Course Summary and Review
advertisement

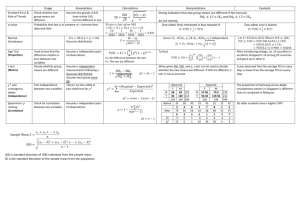
CEE320 Midterm Exam • 10 True/false (20% of points) • 4 Short answer (20% of points) • 3 Calculations (60% of points) – Homework – In class examples Course material covered • • • • Introduction Vehicle dynamics (chapter 2) Geometric design (chapter 3) Pavement design (chapter 4 except 4.3, 4.5, including 4th power thumbrule) Suggestions for Preparation • Review each lecture and identify the main points and formulas. Write these on summary notes. • For each lecture, write an question. Do this in a group, and share questions. • Solve these questions from scratch, do not just review solutions. • Review homework and in class examples. Do the problem yourself. • Make a list of the tables in the text, their title, and the page number. Include a note of what it is used for. Transportation Engineering • The science of safe and efficient movement of people and goods Road Use Growth Increase Multiple (Based on 1960 Values) 4.00 3.50 Vehicle Miles Traveled 3.00 2.50 Registered Vehicles Statute Miles of Roadway 2.00 1.50 1.00 1960 1965 1970 1975 1980 1985 1990 1995 2000 2005 Year From the Bureau of Transportation Statistics, National Transportation Statistics 2003 Sum forces on the vehicle F ma Ra Rrl Rg Aerodynamic Resistance Ra Composed of: 1. Turbulent air flow around vehicle body (85%) 2. Friction of air over vehicle body (12%) 3. Vehicle component resistance, from radiators and air vents (3%) Ra from National Research Council Canada 2 CD Af V 2 Power required to overcome Ra • Power – work/time – force*distance/time – Ra*V 3 PR C D A f V 2 a ft lb 1 hp 550 sec Rolling Resistance Rrl Composed primarily of 1. Resistance from tire deformation (90%) 2. Tire penetration and surface compression ( 4%) 3. Tire slippage and air circulation around wheel ( 6%) 4. Wide range of factors affect total rolling resistance 5. Simplifying approximation: Rrl f rlW V f rl 0.011 147 Grade Resistance Rg Composed of – Gravitational force acting on the vehicle – The component parallel to the roadway Rg W sin g θg For small angles, sin g tan g Rg W tan g tan g G Rg WG Rg θg W G=grade, vertical rise per horizontal distance (generally specified as %) Engine-Generated Tractive Effort M e 0 d Fe r Fe = Engine generated tractive effort reaching wheels (lb) Me = Engine torque (ft-lb) ε0 = Gear reduction ratio ηd = Driveline efficiency r = Wheel radius (ft) Fmax W lr f rl h L h 1 L Front Wheel Drive Braking Force • Ratio BFR f • Efficiency r max b lr h f rl front l f h f rl rear g max We develop this to calculate braking distance – necessary for roadway design Braking Distance • Theoretical • Practical b V12 V22 S 2 g b f rl sin g V12 V22 d a 2 g G g Stopping Sight Distance (SSD) • Worst-case conditions – Poor driver skills – Low braking efficiency – Wet pavement • Perception-reaction time = 2.5 seconds • Equation 2 V1 SSD V1t r a 2 g G g Stationing – Linear Reference System Horizontal Alignment 0+00 2+00 1+00 Vertical Alignment 100 feet >100 feet 3+00 Vertical Curve Fundamentals G1 PVC PVI δ G2 PVT L/2 L=curve length on horizontal x y ax bx c 2 Choose Either: • G1, G2 in decimal form, L in feet • G1, G2 in percent, L in stations Relationships At the PVC : x 0 and Y c dY b G1 dx At the PVC : x 0 and d 2Y G2 G1 G2 G1 Anywhere : 2a a 2 dx L 2L G1 PVC PVI δ G2 PVT L/2 L x Other Properties • K-Value (defines vertical curvature) – The number of horizontal feet needed for a 1% change in slope L K A • A as a percentage • L in feet Crest Vertical Curves For S < L AS For S > L 2 L 200 H1 H 2 2 200 H1 H 2 L 2S A 2 Sag Vertical Curves Light Beam Distance (S) G1 headlight beam (diverging from LOS by β degrees) PVT PVC h1=H G2 PVI h2=0 L For S < L AS L 200H S tan 2 For S > L 200H SSD tan L 2S A Underpass Sight Distance Underpass Sight Distance • On sag curves: obstacle obstructs view • Curve must be long enough to provide adequate sight distance (S=SSD) S<L S>L AS Lm H1 H 2 800 H c 2 2 H1 H 2 800 H c 2 Lm 2S A Horizontal Curve Fundamentals 1 E R 1 cos 2 T R tan PI E 2 18,000 D R 100 L R 180 D M R1 cos 2 Δ T M PC L Δ/2 R PT R Δ/2 Δ/2 Stopping Sight Distance 100 s SSD Rv s 180 D SSD (not L) 180SSD s Rv Ms 90 SSD M s Rv 1 cos Rv Rv Rv M s SSD cos 90 Rv 1 Obstruction Rv Δs Superelevation • Minimum radius that provides for safe vehicle operation • Given vehicle speed, coefficient of side friction, gravity, and superelevation • Rv because it is to the vehicle’s path (as opposed to edge of roadway) Rv V2 e g fs 100