Dynamometer for Testing Frequency Inverter Performance
advertisement

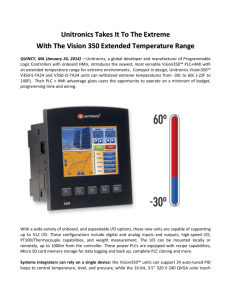
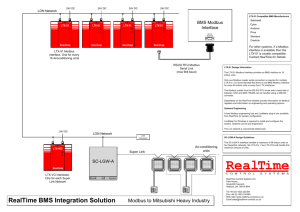
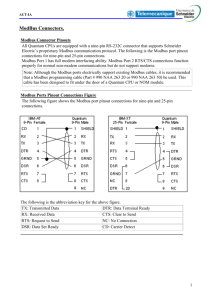
Dynamometer for Testing Frequency Inverter Performance Andres Calle Otero, Alexander Sawyer, Christian Ratliff Team 1603 Sponsored by Lenze Advanced Power Electronics and Electric Drives Lab (APEDL) ECE Department and Center for Clean Energy Engineering 11/13/2015 11/12/2015 Copyright © 2015 – Advanced Power Electronics & Electric Drives Lab (APEDL) 1 Outline • • • • • • • • 11/12/2015 Project Overview Solution GUI HMI/PLC Communication Deliverables Budget Schedule Copyright © 2015 – Advanced Power Electronics & Electric Drives Lab (APEDL) 2 Overview • What is Lenze? • What do they want? 11/12/2015 Copyright © 2015 – Advanced Power Electronics & Electric Drives Lab (APEDL) 3 Overview: Test Setup 4 Overview: Objectives • Primary: • Secondary: • Tertiary: 5 Overview: Desires 6 Solution: Ideal User HMI w/ Program HMI Visual Basic GUI with Modbus Communication User Interaction Advantages • • • • • • Communication (ModBus) Touchscreen Possibly all Lenze product No need for PLC More direct communication Use of Modbus reduces complexity Visual Basic is supported Disadvantages • Switcher Drive Control And Sensor Feedback (Ethernet) Motor Inverter The use of the HMI adds complexity Drive Control And Sensor Feedback (Ethernet) Test Motor Dynometer Dynometer Inverter 7 Solution: Alternative User Computer w/ Program Computer GUI with DAQ and Analog/Digital Communication User Interaction Communication (ModBus) Advantages Drive Control And Sensor Feedback (A/D) PLC w/ A/D inputs and DAQ outputs Drive Control And Sensor Feedback (A/D) • • • • No need for Ethernet Switch Can use standard drive A/D ports Computer supports wide variety of GUI options External current sensing feasible Disadvantages • • Motor Inverter Test Motor Dynometer More hardware is needed Less Lenze components and no HMI Dynometer Inverter 8 Other Feasible Solutions User Computer w/ Program Computer GUI with PLC Control and Analog/Digital Communication User Interaction Communication (ModBus) Advantages Drive Control And Sensor Feedback (A/D) PLC w/ A/D inputs and outputs Drive Control And Sensor Feedback (A/D) • • • No need for Ethernet Switch Can use standard drive A/D ports Computer supports wide variety of GUI options Disadvantages • • Motor Inverter Test Motor Dynometer May need external signal conditioning components PLC needs more A/D inputs and outputs making it more costly Dynometer Inverter 9 Other Feasible Solutions User Computer w/ Program Computer GUI with PLC Control and Modbus Communication User Interaction Communication (ModBus) Advantages • PLC w/ Ethernet • Modbus Computer supports wide variety of GUI options Use of Modbus protocol throughout the design reduces design complexity Disadvantages • Switcher Drive Control And Sensor Feedback (Ethernet) Motor Inverter Communication rate between the computer and drives is slower Drive Control And Sensor Feedback (Ethernet) Test Motor Dynometer Dynometer Inverter 10 Other Feasible Solutions User Computer w/ Program Computer GUI with Modbus Communication User Interaction Advantages • Communication (ModBus) • • • Computer supports wide variety of GUI options No need for PLC More direct communication Modbus reduces complexity Disadvantages • Switcher Drive Control And Sensor Feedback (Ethernet) Motor Inverter Drive Control And Sensor Feedback (Ethernet) Test Motor Dynometer More extensive communication programming computer Dynometer Inverter 11 Other Feasible Solutions User HMI w/ Program User Interaction HMI GUI with PLC Control and Modbus Communication Communication (ModBus) Advantages PLC w/ Ethernet • • • Touchscreen Possibly all Lenze product Use of Modbus reduces complexity Modbus Disadvantages • • HMI does not support as may GUI options Communication rate between the HMI and drives is slower Switcher Drive Control And Sensor Feedback (Ethernet) Motor Inverter Drive Control And Sensor Feedback (Ethernet) Test Motor Dynometer Dynometer Inverter 12 GUI Programs 4/9/2014 Copyright © 2014 – Advanced Power Electronics & Electric Drives Lab (APEDL) 13 Visual Basic Pros • Visual Basic 6.0 is free to download. • Capable of object oriented programming. • Free MODBUS toolkit. • Links directly to MS Excel: beneficial for creating nice looking graphs. • Can run on Windows CE. • Lenze team can continue software support for free 14 Visual Basic Cons • CANopen communication is not well supported. • Our team does not have experience with this program. • No longer supported by Microsoft 15 LabVIEW Pros • Well supported by NI • Free MODBUS library • Our team has experience with this program. • Possibility of HMI support • NI DAQs are very easy to implement 16 LabVIEW Cons • CANopen library cost $162 • LabVIEW is no longer supported for Windows CE. • Lenze team would need to purchase LabVIEW licenses to continue support of the program 17 LabVIEW GUI: Basic Tests 18 LabVIEW GUI: Basic Tests 19 LabVIEW GUI: Basic Tests 20 LabVIEW GUI: Periodic Tests 21 LabVIEW GUI: Periodic Tests 22 LabVIEW GUI: Periodic Tests 23 LabVIEW GUI: Real Time Tests 24 HMI • Lenze HMIs are p500 and p300 • Operating system is Windows CE • Equipped for MODBUS communication • Designed for PLC control. • Potentially could control the drives directly from GUI program 25 PLC • The PLC is a well supported control for the drives and can communicate with the Lenze HMI. • Possibly redundant, and unneeded. • Adds complexity, but may prove necessary if MODBUS or CAN does not work. 26 MODBUS • Modbus only requires Ethernet ports • Supported by free libraries. • Well documented • Lower communication rate. • Dependent on Ethernet cable 27 CANopen • Faster communication rate • Requires a CANopen reader card or dongle • Libraries cost money • Less supported than MODBUS in most cases 28 Analog/Digital • Requires the use of a data acquisition module (DAQ) • Fast communication • Will integrate well with additional external sensors such as per phase current sensors. • Requires less software development 29 Torque Estimation • Motor Stator Flux • 𝒅𝝋𝒔 𝒅𝒕 = 𝑽𝒔 − 𝑹𝒔𝒊𝒔 • Torque Calculation: • 𝑻𝒆 = 𝟑 𝒑(𝒊𝒔 × 𝟐 𝝍𝒔) 𝝍𝒔 = flux 𝑽𝒔 = voltage 𝑹𝒔= resistance 𝒊𝒔 = current 𝑻𝒆 = torque 𝒑 = pole pairs 30 Deliverables Minimum Deliverables Target Deliverables Computer A/D Control of i500 and EVS 9329 Drives HMI/MODBUS Control of i500 and EVS 9329 Drives Torque Estimation from Drive Sampled Data Torque Estimation from Drive Sampled Data Speed from Resolver Data (Servo Motor) Compare Commanded Torque from Servo Real Time Load Manipulation Speed from Resolver Data (Servo Motor) Output .csv data for external processing Real Time Load Manipulation User Defined Load Profile Inputs Output .csv data for external processing Embedded Figure Generation 31 Budget - Ideal Item Cost P500 HMI TBD Power Cable Sub-Total Vendor 1 TBD CFI $12.25 2 $24.50 Grainger CAT 5 Cable $7.80 2 $15.60 Amazon Twist-Locks $34.00 2 $68.00 Hubbell USB Cable $4.99 1 $4.99 Amazon Total Quantity $113.09 32 Budget – A/D Circuit & DAQ Item Cost Quantity Sub-Total Vendor NI DAQ $329.00 1 $329.00 NI USB Cable $4.99 1 $4.99 Amazon Resistors Kit $7.99 2 $15.98 Mouser Op-Amps 10 $7.00 Mouser Vector Board $6.46 4 $25.84 Mouser Wire 10 $2.90 Mouser $0.70 $0.29 Total $385.71 • Total: $385.71+ 10% for shipping and taxes • Total:$113.09 + 10% for shipping and taxes Will be considerably higher with HMI. 33 Schedule Overview Date Milestone Milestone 1/19/2016 11/5/2015 3/1/2016 11/8/2015 3/10/2016 11/6/2015 3/12/2016 11/12/2015 4/15/2016 11/20/2015 4/25/2016 Spring Semester Begins Complete Research Complete first draft of Design Present proposal to Lenze Present design to Lenze Design Proposal Midterm Design Review Design Review Finish Final Design Decide route Finish design Paperwork 5/1/2016 11/14/2015 Project Submission Thanksgiving break begins 11/28/2015 Thanksgiving break ends 12/4/2015 Gather all necessary Components 12/11/2015 Complete test setup 12/20/2015 Winter Break Begins Legend Completed Design Milestones UCONN submissions 34 Questions? 35 References [1]F. Assurance, A. Converter, F. Assurance, D. #200421, D. sensor, B. converter, 1. CS5503-AP DIP Low-Cost, 1. #090421, 1. #200421, 5. #090421, 5. ROLLING DIGITAL MAP MEASURING READER TOOL SCALE READING TOOL TRACER CONVERTER, 5. #090421 and L. module, 'Popular Free Measurement Converter-Buy Cheap Free Measurement Converter lots from China Free Measurement Converter suppliers on Aliexpress.com', Aliexpress.com, 2015. [Online]. Available: http://www.aliexpress.com/popular/free-measurement-converter.html. [Accessed: 13- Nov- 2015]. [2] Lenze.com, 'Controls - Lenze in the Americas. As easy as that.', 2015. [Online]. Available: http://www.lenze.com/enus/products/controls/. [Accessed: 13- Nov- 2015]. [3] Msdn.microsoft.com, 'Visual Basic', 2015. [Online]. Available: https://msdn.microsoft.com/en-us/library/2x7h1hfk.aspx. [Accessed: 13- Nov- 2015]. [4] Ni.com, 'LabVIEW System Design Software - National Instruments', 2015. [Online]. Available: http://www.ni.com/labview/. [Accessed: 13- Nov- 2015]. [5] Modbus.org, 'The Modbus Organization', 2015. [Online]. Available: http://www.modbus.org/. [Accessed: 13- Nov- 2015]. [6] Canopen-solutions.com, 'CANopen – Vector's Comprehensive Tool Chain', 2015. [Online]. Available: http://www.canopen-solutions.com/?gclid=CIKr7YO3gskCFdgagQodCK4AMg. [Accessed: 13- Nov- 2015]. [7] MESSAOUDI,, Mustapha, Habib KRAIEM,, Mouna BEN HAMED, Lassaad SBITA, and Mohamed Naceur ABDELKRIM. "A Robust Sensorless Direct Torque Control of Induction Motor Based on MRAS and Extended Kalman Filter." Leonardo Journal of Sciences 12 (2008): 35-56. Web. 12 Oct. 2015 36