Systems of 1st-order IVPs
and Higher-order IVPs
Douglas Wilhelm Harder, M.Math. LEL
Department of Electrical and Computer Engineering
University of Waterloo
Waterloo, Ontario, Canada
ece.uwaterloo.ca
dwharder@alumni.uwaterloo.ca
© 2012 by Douglas Wilhelm Harder. Some rights reserved.
Systems of 1st-order IVPs and Higher-order IVPs
Outline
This topic takes us from simple first-order IVPs to:
– Systems of IVPs
– Higher-order IVPs
• Systems of 2nd-order IVPs
2
Systems of 1st-order IVPs and Higher-order IVPs
Outcomes Based Learning Objectives
By the end of this laboratory, you will:
– Understand how to approximate the solution to a system of N
coupled IVPs
– Understand the reformulation of an Nth-order IVP as a system of
N coupled IVPs
– Understand the reformulation of a system of N 2nd-order IVPs as
a system of 2·N 1st-order IVPs
3
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
A system of N coupled first-order ODEs are N different
equations of the form:
y1 t f1 t , y1 t , y2 t ,
, yN t
y21 t f 2 t , y1 t , y2 t ,
, yN t
yN 1 t f N t , y1 t , y2 t ,
, yN t
1
4
Systems of 1st-order IVPs and Higher-order IVPs
5
Systems of ODEs
This is a simple system of two coupled ODEs:
r 1 t r t 1 2 f t Rabbit families per acre: r(t)
f 1 t f t r t 1
Fox families per acre : f(t)
It represents the rates of growth of a predator and prey
in a natural system:
– Rabbits density will grow exponentially, r t 0 , if there
aren’t too many foxes: f t 12 foxes per acre
– Foxes will grow exponentially, f 1 t 0 , if there are
sufficiently many rabbits: r t 1 fox per acre
1
Systems of 1st-order IVPs and Higher-order IVPs
6
Systems of IVPs
However, there the relations are coupled:
– As the rabbits grow, the foxes grow,
– As the foxes grow, the density of rabbits shrinks faster
How do the two interact?
– Suppose that the initial state is:
• A fox density of 0.3 foxes per acre
• A rabbit density of 0.5 rabbits per acre
r(0) = 0.3
f(0) = 0.5
– Initially:
• The rabbit population will be increasing:
• The fox population will be decreasing:
1 – 2 × 0.3 = 0.4 > 0
0.5 – 1 = –0.5 < 0
– Unfortunately, there is no exact solution to this system of ODEs
Systems of 1st-order IVPs and Higher-order IVPs
Systems of IVPs
If you ask Maple 13 for a solution, it doesn’t find one:
> dsolve( {D(r)(t) = r(t)*(1 - 2*f(t)),
D(f)(t) = f(t)*(r(t) - 1),
r(0) = 3/10,
f(0) = 1/2} );
# No solution...
We will have to find a numerical approximation…
7
Systems of 1st-order IVPs and Higher-order IVPs
Systems of IVPs
Solving this we expect the following behaviour:
– As the rabbit population increases, so do the foxes
– At some point, the foxes are so populous that they are killing
most of the rabbits
8
Systems of 1st-order IVPs and Higher-order IVPs
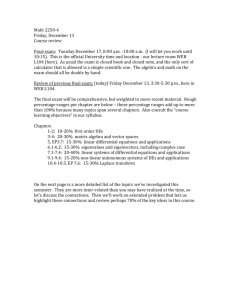
Foxes versus Rabits
If we plot f(t) versus r(t), we note the solutions are cyclic
– In nature, there are other variables that we don’t account for
9
Systems of 1st-order IVPs and Higher-order IVPs
Lorenz Equations
Another example are the Lorenz equations (N = 3) :
x t y t x t
1
y t x t z t y t
1
z 1 t x t y t z t
These three equations represent the relationships
between three properties of atmospheric conditions
x y x
y x z y
z xy z
Here x, y and z are understood to be functions of time
– These also do not have general solutions…
10
Systems of 1st-order IVPs and Higher-order IVPs
Lorenz Equations
As before, we would have to know the initial state of the
system at some time t0:
x t0 x0
y t 0 y0
z t0 z0
11
Systems of 1st-order IVPs and Higher-order IVPs
Lorenz Equations
Given = = = 1, the system converges on the origin
– The initial point is (1, 1, 1) but any point will converge
12
Systems of 1st-order IVPs and Higher-order IVPs
Lorenz Equations
Given = = 1 and = –1, the system diverges spiralling
along the z-axis
– The initial point is (1, 1, 1) but most points will diverge
13
Systems of 1st-order IVPs and Higher-order IVPs
Lorenz Equations
Given = 10, = 99.96, and = 8/3, the system
converges to a cycle
– The initial point is (1, 1, 1) but all systems will approach the cycle
(or attractor)
14
Systems of 1st-order IVPs and Higher-order IVPs
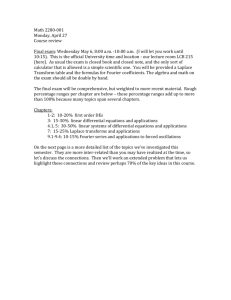
Lorenz Equations
Given = 10, = 28, and = 8/3, the system remains
bounded; but there is no limit cycle
– The initial point is (1, 1, 1) but most points will flow forever
– The butterfly shape is called a strange attractor
15
Systems of 1st-order IVPs and Higher-order IVPs
Systems of IVPs
Solving systems of equations is, fortunately, straightforward:
– Rewrite
y1 t f1 t , y1 t , y2 t ,
, yN t
y21 t f 2 t , y1 t , y2 t ,
, yN t
yN1 t f N t , y1 t , y2 t ,
, yN t
1
y1 t
y
t
2
by starting with: y t
yN t
16
Systems of 1st-order IVPs and Higher-order IVPs
Systems of IVPs
The differential equations become:
y1 t f1 t , y1 t , y2 t ,
, yN t
y1 t f1 t , y t
y21 t f 2 t , y1 t , y2 t ,
, yN t
y21 t f 2 t , y t
yN1 t f N t , y1 t , y2 t ,
, yN t
yN1 t f N t , y t
1
1
y1 t
We can thus define a vector-valued function:
y
t
y t 2
f1 t , y t
f2 t, y t
yN t
f t, y t
f N t, y t
17
Systems of 1st-order IVPs and Higher-order IVPs
Systems of IVPs
But, if
y1 t
y
t
y t 2
, it follows that
yN t
y11 t
1
y t
1
y t 2
y 1 t
N
f1 t , y t
f2 t, y t
1
Therefore, y t
f t, y t
f N t, y t
18
Systems of 1st-order IVPs and Higher-order IVPs
19
Systems of IVPs
In our two examples:
function [dy] = f5a( t, y )
dy = [y(1)*(1 - 2*y(2))
y(2)*(y(1) - 1)];
end
function [dy] = f5b( t, y )
sigma = 10;
rho = 28;
beta = 8/3;
dy = [sigma*(y(2) - y(1))
y(1)*(rho - y(3)) - y(2)
y(1)*y(2) - beta*y(3)];
end
r 1 t r t 1 2 f t
f 1 t f t r t 1
Here, the 2nd argument is
a 2-dimensional column
vector...
Here it is a 3-d column vector
x t y t x t
1
y t x t z t y t
1
z 1 t x t y t z t
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
We also need initial conditions:
y1 t0
y
t
y t0 2 0 y 0
y
t
N 0
In our two examples:
y5a0 = [3/10 1/2]';
y5b0 = [1 1 1]';
20
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
Thus, we have IVPs both a single ODE and a system of
ODES:
1
1
t f t, y t
y t 0 y0
y
t f t, y t
y t0 y 0
y
21
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
With a single ODE, we saw that we could approximate:
y t0 h y0 h f t0 , y t0
Is this any different with a system?
y t0 h y 0 h f t0 , y t0
22
Systems of 1st-order IVPs and Higher-order IVPs
23
Systems of ODEs
Thus, our output will be a vector of values:
A vector for k = 1:(n - 1)
K1 = f( t_out(k),
of slopes
y_out(k) );
K2 = f( t_out(k + 1), y_out(k) + h*K1 );
Scalar multiplication
and vector addition
y_out(k + 1) = y_out(k) + h*(K1 + K2)/2;
end
Scalar multiplication
and vector addition
Systems of 1st-order IVPs and Higher-order IVPs
24
Systems of ODEs
You will recall with dp45, we began with an initial value
and then continued to calculate subsequent entries:
t_out =
0
0.1
0.2
0.3
0.5
0.7
y_out =
1
1.0321
1.7262
2.1570
2.5895
3.1539
Systems of 1st-order IVPs and Higher-order IVPs
25
Systems of ODEs
We will now begin with a vector of initial values and at
each step, calculate the solutions to all entries:
t_out =
0
0.1
0.2
0.3
0.5
0.7
y_out =
1
2
1.0321
1.9832
1.7262
1.9792
2.1570
2.0012
2.5895
2.0678
3.1539
2.1134
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
In fact, we can use the exact same routines:
– For Heun’s method, we would simply determine the dimensions
[N, y0_cols] = size( y0 );
if y0_cols ~= 1
% We have an exception
end
y_out = zeros( N, n );
y_out(:, 1) = y0;
26
Systems of 1st-order IVPs and Higher-order IVPs
Systems of ODEs
In addition, we will have to be more careful with
assignments:
for k = 1:(n - 1)
K1 = f( t_out(k),
y_out(:, k) );
K2 = f( t_out(k + 1), y_out(:, k) + h*K1 );
y_out(:, k + 1) = y_out(:, k) + h*(K1 + K2)/2;
end
Referring to the kth and (k + 1)st columns
27
Systems of 1st-order IVPs and Higher-order IVPs
Modifying the Adaptive
Euler-Heun Method
28
If you look at the code for an adaptive Euler-Heun, we
need only one change:
k = 1;
while t_out(k) < tf
K1 = f( t_out(k),
y_out(:, k) );
K2 = f( t_out(k + 1), y_out(:, k) + h*K1 );
y = y_out(:, k) + h*K1;
z = y_out(:, k) + h*(K1 + K2)/2;
s = h*eps_step/(2*(tf - t0)*abs( y - z ));
if s >= 2
% ...
end
end
What is the absolute value of a vector?
Systems of 1st-order IVPs and Higher-order IVPs
Modifying the Adaptive
Euler-Heun Method
We cannot calculate the absolute value of the difference
between two vectors:
s = h*eps_abs/(2*(tf - t0)*abs( y - z ));
Now, if both y and z approximate the system at time
t_out(k + 1), they are both vectors approximating the
same value
– Two vectors are close if the norm of the difference is small
– Assuming we want the final approximation to be within eabs, we
must use the norm:
s = h*eps_abs/(2*(tf - t0)*norm( y - z ));
29
Systems of 1st-order IVPs and Higher-order IVPs
Modifying the Dormand-Prince Method
The last step is modifying our Dormand-Prince function:
– First, we must determine the number of IVPs we are using
– We can use the initial condition y0
[N, y0_cols] = size( y0 );
– We need to check that y0,cols = 1, that is, the initial condition must
be a column vector
– Throw an appropriate exception if it is not a column vector
– As before, we initialize
y_out = y0;
30
Systems of 1st-order IVPs and Higher-order IVPs
Modifying the Dormand-Prince Method
The last step is modifying our Dormand-Prince function:
– In addition to changes we discussed in Heun’s method, we will
need to calculate slopes for each of the N differential equations:
K = zeros( N, n_K );
for m = 1:n_K
% Assign the output to the m'th column of K
end
– To approximate the next set of points, we must access the kth
column of the previous approximation
y = y_out(:, k) + h*K*by;
z = y_out(:, k) + h*K*bz;
31
Systems of 1st-order IVPs and Higher-order IVPs
Modifying the Dormand-Prince Method
The last step is modifying our Dormand-Prince function:
– In determining the scaling factor, as before, we use the norm
– Finally, when we assign to yout, we must indicate that we are
assigning to the (k + 1)st column
– For example:
>> v = [1 2]';
>> v(:, 2) = [3 4]';
>> v(:, 3) = [5 6]';
>> v(:, 4) = [7 8]'
v =
1
3
5
2
4
6
7
8
32
Systems of 1st-order IVPs and Higher-order IVPs
33
Example
As an example, using the fox-and-rabbit example:
format long
[t5a, y5a] = dp45( @f5a, [0, 1], [3/10 1/2]', 0.1, 1e-5 )
t5a =
0
0.100000000000000
0.300000000000000
y5a =
0.300000000000000
0.301027434326078
0.308934964376129
0.500000000000000
0.466212959860404
0.405658801479583
0.700000000000000
1.000000000000000
0.346907366856264
0.309729860800291
0.395416197986561
0.256363047854678
Systems of 1st-order IVPs and Higher-order IVPs
Example
In this example, the values of K, y, z, and s at the four
steps are
0.0042 0.0062
0.0164 0.0181 0.0203 0.0203
0
K
0.3500
0.3451
0.3427
0.3306
0.3285
0.3259
0.3259
t1 = 0.0
h = 0.1
Approximating at t2 = 0.1
0.301027434326078
y
0.466212959860404
0.301027433242441
z
0.466212959694911
s = 4.621361955798724
Note: double the value of h for the next interval...
34
Systems of 1st-order IVPs and Higher-order IVPs
Example
In this example, the values of K, y, z, and s at the four
steps are
0.0203 0.0283 0.0320 0.0509 0.0542 0.0583 0.0583
K
0.3259
0.3164
0.3118
0.2891
0.2852
0.2803
0.2803
t2 = 0.1
h = 0.2
Approximating at t3 = 0.3
0.308934964376129
y
0.405658801479583
0.308934940809368
z
0.405658801343818
s = 2.552250077040883
Note: double the value of h for the next interval...
35
Systems of 1st-order IVPs and Higher-order IVPs
Example
In this example, the values of K, y, z, and s at the four
steps are
0.0583 0.0732 0.0802 0.1170 0.1238 0.1322 0.1320
K
0.2803
0.2631
0.2550
0.2164
0.2098
0.2020
0.2023
t3 = 0.3
h = 0.4
Approximating at t4 = 0.7
0.346907366856264
y
0.309729860800291
0.346907152277278
z
0.309729948827600
s = 1.713629107867625
Note: h is unchanged: 1 ≤ s < 2,
but 0.7 + 0.4 > 1, so use h = 1 – 0.7 = 0.3
36
Systems of 1st-order IVPs and Higher-order IVPs
Example
In this example, the values of K, y, z, and s at the four
steps are
0.1856
0.1928 0.1927
0.1320 0.1436 0.1494 0.1799
K
0.2023
0.1920
0.1871
0.1637
0.1597
0.1549
0.1550
t4 = 0.7
h = 0.3
Approximating at t5 = 1.0
0.395416197986561
y
0.256363047854678
0.395416207967321
z
0.256363054795897
s = 3.332843689929424
37
Systems of 1st-order IVPs and Higher-order IVPs
Predator-Prey Models
In addition, you can try the following:
[t5a, y5a] = dp45( @f5a, [0, 6.66], [3/10 1/2]', 0.001, 1e-10 );
size( y5a )
ans =
2
817
plot( y5a(1, :), y5a(2, :) )
38
Systems of 1st-order IVPs and Higher-order IVPs
The Lorenz Equations
In addition, you can try the following:
[t5b, y5b] = dp45( @f5b, [0, 10], [1 1 1]', 0.001, 1e-5 );
size( y5b )
ans =
3
2318
plot3( y5b(1, :), y5b(2, :), y5b(3, :) )
39
Systems of 1st-order IVPs and Higher-order IVPs
The Lorenz Equations
If you’re willing to wait longer:
[t5b, y5b] = dp45( @f5b, [0, 100], [1 1 1]', 0.001, 1e-4 );
size( y5b )
ans =
3
29634
plot3( y5b(1, :), ...
y5b(2, :), y5b(3, :) )
40
Systems of 1st-order IVPs and Higher-order IVPs
41
Higher-order ODEs
Now, what do we do if we want to approximate a higherorder IVP?
– Suppose we have an Nth-order ODE
Again, by the implicit function theorem, we can, in
general, write any differential equation in the form
y N t f t , y t , y 1 t ,..., y N 1 t
For this, we
need N initial values:
y t 0 y0
1
1
y t 0 y0
All are given constants
y N 1 t0 y0 N 1
Systems of 1st-order IVPs and Higher-order IVPs
Higher-order ODEs
To solve this problem, note that we can define
w1 t y t
1
y
t
w2 t
w3 t y 2 t
w t
w t N 2
t
N 1 y
w t N 1
N
y
t
42
Systems of 1st-order IVPs and Higher-order IVPs
Higher-order ODEs
Differentiating this vector, we have:
w11 t y 1 t w t
1
2
2
w2 t y t w3 t
1
3
w
t
w
t
y
t
4
1
w t 3
wN 11 t y N 1 t wN t
N
N
1
w t y t y t
N
w1 t y t
1
y
t
w
t
2
w3 t y 2 t
w t
w t
N 2
t
N 1 y
w t N 1
N
y
t
43
Systems of 1st-order IVPs and Higher-order IVPs
Higher-order ODEs
The only missing component is y(n)(t):
w11 t y 1 t w t
1
2
2
w2 t y t w3 t
1
3
w
t
w
t
y
t
4
1
w t 3
wN 11 t y N 1 t wN t
N
N
1
w t y t y t
N
44
Systems of 1st-order IVPs and Higher-order IVPs
45
Higher-order ODEs
Recall, however, the original ODE:
y N t f t , y t , y 1 t ,..., y N 1 t
f t , w1 t , w2 t ,..., wN t
We can rewrite the ODE as a function of time and an nN
dimensional vector: y t f t , w t
w1 t y t
1
y
t
w
t
2
w3 t y 2 t
w t
w t
N 1
w t
N
N 2
y
t
N 1
y
t
Systems of 1st-order IVPs and Higher-order IVPs
Higher-order ODEs
Thus, we can use the nth-order ODE to create a system
of n 1st-order ODEs
w2 t
w
t
3
w4 t
1
w t
w t
N
f t, w t
46
Systems of 1st-order IVPs and Higher-order IVPs
4th-order
47
IVP
For example, consider the Euler-Bernoulli beam theory:
v
4
z
w1 z v z
v 1 z
w2 z
w z
w3 z v 2 z
3
w4 z v z
User: Lzyvz
q z
EI
Elastic modulus
Second moment of area
w2 z
w
z
3
1
w z w4 z
q z
EI
Systems of 1st-order IVPs and Higher-order IVPs
48
Higher-order IVPs
The initial values for these n functions are:
w1 t0 y t0 y0
1
1
y t0 y0
w2 t0
w3 t0 y 2 t0 y 2
0
w t0
w t N 2
N 2
t0 y0
N 1 0 y
N 1
w t N 1
N 0 y
t0 y0
y t0 y0
y 1 t0 y01
y N 1 t0 y0 N 1
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
IVP
49
Suppose we are given the IVP (N = 2):
y 2 t y 1 t 3 y t t 1
y 0 1.2
y 1 0 1.3
We would therefore define:
w1 t
w t
w
t
2
w2 t
w t
w
t
3
w
t
t
1
1
2
1
1.2
w t0 w 0
1.3
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
50
IVP
In Matlab:
w1 t
w t
w2 t
w2 t
w t
w2 t 3w1 t t 1
1
would be translated as:
function [dw] = f5c( t, w )
dw = [w(2)
-w(2) - 3*w(1) + t - 1];
end
1.2
w t0 w 0
1.3
[1.2 1.3]'
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
IVP
Now, we simply use our dp45 function:
[t5c, y5c] = dp45( @f5c, [0, 1], [1.2, 1.3]', 0.1, 1e-4 )
t5c =
0 0.1000 0.3000 0.5000 0.7000 0.9000 1.0000
y5c =
1.2000 1.3011 1.3425 1.2068 0.9479 0.6233 0.4535
1.3000 0.7273 -0.2772 -1.0339 -1.5062 -1.6948 -1.6915
The 1st row of y5c are the values y(t)
The 2nd row are the values of y(1)(t)
51
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
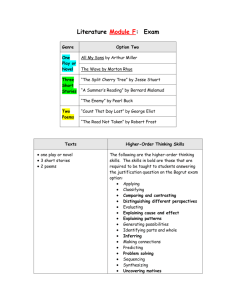
IVP
Taking a look at the results:
plot( t5c, y5c(1, :), 'bo-' ); hold on
plot( t5c, y5c(2, :), 'ro-' )
52
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
IVP
Solving this in Maple, we have:
> dsolve( {(D@@2)(y)(t) = -D(y)(t) - 3*y(t) + t - 1,
y(0) = 1.2, D(y)(0) = 1.3}, y(t) );
> CodeGeneration[Matlab]( rhs(%) );
cg0 = 0.161e3 / 0.495e3 *
exp(-t / 0.2e1) * sin(sqrt(0.11e2) *
t / 0.2e1) * sqrt(0.11e2) + 0.74e2 /
0.45e2 * exp(-t / 0.2e1) *
cos(sqrt(0.11e2) * t / 0.2e1) 0.4e1 / 0.9e1 + t / 0.3e1;
> plot( rhs(%), t = 0..10 );
53
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
IVP
54
We can save the actual solution as a Matlab function:
function [y] = y5c_soln(t)
y = 0.161e3/0.495e3.*exp( -t/0.2e1 ) ...
.*sin( sqrt( 0.11e2 ).*t/0.2e1 ).*sqrt( 0.11e2 ) ...
+ 0.740e2/0.450e2.*exp( -t/0.2e1 ) ...
.*cos( sqrt( 0.11e2 ).*t/0.2e1 ) ...
- 0.4e1/0.9e1 + t/0.3e1;
end
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
IVP
We can now solve and plot the actual solution:
[t5c, y5c] = dp45( @f5c, [0, 10], [1.2, 1.3]', 0.1, 1e-4 );
plot( t5c, y5c_soln( t5c ), 'r' );
hold on
plot( t5c, y5c(1, :), 'o' );
abs( y5c(1, end) - y5c_soln( 10 ) )
ans =
1.4711e-006
55
Systems of 1st-order IVPs and Higher-order IVPs
2nd-order
56
IVP
How good is this approximation overall?
hold off; plot( t5c, y5c(1, :) - y5c_soln( t5c ), 'ro' );
eabs = 0.0001
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
Consider the RLC circuit
Applying KCL, we have:
1 t
L R d vC t0 Vin
C t0
Substituting q , we get
1
Lq Rq q Vin
C
57
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
58
Suppose we are given the IVP (N = 2):
Vin R
1
q
q
q
L L
CL
We would therefore define:
w1 t
w t
w
t
2
w2 t
w 1 t Vin R
1
w2 t
w1 t
CL
L L
q0
w t0 w 0
0
Systems of 1st-order IVPs and Higher-order IVPs
59
RLC Circuit
In Matlab:
w1 t
w t
w2 t
w2 t
w 1 t Vin R
1
w2 t
w1 t
CL
L L
q0
w t0 w 0
0
would be translated as:
function [dw] = f5d( t, w )
L = 2;
% 2 H
R = 1;
% 1 ohm
C = 1/3;
% 0.333 F
V_in = 1;
dw = [w(2)
V_in/L - R/L*w(2) - 1/C/L*w(1)];
end
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
Now, we simply use our dp45 function:
[t5d, y5d] = dp45( @f5d, [0, 1], [0, 0]', 0.1, 1e-4 )
t5d =
0
0.1000
0.3000
0.7000
1.0000
y5d =
0
0.0025
0.0212
0.1030
0.1886
0
0.0486
0.1362
0.2605
0.3026
The 1st row of y5d are the values q(t)
The 2nd row are the values of q(1)(t) = (t)
60
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
Taking a look at the results:
plot( t5d, y5d(1, :), 'bo-' ); hold on
plot( t5d, y5d(2, :), 'ro-' )
61
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
Solving this in Maple, we have:
> L := 2; R := 1; C := 1/3; V_in := 1;
> dsolve({(D@@2)(q)(t) = V_in/L - R/L*D(q)(t) - 1/C/L*q(t), q(0) = 0,
D(q)(0) = 0}, q(t) );
> CodeGeneration[Matlab]( rhs(%) );
cg = -exp(-t / 0.4e1) * sin(sqrt(0.23e2) *
t / 0.4e1) * sqrt(0.23e2) / 0.69e2 exp(-t / 0.4e1) * cos(sqrt(0.23e2) * t /
0.4e1) / 0.3e1 + 0.1e1 / 0.3e1;
> plot( rhs(%), t = 0..10 );
62
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
63
We can now solve and plot the actual solution:
function [y] = y5d_soln(t)
y = -exp( -t/0.4e1 ).*sin( sqrt(0.23e2)*t/0.4e1 )*sqrt( 0.23e2 )/0.69e2 ...
- exp( -t/0.4e1 ).*cos( sqrt(0.23e2)*t/0.4e1 )/0.3e1+0.1e1/0.3e1;
end
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit
We can now solve and plot the actual solution:
[t5d, y5d] = dp45( @f5d, [0, 10], [0, 0]', 0.1, 1e-4 );
plot( t5d, y5d_soln( t5d ), 'r' );
hold on; plot( t5d, y5d(1, :), 'o' );
64
Systems of 1st-order IVPs and Higher-order IVPs
65
RLC Circuit
How good is this approximation?
plot( t5d, y5d(1, :) - y5d_soln( t5d ), 'ro' );
eabs = 0.0001
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
Given a set of initial conditions, we could solve this for
any initial conditions, but then again, we can do this
analytically, too!
What happens if the coefficients are time varying?
– What if we shut off the voltage source at time t = 5?
66
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
w2 t
w 1 t Vin u 5 t R
1
w
t
w
t
2
1
L
L
CL
In Matlab:
would be translated as:
function [dw] = f5d( t, w )
L = 2;
% 2 H
R = 1;
% 1 ohm
C = 1/3;
% 0.333 F
V_in = 1;
dw = [w(2)
V_in*(t < 5)/L - R/L*w(2) - 1/C/L*w(1)];
end
67
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
Suddenly, it seems that dp45 goes into an infinite loop
[t5d, y5d] = dp45( @f5d, [0, 10], [0, 0]', 0.1, 1e-4 );
What could have happened?
– The discontinuity in the input voltage means that even the
derivative at t = 5 is discontinuous
– The Dormand-Prince method assumes the solution to be
continuously differentiable—consequently, it keeps dividing
and dividing h until t_out(k) + h == t_out(k)
68
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
How do we fix this?
– After having calculated y and z, if
t_out(k) + h/2 == t_out(k)
then accept the current value of h regardless of the
value of s
– Another possibility may be to have a minimum on
h relative to the magnitude of tk, for example, if
t_out(k) + 0.001*h/2 == t_out(k)
69
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
We can now solve and plot the actual solution:
[t5d, y5d] = dp45( @f5d, [0, 10], [0, 0]', 0.1, 1e-4 );
plot( t5d, y5d(1, :), 'o' );
70
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
We can zoom in on the discontinuity:
[t5d, y5d] = dp45( @f5d, [0, 10], [0, 0]', 0.1, 1e-4 );
plot( t5d(28:113), y5d(1, 28:113), 'o' );
71
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
Plotting the size of h, it is unchanging away from the
discontinuity; however, near the discontinuity, it is first
halved and then doubled:
plot( t5d(20:122), diff( t5d(20:123) ), '.' )
72
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Discontinuous Forcing Function
This is easier to see on a log scale:
plot( t5d(20:122), log( diff( t5d(20:123) ) ), '.' )
73
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Sinusoidal Forcing Function
Suppose the voltage source is sinusoidal
– The voltage source could be Vin sin(10t)
74
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Sinusoidal Forcing Function
w2 t
w 1 t Vin sin 10t R
1
w
t
w
t
2
1
L
L
CL
In Matlab:
would be translated as:
function [dw] = f5d( t, w )
L = 2;
% 2 H
R = 1;
% 1 ohm
C = 1/3;
% 0.333 F
V_in = 1;
dw = [w(2)
V_in*sin(10*t)/L - R/L*w(2) - 1/C/L*w(1)];
end
75
Systems of 1st-order IVPs and Higher-order IVPs
RLC Circuit with a
Sinusoidal Forcing Function
We can now solve and plot the actual solution:
[t5d, y5d] = dp45( @f5d, [0, 20], [0 0]', 0.01, 1e-6 );
plot( t5d, y5d(1, :), '.' );
76
Systems of 1st-order IVPs and Higher-order IVPs
Systems of
2nd-order
77
IVPs
Suppose we have a system of 2nd-order IVPs
y1 t0 y1,0
t ,
y t f t, y t , y t ,
2
1
y
2
2
t
f1 t , y1 t , y
2
1
, yN t , y
1
1
, yN t , yN t
y N t f N t , y1 t , y1 t ,
2
t
1
1
1
1
N
1
, y N t , y N t
1
1
y11 t0 y1,0
y2 t0 y2,0
y2 t0 y2,0
1
1
y N t0 y N ,0
y N t0 y N ,0
1
1
Systems of 1st-order IVPs and Higher-order IVPs
Systems of
2nd-order
IVPs
We could define a vector-valued function of size 2N:
w1 t y1 t
y 1 t
w2 t 1
w3 t y2 t
1
w t w4 t y2 t
w2 N 1 t y N t
w t 1
2 N y N t
78
Systems of 1st-order IVPs and Higher-order IVPs
Systems of
2nd-order
IVPs
We could define a vector-valued function of size 2N:
w11 t y11 t w t
2
1
2
w2 t y1 t f1 t , w t
1
1
w3 t y2 t w4 t
w 1 t w41 t y2 2 t f 2 t , w t
1
1
w2 N 1 t y N t w2 N t
1
2 f t , w t
N
w2 N t y N t
79
Systems of 1st-order IVPs and Higher-order IVPs
Systems of
2nd-order
IVPs
We could define a vector-valued function of size 2N:
y1 2 t t y1 t y11 t y2 t y21 t
y2 t t y1 t y1 t y2 t y2 t
2
1
1
function [dw] = f5e( t, w )
dw = [w(2)
t + w(1) + w(2) + w(3) + w(4)
w(4)
t + w(1) - w(2) + w(3) - w(4)];
end
80
Systems of 1st-order IVPs and Higher-order IVPs
Systems of
2nd-order
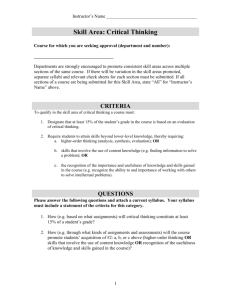
IVPs
Thus, we have:
[t5e, y5e] = dp45( @f5e, [0, 1], [2, 1, 0, -1]', 0.1, 1e-4 );
plot( t5e, y5e(1, :), 'ro-' ); hold on
plot( t5e, y5e(3, :), 'bo-' );
81
Systems of 1st-order IVPs and Higher-order IVPs
Summary
We have looked at using the Dormand-Prince method for
– Solving systems of N coupled IVPs, and
– Solving higher-order IVPs
• Convert an Nth-order IVP into N 1st-order IVPs
• Convert N 2nd-order IVPs into 2N 1st-order IVPs
– We considered time-varying systems
82
Systems of 1st-order IVPs and Higher-order IVPs
References
[1]
Glyn James, Modern Engineering Mathematics, 4th Ed., Prentice Hall,
2007, p.778.
[2]
Glyn James, Advanced Modern Engineering Mathematics, 4th Ed.,
Prentice Hall, 2011, p.164.
[3]
J.R. Dormand and P. J. Prince, "A family of embedded Runge-Kutta
formulae," J. Comp. Appl. Math., Vol. 6, 1980, pp. 19-26.
83