Technical Conference Publication - EDGE
advertisement

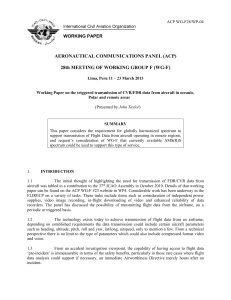
Multi-Disciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 10232 UAV AIRFRAME C PLATFORM FOR AERIAL IMAGING Daniel Graves (ME) – Project Lead Alex Funiciello (ME) James Reepmeyer (ME) – Lead Engineer Michael Hardbarger (ME) Brian Smaszcz (ME) ABSTRACT Cd – coefficient of drag Airframe C is a second generation large scale remotecontrol aircraft aimed at carrying a multi-spectral imaging package. Airframe C’s goal is to carry a 15 pound package for a 20 minute flight. Building on progress made by the Airframe B design team, Airframe C proceeded with special focus on the wing structure. After selecting a stronger wing structure along with other design improvements Airframe C was successfully completed and flown on April 29th, 2010. Airframe C successfully took aerial pictures on May 7th, 2010 at North Hampton airfield. Due to weather and time constraints neither the maximum flight time nor the maximum payload could be tested directly; however non-flight testing and simulations demonstrate the ability for greater than 20 minute flight duration and a maximum payload in excess of 15 minutes. Chord – Length between the leading edge and the trailing edge of the airfoil Cl – coefficient of lift Curb weight – the weight of the finished vehicle in its fully assembled form including fuel, oil, etc, but not including any cargo. ESC – Electronic Speed Controller FoilSim – Airfoil analysis software ID – Internal Diameter LiPo – Lithium Polymer Battery NOMENCLATURE MSD – Multiple Disciplinary Senior Design AoA – angle of attack NACA – National Aeronautics Aspect Ratio – The length of the wing in relation to the chord Advisory Committee for OD – Outer Diameter Prop-strike – When the propeller of an airplane strikes the ground on takeoff or landing CA – Cyanoacrylate (adhesive) Camber – The asymmetry between the top curve and bottom curve of the airfoil RC – Radio Controlled Copyright © 2010 Rochester Institute of Technology RIT – Rochester Institute of Technology Selig – A common airfoil standard UBEC – Battery Elimination Circuit attachment. It is believed that large wing deflections inhibited control authority of the control surfaces, limiting the pilot’s ability to fly the aircraft. Xfoil - Airfoil analysis software Analysis of the design and construction of Airframe C confirmed these concerns regarding the wing. The fiberglass antenna mast used as the main wing spar was found to be insufficient for use as a structural element. The wing box and mating surfaces between the wing sections, constructed from balsa wood, were found to be insufficient to handle flight loading. Furthermore the body structure of Airframe B was excessive, leading to increased aircraft weight and additional strain on the wing. INTRODUCTION CUSTOMER SPECIFICATIONS Airframe C is a second generation airframe developed as part of the Open Architecture, Open Source Unmanned Aerial Imaging Platform project; a 5 year research program working towards the ultimate goal of delivering an unmanned aerial imaging platform. The end goal of this family of projects is to create an airplane capable of fully autonomous flight. This airplane will have the ability to carry a variety of imaging packages as well as navigation, control, and telemetry data. Potential applications of such aircraft include thermal (infrared) imaging of forest fires to aid in identifying hot spots, infrared imaging of nuclear power plants to detect leaks or areas with insufficient shielding, multi-spectral aerial surveying of both urban and wild land environments, and aiding in search and rescue operations. Infrared cameras, as well as multispectral imaging equipment are substantially heavier and larger than standard imaging equipment. A standard model airplane does not possess the payload capabilities to support such imaging systems. The primary goal of building this plane was to carry a 15 pound payload in stable flight. In order to provide time to take pictures of a given target in multiple passes as well as travel time to and from the target and runway a target flight time of 20 minutes was set. In order to trigger the camera it was necessary to have a radio controlled interface with the payload of the plane. Finally, Airframe C is meant to be an open source, open architecture platform capable of carrying and interfacing with current and future payloads including a variety of cameras and telemetry packages. Wing Root – The section of the wing which is joined to the fuselage of the aircraft Wingspan – Tip to tip distance off the wing XFLR5 – Airfoil analysis software The P10232 UAV Airframe C project continues the efforts of P09232 UAV Airframe B MSD design team. Airframe B was the first attempt at constructing and testing a large scale airframe. Airframe C, like Airframe B, focuses on the development of the Aircraft itself, not the telemetry, control, or camera packages associated with the aircraft. PREVIOUS RESULTS The P09232 team completed construction of UAV Airframe B in the spring of the 2008-2009 academic year. Airframe B had a 13 foot 3-piece wing and had a curb weight of approximately 42 pounds. Airframe B did not successfully complete its first flight; crashing moments after it suffered from wing separation 18 seconds into the maiden voyage. There were many factors attributing to the crash. The most significant factors were related to concerns about the bending moment of the wing, wing deflection, and wing DESIGN Wing Design Airframe C’s wing design focused on overcoming the issues associated with Airframe B’s design flaws. In order to reduce the bending moment at the wing root generated by lift, the design focused on reducing the wingspan. In order to accomplish the reduction in wingspan while maintaining the same amount of lift at similar speeds a new airfoil shape was needed. From research on model planes from sources such as airfield models[1] and discussion with members of the model airplane community including the Radio Control Club of Rochester and the RIT Aero Club, it was determined that an aspect ratio less than 8 is preferred as enables sufficient space within the wing for structural materials. An aspect ratio of 7.5 was selected as a base point for further wing analysis. Using FoilSim it was discovered that a highly cambered airfoil was capable of meeting all the desired design constraints. Several airfoils were analyzed in XFLR5 and finally a NACA 9412 airfoil was selected. Proceedings of the Multi-Disciplinary Senior Design Conference Page 3 Figure 1: NACA 9412 Profile In comparison to the Selig 7055 airfoil used on Airframe B, the new airfoil has more camber at 9% with an under camber design instead of a flat bottom airfoil. The camber on the NACA 9412 airfoil generates more lift at a given angle of attack and speed than the non-cambered Selig 7055 at the cost of increased drag and pitching moment. Although the new airfoil selection increases drag, it allows for a decreased wing size. Airframe B’s wing measured 13 feet by 18 inches while the new airfoil selection allowed the wing dimensions were reduced to 10feet by 16 inches. This leads to a decreased aspect ratio from 8.67 to 7.5. More importantly it was determined that the bending moment at the wing root was reduced from an average of 57 ft-lbf to 44 ft-lbf when generating 40 lbs of lift. While the wing root loading has been reduced there is still a significant bending moment to account for. A variety of materials were considered for use as wing spars. Carbon Fiber Tubing was selected as the material of choice for its strength per cross sectional area as well as its strength per weight. For the main spar, a Carbon Fiber tube with an 0.75” OD and 0.625” ID was chosen, with a supporting backspar of 0.575” OD and 0.5” ID. To assist in resisting the deflection cause by flight loading, the wing was sheeted with 1/32” balsa, then epoxied over with a single fiberglass sheet. Although the NACA 9412 airfoil creates more drag than the Selig 7055 airfoil, the reduction in wing size lead to an average drag increase of just 1 lbf at 40lbf of lift. The optimal cl/cd ratio is achieved at approximately 41 mph. In order to cruise at this speed it is necessary for the wing to be at approximately a 2 degree angle of attack. In order to provide the best possible imaging platform the wing is placed on the body of the plane at a 2 degree inclination to allow the plane to cruise level. Figure 2: Cl vs. AoA Comparison of Airfoils Tail Design The pitching moment generated by the cambered airfoil is countered by using a negative lifting tail. Although the tail’s airfoil is symmetrical (NACA 0408) and does not provide lift on its own the entire tail has been placed at a negative 4 degree angle of attack. Analysis of the wing and tail combination in XFLR5 has determined that this angle yields a zero pitching moment in flight. Using the following equations found in Raymer’s Aircraft Design: A Conceptual Approach 𝑐𝑉𝑇 ∗ 𝑏𝑊 ∗ 𝑆𝑊 𝑆𝑉𝑇 = 𝐿𝑉𝑇 𝑐𝐻𝑇 ∗ 𝐶𝑊 ∗ 𝑆𝑊 𝑆𝐻𝑇 = 𝐿𝐻𝑇 where Cvt is the vertical tail chord, bw is the wing span, Svt is vertical tail area, Lvt is the length form ¼ chord to the vertical tail, Cht is the chord of the horizontal tail, Sw is the wing area, Lht is the length from the ¼ chord to the horizontal tail; it was determined that the horizontal tail surface of 2.222 feet2 and a vertical tail surface of 1.333 feet2 were desired. A horizontal tail length of 4 feet was selected semi-arbitrarily (partially due to aesthetic concerns) which meant the chord would be 7.5 inches to achieve the desired area. Similarly the vertical tail was chosen to be a 16 by 16 inch triangle with a 4 by 16 inch rudder. Figure 3: XFLR 5 Analysis of Plane Body/Wing Copyright © 2010 Rochester Institute of Technology Control Surfaces Utilizing industry standards from Raymer the aileron, elevator, and rudder surface areas were calculated. The rudder was chosen to be 40% of the vertical tail chord, or 3.2 inches, and spans the entire height of the vertical tail. Ailerons were designed to be 50% the length of the wingspan, and thus were designed to be 2.5 inches long. On the horizontal tail it was determined that the elevator would have a chord of 3.375 inches and span 3.6 feet (90% of the tail span). Analysis of the control surfaces in XFLR5 verified the elevators maintained control authority of the aircraft in the presence of the pitching moment created by the wing. At lower speeds the elevators are capable of overcoming the pitching moment at ½ their maximum travel, ensuring that there remains more travel for increased lift. Finally it was confirmed through a static analysis that standard servos would have sufficient torque to maintain control authority over control surfaces. Propulsion and Electronics The UAV Airframe B team completed a propulsion assessment while designing Airframe B and concluded that for their flight time of 1 hour an electric propulsion system was infeasible. For airframe C the target flight time was reduced to 20 minutes which is achievable utilizing an electric propulsion system. Electric propulsion systems offer many benefits over fuel based propulsion systems including significantly reduced vibrations, and increased reliability. In order to verify the validity of the electronic propulsion system it was first necessary to assess the size of the motor required. Using a model aircraft rule of thumb it was determined that an airplane requires 50 watts per pound minimum in order to take off. It is further recommended that 75 watts per pound be available to provide the plane with ‘trainer like performance’. For a target aircraft gross weight of 40 pounds it was determined that the a minimum of 2000 watts were necessary for take-off and 3000 watts would be preferred for ‘trainer-like’ performance. A simplified take off model was created in Simulink. The model accounts for increases in drag due to air resistance and rolling resistance. Air drag was approximated from data obtained from XFLR5. Rolling resistance was obtained experimentally by mounting the landing gear to a board, attaching weights, and recording the force required to pull the assembly through a grass field. The thrust developed by the motor was calculated using the equation 𝑚𝑜𝑡𝑜𝑟 𝑝𝑜𝑤𝑒𝑟 ∗ 𝑝𝑟𝑜𝑝𝑒𝑙𝑙𝑒𝑟 𝑒𝑓𝑓𝑖𝑐𝑒𝑛𝑐𝑦 𝑇ℎ𝑟𝑢𝑠𝑡 = 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦 It is important to note that this equation does not hold for near zero velocities. Therefore a saturation limit was used on the motor torque output. This saturation limit was estimated for initial testing. It was determined using the model that a static thrust limit of 20 pounds would be sufficient to ensure takeoff. Testing has since proven our propulsion system capable of producing 26 pounds of static thrust. After takeoff the model assumed an 8 degree climb angle from the ground to a cruising altitude of 1000 feet. In the simplified version of the model it assumed the motor would be pulling its maximum current for the entire takeoff and climb procedure. Power draw at cruise was estimated using the equations 𝑤𝑒𝑖𝑔ℎ𝑡 𝑑𝑟𝑎𝑔 = 𝑐𝑙/𝑐𝑑 𝑑𝑟𝑎𝑔 ∗ 𝑠𝑝𝑒𝑒𝑑 ∗ 1/𝑒𝑓𝑓𝑖𝑐𝑒𝑛𝑐𝑦 𝑖= 𝑠𝑦𝑠𝑡𝑒𝑚 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 By then multiplying the current draw by time the total power requirement can be computed. Through experimentation with the model it was determined that 10000 mAh of battery power would be necessary to meet the flight time requirement. With this power requirement in mind batteries were selected. Lithium Polymer (or LiPo) batteries were chosen for their capacity to rate ratio and affordability. It was decided that the plane would fly using a combination of 4 batteries (2 in series, 2 pairs in parallel). The batteries used are Zippy Flightmax 5s 15c 5000mAh batteries. Each battery would provide 18.5 volts at a continuous discharge rate of 75 amps. After selecting the batteries a motor in the given power range was identified. A Turnigy Aerodrive XP Sk seris 63-74 Brushless motor was paired with a Turnigy Sentilion 100A HV 5-12s BESC speed controller. A Turnigy 5-7A HV UBEC for LiPo was purchased in place of a receiver battery to save weight. The servos controlling the ailerons, elevators, and rudder are Futaba s3004 servos. These were selected for their price and availability. The receiver and transmitter were re-used from Airframe B. The radio is a 6 channel digital proportional system. Since 5 channels are necessary for the ailerons, flaps, elevator, throttle, and rudder there is a remaining channel that can be used to interface with on board payload. Proceedings of the Multi-Disciplinary Senior Design Conference Page 5 to aiding manufacturing this modular design offers break away points in case of a crash. Rather than having the plane suffer from catastrophic damage upon impact the aircraft body will separate, containing the damage into more easily repairable sections. The cost of this modularity is a decrease in overall plane structural rigidity, which was deemed to be an acceptable design consideration. Figure 4: Propulsion System on Test Stand Airframe Design The goal of designing Airframe C’s main structure was to reduce the weight of the main airframe configuration without sacrificing the structure’s rigidity and resistance to impact. The majority of the research completed for this aspect of the project was done while auditing a test run class for model plane building, taught by an RIT Aero Club member and Mechanical Engineering graduate student, Shawn O’Neil. Through the analysis of construction procedures, review of different model plane structures, and taking the advice of club members we began the process of modeling what would be our open architecture airframe. The entire structure was designed to be able to fit together like a large 3D jig saw puzzle, as well as be modular to allow for multiple stage construction. The airframe modules consist of: the front battery bay module, the landing gear box module, the camera bay/wing box attachment module, and the tail section. The main structure of the airframe was created from .25” (.233” actual) Baltic Birch plywood which was laser cut by Foxlite Inc. The Baltic Birch ply created the main skeleton of the airframe which was then connected together by Balsa wood stringers. The tail of the airframe, which consists of nothing but consecutive Baltic Birch bulkheads connected by stringers, was constructed per the CAD model dimensions using a precision fixture. The fixture held the bulk head to bulk head distance while the center line of each bulk head was aligned by sight. Once positioned correctly in the mold, the stringers were added and glued in place using CA adhesive. The battery bay, landing gear box, camera bay, and tail were all constructed separately and then joined together once the entire structure was ready to be assembled. RESULTS AND DISCUSSION While Airframe C was under construction the electronic and propulsion sub-systems were analyzed on a test stand. The propulsion system was found to deliver a peak static thrust of roughly 26 pounds. The selected batteries were proven capable of delivering full throttle power to the motor for approximately 10 minutes when under static loading. This test data was then used to update the model parameters and it was concluded that the propulsion system would provide sufficient power for takeoff and the batteries would provide sufficient power for the flight duration. Assembly of Airframe C was completed on Saturday, April 24th 2010 with initial aircraft testing that afternoon. Several successful attempts at taxing the aircraft around a grass airfield were performed to gather data on ground testing. After several common ground maneuvers such as S-Bends and 180° turns as well as straight line taxi attempts, it was determined that the airframe had sufficient ground control and was ready for skip testing. Figure 5: CAD Model Assembly The design started with the main focus of the camera holding bay and wing mount system and was modeled outward from there. Each module was connected to one the adjacent module by mating the stringers into the bulkhead of the adjoining bulkheads. In addition Three skip tests (low power, low altitude flight) were performed that afternoon into a slight headwind of 5 MPH. On the first attempt, the plane was throttled up until both wheels left the ground, but significant roll was observed. A second skip test was executed where the plane taxied straight and level until it briefly lifted Copyright © 2010 Rochester Institute of Technology from the ground. On the attempt, the plane flew straight and level until the engine throttle was cut and the aircraft descended back onto the field. A third and final skip test was attempted; however a strong gust of wind occurred immediately prior to takeoff, resulting in the plane gaining approximately 10 feet in altitude. Initially the engine throttle was cut in an attempt to force the plane into a glide back to the ground. On approach, the wing tip stalled out creating a right roll moment on the aircraft which was corrected by throttling the motor and introducing aileron. Control was restored to the aircraft once the motor was reengaged and the aircraft landed on the field. Upon review, it was determined that during normal fullthrottle take-off, wing stall would be avoided and the gain in attitude would provide sufficient time to correct and control the aircraft during gusting winds. creating excess lift. On the third landing attempt, the aircraft was brought down at a more aggressive angle to reduce the lift and put the plane onto the landing strip. While descending at a negative angle-of-attack, a strong gust of wind struck the top surface of the wing, forcing the plane into the ground rapidly. The nose of the aircraft and landing gear impacted the ground and caused the fuselage to separate into three pieces. The propeller, motor mount, and battery bay of the fuselage were damaged beyond repair. The landing gear mounting bay, wing, wing box, and tail section incurred only minor damage from the incident. A detailed incident report is also available on the P10232 EDGE website. Figure 7: Moment of Impact During First Landing Figure 6: Initial Flight During Skip Test On Thursday, April 29th 2010, Airframe C was taken out to the Hasman Airfield in Spencerport, NY for full flight testing. The aircraft was assembled on-site and ready to fly in approximately fifteen minutes. At 9:30 am, the controls were turned over to Trevor Ewell and the decision was made to begin flight trials in a 10 MPH head wind. After taxi testing on the airfield, the tail servo malfunctioned resulting in loss of ground maneuverability. The cause for this was later determined to be gear jamming in the servo, most likely cause from the stress fracture of an internal gear. The tail wheel was fixed into position, and flight testing continued. After two attempted skip flights which were hampered by prevailing crosswinds, it was determined that the best course of action was to throttle the airplane to full and attempt a full take-off. On take-off, the airplane was throttled to full and left the runway after approximately 15 feet of foreward travel. Ewell brought the plane to flight altitude and proceeded to make several circuits around the airfield while trimming the aircraft. After about five minutes of flight, the aircraft was brought down to make landing passes. The first two passes were aborted by the pilot due to the gusty conditions which were The aircraft was returned to full flight capability as of May 6th, 2010. The battery box was re-ordered from Foxlite and over-nighted. A new propeller, balsa wood stringers, and landing gear servo were purchased locally and installed. As per the test pilot’s request the control surfaces were re-trimmed to suit his preferences. Figure 8: Airframe C in Flight On May 7th 2010 Airframe C was once again turned over to Trevor Ewell, this time at North Hampton Airfield in Spencerport, NY. After the plane was assembled and a camera system mounted, a successful flight of approximately 4 minutes and 30 seconds was completed at approximately 10am that morning. This Proceedings of the Multi-Disciplinary Senior Design Conference time the landing was smooth and no damage was done to the plane. Unfortunately the on-board camera malfunctioned and failed to capture any images during the flight. After addressing the issues with the camera payload the plane was sent out for a second flight. This flight had a smooth takeoff and successfully captured several images while in flight. While landing the aircraft was running out of runway and the pilot was forced to make a more aggressive landing, resulting in a prop strike. Upon inspection there was no disruption to the payload and the majority of the aircraft was untouched. There was minimal damage to the front of the battery box where the motor mount connected to the airframe, however this damage was minimal and the bulkhead can be repaired instead of being replaced. Page 7 Acknowledgments P10232 would like to thank; Michael Koelemay along with Impact Technologies LLC for their support and sponsorship of the project. Dr. Jason Kolodziej and Philip Bryan for their guidance throughout the span of the project. Shawn O’Neil and the RIT Aero Club for advice and assistance on the aircraft design. Joe Pinzone and P10236 team for their DAQ device and help with motor testing. Our test pilot Trevor Ewell for flying our airframe and design suggestions. The Radio Control Club of Rochester for allowing us use of their private airfield, as well as their encouragement, and advice. Jim Capuano for recording the flight videos, as well as posting them for viewing. Fox Lite, inc. for laser cutting our parts. Eric Irish, Elyssa Raspaut, and Tristram Coffin for taking some excellent pictures. Figure 9: Aerial Image of P10232 Team REFERENCES [1] Johnson, P. K., 2002, Airfield Models, April 30, http://airfieldmodels.com/ [2] Raymer, D. P., 2006, Aircraft Design: A Conceptual Approach, American Institute of Aeronautics and Astronautics. [3] Reyes, C., 2009, Rcadvisor's Model Aircraft Design Made Easy, RCadvisor.com. [4] Schleicher, R., 2005, "How to Build and Fly Electric Model Aircraft," MBI Publishing Company, St. Paul, Minnesota. [5] Theunissen, D., 2010, Fly Electric, April 30, http://www.flyelectric.ukgateway.net/ [6] Weiss, M., Flutter, http://www.giantscaleplanes.com/flutter.htm Copyright © 2010 Rochester Institute of Technology