PPT
advertisement

Segmentation and Perceptual Grouping
The problem
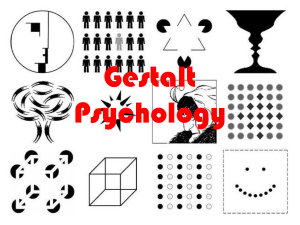
Gestalt
Edge extraction: grouping and completion
Image segmentation
Camouflage
Kanizsa Triangle
The image of this cube contradicts the optical image
Perceptual Organization
Atomism, reductionism:
Perception is a process of decomposing an
image into its parts.
The whole is equal to the sum of its parts.
Gestalt (Wertheimer, Köhler, Koffka 1912)
The whole is larger than the sum of its parts.
Mona Lisa
Mona Lisa
Gestalt Principles
Proximity
Gestalt Principles
Proximity
Similarity
Gestalt Principles
Proximity
Similarity
Continuity
Gestalt Principles
Proximity
Similarity
Continuity
Closure
Gestalt Principles
Proximity
Similarity
Continuity
Closure
Common Fate
Gestalt Principles
Proximity
Similarity
Continuity
Closure
Common Fate
Simplicity
Smooth Completion
Isotropic
Smoothness
Minimal curvature
Extensibility
Elastica
E () min k ( s)ds
2
Elastica is not scale invariant
l l , k
E ()
1
E ( )
k
Elastica
Scale invariant measure
Ei () min l k (s)ds
2
Approximation
Ei () 4( 1 2 )
2
1
1
2
2
2
Finding lines from points
Parametric methods: RANSAC
RANSAC
RANdom SAmple Concensus
Complexity:
Need to go over all pairs: O(n2)
For each pair check how many more points are
consistent: O(n)
Total complexity: O(n3 )
RANSAC
Another application of RANSAC:
Find transformation between images
Example: compute homography
Compute homography for every 4 pairs of
corresponding points
Choose the homography that best explains the
image
m4n4 sets should be tested
Another example: compute epipolar lines
How many correspondences are needed?
Hough Transform
Hough Transform
Linear in the number of points
Describe lines as
y mx n
Or better
Prepare a 2D table
x cos y sin c
c
θ
Hough Transform
c
+1
+1
+1
+1
+1
θ
Hough Transform
c
13
16
θ
What if we want to find circles?
Curve Salience
Saliency Network
Encourage
Length
Low curvature
Closure
Saliency Network
Tensor Voting
Every edge element votes to all its circular edge
completions
Vote attenuates with distance: e-αd
Vote attenuates with curvature: e-βk
Determine salience at every point using principal
moments
Tensor Voting
Stochastic Completion Field
Random walk:
x cos
y sin
N (0, 2 )
In addition, a particle may die with probability:
e
1/ r
Stochastic Completion Fields
Stochastic Completion Fields
Most probable path:
k 2 ( s )ds ds
with
1
2
1
log( 2 )
r
2
Can be implemented as a convolution
Stochastic Completion Fields
Stochastic Completion Fields
Snakes
Given a curve Г(s)=(x(s),y(s)), define:
1
E (( s ))ds
with
0
E (( s )) Eimage Eint Eext
Eimage I ( x, y )
( s) 2
Eint ( s )
s
s
2
Eext ...
2
2
Extremum: Calculus of Variation
Given a functional
T
x s E ( x, x)ds
0
A condition for a local extrimum is obtained using the
Euler-Lagrange equation
x E d E
0
x( s) x ds x
Curve evolution is defined
x( s, t ) E d E
0
t
x ds x
Solution obtained when
x( s, t )
0
t
Curve evolution
Level Set Methods
S ( x, y; t )
Curve defined implicitly
by S ( x, y; t ) 0
Curve Evolution
Curve Evolution
Shortest Path
Image Segmentation: Thresholding
Histogram
1200
1000
800
600
400
200
0
0
50
100
150
200
250
Thresholding
Thresholding
125
99
156
S-T Min-Cut/Max Flow
S-T Min-Cut/Max Flow
t
S
Normalized Cuts
Given a graph G=(V,E), define
W = {wij} weights
D = diag{di}, di wij
j
L = D - W Laplacian
Let V A B, we seek to solve
cut ( A, B)
cut ( A, B)
min
assoc( B,V )
V A B assoc ( A, V )
Normalized Cuts
This can be show to be equivalent to
T
u Lu
min T
u u Du
with
1
ui k
1 k
vi A
vi B
and u T D1 0
With these constrains the problem is NP-hard.
Without the constraint the solution is obtained
through the generalized eigenvalue problem
Lu Du
Normalized Cuts
Dividing into two segments:
Partition determined by the eigenvector with the
second smallest eigenvalue
We need to pick a threshold
Dividing into more than two segments:
Pick several thresholds.
Divide each segment recursively.
Pick the best few eigenvectors and then perform
k-means.
Texture Examples
Filter Bank
Textons
image
textons
texton
assignment
Normalized Cuts
Mean Shift Segmentation
Mean Shift Segmentation
Given an image, convert it to a function that is
inversely related to edgeness
Perform mean shift from every pixel
Cluster pixels that lead to the same peak
Mean Shift Segmentation
Summary
Local processing is often insufficient to separate
objects
We reviewed several approaches for
curve extraction, completion
region segmentation
Preattentive: Parallel
Preattentive: Parallel
Attention: Serial