Engineering Mechanics – Statics B. M. Mohammed Moment of Inertia:
advertisement

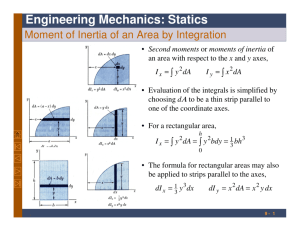
Engineering Mechanics – Statics B. M. Mohammed Moment of Inertia: Second moment , or moment of inertia , of an area: Moment of inertia applied to areas has no physical meaning when examined by its self, it is a mathematical expression of a form ∫(distance)2dA .when used in combined with other terms such as flexure formula ( σ = My ), it begins to have a I significance . For a beam subjected to a bending moment, the internal forces in any section of the beam are distributed forces vary linearly with the distance “y” from an axis passing through the centroid of the section. Ten. ∆F=k y ∆A y Comp. Resultant : R=∫ k y dA = k ∫ y dA & =∫ y dA = A = zero as the centroid of the section located on the x-axis ⇒ system of ∆F → Couple (as ten.& comp.) & for equilibrium : & B.M= Σ y∆F ∆M= y∆F= k y2 ∆A M=k ∫ y2 ∆A = k ∫ y2 dA ∫ y2 dA= 2nd moment or moment of inertia with respect to the x-axis. N.A. Engineering Mechanics – Statics B. M. Mohammed Polar Moment of Inertia: The moment of inertia for an area relative to a line or axis ⊥ the plane of the area is called the Polar Moment of Inertia. Jo 2 ∫ (x + y = ∫ x dA + ∫ y dA Jo = ∫ r dA = 2 2 2 ) dA 2 Jo = Ix + Iy Radius of Gyration of an Area: Ix=∫ y2 dA If this area is squeezed into a strip with the same moment of inertia w.r.t. the x-axis, the strip should be placed at a distance kx from the x-axis. i.e. I x = k x2 A or k x = Ix A kx: radius of gyration w.r.t. the x-axis. I y = k y2 A ; ky = Iy J o = k o2 A ; ko = Jo A k o2 = k x2 + k y2 A Engineering Mechanics – Statics B. M. Mohammed Determination of Moment of Inertia by Integration: Ix=∫ y2 dA rectangular moment of inertia about x & y - axis 2 Iy=∫ x dA Ex: Find Ix & Iy for the rectangular area shown y y b dA = hdx dA = bdy dI y = hx 2 dx dI x = by 2 dy dx b Iy = ∫ h Ix = 2 x hdx b h 2 ∫ by dx h dy 0 0 3 b h Iy = 3 x x y bh 3 Ix = 3 x Computing Ix & Iy from the same elementary stripe: dA = ydx Iy = ∫x 2 dA = Put : y = h ⇒ ∫x 2 ydx y b b I y = h ∫ x 2 dx 0 3 b h 3 y 3 dx dI x = 3 b y3 Ix = ∫ dx 3 0 Iy = bh 3 .......... ( as : y = h ) Ix = 3 dx h x x Engineering Mechanics – Statics B. M. Mohammed 9.4 Determine by direct integration the moment of inertia of the shaded area with respect to the y-axis. at : x = a ; y = b k = y b a2 y = b − kx 2 = b − ∫x Iy = 2 a 2 y ydx b 2 x ) dx = a2 2 ∫ x (b − Iy = ∫x dA = b 2 x a2 0 a y= k x2 a ∫ ( bx 2 − 0 b 4 x ) dx a2 b x a I y = b( x3 x5 ba 3 ba 5 ba 3 ba 3 ) − = − = − 3 3 5 3 5a 2 5a 5 0 x dx 2 ( ba 3 ) 15 Iy = 9.8 Determine by direct integration the moment of inertia of the shaded area with respect to the x-axis. at : x = a ; y = b k = y a b a2 y = k y = kx 2 ⇒ x = x= a Ix = ∫ Ix = y 1 Ix = a2 y b y= k x2 b a y2 * x ∫ y 2 dA = y 2 xdy y b y b 7 a b y b ∫ dy 2 0 Ix = y = b a2 7 1 2 dy = b a b ∫y 0 b 2 2 2 ( ab 3 ) 7 = 0 2a 7b 1 (b ) 2 7 2 5 2 dx x Engineering Mechanics – Statics B. M. Mohammed 9.12 Determine the radius of gyration of the shaded area with respect to the y-axis. at : x = a ; y = b b k = 3 a b y = 3 x3 a y a a b Iy = 3 a Iy = A= A= ba 6 a ∫ 0 2 2 b x6 x dx = 3 a 6 y x a 5 x 0 3 ∫ dA = ∫ ydx = a ∫ 0 b 3 b x4 = x dx a3 a3 4 a = 0 ba 4 ky = Iy ky = 2 *a 3 A b y= k x3 b I y = ∫ x dA = ∫ x ydx = ∫ x ( 3 x 3 ) dx a 0 2 = ba 3 6 = ab 4 ba 3 4 * = 6 ab 2 2 a 3 ba 4 4a 3 dx