in components of any vector not parallel to an axis. Step 4: OSE. Step 5: zero out external impulse if appropriate. Step 6: write out initial and final sums of momenta (not velocities). Zero out where appropriate. Step 7: substitute values based on diagram and solve. 7.6 Inelastic Collisions Example 7-8. A railroad car of mass M moving with a speed V collides with a stationary railroad car of mass M. Calculate how much kinetic energy is transformed to thermal or other forms of energy. In lecture 16, we used conservation of momentum to show that the two railroad cars move together with a speed of V/2 after the collision. x x Vi1=V Vi2=0 Vf=V/2 M M M M before after x x Vi1=V Vi2=0 Vf=V/2 M M M M before after Now we look at the change in kinetic energy… K = Kf - Ki K = ½(2M)(V/2)2 – ½MV2 K = ¼MV2 – ½MV2 K = -¼MV2 = -½Ki Half the initial kinetic energy is “lost” in the collision. Example 7-9. A bullet of mass m and speed v is fired into (and sticks in) a hanging block of wood of mass M. The wood is initially at rest. Calculate the height h the wood block rises after the collision. The collision between the bullet and block is handled using Jext = Pf – Pi . After the collision, the motion of the block+bullet is handled using Ef – Ei = [Wother]if . I’ll work this one on the blackboard. 7.7 Collisions in Two or Three Dimensions We’ll skip this section. To solve a collision in more than one dimension, just solve for each component separately.