CSC 430: Basics of Algorithm Analysis
advertisement

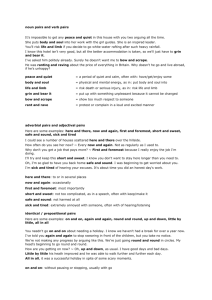
CSC 430: Basics of Algorithm Runtime Analysis 1 What is Runtime Analysis? • Fundamentally, it is the process of counting the number of “steps” it takes for an algorithm to terminate • “Step” = primitive computer operation – – – – Arithmetic Read/Write memory Make a comparison … • The number of steps needed depends on: – The fundamental algorithmic structure – The data structures you use 2 Other Types of Algorithm Analysis • • • • • Algorithm space analysis Approximate-solution analysis Parallel algorithm analysis A PROBLEM’S run-time analysis Complexity class analysis 5 Runtime Motivates Design • Easiest Algorithm to implement for any problem: Brute force. – check every possible solution. – Typically takes 2N time or worse for inputs of size N. – Unacceptable in practice. • Usually, through insight, we can do much better • What do we mean by “better”? 6 Worst-Case Analysis • Best case running time: – Rarely used; often superfluous • Average case running time: – Obtain bound on running time of algorithm on random input as a function of input size N. – Hard (or impossible) to accurately model real instances by random distributions. – Acceptable in certain, easily-justified scenarios • Worst case running time: – Obtain bound on largest possible running time – Generally captures efficiency in practice. – Pessimistic view, but hard to find effective alternative. 7 Defining Efficiency: Worst-Case Polynomial-Time • Def. An algorithm is efficient if its worst-case running time is polynomial or better. • Not always true, but works in practice: – 6.02 1023 N20 is technically poly-time – Breaking through the exponential barrier of brute force typically exposes some crucial structure of the problem. – Most poly-time algorithms that people develop have low constants and low exponents (e.g., N1 N2 N3). • Exceptions. – Sometimes the problem size demands greater efficiency than poly-time – Some poly-time algorithms do have high constants and/or exponents, and are useless in practice. – Some exponential-time (or worse) algorithms are widely used because the worst-case instances seem to be rare. simplex method Unix grep 9 2.2 Asymptotic Order of Growth 11 What is Asymptotic Analysis • Instead of giving precise runtime, we’ll show that algorithms are bounded within a constant factor of common functions • Three types of bounds – Upper Bounds (never greater) – Lower Bounds (never less) – Tight Bounds (Upper and Lower are same) 12 Growth Notation • Upper bounds (Big-Oh): – T(n) O(f(n)) if there exist constants c > 0 and n0 0 •such Frequently that for allabused n n0 wenotation: have T(n) c · f(n). • T(n) = O(f(n)). • Lower bounds (Omega): – Asymmetric: – T(n) (f(n)) if there exist constants c > 0 and n0 0 3 2 f(n)all= n5n ;ng(n) =have 3n T(n) c · f(n). such that•for we 0 • f(n) = O(n3) = g(n) • but f(n) g(n). • Tight bounds (Theta): • Better notation: O(f(n)). – T(n) (f(n)) if T(n) is T(n) both O(f(n)) and (f(n)). 13 Use-Cases • Big-Oh: – “The algorithm’s runtime is O(N lgN), a potential improvement over prior approaches, which were O(N2).” • Omega: – “Their algorithm’s runtime is (N2), which is worse than our algorithm’s proven O(N1.5) runtime.” • Theta: – “Our original algorithm was (N lgN) and O(N2). With modifications, we were able to improve the runtime bounds to (N1.5)” 80000 70000 60000 50000 N^2 40000 Nlgn N^1.5 30000 20000 10000 0 0 50 100 150 200 250 300 14 Properties • Transitivity. – If f O(g) and g O(h) then f O(h). – If f (g) and g (h) then f (h). – If f (g) and g (h) then f (h). • Additivity. – – – – If f O(h) and g O(h) then f + g O(h). If f (h) and g (h) then f + g (h). If f (h) and g O(h) then f + g (h). These generalize to any number of terms • “Symmetry”: – If f (h) then h (f) – If f O(h) then h (f) – If f (h) then h O(f) 15 Asymptotic Bounds for Some Common Functions • Polynomials. a0 + a1n + … + adnd is (nd) if ad > 0. • Polynomial time. Running time is O(nd) for some constant d independent of the input size n. • Logarithms. O(log a n) = O(log b n) for any constants a, b > 0. can avoid specifying the base • Logarithms. For every x > 0, log n = O(nx). log grows slower than every polynomial • Exponentials. For every r > 1 and every d > 0, nd = O(rn). every exponential grows faster than every polynomial 16 Proving Bounds • Use Transitivity: – If an algorithm is at least as fast as another, then it has the same upper bound • Use Additivity: – f(n) = n3 + n2 + n1 + 3 – f(n) (n3) • Be direct: – Start with the definition and provide the parts it requires • Take the logarithm of both functions • Use limits: c, then f ( x) ( g ( x)) f ( x) lim 0, then f ( x) O ( g ( x)) x g ( x ) , then f ( x) ( g ( x)) • Keep in mind that sometimes functions can’t be bounded. (But I won’t assign you any like that!) 17 2.4 A Survey of Common Running Times 19 Linear Time: O(n) • Linear time. Running time is at most a constant factor times the size of the input. • Computing the maximum. Compute maximum of n numbers a1, …, an. def max(L): max = L[0] for i in L: if i > max: max = i return max 20 Linear Time: O(n) #the merge algorithm combines two #sorted lists into one larger sorted #list def merge(A,B): i = j = 0 M = [] while i < len(A) or j < len(B): if A[i] B[j]: M.append(A[i]) i+=1 else: M.append(B[j]) j+=1 if i == len(A): return M + B[j:] return M + A[i:] • Claim. Merging two lists of size n takes O(n) time. • Pf. After each comparison, the length of output list increases by 1. 21 O(n log n) Time • O(n log n) time. Arises in divide-and-conquer algorithms. • Sorting. Mergesort and heapsort are sorting algorithms that perform O(n log n) comparisons. • Largest empty interval. Given n time-stamps x1, …, xn on which copies of a file arrive at a server, what is largest interval of time when no copies of the file arrive? • O(n log n) solution. Sort the time-stamps. Scan the sorted list in order, identifying the maximum gap between successive time-stamps. 22 Quadratic Time: O(n2) • Quadratic time. Enumerate all pairs of elements. • Closest pair of points. Given a list of n points in the plane (x1, y1), …, (xn, yn), find the pair that is closest. def closest_pair(L): x1 = L[0] x2 = L[1] #no need to compute the sqrt for the distance min = (x1[0] – x2[0])**2 + (x1[1] – x2[1])**2 for i in range(len(L)): for j in range(i+1,len(L)) : x1,x2 = L[i],L[j] d = (x1[0] – x2[0])**2 + (x1[1] – x2[1])**2 if d < min : min d return min • 23 Remark. (n2) seems inevitable, but this is just an illusion. see chapter 5 Cubic Time: O(n3) • Cubic time. Enumerate all triples of elements. • Set disjointness. Given n sets S1, …, Sn each of which is a subset of 1, 2, …, n, is there some pair of these which are disjoint? def find_disjoint_sets(S): for i in range(len(S)): for j in range(i+1,len(S)): for p in S[i]: if p in S[j]: break; else: #no p in S[i] belongs to S[j] return S[i],S[j] #return tuple if found return None #return nothing if all sets overlap 24 Polynomial Time: O(nk) Time k is a constant • Independent set of size k. Given a graph, are there k nodes such that no two are joined by an edge? • O(nk) solution. Enumerate all subsets of k nodes. def independent_k(V,E,k): #subset_k,independent omitted for space for sub in subset_k(V,k): if independent(sub,E): return sub return None – Check whether S is an independent set = O(k2). – Number of k element subsets = n n (n 1) (n 2) (n k 1) nk – O(k2 nk / k!) = O(nk). k! k k (k 1) (k 2) (2) (1) poly-time for k=17, but not practical 25 Exponential Time • Independent set. Given a graph, what is maximum size of an independent set? • O(2n) solution. Enumerate all subsets. def max_independent(V,E): for k in len(V): if not independent_k(V,E,k): return k-1 26