Chapter 10 - Moments of Inertia of Areas
advertisement

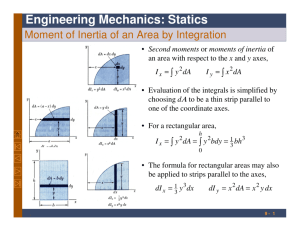
Chapter 10 - Moments of Inertia of Areas Consider the beam shown below dA Neutral Axis Pure Bending dF = k y dA Internal forces are distributed forces whose magnitudes vary linearly with the distance y from an axis passing through the centroid of the section. Total resultant: R kydA k ydA 1st moment, Qx The moment: dM ydF ky2 dA M ky2 dA k y 2 dA 2nd moment, Qxx Moment of inertia Moment of inertia of an area by integration y y x x dy y x x dx a dA = (a - x)dy dA = ydx Rectangular moments of inertia I x y 2 dA Lecture21.doc I y x 2 dA 1 Polar moment of inertia J o r 2 dA J o r 2 dA ( x 2 y 2 )dA y 2 dA x 2 dA Jo Ix I y Radius of gyration of an area y Has moment of inertia A x Concentrate this area in a thin strip y If a strip is to have same moment of inertia, the strip should be placed as shown. A kx x By def: I x k x A 2 Thus: kx Ix A I y ky A ky Iy J o ko A ko Jo A 2 2 A or ko k x k y 2 2 2 Radius of gyration - the distance, from an axis which passes through the CG, at which all the area or mass of an object could be concentrated without changing its moment of inertia. Lecture21.doc 2 Parallel- Axis Theorem Consider: dA y' B B' centroidal axis C y d A A' Moment of inertia with respect to AA' I y 2dA y y d I ( y d ) 2 dA I y 2 dA 2d y dA d 2 dA MOI, I W.R.T. Centroidal Axis I I Ad 2 1ST moment W.R.T. BB. Centroid, C, is located on BB' total area Parallel axis theorem The moment of inertia of an area W.R.T. to any given axis AA' is equal to the MOI I of the area with respect to the centroidal axis plus Ad 2 . Product of area, A, and the square of the distance d between the 2 axes. J o J c Ad 2 The parallel axis theorem can be applied only if one of the two parallel axes passes through the centroid of the area. Lecture21.doc 3 Example 1). Given: y x x2 y 4h 2 a a h x a Find: Moment of inertia of shaded area with respect to the y-axis. y a x y h x dx dA = ydx 3 a a x x x2 x4 a3 a3 x4 x5 a I y x 2 dA x 2 4h 2 dx 4h 2 dx 4h 2 4h 0 0 5 a a a a 4a 5a 0 4 Iy 1 3 ha 5 Lecture21.doc 4