Signal Strength-Based Localization
in Indoor Wireless Networks
A.S. Krishnakumar
Avaya Labs
ask@avaya.com
5 April 2006
Copyright© 2003
2002 Avaya Inc. All rights reserved
Avaya – Proprietary Use pursuant to Company instructions
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
2
Introduction
A wireless terminal is untethered and may be mobile. To
deliver a variety of services, it may be desirable to know
the location of a wireless terminal with some degree of
precision.
• Can we estimate the location
– with enhancements to the end device?
– Without enhancements?
• What techniques are available?
• How accurately can we make this determination?
ask/19-Mar-16
3
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
4
Applications
Wireless location estimation is an important enabling
technology to provide value-added location-aware
services:
In the enterprise:
– Using closest resource in the enterprise
– Privileges based on security regions
– Enhanced e911 services, etc.
In Public spaces:
–
–
–
–
Emergency services
Map/route information
Recreation/Entertainment information
Many others
ask/19-Mar-16
5
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
6
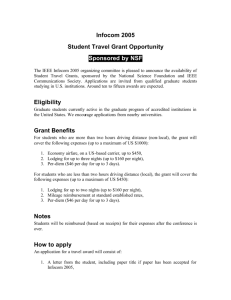
Location Determination in Radio Networks
Location estimation in indoor environments can be based
on different characteristics of radio signals
• Signal strength (RSSI) (e.g., RADAR)
• Angle of arrival - AOA
• Time of arrival - TOA
• Time difference of arrival – TDOA (e.g., Cricket)
ask/19-Mar-16
7
B1
B1
B2
B2
1
2
M
M
3
B3
B3
Angle of Arrival
B1
B1
B2
1
B2
2
M (S1, S2, S3)
M
1-2
2-3
3-1
Time of Arrival
3
B3
B3
TDOA
ask/19-Mar-16
8
Received Signal
Strength
Is this new?
It has all been done before!
• Radar
• LORAN
• GPS
• etc.
So what is new ?
A lot!
ask/19-Mar-16
9
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
10
Location in 802.11 Networks
Desirable Characteristics:
– Use existing hardware without enhancements
– Ideally no client assistance
– Simple to deploy and use
– Adequate accuracy
Complicating Factors:
– Multi-path indoor propagation environment
– Heterogeneous terminals
– Site Engineering
ask/19-Mar-16
11
Location in 802.11 Networks
Attention has been focused on RSSI-based techniques
since they:
• Can be implemented with currently available hardware
• Are reasonably accurate
ask/19-Mar-16
12
Issues in Wireless Location Estimation
• Location accuracy
• Deployment and cost of ownership
• Management
•
•
•
•
Security considerations
Zero-profiling techniques
Deployment for coverage vs. location estimation
Techniques for model adaptation
ask/19-Mar-16
13
RSSI-based Techniques
Client-based approach:
– Client measures the signal strength from “visible”
Access Points and this information is used to locate
the client
Infrastructure-based approach:
– Deploy wireless sniffers that monitor client activity
and measure signal strength information
– No client changes required
– Sniffers can also be used for other monitoring and
security applications
ask/19-Mar-16
14
Grouping of RSSI-based Techniques
Client-based
Infrastructure-based
†
Deterministic
RADAR (Bahl et al.)
[4]
Prasithsangaree et al. [31]
Pandey et al.
[30]
LEASE [22]
Probabilistic
Youssef et al. [40]
HORUS
[41]
Bayesian Nets [24]
Abnizova et al. [1]
Bayesian Nets [24]
Nibble
[9]
†
The reference numbers here correspond to the bibliography in
A.S. Krishnakumar et al., CollaborateCom 2005.
ask/19-Mar-16
15
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
16
RSSI-based Techniques
• Profiling-Based (Collected data is the model)
• Needs a lot of data collection to build the model
– Take signal strength measures at many points in the site and do a
closest match to these points in signal strength vector space.
[e.g., RADAR; INFOCOM 2000]
– Build a prior probability distribution at many chosen points and
use posterior distributions to determine best estimate of location
[e.g., Robotics; IROS 2003]
• Use physical characteristics of signal strength propagation and
build a model augmented with a wall attenuation factor
• Needs detailed (wall) map of the building; model portability
needs to be determined
– [e.g., RADAR; INFOCOM 2000] based on [Rappaport 1992]
• Adaptation
– Environmental and other changes require model rebuilding
ask/19-Mar-16
17
Steps in Profiling-based Techniques
• Data Collection
– Collect signal strength measurements from all the
APs at many points in the area of interest
• Model Generation
– Generate a model; could be the parameters of a
propagation model or a signal-strength vector
map or something else
– Given a signal strength measurement, estimate
the location based on:
• Euclidean distance in signal space
• Maximum likelihood estimate
• Some other measure
ask/19-Mar-16
18
On-line
• Location Determination
A Deterministic Technique - RADAR
Based on Profiling:
• Data Collection – Collect many measurements at each
location on the grid
• Model building:
– The same as the collected data
• On-line Estimation
– Select the location that is the nearest neighbor in signalstrength space to the measured signal strength vector
• Reported median error ~2.9m
Further details may be found in Bahl et al., Infocom 2000
ask/19-Mar-16
19
A Deterministic Technique - RADAR
Based on Propagation Model:
• Data Collection – Collect many measurements at
different distances with and without line of sight
• Model building:
– Estimate propagation model parameters and wall
attenuation
– Use the model to generate a signal strength map
• On-line Estimation
– Select the location that is the nearest neighbor in signalstrength space to the measured signal strength vector
• Reported median error ~4.3m
Further details may be found in Bahl et al., Infocom 2000
ask/19-Mar-16
20
LEASE – Location Estimation Assisted by
Stationary Emitters
• Automatic adaptation to changes
• “Profiling” handled automatically by using SEs
• There is a mapping between client- and infrastructure-based deployments
(and LEASE)
– Interpretation for Client-based deployment
– Sniffers co-located with APs
– Points where you profile signal strength from APs = points where
you place SEs
• Signal Strength model for a sniffer needs to be built using measured
signal strengths from SEs
– Model using minimal number of SEs (“profiled” points)
• Our approach to build signal strength model:
– Treat the problem as a data modeling problem
• Median error ~5m (Further details in Krishnan et al. Infocom 2004)
ask/19-Mar-16
21
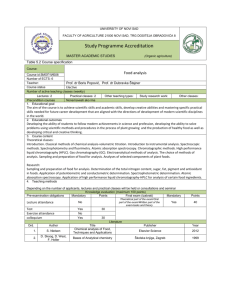
Components of the LEASE system
• Uses sniffers, stationary
emitters (SEs) and a
location estimation engine
(LEE)
• SEs
– Cheap, battery operated
devices at known
locations
– Transmit a few packets
periodically
• Sniffers
– Record signal strength
from the SEs and
clients
– Feed this information to
the LEE
AP:
SE:
Sniffer:
LEE:
• LEE
– (Re-)models the “radio
map” for a sniffer in
response to signal strength
readings of SEs at sniffers
– Uses models to locate
clients.
ask/19-Mar-16
22
A Profiling-based Probabilistic Technique
• Data Collection – Collect many measurements at each
location on the grid
• Model building:
– Histogram of signal strengths at each location (i.e. joint
probability distributions)
• On-line Estimation
– Select the location that maximizes the probability
P(location|measured signal vector)
• Reported median error ~1m
Further details of this technique may be found in Youssef
et al., PerCom 2003
ask/19-Mar-16
23
A Probabilistic Technique without Profiling
• Based on hierarchical Bayesian networks
• Simultaneously estimate the location of a number of
terminals
• The signal strength model is a hyperparameter of the
Bayesian model
• Assume reasonable prior distributions and compute the
posterior density given the measurements
• Use the computed posterior density to estimate the
quantities of interest
• Currently uses Markov Chain Monte Carlo techniques
• Median error ~5m
ask/19-Mar-16
24
Bayesian Networks
Hierarchical
Non-hierarchical
ask/19-Mar-16
25
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
26
Median Error in Estimation
Method
Median Error in Estimation
RADAR - Profiling
~3m
RADAR - Propagation
~4.3m
LEASE
~5m
Probabilistic - Profiling
~1m
Probabilistic – No Profiling
~5m
Elnahrawy et al. observed a localization error of 10 ft
(median) and 30 ft 97 (percentile) over a range of algorithms,
approaches and environments (SECON 2004)
ask/19-Mar-16
27
Estimation Accuracy
The median error values are widely variable. This raises the
following questions:
• Why are they different?
• How do we compare these values?
• Is some kind of normalization possible? If so, how?
• Are there fundamental limits to location accuracy with this
technique?
• What is the dependency on factors such as distance between APs?
A preliminary analytical attempt to address these questions
appeared in A.S. Krishnakumar and P. Krishnan, Infocom 2005.
ask/19-Mar-16
28
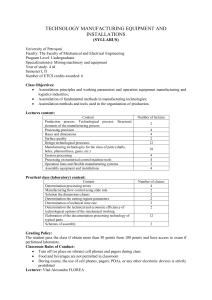
Theoretical Analysis of Accuracy
Physical Space
Probability
mass
S3
T
-1
S0
S2
Y
(x0,y0)
Location
Uncertainty
S1
Signal Space
x
ask/19-Mar-16
29
Estimation Accuracy
The analysis shows that the minimum
value of location uncertainty depends
upon:
• Desired probability α
• Signal variance
• Propagation constant
• Number of APs
• Distance between APs
ask/19-Mar-16
30
Outline
• Introduction
• Applications of Location Information
• Location determination in Radio
Networks
• Problem definition for 802.11 Networks
• Current research and examples
• Limits of location determination
• Conclusion
ask/19-Mar-16
31
Conclusion
• Indoor location determination presents challenges due
multipath propagation and other factors
• We can still estimate location accurately enough for
many applications
• Site engineering affects location accuracy
• The same technique has been applied to Bluetooth
networks with comparable results
• About the only factor affecting location uncertainty that
is in control of the algorithm designer appears to be the
signal variance
ask/19-Mar-16
32
Open issues and research topics
• Security considerations
• Zero-profiling techniques
• Deployment for coverage vs. location estimation
• Techniques for model adaptation
ask/19-Mar-16
33
Bibliography - 1
• [Bahl Infocom 2000] P. Bahl, V.N.Padmanabhan, “RADAR: An In-Building RFbased User Location and Tracking System,” Proceedings of IEEE Infocom 2000,
Tel Aviv, Israel, March 2000.
• [Youssef PerCom 2003] Moustafa Youssef, Ashok Agrawala, A. Udaya Shankar,
“WLAN Location Determination via Clustering and Probability Distributions,”
IEEE International Conference on Pervasive Computing and Communications
(PerCom) 2003, Fort Worth, Texas, March 23-26, 2003.
• [Krishnan Infocom 2004] P. Krishnan, A. S. Krishnakumar, Wen-Hua Ju, Colin
Mallows, Sachin Ganu, “A System for LEASE: Location Estimation Assisted by
Stationary Emitters for Indoor RF Wireless Networks,” Proceedings of IEEE
Infocom 2004, Hong Kong.
• [Krishnakumar Infocom 2005] A.S. Krishnakumar and P. Krishnan, “On the
Accuracy of Signal Strength-based Location Estimation Techniques,” to appear
in the Proceeding of IEEE Infocom 2005, Miami, Florida, March 2005.
• [Madigan Infocom 2005] David Madigan, Eiman Elnahrawy, Richard P. Martin,
Wen-Hua Ju, P.Krishnan, and A.S. Krishnakumar, “Bayesian Indoor Positioning
Systems,” to appear in the Proceedings of IEEE Infocom 2005, Miami, Florida,
March 2005.
ask/19-Mar-16
34
Bibliography - 2
• [Robotics] Andrew M. Ladd, Kostas E. Bekris, Algis Rudys, Lydia E. Kavraki,
Dan S. Wallach, and Guillaume Marceau, “Robotics-based location sensing
using wireless ethernet,” In Proceedings of the eighth Annual International
Conference on Mobile Computing and Networking (MOBICOM-02), pages 227–
238, New York, September 23–28 2002. ACM Press.
• [Rappaport] T. S. Rapport, “Wireless Communications – Principles and
Practice,” IEEE Press, 1996.
• P. Bahl, V.N. Padmanabhan, and A. Balachandran, “Enhancements to the
RADAR user location and tracking system,” Technical report, Microsoft
Research Technical Report, February 2000.
• Prasithsangaree, P. Krishnamurthy, and P.K. Chrysanthis, “On indoor position
location with wireless LANs,” In The 13th IEEE International Symposium on
Personal, Indoor, and Mobile Radio Communications (PIMRC 2002), 2002.
• N.B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The cricket location
support system,” In Proceedings of the Sixth Annual ACM International
Conference on Mobile Computing and Networking, 2000, pages 51–56, 2003.
• M. Youssef and A.K. Agrawala, “Handling samples correlation in the HORUS
system,” In IEEE Infocom, 2004.
ask/19-Mar-16
35
Bibliography - 3
• [Krishnakumar CollaborateCom 2005] A.S. Krishnakumar and P. Krishnan, “The
Theory and Practice of Signal Strength-Based Location Estimation,” The first
international conference on collaborative computing, San Jose, California,
December 2005.
• T. Roos, P. Myllymaki, and H. Tirri, “A statistical modeling approach to location
estimation,” IEEE Transactions on Mobile Computing, 1:59–69, 2002.
• S. Saha, K. Chaudhuri, D. Sanghi, and P. Bhagwat, “Location determination of a
mobile device using IEEE 802.11 access point signals,” In IEEE Wireless
Communications and Networking Conference (WCNC), 2003.
• A. Smailagic, D.P. Siewiorek, J. Anhalt, D. Kogan, and Y. Wang, “Location
sensing and privacy in a context aware computing environment,” Pervasive
Computing 2001, 2001.
ask/19-Mar-16
36