5 - Civil Technocrats
advertisement

CONSTRUCTION MANAGEMENT
AND ADMINISTRATION
UNIT-V
Optimisation
Unit-V: List of topics
1. Introduction
2. Optimisation through linear programming
3. Formulation of LPP
4. Applications of linear programming
5. Graphical method
6. Advantages of LP
7. Limitations of LP
8. Simplex method
References:
“Operations Research” by SD Sharma
“Optimization Methods” D Nagesh Kumar, IISc, Bangalore NPTEL web
Introduction
Optimization is the selection of a best element (with regard to
some criteria) from some set of available alternatives
• Numerical Methods of Optimization
–
–
–
–
–
–
–
–
–
Linear programming
Integer programming
Quadratic programming
Nonlinear programming
Stochastic programming
Dynamic programming
Combinatorial optimization
Infinite-dimensional optimization
Constraint satisfaction
Optimisation through linear programming
• Linear programming is a technique for determining an optimum
schedule of interdependent activities in view of the available resources
and constraints
• Programming is just another word for planning and refers to the process
of determining a particular plan of action from amongst several
alternatives
• The word linear stands for indicating that all relationships involved in a
particular problem are linear
• Linear programming indicates the right combination of the various
decision variables which can be best employed to achieve the objective
taking full account of the practical limitations with in which the problem
must be solved
• Linear programming problems consist of a linear objective (cost)
function (consisting of a certain number of variables) which is to be
minimized or maximized subject to a certain number of constraints
Formulation of LP problems
Production allocation problem:
A firm manufactures two types of products A and B and sells them at a profit of Rs.2 on
type A and Rs.3 on type B. Each product is processed on two machines G and H. type A
requires 01 minute of processing time on G and 02 minutes on H; type B requires 01
minute on G and 01 minute on H. The machine G is available for not more than 6hours
40 minutes while machine H is available for 10hours during any working day. Formulate
the problem as a LPP.
Let x1 be the number of products of type A;
Machine
x2 be the number of products of type B
Time of products (min)
Available time (min)
Type A (x1 units)
Type B (x2 units)
G
1
1
400
H
2
1
600
Profit per unit
Rs.2
Rs.3
Total Profit, P=2*x1+3*x2 (objective function)
constraints
1*x1+1*x2 <=400; 2*x1+1*x2 <=600 ;
Non-negativity constraints
x1>=0; x2 >=0
Formulation of LP problems
The manufacturer of patent medicines is proposed to prepare a production plan for
medicines A and B. there are sufficient ingredients available to make 20000 bottles of
medicine A and 40000 bottles of medicine B, but there are only 45000 bottles into
which either of the medicines can be filled. Further it takes 3hours to prepare enough
material to fill 1000 bottles of medicine A and one hour to prepare enough material to
fill 1000 bottles of medicine B, and there are 66 hours available for this operation. The
profit is Rs.8 per bottle for medicine A and Rs.7 per bottle for medicine B.
Formulate the problem as a Linear Programming Problem.
Let x1 1000 be the number of bottles of medicine A
x2 1000 be the number of bottles of medicine B
Total Profit, P=8000*x1+7000*x2 (objective function)
Constraints
Non-negativity constraints
3*x1+1*x2 <=66;
1*x1+1*x2 <=45 ;
x1<=20;
x2 <=40;
x1>=0;
x2 >=0
General formulation of LP problem
In order to find the values of n decision variables x1, x2,..…xn to
maximize or minimize the objective function
z = c1x1+ c2x2+ c3x3+……....cnxn
and also satisfy m-constraints:
a11x1+a12x2+…….a1jxj….….a1nxn (<= or >=)b1
a21x1+a22x2+……..a2jxj……..a2nxn (<= or >=)b2
:
:
:
:
:
ai1x1+ai2x2+……...aijxj………ainxn (<= or >=)bi
:
:
:
:
:
am1x1+am2x2+…….amjxj…….amnxn (<= or >=)bm
Also non-negativity constraints x1 >=0, x2 >=0,….xj >=0,….xn >=0
Applications of LP
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Personal assignment problem
Transportation problem
Efficiencing on operation of system of dams
Optimum estimation of executive compensation
Agricultural applications
Military applications
Production management
Marketing management
Manpower management
Physical distribution
Graphical method (eg.1)
Step 1: consider each inequality constraint as equation and
Plot all the constraints one by one on a graph paper
Step 2: Identify the common region of all the
constraints
Step 3: Plot the objective function assuming any
constant, k
6x+5y=k
This is known as z line
Pull z line until the extreme points of
feasible region
In the maximization case this line will
stop from farthest from the origin
and passing through at least one
corner of the feasible region
In the minimization case this line will
stop nearest to the origin and
passing through at least one
corner of the feasible region
Step 4: Read the coordinates of extreme points and
find the maximum/minimum value of z
It can be visually noticed that value
of the objective function will be
maximum when it passes through
the intersection of x+3y=7 and
4x+y=15 (straight lines associated
with the 2nd and 3rd inequality
constraints). This is known as
optimal point.
The optimal point of the present
problem is x=3.091 and
y=2.636 .
And the optimal solution is 6x+5y =31.727
Graphical method (eg.2)
The manufacturer of patent medicines is proposed to prepare a production plan for
medicines A and B. there are sufficient ingredients available to make 20000 bottles of
medicine A and 40000 bottles of medicine B, but there are only 45000 bottles into
which either of the medicines can be filled. Further it takes 3hours to prepare enough
material to fill 1000 bottles of medicine A and one hour to prepare enough material to
fill 1000 bottles of medicine B, and there are 66 hours available for this operation. The
profit is Rs.8 per bottle for medicine A and Rs.7 per bottle for medicine B.
Formulate the problem as a LPP.
Let x1 1000 be the number of bottles medicine A
x2 1000 be the number of bottles of medicine B
Total Profit, P=8000*x1+7000*x2 (objective function)
(constraints)
3x1+x2 <=66;
x1+x2 <=45 ;
x1<=20;
x2 <=40;
x1>=0;
x2 >=0
Step 1: consider each inequality constraint as equation and
Plot all the constraints one by one on a graph paper
3x1+x2 <=66;
x1+x2 <=45 ;
x1<=20;
x2 <=40;
x1>=0;
x2 >=0
x1<=20
70
60
50
x2 <=40
40
30
20
10
0
0
10
20
30
40
50
60
70
Step 2: Identify the common region of all the
constraints
3x1+x2 <=66;
x1+x2 <=45 ;
x1<=20;
x2 <=40;
x1>=0;
x2 >=0
x1<=20
70
60
50
x2 <=40
40
30
20
10
0
0
10
20
30
40
50
60
70
Step 3: Plot the objective function assuming any
constant, k
Total Profit, P=8000*x1+7000*x2 (objective function)
k=8000*x1+7000*x2
x1<=20
70
60
50
x2 <=40
40
30
20
10
K=100000, x1=0: x2=100/7
x2=0; x1=100/8
0
0
10
20
30
40
50
60
70
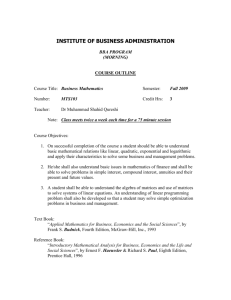
Step 4: Read the coordinates of extreme points and
find the maximum/minimum value of z
Total Profit, P=8000*x1+7000*x2 (objective function)
It can be visually noticed
that value of the
objective function will
be maximum when it
passes through the
intersection of
3x1+x2=66 and
x1+x2=45 ( 1st and 2nd
constraints).
This is known as optimal
point. The optimal
point of the present
problem is
x1=10.5 X2 =34.5
x1<=20
70
Maximum point
60
50
x2 <=40
40
30
20
10
0
0
10
20
30
40
50
60
8000*10.5+7000*34.5=325000
70
Graphical method (eg.3)
Minimize z=1.5x1+2.5x2
Subject to : x1+3x2>=3
x1+x2>=2
x1, x2 >=0
Step 1: consider each inequality constraint as equation and
Plot all the constraints one by one on a graph paper
x1+3x2>=3
x1+x2>=2
x1, x2 >=0
2.5
2
1.5
1
0.5
0
0
1
2
3
4
Step 2: Identify the common region of all the constraints
x1+3x2>=3
x1+x2>=2
x1, x2 >=0
2.5
2
1.5
1
0.5
0
0
1
2
3
4
Step 3: Plot the objective function assuming any constant, k
Objective function
Minimize
z=1.5x1+2.5x2
Let constant k=4
1.5x1+2.5x2=4
2.5
2
1.5
1
0.5
0
0
1
2
3
k=1.5x1+2.5x2
4
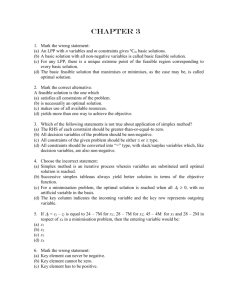
Step 4: Read the coordinates of extreme points and find the
maximum/minimum value of z
2.5
Objective function z=1.5x1+2.5x2
2
It can be visually noticed
that value of the
objective function will 1.5
be minimum when it
1
passes through the
intersection of x1+x2=2
and x1+3x2=3 ( 1st and 0.5
2nd constraints).
This is known as optimal
0
point. The optimal
0
point of the present
problem is
x1=1.5
X2 =0.5
1
1.5*1.5+2.5*0.5=3.5
2
3
4
Slack and Surplus variables
Slack variables: if a constraint has ≤ sign, in order to make it an
equality, we have to add something positive to the left hand side.
The non-negative variable which is added to the left hand side of
the constraint to convert it into equation is called the slack
variable
Eg. x1+x2 ≤ 4
2x1+4x2 ≤5
We add slack variables x3, x4 ≥0
x1+x2 +x3
2x1+4x2
=4
+x4 =5
Slack and Surplus variables
Surplus variables: if a constraint has ≥ sign, in order to make it an
equality, we have to subtract something non-negative from its left
hand side. The non-negative variable which is subtracted from to
the left hand side of the constraint to convert it into equation is
called the surplus variable
Eg. x1+x2 ≥ 4
2x1+4x2 ≥5
We subtract surplus variables x3, x4 ≥0
x1+x2 -x3
=4
2x1+4x2
-x4=5
Standard form of LP Problem
1. All the constraints should be converted to equations except
for the non-negativity restrictions which remain as
inequalities
2. The right side element of each constraint should be made
non-negative (if not)
– Eg. 3x-4y≥-4
3x-4y-z=-4
-3x+4y+z = 4
3. All variables must have non-negative values
4. The objective function should be of maximization form
Min. f(x)= - Max. [--f(x)]
Min. z = c1x1+c2x2+…+cnxn
Max.(-z), i.e. Max z’≈ - c1x1-c2x2-..…-cnxn with z=-z’.
Standard form of general LPP with ≤ constraints
• Max. z= c1x1+c2x2+…+cnxn +0xn+1+…+0xn+m
• Subject to
a11x1+a12x2+…….a1nxn+xn+1
a21x1+a22x2+…....a2nxn +xn+2
:
:
:
:
am1x1+am2x2+…..amnxn
=b1
=b2
:
+xn+m =bm
where x1≥0, x2≥0,….xn≥0, xn+1 ≥0, xn+m≥0
Matrix form of LP Problem
Maximize z = CXT
(objective function)
• Subject to A X = b, b≥0
(Constraint equation)
• X≥0
(No-negativity restriction)
Where
X=(x1, x2, …xn, xn+1, ……xn+m)
C= (c1, c2,…cn, 0, 0, 0….0) and b= (b1, b2, ……,bm)
A= a11 a12 .
.
.a1n 1
0... 0
a21 a22 .
.
.a2n 0
1... 0
.
.
.
.
.
.... .
am1 am2 .
.
.amn 0
0
1
Assumptions in LPP
a) Proportionality
–
Objective function and every constraint function must be linear
b) Additivity
–
A machine takes x hours of processing time for product A and for
product B it takes y hours then for both A&B together it take x+y hours
time
c) Multiplicativity
–
–
1hour for 1product then 10hours for 10products
The total profit from N no.of units is the unit profit times the no.of units
sold
d) Divisibility
–
It means that the fractional levels of variables must be permissible
besides integral values
e) Deterministic
–
All the parameters in the linear programming models are assumed to be
known exactly
Advantages of LP
1.
2.
3.
4.
Linear programming technique helps in making the optimum utilization
of productive resources. It also indicates how a decision maker can
employ his productive factors most effectively by choosing and
allocating these resources
The quality of decision may also be improved by linear programming
techniques. The user of this technique becomes more objective and less
subjective
Linear programming technique provides practically applicable solutions
since there might be other constraints operating out side the problem
which must also be taken into consideration just because, so many units
must be produced does not mean that all those can be sold. So the
necessary modification of its mathematical solution is required for the
sake of convenience to the decision maker
In production processes, high lighting of bottlenecks is the most
significant advantage of this technique. For example, when bottlenecks
occur, some machines cannot meet the demand while others remain
idle for some time
Limitations of LP
1.
2.
3.
4.
5.
6.
In some problems objective functions and constraints are not linear.
Generally, in real life situations concerning business and industrial problems
constraints are not linearly treated to variables
There is no guarantee of getting integer valued solutions, for example, in
finding out how many men and machines would be required to perform a
particular job, rounding off the solution to the nearest integer will not give an
optimal solution. Integer programming deals with such problems
LP model does not take into consideration the effect of time and uncertainty.
Thus the model should be defined in such a way that any change due to
internal as well as external factors can be incorporated
Sometimes large-scale problems cannot be solved with LP techniques even
when the computer facility is available. Such difficulty may be removed by
decomposing the main problem into several small problems and then solving
them separately
Parameters appearing in the model are assumed to be constant. But in real
life situations they are neither constant nor deterministic
LP deals with only single objective, whereas in real life situations problems
come across with multi-objectives. Goal programming and multi-objective
programming deals with such problems
Some Important definitions
• Solution to LPP: Any set X={x1, x2,..…xn+m} of variables is called a solution
to LP problem, if it satisfies the set of constraints only
• Feasible solution (FS): Any set X={x1, x2,..…xn+m} of variables is called a
Feasible solution to LP problem, if it satisfies the set of constraints and
non negativity restrictions also
• Basic solution (BS): it is a solution obtained by setting any n variables
(among m+n variables) equal to zero and solving for remaining m
variables, provided the determinant of the coefficients of these m
variables is non-zero. Such m variables are called basic variables and
remaining n zero-valued variables are called non-basic variables
• Basic Feasible solution (BFS): it is a basic solution which also satisfies
the non negativity restrictions, that is all basic variables are nonnegative
– Non-degenerate BFS: it is the basic feasible solution which has exactly m basic
variables are positive and the remaining n variables will be all zero
– Degenerate BFS: a basic feasible solution is called degenerate, if one or more
basic variables are zero valued
Some Important definitions
• Optimum Basic Feasible Solution: a basic feasible solution is said
to be optimum, if it also optimizes (maximize/minimize) the
objective function
• Unbounded Solution: if the value of the objective function z can
be increased or decreased indefinitely, such solutions are called
unbounded solutions
Canonical form of standard LPP
• Canonical form of standard LPP is a set of equations consisting of
the ‘objective function and all the ‘equality constraints’ (standard
form of LPP) expressed in canonical form.
• Understanding the canonical form of LPP is necessary for studying
simplex method, the most popular method of solving LPP
• Let us consider a set of three equations with three variables for
ease of discussion.
• The system of equations can be transformed in such a way that a
new set of three different equations are obtained, each having
only one variable with nonzero coefficient. This can be achieved
by some elementary operations
Canonical form of standard LPP cont...
• The following operations are known as elementary operations.
– Any equation Er can be replaced by kEr, where k is a nonzero constant
– Any equation Er can be replaced by Er + kEs, where Es is another equation
of the system and k is as defined above
• Note that the transformed set of equations through elementary
operations is equivalent to the original set of equations. Thus,
solution of the transformed set of equations will be the solution
of the original set of equations too
• Now, let us transform the above set of equations (A0, B0 and C0)
through elementary operations
Canonical form of standard LPP cont...
→
• Note that variable x is eliminated from equations B0 and C0 to
obtain B1 and C1 respectively. Equation A0 in the previous set is
known as pivotal equation.
• Following similar procedure, y is eliminated from A1 and C1 as
follows, considering B1 as pivotal equation.
Canonical form of standard LPP cont...
• Finally, z is eliminated form A2 and B2 as follows, considering C2
as pivotal equation
• Thus we end up with another set of equations which is equivalent
to the original set having one variable in each equation.
Transformed set of equations, (A3, B3 and C3), thus obtained are
said to be in canonical form
• Operation at each step to eliminate one variable at a time, from
all equations except one, is known as pivotal operation
Simplex method
• Simplex method is the most popular method used for the
solution of Linear Programming Problems (LPP)
• Solution of a LPP, if exists, lies at one of the vertices of
the feasible region. All the basic solutions can be
investigated one-by-one to pick up the optimal solution.
• For 10 equations with 15 variables there exists 15C10=
3003 basic feasible solutions. Too large number to
investigate one-by-one.
• This can be overcome by simplex method
General procedure of Simplex method
1. General form of given LPP is transformed to its
canonical form
2. Find a basic feasible solution of the LPP (there should
exist at least one).
3. Move to an adjacent basic feasible solution which is
closest to the optimal solution among all other
adjacent vertices.
4. Repeat until optimum solution is achieved.
Step three involves ‘Simplex Algorithm’
Simplex Algorithm
• Consider following LPP
Simplex Algorithm …contd.
LPP is to be transformed to its standard form
Simplex Algorithm …contd.
Set of equations, including the objective function is to be
transformed to canonical form
Basic feasible solution of above canonical form is
x4 = 6, x5= 0, x6= 4
, x1= x2= x3= 0 and
Z= 0
Simplex Algorithm …contd.
Symbolized form
• The left-most column is known as basis as this is
consisting of basic variables
• The coefficients in the first row (C1,....,C6) are known as
cost coefficients
Simplex Algorithm …contd.
This completes first step of algorithm.
After completing each step (iteration) of algorithm, following three
points are to be examined:
1. Is there any possibility of further improvement?
–
If any one of the cost coefficients is negative further improvement is
possible
2. Which non-basic variable is to be entered into the basis?
–
Entering variable is decided such that the unit change of this variable
should have maximum effect on the objective function. Thus the variable
having the coefficient which is minimum among all cost coefficients is to
be entered, i.e., xs is to be entered if cost coefficient cs is minimum
3. Which basic variable is to be exited from the basis?
–
–
After deciding the entering variable xs, xr(from the set of basic variables)
is decided to be the exiting variable if br/crs is minimum for all possible r,
provided crs is positive.
Crs is considered as pivotal element to obtain the next canonical form
Simplex Algorithm …contd.
• Entering variable :
– c1is minimum (-4), thus, x1is the entering variable for the next
step of calculation
• Exiting variable:
– r may take any value from 4, 5 and 6
– It is found that b4/c41 = 6/2=3, b5/c51=0/1 , b6/c61=4/5
– As , b5/c51 is minimum r=5 thus x5 is to be exited
• c51 ( = 1) is considered as pivotal element and x5 is
replaced by x1in the basis. Thus a new canonical form is
obtained through pivotal operation
Simplex Algorithm …contd.
Pivotal operation
• Pivotal row is transformed by dividing it with the pivotal element.
In this case, pivotal element is 1.
• for other rows: Let the coefficient of the element in the pivotal
column of a particular row be “l”. Let the pivotal element be “m”.
Then the pivotal row is multiplied by ‘l / m’ and then subtracted
from that row to be transformed.
• This operation ensures that the coefficients of the element in the
pivotal column of that row becomes zero, e.g., Z row: l = -4 , m =
1. So, pivotal row is multiplied by l / m = -4 / 1 = -4, obtaining 4x1+16x2-8x3+0x4-4x5+0x6=0 .
• This is subtracted from Z row, obtaining
0x1-5x2+6x3+0x4+4x5+0x6+z=0,
• The other two rows are also suitably transformed.
Simplex Algorithm …contd.
-(-4/1*E3-E1)
-(2/1*E3-E2)
-(5/1*E3-E4)
• After the pivotal operation, the canonical form obtained as
follows
• The basic solution of above canonical form is
x1= 0, x4= 6, x6= 4, x2= x3= x5= 0 and Z= 0
• Note that cost coefficient c2is negative. Thus optimum solution is
not yet achieved. Further improvement is possible
Simplex Algorithm …contd.
• Entering variable:
c2is minimum (-15), thus, x2 is the entering variable for the next
step of calculation
• Exiting variable:
r may take any value from 4, 1 and 6. However, c12 is negative (-4).
Thus, r may be either 4 or 6. It is found that b4/c42=6/9=0.667 and
b6/c62=4/18 =0.22.
• As b6/c62 is minimum, r is 6. Thus x6 is to be exited.
• c62 ( = 18) is considered as pivotal element and x6 is to be replaced
by x2 in the basis Thus another canonical form is obtained
Simplex Algorithm …contd.
-(-15/18*E4-E1)
-(9/18*E4-E2)
-(-4/18*E4-E3)
(E4/18)
• The canonical form obtained after third iteration
• The basic solution of above canonical form is
x1= 8/9, x2= 2/9, x4= 4, x3= x5= x6= 0 and Z= 10/3.
• Note that cost coefficient c3 is negative. Thus optimum solution is
not yet achieved. Further improvement is possible
Simplex Algorithm …contd.
• Entering variable:
c3is minimum (-4), thus, x3 is the entering variable for the next
step of calculation
• Exiting variable:
x4 is the exiting variable. Thus c43 ( = 4) is the pivotal element and
x4is to be replaced by x3 in the basis. Thus another canonical form
is obtained
Simplex Algorithm …contd.
-(-4/4E2-E1)
(E2/4)
-(-1/6*E2-E3)
-(-1/6E2-E4)
• The canonical form obtained after fourth iteration
• The basic solution of above canonical form is
x1= 14/9, x2= 8/9, x3= 1, x4= x5= x6= 0 and Z= 22/3
• Note that all the cost coefficients are nonnegative. Thus the
optimum solution is achieved
The “key element” or “pivot element”
• What is Key element
– The element at the intersection of minimum ratio arrow(
)
and incoming vector arrow ( ) in the simplex table is called
the “key element” or “pivot element”
– key element indicates that the current table must be
transformed in such a way that the key element becomes 1
and all other elements in that column become 0
Need of artificial variable in LP model
• LP problems, in which constraints may also have ≥ and =
signs after ensuring that all bi are ≥ 0, are considered in two
phase method. In such problems, basis matrix is not
obtained as an identity matrix in the starting simplex table,
therefore we introduce a new type of variable called the
Artificial variable
• These variables are fictitious and cannot have any physical
meaning
• The artificial variable technique is merely a device to get the
starting basic feasible solution, so that simplex procedure
may be adopted as usual until the optimal solution is
obtained
• Artificial variables can be eliminated from the simplex table
as and they become zero (non-basic)
linear programming in Construction Management
Linear programming can be used in construction management to
solve many problems such as:
1. Optimizing use of resources
2. Determining most economic product mix.
3. Transportation and routing problems.
4. Personnel assignment.
5. Determining Optimum size of bid.
6. Location of new production plants, offices and warehouses
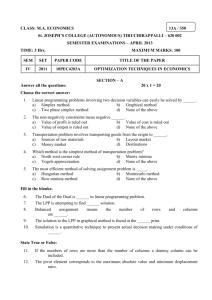
Examples of use of linear programming in
construction
A pre-mixed concrete firm has to supply concrete to three different
projects A, B, and C. The projects require 200, 350, and 400 cubic
meters of concrete in a particular week.
The firm has three plants P1, P2, and P3 which can produce 250,
400 and 350 respectively. The cost is different from each Pant to
each project since distance will vary. It is required to determine
the quantity to be supplied from each plant to each project such
that cost to be incurred is a minimum
Assignment -5
•
•
•
•
Applications of LP in construction management
Advantages of LP
Limitations of LP
What is Canonical Form of LP?