10-SurendraKhadka
advertisement

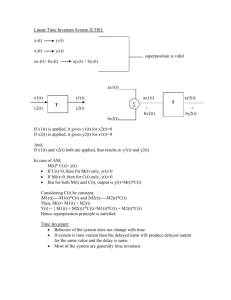
Discrete time convolution: Case iii) When both x[n] and h[n] are of infinite duration: Consider an input x[n] and a unit impulse response h[n] given by x[n]=u[n] h[n] =αn h[n] with 0<α<1 The convolution of x[n] and y[n] can be computed by 1) Analytical method 2) Graphical method Analytical method: We have y[n] = x[n]* h[n] ∞ = ∑ x[k] h[n-k] -∞ ∞ =∑ h[n-k] (since x[k]=0for k<0) k=0 ∞ =∑ α (n-k) u[n-k] ( value of k goes from o to ∞.) k=0 ( Also u[n-k]=1 when k= 0 to n) n = ∑ α n-k k=0 This can be written in the form of = α n + α(n-1)+ ……..+ α+1 n =∑αk k=0 = (α n +α n-1 +α n-2+…….+α+1) *(1-α)/(1-α) = (α n +α n-1 +α n-2+….+α+1-α n+1-α n-α n-1+……….-α-1)/(1-α) =1-α n+1/(1-α) Thus for all n, y[n]= (1-α n+1/1-α)u[n]. 2) Graphical method: The operation of convolution involves sliding of the sequence h[n-k] past x[k].for example ,suppose y[n] is evaluated for some particular value ,say n=n0then we sketch the graph of h[n-k] and x[k].then multiply it and sum the result over k. CONTINUOUS TIME CONVOLUTION: Convolution helps to determine the effect a system has on an input signal. It can be shown that a linear, time invariant system is completely characterized by its impulse response. At first glance, this may appear to be of little use, since impulse functions are not well defined in real applications. However, the shifting property of impulses tells us that a signal can be decomposed into an infinite sum (integral) of scaled and shifted impulses. By knowing how a system affects a single impulse, and by understanding the way a signal is comprised of scaled and summed impulses, it seems reasonable that it should be possible to scale and sum the impulse responses of a system in order to determine what output signal will results from a particular input. This is precisely what convolution does - convolution determines the system's output from knowledge of the input and the system's impulse response. The convolution integral is expressed as -∞ y(t)= ∫ x(Γ)h(t-Γ) dΓ ∞ Representation of continuous –time signals in terms of impulses can be done by taking a pulse or “staircase approximation .In the figure above x(t) is a continuous-time signal. In a discrete this approximation can be expressed as a combination of delayed pulses. For an impulse function: -∞ ∫ ð(t)dt =1 ∞ Now: -∞ ∫ x(t)ð(t)dt =x(0) ∞ Also: -∞ -∞ ∫ x(t)ð(t-Γ)dt = ∫ x(Γ)ð(t-Γ)dt =x(Γ) ∞ ∞ Thus; -∞ X(t) = ∫ x(Γ)ð(t-Γ)dt ∞






![14.41 Problem Set #3 Answer Key 1a) E[U]= (1-α)ln(W+10)+ αln(10)](http://s2.studylib.net/store/data/011609262_1-aca249ae8a1822ddbd34cfe29c3a40ba-300x300.png)
