Seperately Excited DC Generator

EE 327 Signals and Systems
West Virginia University
Separately Excited DC Motor
Prepared by:
Cheri Settell
Jeannine Meyers
Janet Klinkhachorn
Submitted to:
Dr. Ali Jalali, EE327
November 22, 2002
Table of Contents
Abstract
1. Introduction
2. Design Approach
3. Theory
Figure 1, Separately Excited DC Motor Schematic
4. Calculations
MatLab Code
5. Procedure
6. Results
Figure 2, Initial Value Graphs
Figure 3, Increased R f
Graphs
Figure 4, Increased L f
Graphs
Figure 5, Increased both R f
and L f
Graphs
Figure 6, Decreased R f
Graphs
Figure 7, Decreased L f
Graphs
Figure 8, Decreased both R f and L f
Graphs
7. Analysis
Figure 9, Comparison of Rf Values
Figure 10, Comparison of Lf Value
Figure 11, Comparison of Changing Both Rf and Lf Values
8. Conclusion
9. Bibliography
14
15
16
17
18
19
20
22
23
23
24
26
3
4
6
7
7
9
10
11
13
13
2
Abstract
Our team was tasked with finding a way for the armature current, field current, speed, and back emf of a Separately Excited DC Motor to have no attenuation in the graph of the values vs. time. The project had to be simulated using MatLab. Our team used the differential equations pertaining to the speed, armature current, field current, and back emf of the Separately Excited DC Motor to simulate the motor in MatLab. Once the code was written, base values for the field resistance and inductance, and the base values for the armature resistor and inductor were assigned and the simulation ran. After the initial values were taken, the simulation was run again increasing and decreasing the field resistor and inductor values. From the data collected, it was concluded that optimal conditions were reached by decreasing the field inductance from 50 to 25 ohms and leaving the field resistor at 75 ohms.
3
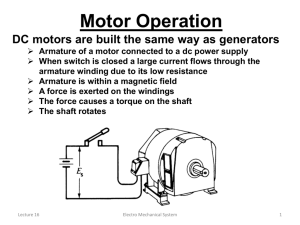
1. Introduction
A DC motor converts electrical power into mechanical power, because of this DC machines are used in special heavy duty applications like draglines, electric trains, and steal mills. They are used for these applications because their speed and torque can easily be varied without suffering a reduction in the efficiency of the machine. A DC machine has two parts: stator and rotor. The stator is the outer part and it is usually stationary.
The rotor rotates inside the stator. The stator houses the field windings, and the rotor houses the armature windings. A DC motor is driven by a DC current supplied to the armature windings. This is called the armature current. There is also current supplied to the field windings, this is called the field current. Since the rotor rotates inside the stator, there is an interaction between the armature current and the field current by way of the magnetic flux created by both of these windings.
1
A torque T d
is formed because of interaction between the flux of the armature and field windings. The speed voltage e a
, also known as the back-emf, is directly proportional to motor speed. It is related by the motor speed constant k v
and the field current i f
. The separately excited motor can be controlled by changing armature voltage, a field voltage, or an armature current. When a motor is operated using its rated armature voltage, armature current, and field current, it is said to be running at its base speed
b
. Armature voltage control is the method of choice if a speed below the base speed is required. If speed above the base speed is required, field current must be changed. As the power output of the motor cannot be greater than its rating, the generated torque declines in over-speed operation.
2
1 http://www.mech.up.edu.au
2 http://murray.newcastle.edu.au
4
The goal of our project was to find a way to have the values of the armature current, field current, speed, and back emf level off with no attenuation in the generated values.
The following report outlines the creation of a simulated Separately Excited DC Motor using MatLab, and discusses the best way to achieve our group’s goal. From the tests conducted, it was concluded the optimal values of back emf, armature current, field current, and speed were obtained with the field resistance and inductance being 75 and 25 ohms respectively. Problem Statement: The values of armature current, field current, speed, and back emf need to have no attenuation in the generated values vs. time.
5
2. Design Approach
I. Research
A. The team began by doing research on how a Separately Excited DC Motor worked and what it consisted of. We went to the Evansdale Library to get books on the subject. There were several books on DC Motors, but none pertaining to simulation of motors in MatLab.
B. After not finding much at the library, the team got on the internet. We looked for any type of information on Separately Excited DC Motors. We found several websites with information pertaining to our project. Most of the information we found was the simulation of a Series DC Motor and the steady state MatLab code for Separately Excited DC Motors. We did not know how the steady state equations were derived from the differential equations, so we decided not to use them, but the differential equations for the characteristics of the Separately
Excited DC Motor we did understand.
II. Design Approach
A.
After researching Separately Excited DC Motors, we decided the best way to implement our design would be to change the differential equations of the
Separately Excited DC Motor into difference equations. These equations could then be put into MatLab and the Separately Excited DC Motor could be simulated.
B.
We decided to measure the back electromotive force, speed, armature current, and field current. From these measurements, we wanted to find the best combination of the four measurements by changing the field resistor and inductor values.
C.
Once our team had decided on how to accomplish our project, we needed to learn how to change a differential equation into a difference equation. We visited Dr.
Choudry. He taught us how to make a differential equation into a difference equation. Then we needed to put the equation into MatLab. We then went to Dr.
Jalali to learn how to put the difference equation into MatLab. After talking to
Dr. Jalali, we were able to complete our program.
6
3. Theory
A DC motor consists of a stationary cylindrical object called the stator, and a rotating cylindrical object inside of the stator called the rotor. The stator consists of electromagnetic poles called the field windings. In Figure 1, the Separately Excited DC
Motor is modeled electrically. R a
and L a
are the armature resistance and inductance. I a
is the armature current. V a
is the applied voltage to the armature. In our experiment, this value is represented by a V t
. E a
is the back emf produced. L f
and R f
are the field inductance and resistance. V f
is the applied field voltage. T
L
is the load torque. J is the moment of inertia, and ω is the speed. In our project, we neglected B, the friction coefficient.
3
Figure 1 4
Separately Excited DC Motor
When an input voltage is applied to the field windings, the equation that relates the field voltage (V f
) and the field current (I f
) is as follows:
V f
= R f
I f
+ L f dI f
/dt
5
R f
is the field resistance
L f
is the field inductance
The input field voltage and input field current control the speed, induced electromotive force (E a
), terminal voltage (V t
), and armature current (I a
). The rotor consists of the armature windings. When an input voltage is applied to the field terminals of a DC motor, the terminal voltage (V t
) and the armature current (I a
) is related through the following equation:
V t
= I a
R a
+ E a
+ L a dI a
/dt
6
R a
is the armature resistance
L a
is the armature inductance
3 http://www.avere.org
4 http://murry.newcastle.edu.au
5 http://newcastle.edu.au
6 http://newcastle.edu.au
7
Once the field and terminal voltages are found, the speed of the rotor can be found.
Using the voltage constant (K e
), the speed of the rotor (ω) is dictated by the equation:
Jdω / dt = T e
- T
L
7
T e
= K e
I f
I a
T e
is the electrical torque
T
L
is the load torque
J is the moment of inertia
A magnetic field is created by the field windings; when the armature rotates in this magnetic field, a voltage is induced in the armature winding. This voltage is referred to as the back emf (E a
). It can be found by the following equation:
E a
= K e
* I f
*ω
8
Using all four equations, the separately excited DC motor can be controlled directly by applied armature voltage, armature current, and field current.
7 http://newcastle.edu.au
8 http://newcastle.edu.au
8
4. Calculations
I. Initial Conditions
A. K e
=0.33
B. V f
=150 VDC V t
=100 VDC
C. R a
= 0.9 Ω
L a
= 0.01 H
D. R f
= 75 Ω
E. J= 0.2 kg
m
2
F. T
L
= 5 N
m
L f
= 50 H
G. Time limit is 10 seconds and dt =0.001
H. Initial Armature Current (I0), field current (I1), and speed (w0) are set at zero
I. Definiation of the intergral
9
: I(t + Δt) – i(t)] / Δt
II. Field Current Equation
A.
V f
= R f
I f
+ L f dI f
/dt
10
B.
Using the definition of the integral, the field current equations is as follows:
1. dI a
/ dt = [(V t
– I a
R a
– E a
) / L a
]
2. [I a
(t + Δt) – i a
(t)] / Δt] = [(V t
– I a
R a
– E a
) / L a
]
3. I a
(t + Δt) = i a
(t) + Δt * [(V t
– I a
R a
– E a
) / L a
]
C. This equation is represented in MatLab as: Ia = I1 + dt*(Vt – (Ra*I1) – ea) / La
III. Armature Current Equation
A. V t
= I a
R a
+ E a
+ L a dI a
/dt
11
B. Using the definition of the integral, the armature current equations is as follows:
1. dI f
/ dt = [(V f
– I f
R f
) / L f
]
2. [I f
(t + Δt) – i f
(t)] / Δt] = [(V f
– I f
R f
) / L f
]
3. I f
(t + Δt) = i f
(t) + Δt * [(V f
– I f
R f
) / L f
]
C. This equation is represented in MatLab as: If = I0 + dt*(Vf – (Rf*I0)) / Lf
IV. Speed
A. Jdω / dt = K e
I f
I a
- T
L
12
B. Using the definition of the integral, the speed of the rotor equations is as follows
1. dω / dt = [(K e
I f
I a
– T
L
) / J]
2. [ω(t + Δt) – ω (t)] / Δt] = [(0.33I
f
I a
– T
3. ω (t + Δt) = ω (t) + Δt * [(0.33I
f
I a
– T
L
) / J]
L
) / J]
C. This equation is represented in MatLab as: w = w0 + dt * ((0.33*I0*I1) – T1) / J
V. Back emf
The equation is not a differential equation, but varies with the armature current and speed. The equation represented in MatLab is as follows: ea = 0.33*I0*w0
VI. MatLab code
9 Kirk, Donald and Robert Strum
10 http://newcastle.edu.au
11 http://newcastle.edu.au
12 http://newcastle.edu.au
9
Ra=0.9; La=0.01;
Rf=75; Lf=25;
Tl=5;
J=0.2;
Vf=150; Vt=100; k=0;
CurrentIf=[1:10000];
Backemf=[1:10000];
CurrentIa=[1:10000];
Speed=[1:10000];
I0=0;
I1=0; ea=0; w0=0; dt=0.001; for t=0:0.001:10;
If=I0+dt*(Vf-(Rf*I0))/Lf;
Ia=I1+dt*(Vt-(Ra*I1)-ea)/La;
w=w0+dt*((0.33*I0*I1)-Tl)/J;
ea=0.33*I0*w0;
k=k+1;
CurrentIf(k)= If;
CurrentIa (k)=Ia;
Speed (k)=w;
Backemf (k)=ea;
I0=If;
I1=Ia;
w0=w; end subplot (2,2,1), plot (Backemf),
title ('Backemf'),
ylabel ('Backemf'),
xlabel ('1*10^-3 s') subplot (2,2,2), plot (CurrentIf),
title ('Field Current'),
ylabel ('Current'),
xlabel ('1*10^-3 s') subplot (2,2,3), plot (CurrentIa),
title ('Armature Current'),
ylabel ('Current'),
xlabel ('1*10^-3 s') subplot (2,2,4), plot (Speed),
title ('Speed'),
ylabel ('Radians'),
xlabel ('1*10^-3 s')
10
5. Procedure
I. Equipment
A. Computer with MatLab software
B. MatLab software
C. Disk
D. Printer
II. Procedure
A.
Research
1. The schematic for a Separately Excited DC Motor was shown in Figure , on page .
2. The differential equations for the Separately Excited DC Motor are shown in the Theory section of this report.
3. The method in which the differential equations were transformed into the difference equations is shown in the Calculations section of this report.
B.
Initial Values
1. To start the project, initial values for the field resistor and inductor, armature resistor and inductor, moment of inertia, load torque, and the terminal and field voltage values had to be given. Our team chose the values based on a problem taken from West Virginia University class EE335. The initial values are listed in the MatLab code in the calculations section of this report.
2. The initial values for the speed, armature current, and field current had to be set to zero.
C.
Writing the Program
1. The values for the resistors (R a
and R f
), inductors (L a
and L f
), moment of inertia (J), load torque (T
L
), field voltage (V f
), and terminal voltage (V t
) were placed in MatLab
2. Four matrixes were created. The matrices were 1 x 10000. These matrices would contain the values generated by the program for speed.
(Speed=[1:10000], armature current (Current Ia=[1:10000]), field current
(CurrentIf=[1:10000]), and back emf (Backemf=[1:10000]).
3. The initial speed (w0), armature current (I1), and field current (I0) were placed in MatLab as zero values.
4. The increment of summations was decided to be 0.001 and placed in MatLab as dt =0.001.
5. A for loop was placed in MatLab. The purpose of the loop was to increment
10,000 times. The following equations were then entered in to MatLab in the for loop: a. If=I0+dt*(Vf-(Rf*I0))/Lf; b. Ia=I1+dt*(Vt-(Ra*I1)-ea)/La; c. w=w0+dt*((0.33*I0*I1)-Tl)/J; d. ea=0.33*I0*w0;
An increment was placed before the four matrices so that the values would be placed in the correct spot within the matrix. This was done by placing k=k+1
11
after the equations within the for loop. The values of the speed, armature current, field current, and the back emf were placed in the first column of the matrix. Then the initial values were redefined as the calculated values. This is seen by the following equations: a.
I0=If; b.
I1=Ia; c.
w0=w;
Then the loop was ended.
6. The plots of speed, armature current, field current, and back emf were then subploted as follows: a. subplot (2,2,1), plot (Backemf), title ('Backemf'), ylabel ('Backemf'), xlabel ('1*10^-3 s') b. subplot (2,2,2), plot (CurrentIf), title ('Field Current'), ylabel ('Current'), xlabel ('1*10^-3 s') c. subplot (2,2,3), plot (CurrentIa), title ('Armature Current'), ylabel ('Current'), xlabel ('1*10^-3 s') d. subplot (2,2,4), plot (Speed), title ('Speed'), ylabel ('Radians'), xlabel ('1*10^-3 s')
7.
This concluded the writing of the program.
D.
Running the Program
1. The team decided the best way to change the speed, armature current, field current, and back emf would be to change the values of the field resistor and inductor.
2. The program was run with the initial R f
=75 ohms and the L f
=50 ohms. This was the basis for which the other changes would be compared to.
3. Increasing the values of R f
and L f
. a. R f
was increased to 100 ohms and the program ran. b. L f
was increased to 75 ohms and the program ran. c. Both the values of R f
=100 ohms and L f
=75 ohms were used.
4. Decreasing the values of R f
and L f
. a. R f
was increased to 50 ohms and the program ran. b. L f
was increased to 25 ohms and the program ran. c. Both the values of R f
=50 ohms and L f
=25 ohms were used.
12
I. Initial Values.
A. R f
= 75 ohms
B. Lf= 50 ohms
6. Results
Figure 2
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
13
II. Increasing R f
to 100 ohms
Figure 3
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
14
III. Increasing L f
to 75 ohms
Figure 4
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
15
IV. Increasing R f
to 100 ohms and L f
to 75 ohms
Figure 5
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
16
V. Decreasing R f
to 50 ohms
Figure 6
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
17
VI. Decreasing L f
to 25 ohms
Figure 7
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
18
VII. Decreasing both R f
to 50 ohms and L f
to 25 ohms
Figure 8
Graphs of Speed, Armature Current, Field Current, an Back emf vs. time
19
7. Analysis
I. Initial Values
A. Back emf: the graph increases exponentially for 2.5 seconds to about 95 volts and then decreases gradually over the next 7.5 seconds to about 92 volts. This is a satisfactory graph of back emf.
B. Field Current: the graph increases exponentially for 3.75 seconds and then levels off at 2 amps for the remaining ten seconds. This is an excellent graph for current.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 2.5 seconds to about 10 amps. This is an acceptable graph.
D. Speed: The speed increases exponentially for 1.9 seconds to 150 rad/s and then decreases to about 140 rad/s gradually for the remaining ten seconds. This is a bad graph.
II. Increasing R f
from 75 to 100 ohms
A. Back emf: the graph increases exponentially for 3.75 seconds to about 92 volts and then levels off. This is an excellent graph of back emf.
B. Field Current: the graph increases exponentially for 2.5 seconds and then levels off at 1.5 amps for the remaining ten seconds. This is an excellent graph for current. From the initial conditions (IC), the current levels off 1.25 seconds faster, but half an amp is lost.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 3.75 seconds to about 10 amps. This is an excellent graph. From the IC, the current does not level off until
1.25 seconds later and the current is the same.
D. Speed: The speed increases exponentially for 3.75 seconds to 180 rad/s and levels off for the remaining ten seconds. This is an excellent graph. From the IC, the speed levels off 1.85 seconds later and the speed is increased by 30 Hz.
III. Increasing L f
from 50 to 75 ohms
A. Back emf: the graph increases exponentially for 2.5 seconds to about 95 volts and then decreases gradually over the next 7.5 seconds to about 92 volts. This is a satisfactory graph of back emf. From the IC, no values changed.
B. Field Current: the graph increases exponentially for 5 seconds and then levels off at 2 amps for the remaining ten seconds. This is an excellent graph for current.
From the IC, the current took an additional 1.25 seconds to level off.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 2.5 seconds to about 7 amps.
Next, the current increases to about 10 amps gradually for the remaining ten seconds. This is bad graph. From the IC, the first 2.5 seconds are close, and the current is the same.
20
D. Speed: The speed increases exponentially for 1.9 seconds to 160 rad/s and then decreases to about 140 rad/s gradually for the remaining ten seconds. This is a bad graph. From the IC, the only difference in this graph is ten hertz is gained.
IV. Increasing R f
from 75 to 100 ohms and L f
from 50 to 75 ohms
A. Back emf: the graph increases exponentially for 3.75 seconds to about 90 volts and levels off. This is a good graph of back emf. From the IC, it takes 1.25 more seconds to peak, but the voltage stays leveled off.
B. Field Current: the graph increases exponentially for 3.75 seconds and then levels off at 1.5 amps for the remaining ten seconds. This is an excellent graph for current. From the IC, the rise time is the same, but half an amp is lost.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 3.75 seconds to about 10 amps and levels off. This is an excellent graph. From the IC, it takes 1.25 seconds more to level off.
D. Speed: The speed increases exponentially for 3.75 seconds to 185 rad/s and levels off. This is a good graph. From the IC, the speed takes an additional 1.85 seconds to level off, and increases by 35 hertz.
V. Decreasing R f
from 75 to 50 ohms
A. Back emf: the graph increases exponentially for 1.25 seconds to 100 volts and then decreases gradually over the next 7.5 seconds to about 95 volts. This is a bad graph of back emf. From the IC, the voltage increases 1.25 seconds faster and there is a ten volt increase.
B. Field Current: the graph increases exponentially for 5 seconds and then levels off at 3 amps for the remaining ten seconds. This is an excellent graph for current.
From the IC, the current takes 1.25 seconds longer to level off, and the current is increased by one amp.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 2.5 seconds to 2 amps.
Next, the current increases gradually to 7 amps during the remaining ten seconds.
This is a bad graph. From the IC, the fall time is the same, but eight amps of current is lost and then gained back.
D. Speed: The speed increases exponentially for 1.25 seconds to 125 rad/s and then decreases to about 99 rad/s gradually for the remaining ten seconds. This is a bad graph. From the IC, the speed increases faster by 0.65 seconds. The recorded speed is 25 hertz less than the peaked IC and about 40 hertz less than the leveled off speed.
VI. Decreasing L f
from 50 to 25 ohms
A. Back emf: the graph increases exponentially for 1.9 seconds to about 95 volts and levels off for the remaining ten seconds. This is an excellent graph of back emf.
From the IC, the voltage increases 0.6 seconds faster and stays at the same voltage.
B. Field Current: the graph increases exponentially for 1.9 seconds and then levels off at 2 amps for the remaining ten seconds. This is an excellent graph for
21
current. From the IC, the current rises 1.85 seconds faster, and the current stays the same.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
Then the current decreases exponentially for the first 1.9 seconds to about 10 amps. This is an excellent graph. From the IC, the current falls 0.6 seconds faster, and the current stays the same.
D. Speed: The speed increases exponentially for 1.9 seconds to 140 rad/s and levels off for the remaining ten seconds. This is an excellent graph. From the IC, the speed levels of at the same time, but looses ten hertz.
VII. Decreasing R f
from 75 to 50 ohms and Lf from 50 to 25 ohms
A. Back emf: the graph increases exponentially for 1.25 seconds to about 95 volts and then decreases gradually over the next 7.5 seconds to about 95 volts. This is an okay graph of back emf. From the IC, the voltage rose 1.25 seconds faster.
B. Field Current: the graph increases exponentially for 2.5 seconds and then levels off at 3 amps for the remaining ten seconds. This is an excellent graph for current. From the IC, the current raised 1.25 seconds faster and increased one amp.
C. Armature Current: the graph starts at zero and increases directly to 115 amps.
The current decreases exponentially for the first 1.25 seconds to about 2 amps, and then gradually increases to about 8 amps. This is an bad graph. From the IC, the current falls 1.25 seconds faster, but current is lost.
D. Speed: The speed increases exponentially for 1.25 seconds to 110 rad/s and then decreases to about 98 rad/s gradually for the remaining ten seconds. This is a bad graph. From the IC, the speed increases faster, but 40 hertz is lost.
VIII. Comparison of all values
A. All values bolded are excellent graphs.
B. R f
values comparison
Time
Back emf
Field Current
Armature Current
Speed
Back emf
Field Current
Armature Current
Speed
Figure 9
Comparison of Rf
IC
115
140
Rf inc Rf dec
2.5 3.75 1.25
3.75 2.5
2.5 3.75
115
180
5
2.5
1.9 3.75 1.25
92 92 95
2 1.5 3
115
99
22
C. L f
values comparison
Time
Back emf
Field Current
Armature Current
Speed
Back emf
Field Current
Armature Current
Speed
Figure 10
Comparison of Lf
D. Both R f
and L f
values
Time
Back emf
Field Current
Armature Current
Speed
Back emf
Field Current
Armature Current
Speed
Figure 11
Comparison of both values
IC
2.5
3.75
2.5
1.9
92
2
115
140
Lf inc Lf dec
2.5
5
2.5
1.9
95
2
115
140 140
1.9
1.9
1.9
1.9
95
2
115
IC B inc B dec
2.5 3.75 1.25
3.75 3.75 2.5
2.5 3.75 1.26
1.9 3.75 1.25
92
2
90
1.5
95
3
115
140
115
185
115
98
23
8. Conclusion
The goal of this project was to have no attenuation in the graphs of the armature current, field current, speed, and back emf vs. time for a Separately Excited DC Motor.
We were tasked with finding a way to simulate the motor using MatLab. The team decided the best way to simulate the motor would be by finding the differential equations of the speed, armature current, field current, and back emf of the motor. Then using the equations, find a way to have no attenuation in the graphs by changing the field resistance and inductance values.
The first obstacle our team encountered was how to change the differential equations of the motor into difference equations. After talking to Dr. Jalali, the team learned how to change the differential equations of the motor into difference equations using the definition of the integral. After we were able to calculate the motor equations for discrete time, the second obstacle was writing the MatLab code. No one in our group had any real experience using the program. It was only after hours of research including the internet, library, and talking again to Dr. Jalali, we were able to even begin our
MatLab code. Once the code was written, finding the optimal values for Rf and Lf was simply a process of changing the values one at a time.
From the data collected, we discovered two possible solutions to our problem.
The first possible solution was to increase the field resistance by 25 ohms. This created graphs with no attenuation, but the rise and fall time increased by 1.25 seconds from the
24
initial conditions, and half an amp was lost in the field current and the speed of the motor increased thirty hertz. The second possible solution was decreasing the field inductance by 25 ohms. This also created a graph with no attenuation. The rise and fall time for these graphs decreased 0.6 seconds from the initial conditions and the values of the speed, armature current, field current, and back emf remained the same. Our group decided the second solution was going to be our solution to our project.
The group decided on the second solution was most favorable since none of the initial values of speed, armature current, field current, and back emf changed. The only thing that changed was the decrease in the rise and fall time, and this was an excellent outcome. There for our group concluded, the field resistance should remain at 75 ohms, and the field inductance should be 25 ohms to produce the optimal values of armature current, field current, speed, and back emf.
25
9. Bibliography
1.
http://newcastle.edu.au/users/students/2000/c9504876/dcmotors.html
2.
http://www.avere.org/working/en/electric.html
3.
http://www.mech.uq.edu.au/cources/mech3760/chap25/s1.htm
4.
Kirk, Donald and Robert Strum. Contemporary Linear Systems. California:
Brooks/Cole, 2000. (Kirk and Strum 366-374)
5.
No Author. MatLab Student Version. 2000.
26