BER Sensitivity to Mis-Timing in Ultra
advertisement

IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
1
BER Sensitivity to Mis-Timing in Ultra-Wideband
Impulse Radios, Part I: Non-Random Channels
Zhi Tian, Member, IEEE, and Georgios B. Giannakis, Fellow, IEEE
Abstract— We investigate timing tolerances of ultra wideband
(UWB) impulse radios. We quantify the bit-error-rate (BER)
sensitivity to epoch timing offset under different operating conditions, including AWGN and frequency flat fading channels, dense
multipath fading channels, multiple access with time hopping,
and various receiver types including sliding correlators and
RAKE combiners. Our systematic approach to BER derivations
under mis-timing can be extended to a wide range of channel
fading types. Through analyses and simulations, we illustrate that
the reception quality of a UWB impulse radio is highly sensitive to
both timing acquisition and tracking errors. In particular, timehopping based multiple-access systems exhibit little tolerance to
acquisition errors, and the energy capture capability of a RAKE
combiner can be severely compromised by mis-timing.
Index Terms— ultra wideband communications, synchronization, mis-timing, RAKE receiver, modeling, performance analysis
I. I NTRODUCTION
Ultra wideband (UWB) impulse radios (IRs) convey information symbols using a stream of impulse-like carrier-less
pulses of very low power density and ultra-short duration –
typically a few tens of pico-seconds to a few nanoseconds. The
ultra-wide bandwidth exposes signals to fine time resolution,
and offers potential for ample multipath diversity. It has been
demonstrated that the fading margin required to compensate
for dense multipath is much lower than what is needed for
narrowband communications [1]. These properties position
UWB as a favorable candidate for short-range indoor highspeed wireless communications [2], and for outdoor ad-hoc
networking with low probability of detection and capability to
overlay existing wireless systems [3].
The unique advantages of UWB IR technology are somewhat encumbered by stringent timing requirements because
the transmitted pulses are very narrow and have low power.
Accurate timing imposes major challenges to UWB systems
in realizing their potential bit error rate (BER) performance,
capacity, throughput and network flexibility. It has been shown
through simulations that system throughput degrades markedly
for relatively modest increase in timing jitter, and even diminishes when the pulse-level tracking error is only a tenth of the
Manuscript received April 23, 2003; revised November 4, 2003. Z. Tian was
supported by the NSF Grant No. CCR-0238174; G.B. Ginnakis was supported
by ARL/CTA Grant No. DAAD19-01-2-011 and the NSF Grant No. EIA0324804. Parts of the work in this paper were presented at the IEEE SPAWC
Conf., Rome, Jun. 2003, and the IEEE GLOBECOM Conf., San Franscisco,
Dec. 2003.
Z. Tian is with the ECE Department, Michigan Technological University,
Houghton, MI 49931. Email: ztian@mtu.edu.
G. B. Giannakis is with the ECE Department, University of Minnesota,
Minneapolis, MN 55455. Email: georgios@ece.umn.edu.
pulse duration [4]. However, neither multipath is considered
in [4], nor is the impact of symbol-level acquisition errors.
The operating conditions of UWB systems vary in different
applications. Outdoor propagation is typically dominated by
a direct path, while indoor settings entail dense multipath
propagation [5]. Time hopping (TH) is typically employed
to enable multiple access, and smooth the transmit spectrum
[2]. In a rich-multipath environment, the system performance
heavily relies on the receiver structure, which ranges from a
simple sliding correlator to various types of RAKE combiners.
The diverse mechanisms of direct path versus dense multipath
propagation, with and without TH, as well as the various
receiver options, lead to different implications of the timing
acquisition and tracking errors. This paper addresses the timing
tolerances of UWB IR transmissions for a broad range of
operation settings. Sensitivity to mis-timing is investigated
by quantifying the BER degradation due to both acquisition
and tracking errors. Both pulse amplitude modulation (PAM)
and pulse position modulation (PPM) are considered. Such
analyses shed light on the implications of mis-timing to UWB
impulse radio design, and guide the design of allowable margins for timing offset estimation in UWB system development.
In our BER sensitivity analysis, we adopt a two-step procedure that is often carried out for performance analysis over
fading channels. First, the BER is expressed as a Q(·) function
that depends on the given realization of the random channel
parameters. This instantaneous performance is then integrated
over the joint probability density function (pdf) of the random
parameters to obtain the average BER. The overall analysis is
presented in a two-part sequel. Here, Part I outlines our system
model and operating transceiver conditions in the ensuing
Section II. For PAM transmissions under various operating
conditions, Section III analyzes the BER degradation induced
by mis-timing for fixed channel realizations, with illustrative
figures shedding light on the implications of mis-timing in
different propagating environments. Part II will focus on BER
analysis in fading channels [6]. The energy capture capability
of RAKE receivers under mis-timing will be quantified in a
unified manner. Results for PPM will also be summarized
in [6], along with extensive corroborating simulations. Motivated by current UWB implementations, we focus on binary
modulation and confine our discussions to binary PAM/PPM
throughput this sequel.
II. M ODELING
A UWB pulse p(t) has ultra-short duration T p at the
(sub-)nanosecond scale, and its maximum permissible average
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
transmit power is in the order of 0.5mW according to the
FCC mask [7]. In IR, every information symbol is transmitted
using Nf pulses p(t) over Nf frames (one pulse per frame of
frame duration T f Tp ), which is equivalent to sending each
Nf −1
symbol through a transmit filter p s (t) = i=0
p(t − iTf ) of
symbol duration T s := Nf Tf . For multiple access, the user of
interest suppresses multiple access interference (MAI) using a
pseudo-random TH code sequence c(i) ∈ [0, N c − 1], which
time-shifts each pulse position at multiples of the chip duration
Tc , with Nc Tc ≤ Tf [2]. A system choosing a larger value for
Nc typically allows for a larger user capacity. These codes hop
on a frame-by-frame basis, but the hopping pattern remains
invariant from symbol to symbol 1 , i.e., c(i) = c(i + lNf ), ∀l,
and i ∈ [0, Nf − 1]. The transmit filter with TH is given by
Nf −1
ps (t) = i=0
p(t − iT
f − c(i)Tc ), which is scaled to have
unit energy by setting p2 (t)dt = 1/Nf . With informationbearing binary PAM symbols s(k) ∈ {±1} being independent
identically distributed (i.i.d.) with zero mean and average
transmit energy per symbol E s , the transmitted pulse stream
is [8]:
∞
s(k)ps (t − kNf Tf ).
(1)
u(t) = Es
k=0
After propagating through a multipath channel, the received
signal takes on the general form
L
r(t) =
αl u(t − τl ) + v(t)
(2)
l=0
L
= Es
l=0
Nf−1
∞
αl s(k) p(t−kNf Tf −iTf −c(i)Tc −τl )+v(t),
k=0
i=0
where (L+1) is the total number of propagation paths, each
with gain αl being real-valued with phase shift 0 or π, and
delay τl satisfying τl < τl+1 , ∀l. The channel is random and
L
quasi-static, with {αl }L
l=0 and {τl }l=0 remaining invariant
within one symbol period, but possibly changing independently from symbol to symbol. The additive noise term v(t)
consists of both ambient noise and MAI, and is independent
L
of s(k), {αl }L
l=0 , and {τl }l=0 . We focus on performance
evaluation of the desired user, treating the composite noise
v(t) as a white Gaussian random process with zero-mean and
power spectral density of N o /2. This assumption is widely
used in performance analysis of communication systems, and
is justified at least for low SNR values, low data rates, or large
spreading factors N f Nc [9].
Two special cases of fading channels arise: when L = 0,
the channel is frequency flat, as considered in outdoor UWB
ranging systems [10]. Indoor propagation channels, on the
other hand, are typically characterized by dense multipath,
i.e., L 0 and τl+1 − τl < 2Tp , ∀l; see e.g., [11]-[14]. To
isolate the channel delay spread, we define relative path delays
τl,0 := τl −τ0 for l ∈ [0, L]; the maximum delay spread is thus
τL,0 +Tp . We select Tf ≥ τL,0 +2Tp and set either c(Nf−1) =
1 Other hopping patterns may also be used, such as long-code hopping in
which the TH codes repeat after several symbols, or slow hopping in which
the TH codes hop on a symbol-by-symbol basis but remain invariant for
all frames within a symbol. The results derived in this paper can be easily
generalized to other TH patterns.
2
(a) Tx
u (t )
s[n]
s[n −1]
Tf
ps (t )
Tc
t
ε
τ 0 = n f Tf + ε
r (t )
(b) Rx
(single-path)
s[n −1]
s[n]
g s)(t )
ps (t
t
(c) Rx
(multipath)
r (t )
s[n −1]
s[n]
hs (t )
t
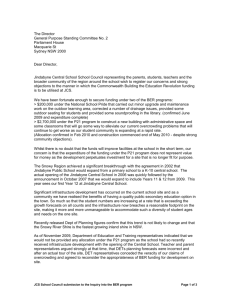
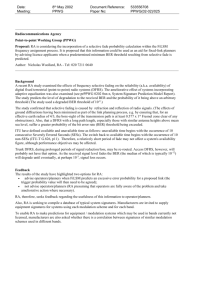
Fig. 1. Timing offsets in UWB impulse radios: Nf = 3, Tc = Tf /3,
and the TH code sequence is [0, 2, 0]. (a) transmitted waveform, (b) received
waveform in the single-path case, (c) received waveform in the multipath case.
Vertical dashed lines are frame boundaries with reference to the receiver’s
clock (τ̂ = 0 and τ = τ0 ). In this example, the symbol-level acquisition error
is (N = 1)Tf , while the pulse-level tracking error is = 2Tc + Tp ∈
[−Tp , Tf − Tp ).
0 or c(Nf − 1) ≤ c(0) to avoid inter-symbol interference
(ISI) and intra-symbol interference when perfect timing can
be acquired. With these definitions, the composite channel
formed by convolvingthe physical channel with the pulse
L
is given by h(t) :=
l=0 αl p(t − τl,0 ), and the equivalent
received symbol-waveform
of duration T
s can be expressed
Nf −1
L
as hs (t) := j=0
h(t − jTf − cj Tc ) = l=0 αl ps (t − τl,0 ),
which simplifies r(t) to
r(t) =
∞
Es
s(k)hs (t − kTs − τ0 ) + v(t).
(3)
k=0
A correlation-based receiver correlates r(t) with a locally
generated pulse train p s (t), time-shifted by a nominal propagation delay τ̂ , to produce the sufficient statistic for symbol
detection:
(n+1)Ts +τ̂
r(t)ps (t − nTs − τ̂ )dt.
(4)
y(n) =
nTs +τ̂
Let us denote the timing mismatch as τ := τ 0 − τ̂ = N Tf +,
where N ∈ [0, Nf − 1], and ∈ [−Tp , Tf − Tp ). The
parameters N Tf and indicate the breakdown of mis-timing
into acquisition and tracking errors, respectively; see Fig. 1
for graphical illustration of the timing information in both the
frequency flat case and the dense multipath case. Notice that
N is limited to Nf finite values, since timing is resolvable
only within a symbol duration.
While this correlation receiver is suitable for AWGN and
flat fading channels, channels inducing frequency selective
fading call for the use of RAKE receivers to collect the ample
multipath diversity. As indicated by (3), the maximum energy
capture under perfect timing can be achieved by using h s (t)
as the receive-template for optimum matched filtering, which
requires knowledge of the multipath channel. To investigate
how mis-timing may compromise the capability of RAKE
reception in energy capture, we adopt a generic RAKE receiver
structure with (L + 1) fingers, as shown in Figure 2. The
RAKE tap delays {τ̃l ,0 }L
l =0 are design parameters that could
be, but not necessarily, chosen among the channel path delays
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
3
TABLE I
III. C ONDITIONAL BER S ENSITIVITY FOR PAM
VARIOUS T YPES OF O PERATING C ONDITIONS
Parameters
N −1
Channel type
f
L = 0, L = 0, {c(i)}i=0
= 0 frequency flat
N −1
f
L = 0, L = 0, {c(i)}i=0
= 0 frequency flat
L 1, L = 0
dense multipath
L 1, 1 L ≤ L
dense multipath
Receiver type
MA
correlator
no
correlator
correlator
RAKE
yes
yes/no1
yes/no1
1
Both cases of multiple access are subsumed, depending on whether
TH codes are employed.
{τl,0 }L
l=0 . In fact, we are motivated not to set L = L and
τ̃l,0 = τl,0 in dense multipath, because a large number of
RAKE fingers L could lead to computationally prohibitive
RAKE combining, not to mention the difficulty in estimating
L
accurately both {α l }L
l=0 and {τl,0 }l=0 . Alternatively, we may
resort to a RAKE structure with equally-spaced taps, i.e.,
τ̃l ,0 := l Tr , with tap spacing T r ≥ Tp , and a maximum
tap delay τ̃L ,0 ≤ Tf − 2Tp . A full RAKE arises when
L = L and each τ̃l ,0 is matched to one of the delayed
paths, while L < L corresponds to a “partial RAKE”, which
may be less effective in energy capture, but computationally
more affordable. In particular, the sliding correlator can be
considered as a “RAKE-1” receiver with L + 1 = 1 [14]. The
RAKE weights wl can be selected to represent maximum ratio
combining, equal-gain combining, or other linear combining
techniques. For all these combiners, the correlation
template
L (rc)
ps (t) in (4) is replaced by p s (t) = l =0 wl ps (t − τ̃l ,0 ).
Both the sliding correlator and the RAKE receiver rely on
the correlation between the transmit filter and the receiver
template. Therefore, symbol detection hinges on the properties
of the normalized auto-correlation function of p(t), defined
∞
as Rp (τ ) := Nf −∞ p(t)p(t − τ )dt ∈ [−1, 1]. With these
definitions, we combine (2) and (4) to reach a unifying
expression for the detection statistic:
(n+1)Ts +τ̂
r(t)ps(rc) (t − nTs − τ̂ )dt
y(n) =
=
0
nTs +τ̂
Nf Tf
r(t + nNf Tf + τ̂ )
L
wl ps (t − τ̃l ,0 )dt
l =0
Nf −1 Nf −1 L L
∞
Rp (Λp )
s(k)
wl αl
+ v(n), (5)
= Es
Nf
i=0 j=0
k=0
l=0 l =0
where Λp := (k − n)Nf Tf + (i − j)Tf + (c(i) − c(j))Tc +
N Tf + + τl,0 − τ̃l ,0 . For convenience, let y s (n) :=
y(n) − v(n) represent the noise-free (signal) component of
the decision statistic. When the RAKE taps are normalized
L
2
by
l =0 wl = 1, the noise term v(n) is Gaussian with
zero mean and variance σ v2 = (No /2). It is worth stressing
that (5) subsumes various operating conditions in terms of
channel types, TH codes, and receiver structures, of which
the interesting scenarios are listed in Table I. Stringent timing
requirements come from the fact that R p (τ ) has a very narrow
non-zero support. In (5), the values for k, i, and j contribute
non-zero summands to y(n) only when there exist l and l such
that the corresponding Λ p falls in the range of (−T p , Tp ), for
given N and . We will henceforth term such triplets (k, i, j)
as non-trivial.
In this section, we investigate the impact of incorrect timing
(τ = τ0 − τ̂ = 0) on the symbol detection performance,
L
conditioned on fixed channel realizations {α l }L
l=0 and {τl }l=0 .
We will start with a UWB transmission over a simple AWGN
channel, demodulated with a sliding correlator receiver. A
single-user system (no TH) and a multiple-access system
(with TH) will be discussed separately to illustrate the distinct
impact of TH on the BER sensitivity. We will then proceed to
the dense-multipath case; both correlation-based and RAKEbased receivers will be studied to compare their capability in
energy capture and robustness to mis-timing. Throughout our
analysis, we suppose that the receiver is able to achieve correct
TH code synchronization after timing acquisition and tracking.
A. TH-free PAM Transmissions over AWGN Channels
When a TH-free UWB PAM signal propagates through a
direct-path AWGN channel, we substitute L = 0, L = 0, and
c(i) = 0, ∀i, in (5), which simplifies the detection statistic to
ys (n) =
Nf −1 Nf −1
∞
Es
s(k)
w0 α0 Rp (Λp )/Nf ,
k=0
i=0
(6)
j=0
where Λp = (k − n)Nf Tf + (i − j)Tf + N Tf + . Note that
some of the terms in Λ p are multiples of T f Tp . To identify
non-trivial triplets (k, i, j) that satisfy Λ p ∈ (−Tp , Tp ), it is
instrumental to isolate those frame-level terms from the pulselevel terms. To this end, we introduce an integer q, which is
set such that the frame-level portion of Λ p is zero, and the
pulse-level portion of Λ p falls in (−Tp , Tp ):
I. (frame-level) (k−n)N f Tf +(i−j)Tf +N Tf +qTf = 0;
II. (pulse-level) −qT f ∈ (−Tp , Tp ).
(7)
Condition (7.II) determines the allowable values for q and ,
while (7.I) describes the constraint on the triplet (k, i, j) to
yield an admissible q. Since ∈ [−T p , Tf − Tp ), it is evident
from (7.II) that the only possible value for q is q = 0, which
in turn confines the allowable range for to be (−T p , Tp ).
Meanwhile, since i, j, N ∈ [0, Nf − 1], the non-trivial values
for k can be deduced from (7.I) to be (k − n)N f = −(i − j) −
N − q ∈ [−2(Nf − 1), (Nf − 1)], which leads to (k − n) ∈
{0, −1}. For each possible value of k, the associated i and j
are further constrained such that i = j − N − q − (k − n)Nf
falls in [0, Nf − 1]. When j ∈ [N + q, Nf − 1], the constraint
i < Nf excludes k−n = −1; hence k = n and i = j −N −q.
Similarly, j ∈ [0, N + q − 1] leads to k = n − 1, and i =
j − N − q + Nf . With these constraints on q and (k, i, j), it
follows from (7) that Λ p = , and the received signal in (6) is
simplified to
Nf −1
N
−1
R
R
()
()
p
p
ys (n) = w0 α0 Es
s(n)
+
s(n−1)
Nf
N
f
j=0
j=N
N
N
= w0 α0 Es Rp () (1−
)s(n) +
s(n−1) . (8)
Nf
Nf
To evaluate BER performance in the presence of timing
errors, we look at y s (n) conditioned on (s(n), s(n − 1)).
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
s(t)
Fig. 2.
- Xk - Delay
τ0+τ0,0
..
α0 6
.
?
- Xk - Delay - +k r(t)- Delay
τ0+τl,0
−τ̂
6
αl 6
..
.
- Xk - Delay
τ0+τL,0
αL6 Multipath Channel
4
- Xk- (·)dt ys,0 (n)
- w0
.
..
6
p(t − τ̃0,0 )
?
- Xk- (·)dt ys,l (n)
- wl - +k
..
6
6
.
p(t − τ̃l ,0 )
ys (n)
-
- Xk- (·)dt ys,L (n)
- wL
6
p(t − τ̃L ,0 )
RAKE Receiver
Correlation-based receiver
This can be understood by observing that when N ≤
Nf /2, s(n) is the primary contributor to y s (n), while
s(n − 1) dominates when N ≥ Nf /2. Since decisions
are always made on the stronger symbol component, the
BER sensitivity to N is symmetric around N f /2. With
the signal energy reduction of (1 − 2N /Nf )2 in (11),
the sensitivity to acquisition is reminiscent of the timing
mismatch effect of a narrowband AWGN system with a
rectangular pulse shaper of duration N f Tf [15].
These analytic expressions for UWB transmissions over
The conditional noisy output y(n) is Gaussian with mean
AWGN channels are illustrated in Figure 3. The following
one of (9)-(10), and variance N o /2. Since s(n) is i.i.d. with
parameters are used: E s /No = 8dB, Nf = 10, Tf = 10ns,
equal probabilities, the average BER is given by
and Tp = 1ns. Note that the energy per pulse is constrained
Pe (N , |α0 ) = P r(y(n) < 0|s(n) = 1)
to be very low in UWB settings, but the effective SNR per
1
1
(11) symbol Es /No is typically set at a moderate level via choosing
= P r(y(n) < 0|(1, 1)) + P r(y(n) < 0|(1, −1))
2
2
a large Nf , in order to provide reliable symbol detection.
2
1
2α20 Es 2 1 2α20 Es 2
2N The BER is plotted versus the timing error τ normalized
= Q
, by the frame duration T f , for the commonly used Gaussian
Rp () + Q
Rp () 1−
2
No
2
No
Nf
monocycle 2 p(t) = (1 − 4πt2 /ν 2 ) exp(−2πt2 /ν 2 ) [2], where
√
x −u2 /2
ν = 0.43ns to yield Tp = 1ns. The BER degradation features a
where Q(x) := (1/ 2π) −∞ e
du is the complementary gradual contour due to the frame-level acquisition error, while
error function. In a special case,
perfect timing the actual performance exhibits sharp edges (one every T f
the BER under
2
2α0 Es /No , as expected.
is given by Pe (0, 0|α0 ) = Q
seconds) since the tracking error is strictly limited to the ultraThe following can be deduced from (11):
short pulse duration.
• A mismatch in decides the portion of pulse energy collected by the correlator. When the tracking error ≥ T p , it B. TH PAM Transmissions over AWGN Channels
results in Rp () = 0 and Pe = 1/2. Hence, tracking is very
In the presence of TH, y s (n) has the same form as in (6),
critical in AWGN and flat fading channels. Sensitivity to
but
the argument Λ p becomes Λp = (k−n)Nf Tf +(i−j)Tf +
the tracking error depends not only on the pulse duration
2
(c(i)−
c(j))Tc + N Tf + , where c(i) ∈ [0, Nc − 1]. As with
Tp , but also on the pulse shape via R p ().
(7)
–
(8),
we analyze the constraints on the non-trivial triplets
• A mismatch in N introduces ISI, and decides the por(k,
i,
j),
and
simplify y s (n) to [Appendix I-A]
tions of the received sample energy that are contributed
Nf −1
from s(n) and s(n − 1) via the ratio N /Nf . The worstRp (Λp (j, q))/Nf
ys (n) = w0 α0 Es s(n) 1q=0 j=N
+q
case acquisition error occurs when N = Nf /2 (·
1 N+q−1
+ w0 α0 Es s(n−1) q=0 j=0 Rp (Λp (j, q))/Nf , (13)
denotes integer floor), which leads to
Nf
Pe (
, |α0 )
(12)
2 Widely used in conventional impulse radios, the monocycle does not
2 comply with the spectral mask recently released by FCC. Nevertheless, we
2α20 Es 2
1
1
choose it in our numerical simulations for its wide recognition so far. This
Q
Nf is even,
No Rp () + 4 ,
choice does not compromise the usefulness of our simulations, because the
2 2
2
BER performance of a UWB radio is largely determined by the temporal
=
2α
E
2α
E
1
0 s
0 s
2 () + 1 Q
2 ()/N 2 ,
properties of the pulse through the autocorrelation function Rp (·). At a very
Q
R
R
p
p
f
2
No
2
No
low duty cycle, the pulse bandwidth (and thus the pulse duration) affects the
BER sensitivity to mis-timing more than the actual spectral shape.
Nf is odd.
Note that a coherent symbol detector must compensate for
the channel phase shift, which means that the weight factor
w0 should be set to be proportional to sgn{α 0 } before passing
y(n) through a thresholder. There are four pairs of possible
values for (s(n), s(n − 1)), resulting in
ys (n)|(+1,+1) = −ys (n)|(−1,−1) = |α0 | Es Rp () (9)
ys (n)|(+1,−1) = −ys (n)|(−1,+1)
= |α0 | Es Rp ()(1−2N/Nf ).
(10)
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
5
0
10
−1
BER
10
−2
10
No mis−timing
Gaussian pulse
Acquisition error only
−3
10
−4
10
Fig. 3.
0
2
4
τ/Tf
6
8
10
BER performance for a direct-path AWGN channel, no TH.
When ∈ R1 , the last two terms survive, and ISI shows
up. When ∈ (−Tp , Tp ), only the first term remains, and no
ISI emerges. This implies that, even with perfect acquisition,
ambiguity on symbol transmission (or ISI) may be present due
to TH, because tracking errors beyond the interval (−T p , Tp )
may result in non-zero R p (Λp ).
Assume now that these (2N c − 1) bins are mutually exclusive3 . The value of picks out a unique pair (m o , qo ), if any,
such that ∈ (−Tp − mo Tc + qo Tf , Tp − mo Tc + qo Tf ). The
decision statistic is then decided by how many out of the N f
code differences in (13) are equal to m o . To answer this, let us
introduce the notation I j,q (m) := δ(m−(c(j−N −q)−c(j))),
where δ(·) is Kronecker’s Delta. Eq. (13) can then be rewritten as
ys (n) = w0 α0
Nf −1
Rp (mo Tc +−qoTf )
Es s(n)
Ij,qo (mo )
Nf
j=N+qo
where Λp (j, q) := (c(j−N−q)−c(j))Tc+−qTf . The decision
statistic ys (n) depends on the TH code through Λ p . We will
see next, that TH expands the allowable tracking mismatch ,
and aggravates the BER degradation to acquisition mismatch.
TH sequences are pseudo-random (deterministic and periodic), or, random. Since N f is typically large (in the order of a
hundred), the TH codes in both cases can be well modeled as
being independent and uniformly distributed over [0, N c − 1].
Correspondingly, the distribution of the code difference, which
controls Λp (j, q), is
1
|m|
Pr {(c(j −N −q) − c(j))Tc = mTc } =
1−
, (14)
Nc
Nc
N + q = 0,
where m ∈ [−(Nc − 1), (Nc − 1)]. Any of these 2N c − 1
values of m may appear in the summands of (13), resulting
in Λp = mTc + − qTf . If there exists a pair (m, q) such
that Λp ∈ (−Tp , Tp ), some summands in (13) will be nonzero with certain probability, given that the tracking error is
confined to = Λ p − mTc + qTf ∈ (−Tp − mTc + qTf , Tp −
mTc + qTf ). To satisfy Λp ∈ (−Tp , Tp ), we observe that the
non-trivial values for m differ depending on q. When q =
0, Λp = mTc + > mTc − Tp is greater than T c − Tp >
Tp , for m ≥ 1. Hence, the constraint Λ p < Tp implies that
m ≤ 0, which results in (Nc + 1) non-overlapping bins for
the allowable values of : R 0 := ∪{(−mTc − Tp , −mTc +
Tp )}0m=−(Nc −1) . Similarly, when q = 1, Λ p = mTc +−Tf <
mTc − Tp , which implies m ≥ 1, the allowable range for contains Nc non-overlapping bins R 1 := ∪{(Tf − mTc −
c −1
Tp , Tf − mTc + Tp )}N
m=1 . With the use of TH, the allowable
range for the tracking error to yield non-zero R p (·) values
in (13), and thus to ensure energy capture, is expanded to a
total of (2Nc − 1) bins, each of duration 2T p .
A special case arises when N = 0. Setting N = 0 in (13),
the signal component y s (n) is reduced to
Nf −1
1
ys (n) = w0 α0 Es s(n)
Rp (Λp (j, 1))
Nf j=1
1
+ s(n)Rp () + s(n − 1)
Rp (Λp (0, 1)) . (15)
Nf
+ w0 α0
N
+qo−1
Es s(n−1)
Ij,qo (mo )
j=0
Rp (mo Tc +−qoTf )
. (16)
Nf
Let ρ0 (k0 ) denote the probability that the event I j,qo (mo ) = 1
occurs k0 times in the Nf −N −qo summands associated with
!
, it follows from (14) that,
s(n) in (16). With CkN := k!(NN−k)!
for k0 ∈ [0, Nf − N − qo ],
Nf−N−qo Nc−|mo | k
o | Nf−N−qo−k0
( N 2 ) 0 (1− Nc−|m
)
,
Ck0
Nc2
c
ρ0 (k0 ) =
+q
=
0
N
o
δ(k0 −(Nf −N −qo ))δ(mo ),
N +qo = 0.
(17)
Similarly, let ρ1 (k1 ) denote the probability that the event
Ij,qo (mo ) = 1 occurs k1 times in the N + qo summands associated with s(n − 1) in (16). We have ρ 1 (k1 ) =
o | k1
o | N +qo −k1
CkN1 +qo ( Nc −|m
) (1 − Nc −|m
)
for k1 ∈ [0, N +
Nc2
Nc2
qo ] when N + qo = 0, and ρ1 (k1 ) = δ(k1 )δ(mo ), for
N + qo = 0. In all, ys (n) takes on the following value with
probability ρ 0 (k0 ) · ρ1 (k1 ):
k0
k1
ys (n) = w0α0 Es Rp (mo Tc +−qoTf ) s(n) +s(n−1)
,
Nf
Nf
(18)
for k0 ∈ [0, Nf −N −qo ], k1 ∈ [0, N +qo ].
The procedure for analyzing the BER is as follows: If ∈
/
(R0 ∪ R1 ), it falls outside these (2Nc − 1) bins, which results
in y(n) = v(n) and Pe = 0.5. When ∈ (R0 ∪ R1 ), a unique
pair (mo , qo ) can be identified, and (18) applies. To evaluate
P r(y(n) < 0|s(n) = 1) in a coherent detector (i.e., w 0 =
sgn{α0 }), we note that y s (n) conditioned on (s(n), s(n − 1))
is given by
k0 ± k1
. (19)
ys (n)|(1, ±1) = |α0 | Es Rp (mo Tc +−qoTf )
Nf
Depending on s(n − 1), k 0 , and k1 , ys (n) conditioned on
s(n) = 1 may take (Nf +N +qo ) possible values. Conditioned
on (k0 , k1 ), the BER is given by
3 The sub-regions in R and R are non-overlapping when setting T ≥
c
0
1
2Tp . Deriving the BER is more complicated when Tp < Tc ≤ 2Tp , but the
same approach of analysis applies.
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
6
2
k0 +k1
1 2α20 Es 2
Pe (k0 , k1 |α0 )= Q
Rp (mo Tc +−qoTf )
2
No
Nf
1 2α20 Es 2
k0 −k1
+ Q
Rp (mo Tc +−qoTf )
. (20)
2
No
Nf
0
10
−1
BER
10
Hence, the BER averaged over all possible (k 0 , k1 ) pairs is
given by
Nf −N −qo N +qo
Pe (N , |α0 ) =
ρ0 (k0 )ρ1 (k1 )Pe (k0 , k1 |α0 ).
k0 =0
−2
10
−3
10
No mis−timing
N =2
c
N =5
c
k1 =0
Acquisition error only, no TH
(21)
Again, the result applies to N ≤ Nf /2, and the BER
10
0
2
4
6
8
10
is symmetric in N around N f /2. The BER performance
τ/Tf
without timing mismatch
remains
unchanged in the TH case:
Fig. 4. BER for a direct-path AWGN channel, with TH.
2
2α0 Es /No .
Pe (0, 0|α0 ) = Q
The following observations are made on the TH case with
L 1
a sliding correlator:
ys (n) = Es w0
αl Rp ( + τl,0 − qTf )
• Acquisition becomes very critical. When N = 0,
l=0 q=0
the reduction
N + q
N + q
Nf −1in receive signal energy is decided by
·
s(n)(1
−
)
+
s(n
−
1)
. (23)
(1/Nf ) j=N +qo Ij,qo (mo ), which is ascertained by the
Nf
Nf
chance that the pulses in mis-aligned frames happen to
be picked out by hopping codes of different frames. The To yield non-zero R p in (23), we observe that q = 0 when
large-error terms in (21) correspond to small values for ∈ [−Tp , Tp ), and q = 1 otherwise, regardless of N . This
k0 and k1 , which unfortunately force large probabilities implies that, even with perfect acquisition, ISI may be present
due to multipath, when tracking errors are beyond the interval
ρ0 (k0 )ρ1 (k1 ), thus dominating the average BER.
[−Tp , Tp ). Similar symbol ambiguity (that is, unexpected ISI)
• Mis-tracking tolerance is seemingly enhanced due to
induced
by signal spreading has been observed due to TH.
TH. The allowable range for is now increased from
Conditioned
on (s(n) = 1, s(n−1) = ±1), y(n) is given by
(−Tp , Tp ) to (2Nc − 1) bins of 2Tp seconds each. On
L 1
the other hand, due to the more stringent requirement on
E
w
αl Rp (+τl,0 −qTf ) + v(n), (24)
y(n)|(1,
1)
=
s
0
acquisition, the enhanced tracking range does not bring
l=0 q=0
real improvement in BER robustness. When N = 0, the
L 1
2N +2q
tracking error is still limited to (−T p , Tp ) to avoid ISI
y(n)|(1,−1) = Es w0
αl Rp (+τl,0 −qTf )(1−
)
[c.f. 15)]. When N = 0, there is only a small chance
Nf
l=0 q=0
of energy capture when the correlator coincides with the
+ v(n).
(25)
transmitted pulses after random hopping.
Overall, although TH alleviates the need for tracking, the BER Sufficient energy capture is critical to detecting signals
performance is considerably compromised in the presence of scattered by dense multipath channels. Let E α (N , |{αl }L
l=0 )
acquisition errors. The effect of TH on a direct-path channel denote the portion of path energy that is collected by a
is confirmed in Figure 4, which adopts the same system receiver under both acquisition and tracking errors, and
parameters as in the absence of TH. TH codes of different Eα (|{αl }L
l=0 ) as the received path energy subject to tracking
lengths (Nc = 2, 5) are evaluated, where a larger N c may error only. For a coherent correlator, E α (|{αl }L
l=0 ) and
accommodate more users. With an increase in N c , there is Eα (N , |{αl }L
)
can
be
deduced
from
(24)
and
(25),
l=0
a larger number of weaker spikes in the BER curves, which respectively, noting that transmission of identical consecutive
illustrates that the BER degradation due to acquisition errors symbols in (24) reduces the impact of acquisition errors.
is aggravated.
Setting w0 to compensate for the phase shift of the aggregate
channel described
summation over l, we
in the
2 have
1
L
L
C. PAM Transmissions over Dense Multipath Channels
and
Eα (|{αl }l=0 ) =
l=0
q=0 αl Rp ( + τl,0 − qTf )
2
In a dense-multipath channel, we have L 1. We start
L
1
N+q
)
=
α
R
(+τ
−qT
)(1−2
)
.
Eα(N, |{αl }L
l
p
l,0
f
l=0
l=0
q=0
Nf
with a symbol-rate sliding correlator by taking L = 0 in (5).
Accordingly,
the
BER
is
given
by
The resulting y s (n) becomes:
Nf −1 Nf −1
∞
L
Pe (N , |{αl }L
l=0 ) = P r(y(n) < 0|s(n) = 1)
s(k)
w0
ys (n) = Es
1
1
i=0 j=0
k=0
l=0
(26)
= P r(y(n) < 0|(1, 1)) + P r(y(n) < 0|(1, −1))
2
2
α R ((k−n)N T +(i−j)T +N T ++τ )/N . (22)
−4
l
p
f
f
f
f
l,0
f
Carrying over the analysis on the constraints of non-trivial
triplets (k, i, j), (22) can be simplified to [Appendix I-B]
=
L
1 2Es Eα(|{αl }L
l=0 ) 1 2Es Eα(N ,|{αl }l=0 )
Q
+ Q
.
2
No
2
No
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
7
Note that the channel taps picked by the summations in
L
Eα (|{αl }L
l=0 ) and Eα (N , |{αl }l=0 ) are determined by . In
a dense-multipath environment where the tap delay spacing is
small, i.e., τl+1 − τl ≤ 2Tp for any l, at least one of the l’s
will result in + τl,0 − qTf ∈ (−Tp , Tp ) for some q ∈ [0, 1].
Therefore, the correlator always collects signal energy for any
∈ [−Tp , Tf − Tp ). On the other hand, when τ l+1 − τl ≥ Tp ,
which is a reasonable constraint since T p is the minimum path
resolution time, there are only up to 2 possible values of l
that will contribute non-zero
Lsummands, for any . Compared
with the total path energy l=0 α2l , the energy collected by a
sliding correlator is substantially reduced, which necessitates
exploitation of diversity using RAKE combiners.
Let us consider a RAKE receiver constructed with perfect
channel knowledge. When TH is not employed, the output of
a RAKE can be obtained from (5) by taking out the TH terms:
Nf −1 Nf −1 L L
∞
ys (n) = Es
s(k)
wl αl /Nf
i=0
k=0
j=0 l=0 l =0
·Rp ((k−n)Nf Tf +(i−j)Tf +N Tf ++τl,0 − τ̃l ,0 ). (27)
Similar to (23), y s (n) can be simplified to [Appendix I-B]
L 1
L wl αl Rp ( + τl,0 − τ̃l ,0 − qTf )
ys (n) = Es
l=0 l =0 q=0
N + q
N + q
.
· s(n)(1 −
) + s(n − 1)
Nf
Nf
(28)
By inspecting ys (n) conditioned on (s(n), s(n−1)), we obtain
the energy capture indices for a RAKE receiver:
2
L
L
1
wl
αl
Rp (+τl,0 − τ̃l ,0 −qTf ) ,
Eα (|{αl }L
l=0 ) =
l =0
l=0
q=0
(29)
L
L
1
wl αl Rp (+τl,0 − τ̃l ,0 −qTf )
Eα (N , |{αl }L
l=0)=
l=0
l=0
q=0
2
2(N +q)
· 1−
.
Nf
(30)
Substituting (29) and (30) into (26), we can readily obtain the
BER for the RAKE receiver.
Time hopping affects the robustness of RAKE reception to
mis-timing. Different from the AWGN case, we do not assume
any probabilistic model for the TH codes here, but carry out
our analysis conditioned on the TH codes. In the AWGN case,
it is imperative to study the allowable range of the tracking
error; therefore, a statistical viewpoint is instrumental. In the
dense multipath case, on the other hand, a receiver will always
match to some path(s) of the signal component regardless of
any tracking error, but the energy capture may not be sufficient
under mis-timing. TH codes merely change the path positions
and the associated RAKE weights, but not the number of paths
collected by the receiver. Hence, a statistical model for the TH
codes is not well motivated. With this in mind, we carry over
the analysis on non-trivial triplets in (5) for the TH case, and
reach a simplified version of the decision statistic as follows
[Appendix I-C]:
Nf−1
L L 2
1
wl αl Rp (Λp (j, l, l, q))
ys (n)= Es s(n)
N
f
l=0 l =0q=−1
j=N+q
N
L L 2
+q−1
1
+ Es s(n−1)
wl αl Rp (Λp (j, l, l, q)), (31)
N
f
q=−1
j=0
l=0 l =0
where Λp (j, l, l , q) := (c(j−N−q)−c(j))Tc ++τl,0 − τ̃l ,0 −
qTf . For given j and q, there is only one code difference m out
of (2Nc − 1) possible values per realization. Compared with
the no TH case in (28), it is now the tracking error mT c + that determines the RAKE fingers l to be matched to each
path l. The BER can be derived as
Nf −1
Pe N , |{αl }L
,
{c(j)}
l=0
j=0
2
−1
N
2
L L
f
1 2Es 1 = Q
wl αl Rp (Λp (j, l, l , q))
2
No
N
q=−1 f j=0
l=0 l =0
L L
2
1 2Es 1
+ Q
wl αl
2
No
Nf
q=−1
l=0 l =0
Nf−1
N
+q−1
·
Rp (Λp (j, l, l , q))−
Rp (Λp (j, l, l , q)). (32)
j=N+q
j=0
In contrast to a direct-path channel, dense multipath propagation implies different timing tolerances:
• For a sliding correlator, a dense-multipath channel imposes less stringent requirements on tracking, allowing
∈ [−Tp , Tf − Tp ). On the other hand, due to the
energy spreading over multiple paths, the weak energycapture capability discourages its use in power-limited
UWB transmissions.
• For RAKE reception under fixed channel realizations,
signal detection is robust to tracking errors. When τ̃ l ,0 =
τl ,0 , ∀l , it follows from (28) that, for any ∈ [−T p , Tf −
Tp ), every path l ∈ [0, L] will be picked at most by
2 RAKE fingers l , such that + τl,0 − τ̃l ,0 − qTf ∈
(−Tp , Tp ).
• When TH is employed, the energy capture is similar to
the no-TH case, except that the TH codes alter the taps
picked out. Such a shuffling of taps is equivalent to noise
averaging and thus induces diversity even when only a
simple correlator is used.
This assessment is verified via analytical evaluation depicted in
Figure 5. In the dense-multipath channel used, the path delays
are taken to be τ l = τ0 + lTp , 0 ≤ l ≤ (Tf − 2Tp )/Tp ,
and the path gains are assumed to fall off exponentially
according to the profile: E{α 2l } = E0 e−λl , where E0 is a
scaling factor to normalize the total multipath power spread
L
to unity (i.e., l=0 E{α2l } = 1), and λ = 2/3 is the decay
factor [5].
For the time being, we assume no fading, i.e.,
|αl | = E{α2l } with its sign randomly chosen between ±1
with equal probabilities. We depict the BER performance of
a sliding correlator (RAKE-1: L = 0), and an equal gain
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
8
0
10
present a unifying approach for BER performance analysis
under mis-timing for random fading channels, along with
corroborating simulations and summarizing remarks.
−1
BER
10
A PPENDIX I
S IMPLIFIED DETECTION STATISTICS
−2
10
In this appendix, we detail the steps used to simplify the
decision statistic ys (n) for various operating conditions, under
the constraints on non-trivial triplets (k, i, j).
RAKE−1
RAKE−EGC
No mis−timing
Acquisition error only, no TH
−3
10
A. TH PAM Transmissions over AWGN Channels
−4
10
0
2
4
τ/Tf
6
8
10
(a)
0
10
For TH PAM transmissions over AWGN channels, y s (n) is
given by
Nf −1 Nf −1
∞
s(k)
ys (n) = α0 Es
i=0
k=0
j=0
Rp ((k−n)Nf Tf +(i−j)Tf +N Tf +(c(i)−c(j))Tc +)/Nf .
(33)
−1
BER
10
Similar to (7), the triplet (k, i, j) contributes a non-zero R p (·)
in (33) only when there exists an integer q such that
−2
10
(k − n)Nf + N + (i − j) + q = 0;
(c(i) − c(j))Tc + − qTf ∈ (−Tp , Tp ).
RAKE−1
RAKE−EGC
No mis−timing
Acquisition error only, no TH
−3
10
−4
10
0
2
4
τ/Tf
6
8
10
(b)
Fig. 5. BER performance for a multipath AWGN channel: (a) no TH; (b)
with TH (Nc = 3).
combiner (RAKE-EGC: τ̃ l = τl , L = L) to illustrate the
drastically different sensitivity in dense multipath compared
with a direct path. In the absence of TH, the RAKE-1 receiver
only picks out a very small number of paths, where the time
locations of the contributing paths are determined by . As
a result, the BER performance of RAKE-1 exhibits a similar
pattern as the channel power delay profile. It may perform
well when it happens to catch strong paths at certain , but
generally is ineffective in energy capture. The RAKE-EGC
receiver, on the other hand, averages out the received energy
from all paths within a frame using equal weights; thus the
BER performance is relatively insensitive to the tracking error.
When TH is present, RAKE-1 does not work well, because
it can no longer catch strong paths in all frames, regardless
of . Meanwhile, the performance advantage of RAKE-EGC
over RAKE-1 is more pronounced only when N = 0, but
less obvious when there exists any acquisition error. The more
interesting maximum ratio combining (MRC) receiver will be
discussed for fading channels in Part II of this sequel [6].
So far, we have established a unifying signal model for
analyzing the detection performance of a correlation-based
receiver under mis-timing. Timing tolerances in different propagating environments have been discussed based on fixed
channel realizations. In Part II of this sequel [6], we will
(34)
(35)
Note that (c(i) − c(j))Tc ∈ [−Tf + Tc , Tf − Tc ), and ∈
[−Tp , Tf − Tp ), which dictates (c(i) − c(j))Tc + ∈ [−Tf +
Tc − Tp , 2Tf − Tc − Tp ). Hence, it can be seen from (35)
that the allowable values for q are: 0, 1. Meanwhile, since
N + (i − j) + q ∈ [−(Nf − 1), 2Nf − 1)], the allowable values
for k − n in (34) are confined to (k − n)N f ∈ [−(2Nf −
1), (Nf − 1)], which leads to k − n ∈ {0, −1}. Moreover,
i = j − N − q − (k − n)Nf is confined to [0, Nf − 1].
Therefore, if j ∈ [0, N + q − 1], then i = j − N − q and
k = n. Furthermore, when j ∈ [N + q, Nf − 1], we have that
i = j − N − q − Nf , and k = n − 1. In summary,
ys (n) =
(36)
1 N
+q−1
α0 Ess(n−1)
q=0 j=0
Rp ((c(j −N −q+Nf)−c(j))Tc +−qTf)
Nf
f−1
1 N
Rp ((c(j −q−N)−c(j))Tc +−qTf )
+ α0 Es s(n)
.
Nf
q=0
j=N+q
Because the TH code is symbol periodic, we have c(j − N −
q + Nf ) = c(j − N − q).
B. TH-free PAM over Dense Multipath Channels
For dense multipath without the use of TH, the decision
statistic is
Nf −1 Nf −1 L
∞
ys (n) = Es
s(k)
αl
k=0
i=0
j=0 l=0
·Rp ((k−n)Nf Tf +(i−j)Tf +NTf ++τl,0 )/Nf .
(37)
Due to the narrow non-zero support of R p (τ ), we have
(k − n)Nf Tf + (i − j)Tf + N Tf + qTf = 0;
(38)
(39)
+ τl,0 − qTf ∈ (−Tp , Tp ).
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
9
Since τl,0 ∈ [0, Tf − 2Tp ], we have
+τl,0 −qTf ∈ [−qTf , (2−q)Tf −Tp ) ⇒ q = 0, 1;
(k−n)Nf = −(i−j)−N −q ∈ [−(2Nf −1), Nf −1]
(40)
⇒ (k − n) ∈ {0, −1};
(41)
i = j − N − q − (k − n)Nf ∈ [0, Nf − 1]
when j ∈ [0,N +q−1], k = n−1, i = j −N−q+Nf
⇒
(42)
when j ∈ [N+q, Nf −1], k = n, i = j −N −q
Dissection on (40) reveals that q = 0 when ∈ [−T p , Tp ),
and q = 1 otherwise. For a given , at most one q value
contributes to non-zero correlation R p ( + τl − qTf ) for any
τl,0 ∈ [0, Tf − 2Tp ).
Using (40)-(41), (37) is simplified to
1
ys (n) = Es
(s(n)(Nf −N −q)+s(n−1)(N +q))
q=0
·
L
αl Rp (+τl,0 −qTf )/Nf .
(43)
l=0
When RAKE reception is involved, the output of a RAKE
combiner is given by (5) after taking out the TH terms
Nf −1 Nf −1 L L
∞
s(k)
wl αl /Nf
ys (n) = Es
k=0
i=0
j=0 l=0 l =0
·Rp ((k−n)Nf Tf +(i−j)Tf +N Tf ++τl,0 − τ̃l ,0 ). (44)
Following the previous analysis, condition (38) still holds,
while condition (39) is changed to + τ l,0 − τ̃l ,0 − qTf ∈
(−Tp , Tp ). Taking into account that τ l,0 − τ̃l ,0 ∈ [−Tf +
2Tp , Tf − 2Tp ], we have the following conditions for reaching
non-zero summands in (44):
+τl,0 −τ̃l ,0 −qTf ∈ [−(1+q)Tf +Tp , (2−q)Tf −Tp ) ⇒ q = 0,1;
(45)
Since the possible values for q are the same as in (40), and (38)
remains the same, the conditions on (k, i, j) are still described
by (41) and (42).
C. TH PAM over Dense multipath channels
In a dense multipath channel with TH, the output of a RAKE
receiver is given by (5)
Nf −1 Nf −1 L L
∞
s(k)
wl αl /Nf
ys (n) = Es
k=0
i=0
j=0 l=0 l =0
·Rp((k−n)NfTf +(i−j)Tf +(c(i)−c(j))Tc+NTf++τl,0 − τ̃l,0 ).
(46)
Following the previous analysis, condition (38) still holds,
while condition (39) is changed to (c(i) − c(j))T c + + τl,0 −
τ̃l ,0 − qTf ∈ (−Tp , Tp ).
Since (c(i)−c(j))Tc ∈ [−Tf +Tc , Tf −Tc], and τl,0 −τ̃l ,0 ∈
[−Tf + 2Tp , Tf − 2Tp ], we have the following conditions for
the summands in (46) to be non-zero:
+(c(i)−c(j))Tc +τl,0 − τ̃l ,0 −qTf
∈ [−(2+q)Tf+Tc+Tp , (3−q)Tf−Tc −3Tp ) ⇒ q ∈ [−1,2]; (47)
(k−n)Nf = −(i−j)−N−q ∈ [−2Nf,Nf] ⇒ k−n ∈ [−2,1]; (48)
i = j − N − q − (k − n)Nf ∈ [0, Nf − 1]
when j ∈ [N+q, Nf−1], k = n, i = j −N −q;
⇒
(49)
when j ∈ [0, N +q−1], k = n−1, i = j −N−q+Nf .
It is seen from (49) that when k − n = 1, −2, the constraints
i, j ∈ [0, Nf − 1] are violated. Therefore, the allowable range
of k − n is still confined to be k − n = 0, −1. In summary,
we have
2
ys (n) = Es s(n)
Nf −1
L L
wl αl /Nf
q=−1 j=N +q l=0 l =0
·Rp ((c(j −N −q)−c(j))Tc ++τl,0 − τ̃l ,0 −qTf )
+q−1
L
2 N
L + Es s(n−1)
wl αl /Nf
q=−1 j=0
l=0 l =0
·Rp ((c(j −N −q)−c(j))Tc ++τl,0 − τ̃l ,0 −qTf ). (50)
It can be observed from (47), that when (c(i) − c(j))T c ≥
0, q = −1 does not contribute to y(n). Conversely, when
(c(i) − c(j))Tc ≤ 0, q = 2 does not contribute to y(n).
R EFERENCES
[1] F. Ramirez-Mireles, “On the performance of ultra-wide-band signals
in Gaussian noise and dense multipath,” IEEE Trans. on Vehicular
Technology, vol. 50, no. 1, pp. 244-249, Jan. 2001.
[2] M. Z. Win, R. A. Scholtz, “Ultra Wide bandwidth time-hopping spreadspectrum impulse radio for wireless multiple access communications,”
IEEE Trans. on Communications, vol. 48, pp. 679-691, 2000.
[3] J. Foerster, E. Green, S. Somayazulu, and J. Leeper, “UltraWideband Technology for Short or Medium Range Wireless
Communications,”
Intel Corp. Tech. Journal, Q2, 2001
http://developer.intel.com/technology/itj
[4] W. M. Lovelace, J. K. Townsend, “The effects of timing jitter and
tracking on the performance of impulse radio,” IEEE Journal on Selected
Areas in Communications, vol. 20, no. 12, pp. 1646-1651, Dec. 2002.
[5] J. Foerster, “The effects of multipath interference on the performance
of UWB systems in an indoor wireless channel,” Proc. of the Veh. Tech.
Conf. ’01, pp. 1176-1180, 2001.
[6] Z. Tian, G. B. Giannakis, “BER Sensitivity to Mis-Timing in UltraWideband Impulse Radios – Part II: Performance in Fading Channels,”
IEEE Trans. on Signal Processing, 2004 (to appear).
[7] “IEEE
802.15
WPAN
High
Rate
Alternative
PHY
Task
Group
3a
(TG3a),”
Internet
on-line
access
at
http://www.ieee802.org/15/pub/TG3a.html.
[8] C. J. Le Martret and G. B. Giannakis, “All-Digital Impulse Radio for
Wireless Cellular Systems,” IEEE Transactions on Communications, vol.
50, no. 9, pp. 1440-1450, September 2002.
[9] A. R. Forouzan, M. Nasiri-Kenari, and J. A. Salehi, “Performance
analysis of ultra-wideband time-hopping spread spectrum multipleaccess systems: uncoded and coded schemes,” IEEE Trans. on Wireless
Communications, vol. 1, no. 4, pp. 671-681, Oct. 2002.
[10] R. Fleming, C. Kushner, G. Roberts, U. Nandiwada, “Rapid acquisition
for ultra-wideband localizers,” Proc. of IEEE Conf. on UWB Systems &
Technologies, Baltimore, MD, pp. 245-250, May 2002.
[11] H. Lee, B. Han, Y. Shin, and S. Im, “Multipath characteristics of impulse
radio channels,” Proc. IEEE Vehicular Technology Conference, pp. 24872491, Tokyo, Spring 2000.
[12] A. A. M. Saleh, and R. A. Valenzuela, “A statistical model for indoor
multipath propagation,” IEEE Journal on Selected Areas in Communications, vol. JSAC-5, no. 2, pp. 128-137, Feb. 1987.
[13] D. Cassioli, M. Z. Win, A. F. Molisch, “The UWB indoor channel:
from statistical model to simulations,” IEEE Journal on Selected Areas
in Communications, vol. 20, pp. 1247-1257, Aug. 2002.
[14] M. Z. Win, and R. A. Scholtz, “Characterization of UWB wireless indoor
channels: a communication-theoretic view,” IEEE Journal on Selected
Areas in Communications, vol. 20, pp. 1613-1627, Dec. 2002.
[15] J. G. Proakis, and M. Salehi, Communication Systems Engineering (2nd
Ed.), Section 7.8: Symbol Synchronization, Prentice Hall, New Jersey,
2002.
IEEE TRANSACTIONS ON SIGNAL PROCESSING (TO APPEAR)
Zhi Tian (M’98) received the B.E. degree in Electrical Engineering (Automation) from the University
of Science and Technology of China, Hefei, China,
in 1994, the M. S. and Ph.D. degrees from George
PLACE
Mason University, Fairfax, VA, in 1998 and 2000.
PHOTO
From 1995 to 2000, she was a graduate research
HERE
assistant in the Center of Excellence in Command,
Control, Communications and Intelligence (C3 I) of
George Mason University. Since August 2000, she
has been an Assistant Professor with the department
of Electrical and Computer Engineering, Michigan
Technological University. Her current research focuses on signal processing
for wireless communications, particularly on ultra-wideband systems. Dr.
Tian serves as an Associate Editor for IEEE Transactions on Wireless
Communications. She is the recipient of a 2003 NSF CAREER award.
Georgios B. Giannakis (F’97) received his Diploma
in Electrical Engineering from the National Technical University of Athens, Greece, 1981. From
September 1982 to July 1986 he was with the
PLACE
University of Southern California (USC), where he
PHOTO
received his MSc. in Electrical Engineering, 1983,
HERE
MSc. in Mathematics, 1986, and Ph.D. in Electrical
Engineering, 1986. After lecturing for one year
at USC, he joined the University of Virginia in
1987, where he became a professor of Electrical
Engineering in 1997. Since 1999 he has been a
professor with the Department of Electrical and Computer Engineering at
the University of Minnesota, where he now holds an ADC Chair in Wireless
Telecommunications.
His general interests span the areas of communications and signal processing, estimation and detection theory, time-series analysis, and system
identification – subjects on which he has published more than 200 journal
papers, 350 conference papers, and two edited books. Current research
focuses on transmitter and receiver diversity techniques for single- and multiuser fading communication channels, complex-field and space-time coding,
multicarrier, ultra-wide band wireless communication systems, cross-layer
designs and distributed sensor networks.
G. B. Giannakis is the (co-) recipient of six paper awards from the IEEE
Signal Processing (SP) and Communications Societies (1992, 1998, 2000,
2001, 2003, 2004). He also received the SP Society’s Technical Achievement
Award in 2000. He served as Editor in Chief for the IEEE SP Letters, as
Associate Editor for the IEEE Trans. on Signal Proc. and the IEEE SP Letters,
as secretary of the SP Conference Board, as member of the SP Publications
Board, as member and vice-chair of the Statistical Signal and Array Processing
Technical Committee, as chair of the SP for Communications Technical
Committee and as a member of the IEEE Fellows Election Committee. He has
also served as a member of the IEEE-SP Society’s Board of Governors, the
Editorial Board for the Proceedings of the IEEE and the steering committee
of the IEEE Trans. on Wireless Communications.
10