Chapter No
advertisement

N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Analog Pulse Modulation:
In Analog Pulse Modulation, a periodic rectangular pulse train is used as the carrier wave
and some parameter of it, e.g. amplitude, width or position, is varied in accordance with
the message signal. The variation in any of the mentioned parameters is produced in a
smooth and analog fashion. Thus, information is transmitted basically in analog manner
but the transmission takes place at discrete times. In Digital Pulse Modulation, on the
other hand, the message signal is represented in a form that is discrete both in time and
amplitude.
As mentioned above, the parameters suitable for modulation are amplitude, width and
position of a pulse. Therefore, the corresponding modulation processes are designated as
Pulse Amplitude Modulation (PAM), Pulse Width Modulation (PWM) and Pulse Position
Modulation (PPM).
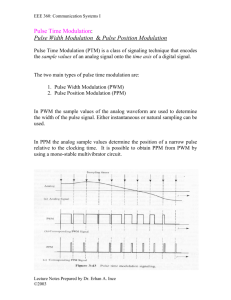
These modulation schemes are described in the following figure. In PAM., the amplitude
of the carrier pulses is increasing and decreasing in accordance to the message signal.
Pulses are getting broader or narrower as the message signal is increasing or decreasing
respectively in PWM. There is no change in the amplitude of pulses. In the last figure,
constant amplitude pulses are being delayed or generated early to represent increasing or
decreasing message signal.
The above figure is only for illustration purpose. In actual practice the pulse duration is
very small as compared to pulse time period Ts.
Pulse Amplitude Modulation (PAM):
Definition:
“In Pulse Amplitude Modulation, the amplitudes of regularly spaced
pulses are varied in proportion to the corresponding sample values
of a continuous message signal.”
Explanation:
The pulses used in PAM are usually of rectangular shape, but some other appropriate
shapes are also possible. PAM as defined here is somewhat similar to practical sampling,
where the message signal is multiplied by a periodic train of rectangular pulses.
However, in practical sampling the top of each modulated rectangular pulse varies with
the message signal, whereas in PAM it is maintained flat. In other words, flat top
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
sampling basically generates PAM. There are two operations involved in the generation
of PAM signal.
1. Instantaneous Sampling of the message signal x(t) every Ts seconds, where the
sampling rate fs = 1/Ts is chosen in accordance with the sampling theorem.
2. Lengthening the duration of each sample obtained to some constant interval τ.
These operations can be easily performed using a simple circuit known as Sample and
Hold (S/H). A brief description of the circuit is as follows.
Sample and Hold Circuit:
A conventional sample and hold circuit consists of two FET switches connected in series.
A capacitor is also connected in parallel with second FET as shown in the following
figure.
Message signal is applied at Sampling Switch FET whereas sampled output is collected
across Discharge Switch FET. When a positive voltage pulse is applied at the sampling
switch gate G1 then it works like a closed switch and transfers the message signal voltage
across the capacitor. Thus, the capacitor is charged with a voltage equal to that of
message signal. Hence, the capacitor now contains a sample value of the message signal.
After a certain interval of τ seconds, another pulse is applied at the gate G2 of the
discharge switch which now acts like closed switch and discharges the capacitor.
Therefore, the capacitor holds the sample value for τ seconds and completes the sample
and hold operation. In this manner, alternating pulses at G1 and G2 generate sampled
version of the message signal at the output terminal as shown in the following figure.
The operation of holding a sample value for a particular period of time is done
intentionally. This makes the sampled waveform to spread in time domain, thus
according to Reciprocal Spreading, it shrinks in frequency domain and occupies a
smaller bandwidth. Smaller values of τ (holding time) squeeze the sampled signal in time
but it then occupies larger bandwidth.
Mathematical Analysis:
Let the message signal to be sampled is x(t) and its sampled waveform obtained after S/H
circuit is xs(t). Assume that s(t) is a single rectangular pulse of duration τ and unit
amplitude, i.e.
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
s(t) = 1
; 0<t<τ
s(t) = 0
; elsewhere
This definition ensures that the top of the pulse remains flat. Now, mathematically each
sample value is the product of x(t) and s(t). Since samples are collected after every Ts
seconds, therefore xs(t) is the sum of all samples separated by Ts in terms of time.
∞
xs(t) = ∑ x(t) s(t – nTs)
n=-∞
Since x(t) is sampled at t = nTs, therefore, x(t) = x(nTs). Hence above equation becomes:
∞
xs(t) = ∑ x(nTs) s(t – nTs)
………(i)
n=-∞
If the duration of sampling pulse is approaching to zero, i.e. τ → 0, then the rectangular
pulses become impulses and the sampling thus performed becomes Ideal Sampling. In
this situation the sampled waveform is represented by xδ(t) instead of xs(t).
∞
xδ(t) = ∑ x(nTs) δ(t – nTs)
………(ii)
n=-∞
To evaluate a better and simple equation for xs(t), consider the convolution between xδ(t)
and s(t).
∞
xδ(t) * s(t) = ∫ xδ(λ) s(t – λ) dλ
-∞
Putting the value of xδ(λ) from equation (ii).
∞
∞
xδ(t) * s(t) = ∫ {∑ x(nTs) δ(λ – nTs)} s(t – λ) dλ
-∞
n=-∞
Interchanging the operations of summation and integration, we get:
∞
∞
xδ(t) * s(t) = ∑ x(nTs) ∫ δ(λ – nTs) s(t – λ) dλ
n=-∞
-∞
Integral in the above equation represents convolution between impulse function “δ” and
rectangular pulse “s”. And, we know a property of impulse function that whenever it is
convolved with some other function, it generates the function again, i.e. it is similar to
identity element with respect to convolution. It means that:
∞
∫ δ(λ – nTs) s(t – λ) dλ = s(t – nTs)
-∞
Hence, the convolution xδ(t) * s(t) becomes:
∞
xδ(t) * s(t) = ∑ x(nTs) s(t – nTs)
n=-∞
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Using equation (i), the right hand side of the above expression represents xs(t), i.e.:
xδ(t) * s(t) = xs(t) …………(iii)
This equation is much more simple and informative as compared to equation (i). It also
simplifies the spectral analysis of sampled waveform xs(t). Taking Fourier transform of
the above equation:
F[xs(t)] = F [xδ(t) * s(t)]
Since convolution becomes multiplication in frequency domain, therefore:
Xs(f) = Xδ(f) S(f) …….(iv)
To analyze Xs(f) in detail, we describe Xδ(f) and S(f) separately.
Description of S(f):
Since we assumed s(t) a rectangular pulse of unit amplitude from t = 0 to τ, or in other
words it is a rectangular pulse of unit amplitude and centered at t = τ / 2.
s(t) = Π {(t – τ/2) / τ}
Fourier transform of s(t) can be evaluated using time delay property. Therefore:
S(f) = F[s(t)] = τ Sinc (fτ) exp(-j2πf τ/2)
If we calculate the magnitude of S(f) then:
|S(f)| = τ Sinc (fτ)
S(f) and s(t) are plotted in the following figure.
Description of Xδ(f):
Similarly Xδ(f) is the spectrum of ideally sampled waveform. We know from our
previous discussion that Xδ(f) is the repetition of X(f) with each repetition multiplied by
fs (sampling frequency), where X(f) is the spectrum of the message signal.
X(f) = fs X(f + nfs)
n=-
Assume that the message signal spectrum takes the following shape.
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Using this shape the spectrum of Xδ(f) can be drawn as follows, provided that the
sampling rate is equal to 2W.
Description of Xs(f):
Now, according to equation (iv) Xs(f) is the product of Xδ(f) and S(f) and will take the
following shape.
It was discussed earlier that the message signal can be reconstructed from its sampled
version, whether ideal or practical, using a low pass filter of passband 2W, if Nyquist
criterion is satisfied. The reason is that the sampled waveform spectrum contains all
frequency components present in the message signal in the same proportion.
The situation is little different here. It is obvious from the above figure that S(f), which is
a Sinc function, is distorting that portion of Xδ(f) which is needed for message
reconstruction i.e. from –W to +W. The amplitudes of the frequency components near
±W are severely attenuated. Similarly, the frequency components above ±W, though they
are not needed for message reconstruction, are almost vanished. So, apparently message
signal can not be recovered from its sampled version using a low pass filter.
Message Reconstruction:
There are two possible solutions to reconstruct the message signal from sampled version
without any distortion.
As pointed out, the main reason for the distortion of Xδ(f) is the shape of Sinc function
S(f). A narrow Sinc function will distort the sampled message signal spectrum more
severely. On the other hand a broader Sinc function will cause a negligible damage. The
width of the Sinc pulse can be maintained by suitably selecting the duration τ (also
known as high time or aperture) of the rectangular pulses used for sampling. Keeping the
phenomenon of reciprocal spreading in mind, it is suggested that τ should be very small
to produce a broad Sinc function in frequency domain. Otherwise, if τ is large, then a
narrow Sinc function will greatly distort the sampled waveform spectrum. This is also
known as Aperture Effect.
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Aperture effect can not be removed but minimized to a tolerable or curable level. If τ is
very small as compared to the sampling interval Ts then distortion due to aperture effect
becomes negligible. This slightly distorted signal is then passed through a circuit known
as equalizer. The output characteristics of the equalizer are designed such that it
reciprocates the aperture effect and produces distortion less output. The condition of
distortion less transmission is that each frequency component must experience constant
amplitude gain and time delay. So, if output is of the form K exp(-j2πftd) then it
represents distortion less signal (refer section 3.2 of Communication Systems by A.
Bruce Carlson). Hence a logical sequence can be given as:
Ideally sampled
waveform Xδ(f)
Distortion due to
aperture effect
S(f)
Distorted signal X s(f)
Equalizer
Heq(f)
Distortionless signal
From the above block diagram, it is clear that the condition for distortion less signal is:
Heq(f) S(f) = K exp(-j2πftd)
Heq(f) = K exp(-j2πftd) / S(f)
Hence an equalizer with this transfer function eliminates distortion due to aperture effect
and produces distortion less reconstructable signal. If τ << Ts then aperture effect is
negligible and equalization may be omitted. But this makes Sinc function to occupy a
large bandwidth. Therefore we usually find that a PAM signal occupies much more
bandwidth as compared to the actual message bandwidth, i.e.
Transmission Bandwidth = BT >> 2W
Pulse Time Modulation:
Introduction:
Pulse Width Modulation (PWM) and Pulse Position Modulation (PPM) are grouped
under the category of Pulse Time Modulation. The reason is that in both schemes
message signal information is hidden in a time parameter of the pulse. In PWM, duration
of the pulse, and, in PPM the instant of pulse occurrence is varied in accordance with the
message signal. No variations in pulse amplitude are made. This similarity leads to
similar circuits for the production and detection of PWM and PPM.
Definitions:
“In Pulse Width Modulation (or Pulse Position Modulation),
the width (or time of occurrence) of individual carrier pulses
is varied in accordance with the samples of message signal.”
Explanation:
In PWM and PPM, constant amplitude pulses are used. These pulses are not equally
spaced in contrast to PAM. In PWM, τo represents the unmodulated pulse width or pulse
width when modulating signal is zero. Following figure depicts PWM and PPM schemes
used for modulation.
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Circuits:
As stated earlier, same circuits with a little modification can be used to generate PWM
and PPM. This circuit uses a comparator and saw-tooth wave generator with period Ts. At
one input of the comparator the message signal x(t) is applied whereas saw-tooth wave is
applied at the other input. Comparator output is basically PWM signal. This output is
applied to a monostable pulse generator that triggers on negative edges at its input and
produces short output pulses of fixed duration. The circuit configuration is as follows:
The comparator generates a positive constant output of amplitude “A” when the message
signal remains higher than the saw-tooth wave. Otherwise, the comparator output remains
zero. Thus, the comparator produces variable width pulses according to the message
signal, provided that saw-tooth wave satisfies Nyquist criterion.
On the other hand, whenever comparator output goes from higher voltage to zero level, it
triggers the monostable pulse generator. Hence both outputs look like as follows:
The vertical edges of saw-tooth wave are Ts sec apart and hence they always cross the
time axis at t = kTs, where k is any integer. These are the points in time where PWM pulse
should begin. Peak to peak value of saw-tooth wave is selected so that the message signal
would never go beyond this range. Therefore, the message signal will always be at higher
value than saw-tooth wave at vertical crossings or t = kTs. Thus, the comparator will start
generating a constant signal of amplitude A. If the message signal is varying slowly then
saw-tooth wave will quickly exceed and the comparator output will become zero. Hence
a pulse would be generated whose width is proportional to the variation in the message
signal. At the same time, this negative edge of the comparator output will cause
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
monostable pulse generator to produce a pulse of constant width and amplitude delayed
from its actual position (t = kTs). This delay is again proportional to the variation in the
message signal. Hence, we will obtain PWM and PPM signals as shown in the above
figure.
Mathematical Analysis:
PWM:
Let the unmodulated pulse width of a PWM signal is τo, whereas any arbitrary pulse
width proportional to some non zero message signal value is τk. Hence we can say that:
τk = τo + Change in pulse width
where;
Change in pulse width α Message Signal x(t)
Change in pulse width = (Constant) x(t)
Therefore the above equation becomes:
τk = τo + (Constant) x(t)
τk = τo { 1 + (Constant / τo) x(t) }
Let;
Modulation Index = μ = Contant / τo
Therefore;
τk = τo { 1 + μ x(t) }
Since the message is being sampled only at t = kTs, hence;
τk = τo { 1 + μ x(kTs) }
PPM:
As described above that the PPM pulse is being generated at the negative edge of PWM
signal. Therefore, there will be an inherent delay “td” from t = kTs in the PPM output
even if the message signal x(t) is zero. This is illustrated in the following figure.
Hence, any arbitrary time of occurrence tk of the PPM pulse can be given as:
tk = kTs + td + Delay proportional to the message signal x(t)
tk = kTs + td + to x(t)
where;
to = Constant of proportionality
Since the message is being sampled only at t = kTs, hence;
tk = kTs + td + to x(kTs)
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Demodulation of PWM and PPM Signals:
As explained in the previous section that PWM and PPM signals can be generated using
similar circuits with little modifications. Similarly, the arbitrary pulse width which
contains the message information in PWM is equal to the arbitrary delay from t = kTs in
PPM. This means we have to measure same interval on time axis in order to demodulate
PWM or PPM signals whether it represents pulse width or pulse delay. Therefore, again,
we can say that similar circuits would be needed for demodulation.
PWM Demodulation:
The most important thing in demodulating PWM is to determine precisely the starting
and ending instants of the pulses. This can be done easily by passing the PWM signal
through a differentiator. The slope of a pulse is zero anywhere except positive and
negative edges where the slope is positive and negative infinity respectively. Therefore,
when a PWM signal is applied at the differentiator, the output is a series of positive and
negative impulses exactly at the beginning and ending points of pulses. The circuit is
shown in the following figure.
These impulses are separated through clipping circuits and applied to a ramp generator.
Positive impulses represent the starting points of the PWM pulses and used to turn on the
ramp generator. Whereas, negative impulses indicate the end points and the ramp
generator is turned off because of them. The output of the ramp generator is a series of
triangular waves. The area of individual triangular pulse is proportional to the width of
the corresponding PWM pulse. These triangular pulses are then fed to an integrator which
produces an output level proportional to the area of the triangular pulse, which is in turn
proportional to the actual message signal.
PPM Demodulation:
In demodulating PPM signal, we are not interested in pulse width, as the message
information is hidden in pulse delay and pulse widths are constant. So, the most
important thing to be determined is the instant when the PPM pulse is generated. We
must also determine the unmodulated instant of occurrence (t = kTs) of the pulse.
Therefore, following modifications are made in the above circuit to make it a PPM
demodulator.
N.E.D. University of Engineering and Technology
Department of Electronic Engineering
Lecture Notes: Communication Systems II
Now, only positive impulses obtained from the differentiator are allowed to pass through
to the ramp generator. Negative impulses are blocked as they do not contain any message
information. The ramp generator is turned on using a reference series of impulses which
exactly represent the actual unmodulated position of the pulse. It is turned off by the
impulses coming from the differentiator. Hence, the ramp generator will produce a
triangular wave whose area would be proportional to the delay in PPM pulse. Finally, the
integrator will generate an output level proportional to the message signal.