momentum equation vector equation of motion for a continuum
advertisement

momentum equation
vector equation of motion for a continuum
steady flow:
∂
dI~ Z
X
=0:
= A ρ~v (~v · ~n)dA = Fa = F~p + F~g (+F~R) + F~S
∂t
dt
Z
dF = p dA
~
pressure:
Fp = A −~npdA n
+p1A
p
p
x
2
1
n
n
n
y
x
−p2A
dA
n
x
Z
Z
~
Fg = τ ~g dm = τ ~g ρdτ (incompressible)
volume force:
acceleration is parallel to the coordinate direction
Z
~
FR = − A(~σ 0 · ~n)dA
friction force:
F~S : Force from the fitting onto the flow
Scalar product: ~v · ~n
• the part of the mass that moves normal to the surface and flows
through the boundary of the control volume
• influences the sign
n
v1
v2
Kontrollvolumen
y
n
x
n
n
incoming mass
has a negative sign
outflowing mass
has a positive sign
Scalar product: ~v · ~n
@
@
R
@
~v1
v1x
~v1 =
v1y
−1
~n =
0
~n
−→ −v1x = |~v1| |~n| cos (6 (~v1, ~n))
The sign of the scalar product is not depending on the orientation of
~n in the coordinate system
~n
~n
-
~v
-
~v
-
negative
positive
momentum equation
The respective component of the velocity is used for the computation
of the momentum. The sign of the velocity depends on the coodinate
system.
v3
v 1y
v1
v 2y
n
v
v 1x
y
v2
n
2x
n
x
n
v =0
4
F sx
Fsy
x = −F
x-direction: dI
)} A2
sx = ρ v1x (−v
1x)} A1 + ρ v2x (v
2x
dt
|
{z
|
{z
~v1·~n
~v2·~n
dIy
y-direction: dt = Fsy = ρ v1y (−v1x) A1 + ρ v2y (v2x) A2 + ρv3y v3y A3
momentum equation
The choice of the control surface or the control volume is quite important
procedure/criterions
1. sketch the flow
2. define the coordinate system
3. choose the control surface such that
• the integrands in the different directions are known
• the integrands are zero (symmetry plane)
• the geometry of the control surface is simple
• fitting forces are included (or not)
• if necessary use a moving control surface
4. determine the integrals for the special problem
1st example
2-dimensional, frictionless symmetrical
Bernoulli
1 2
1 2
p1 + ρv1 = p2 + ρv2
Schaufel
2
1 22
v
= p3 + ρv3
F
b
p1 = p 2 = p 3 2
v
F
−→ v1 = v2 = v3
y
v
x
B1 v1 = B 2 v2 + B 3 v3
1
B2 = B 3 = B1
given: ρ, v1, B1
2
P
x = R ρ~
momentum equation in x-direction: dI
v
(~
v
·
~
n
)dA
=
Fx
dt
A
ρ(+v
1)(−v
1)B1} + ρ(−v
2)(+v
2)B2} + ρ(−v
3)(+v
3)B3} = −Fsx
|
{z
|
{z
|
{z
inflow
outflow
outflow
1
1
2
ρv1 (−B1 − B1 − B1) = −Fsx → Fsx = 2ρv12B1
2
2
2
sy
1
1
s
3
2nd example
2-dimensional, frictionless, symmetrical
the same as in example no. 1, but with a moving blade
Schaufel
v2
Fsy
b1
v1
F
s
v
v3
stat
y
x
given: ρ, v1,abs, B1, vstat
Fsx = ?
vabs = vrel + vstat
vrel,1 = vabs,1 − vstat
vrel,2 = vabs,2 − vstat
vrel,3 = vabs,3 − vstat
Bernoulli, conti, symmetry vrel,1 = vrel,2 = vrel,3 → B2 = B3 = 12 B1
momentum equation in the absolute or in the relative system
dIx Z
X
= ρ~vabs(~vrel · ~n)dA = Fx
dt
A
6
velocity
mass flux
moving contrul surface
n
v stat
v
v
rel
v
v
rel
abs
abs
~vabs = ~vrel + ~vstat
dIx
= R ρ~vabs(~vrel · ~n)dA = R ρ(~vrel + ~vstat)(~vrel · ~n)dA
A
A
dt
=
Z
A
|
ρ~vstat(~vrel · ~n)dA + R ρ~vrel (~vrel · ~n)dA
A
{z
}
=0
dIx Z
= ρ~vrel (~vrel · ~n)dA =
dt
A
Z
A
ρ~vabs(~vrel · ~n)dA
2 B
Fsx = 2ρvrel,1
1
7.2
Determine the pressure difference ∆p = p2 − p1 in the plotted bifurcation by neglecting the friction.
1
Given: v1, v2, A3 = A, α, ρ = const.
4
7.2
n
n
n
A *3
n
Kontrollfläche
x =
momentum in x-direction: dI
dt
v3
ρ~vx(~v · ~n)dA = P Fx (∆px)
A
R
A∗3 = A3/ sin α
~v · ~n = v3 sin α = v3∗
v 3y
v 3x
dIx
X
= ρv1(−v1)A1 + ρv2v2A + ρv3 cos α(−v3A3) = Fx
dt
Z
X
only pressure force:
Fx = − p~ndA = (p1 − p2)A
conti:
v1A1 + v3A3 = v2A2 → v3 = 4(v2 − v1)
7.2
−→ ∆p = p2 − p1 = ρ(v12 − v22 + 4(v2 − v1)2 cos α)
alternative
Kontrollfläche
n
n
n
p
n
p
3,w
3
Z
ρ
~v
|{z}
v3 cos α
p3, p3,w are unknown
Z
−→ p~n dA cannot be computed
(~
v · ~n{z )dA}
|
−v3A3
example
water is flowing steadily from a large container into the open air. The
inlet is well rounded. At the exit is a nozzle
h
h
A
Determine the fitting force
a) for the standard configuration
b) without inlet and nozzle
Given: A, AD , h, ρ, g
AD
A
g
example
1.) mass flux
Q̇ = vA = vD AD
a) well rounded inlet and nozzle
−→ no losses
−→ Bernoulli
0
D
1 2
pa + ρgh = pa + ρvD
2
sharp edged exit
√
−→ vD = 2gh
Beispiel
b) Borda estuary (separation)
Ablösung
R
−→ losses
−→ no Bernoulli
−→ momentum equation
example
choice of control surface
• exit
• no forces
• no pressure difference
• outside of the pipe
• within the pipe along the wall v = 0
• p(z) = pa + ρg(h − z)
Z
Z
dIx
= ρ~vx(~v · ~n)dA =
ρ~vR(~vR · ~n)dA = ρvRARvR = ṁvR
dt
A
AR
X
= Fa = Fp,x = (pa + ρgh)AR − paAR
s
−→ vD,b = gh < vD,a
example
2.) forces
a)
0
D
forces
exit
not cutting the tank
2 A = (p + ρgh)A − p A + F
ρvD
a
a R
x
D
R
s
vD = 2gh −→ Fx = ρgh(2AD − AR)
example
b)
2 A + ρv 2 A = F + (p − p )A
−ρvR
x
a R
1
R
R R
p1 + 12 ρv12 = pa + 12 ρva2 → v1 = va = vR
−→ p1 = pa −→ Fx = 0
1
a
p
p
2
R
delta p = rho g h
rho/2 v
2
rho/2 vmax
p
a
x
rho/2 g h
x
different forms of propellers
1.) sharp edged inlet
Bernoulli
P
Impuls
Impuls
P
Ablösung
2.) well rounded inlet
Bernoulli
different form of propellers
3.) pipe with nozzle
Impuls
Ablösung
Bernoulli
summary
• well rounded inlet −→ Bernoulli
• sharp edged inlet −→ momentum
• sharp edged exit −→ Bernoulli
• losses (separation, mixing, ...) −→ momentum
• power −→ momentum
• outer forces −→ momentum
but:
• for special problems both equations are necessary
• if Bernoulli is valid the momentum equations is also valid
• don’t forget the continuity equation
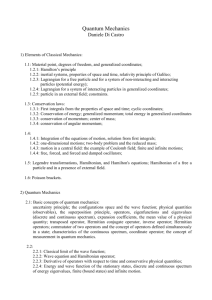
Rankine‘s theory of jets
Propeller, windmills, ship’s screws
• 1-dimensional flow
• no influence of the rotation
• distribution of force is constant across the cross section
• acceleration or deceleration
Rankine‘s theory of jets
1’
2’
p1’
p2’
v2
A1
pa p
1
p
v1
v
v1
v1
∆m
v’
v2
p1’
p2’
p2
x
A2
Rankine‘s theory of jets
continuity:
ρv1A1 = ρv1‘ A‘ = ρv2‘ A‘ = ρv2A2
Bernoulli:
ρ 2
ρ ‘2
‘
1 −→ 1‘ : pa + v1 = p1 + v1
2
2
ρ 02
ρ 2
‘
2‘ −→ 2 : p2 + v2 = pa + v2
2
2
momentum: control volume
−ρv ‘2A0 + ρv ‘2A0 = (p‘1 − p‘2)A‘ + F
−→ F = (p‘1 − p‘2)A > 0
continuity:
∆ṁ = ρA2(v1 − v2)
Rankine‘s theory of jets
momentum: control volume
−ρv12A∞ + ρv22A2 + ρv12(A∞ − A2) + ∆ṁv1 = F
..
−→ F = ρv2A2(v2 − v1) = ρv‘A‘(v2 − v1)
1
0
theorem of Froude: v = (v1 + v2)
2
ρ 0 3
v2
v22
power: P = Q̇∆p0 = A v1 (1 + )(1 − 2 ) ∼ v13
4
v1
v1
Pmax
∂P
8 3
maximum power: v2 = 0 −→
= ρv1
0
∂( v )
A
27
1
F
4 2
maximum thrust: 0 = − ρv1 ∼ v12
A
9
7.8
Two fans sucking air from the surrounding differ in their inlets
Given: ρ, A, ∆p
Compute
a) the volume flux,
b) the power of the fans,
c) the force on the fitting.
7.8
Bernoulli 2 −→ 3:
0
1
p2 + ρ2 v22 = p3 + ρ2 v32
2
3
p0
ρ/2 v2
ρ/2 v2
8
p
0
→ p2 = p3 = pa
p3 = p a
∆ p = ∆ p0
1
2
pa + 0 = p1 + ρ2 v12
(∆p = p2 − p1)
3
v
u
u
u
u
u
u
t
2
2
−→ v1 = ρ ∆p −→ Q̇ = v1A = ∆pA
ρ
v
u
u
u
t
Bernoulli −∞ −→ 1:
7.8
1st theorem for steady flow processes: P = Q̇∆p0
ρ 2
ρ 2
here: ∆p0 = p02 − p01 = p2 + v2 − p1 − v1 = p2 − p1 = ∆p
2
2
v
u
u
u
u
u
u
t
Fsx
A
8
v
8
v
8
2
−→ P = ∆pA ∆p
ρ
7.8
assumption: flow field can be described using a point sink
→ no direction at infinity
→ the velocity is constant
→ A∞v∞ = Av
Av
→ v∞ =
A∞
momentum flux for A∞
dI~
=
dt
v
u
u
u
u
u
u
u
t
I
dI
dI
+ = | A∞ ρ |{z}
~v (~
v {z· ~n)} dA| <
|
dt x
dt y
v∞
≤v
∞
2 dA = ρv 2 A∞
< A∞ |ρ~v (~v · ~n) dA| ≤ A∞ ρv∞
∞
I
I
Av
ρv 2A2
ṁ
dI~
→
<
=
→ 0 for A∞ → ∞
v∞ =
A∞
dt
A∞
ρA∞
7.8
impossible at the exit
−→ directed flow
momentum equation
I
dI
2
| |x = ρv A = −pa A∞ ~ndA + Fsx
dt
−→ Fsx = ρv 2A = 2∆p · A
7.8
Ablösung
0
1
2
3
∆ pv
ρ /2 v2
pa
∆p
0
1
2
3
v
8
v
8
7.8
A
8
Fsx
momentum equation
ρv 2A = paA∞ − (pa(A∞ − A) + p1A)
= (pv a − p1)A = ∆pA
u
v
u
u
u ∆p
u ∆p
u
u
−→ Q̇ = ut ρ A
v1 = v = ut
ρ
7.8
power:
v
u
u
u
t
P = ∆p0Q̇ = ∆pA ∆p
ρ
Fsx
ρv(−v)A + ρvvA = (p1 − p3)A + Fsx −→ Fsx = ∆pA
momentum of momentum equation (angular momentum)
2nd Newtonian law + trnasport theorem of Reynolds
→ momentum of momentum equation (Vector equation)
Z
∂ Z
X
~a
(~
r
×
~
v
)ρdV
+
(~
r
×
~
v
)ρ(~
v
·
~
n
)dA
=
M
KV
KF
∂t
Moments of pressure forces:
Moments of volume forces:
Moments of friction forces:
Moments of outer forces:
~ p = − RKF p(~r × ~n)dA
M
~ g = RKF (~r × ρ~g )dV
M
=0
M~R = − RKF ~r × (σ ~n)dA
~ s = r~s × F~s
M
∂ R
steady flow: ∂t
r × ~v )ρdV = 0
KV (~
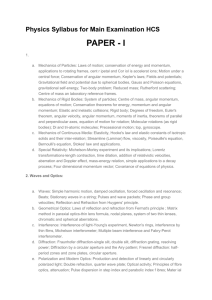
rotation around an axis (instead of a point) → scalar equation
momentum of momentum equation (angular momentum)
R o ta tio n s a c h s e
M=
Z
KF
K F
d A
r
n
v
v
ta n g e n tia l
vtangential · |~r| · ρ(~v · ~n)dA
usually: steady, fixed rotation axis, rotational symmetrical
→ quasi 1 dimensional
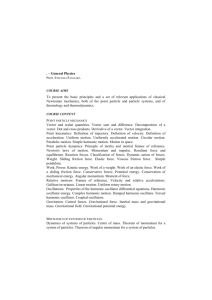
momentum of momentum equation (angular momentum)
assumption: pressure and velocity only depend on the radius
∂
∂
=
=0
∂z ∂θ
control surface: segment of a circle
v dθ
2
dr
p− dp dr
dr 2
p
v
p+ dp dr
dr 2
dθ
r
p(r)
v(r)
v
v dθ
2
(r−dr ) dθ
2
p
(r+ dr ) dθ
2
momentum of momentum equation (angular momentum)
dθ dr = (p − dp dr )(r − dr )dθ − (p + dp dr )(r + dr )dθ+
−ρvv dθ
dr
−
ρvv
2
2
2
2
dr 2
dr 2
+2 · pdrsin dθ
2
dr
dp dr
dp dr dr
dθ
2
dr = prdθ − p dθ −
rdθ +
dθ
⇒ − 2ρv
2
dr 2
dr 2 2
dr
dp dr
dp dr dr
dθ
− prdθ − p dθ −
rdθ −
dθ + 2pdr
2
dr 2
dr 2 2
2
dp
2
dr rdθ
⇒ ρv dθdr =
dr
2
dp
v2
⇒
=ρ
dr
r
v
dp
mit ω = ⇒
= ρω 2r
r
dr
7.11
A sprinkler with three arms is supplied by a large tank and rotates
with the angular velocity ω = const.. The angle between the outflowing jets and the circumferential direction is α.
H = 10 m, R = 0, 5 m, h = 1 m,
A = 0, 5 · 10−4 m2, A1 = 1, 5.10−4 m2, α = 30◦
pa = 105 N/m2, ρ = 103 kg/m3, g = 10 m/s2,
ω = 15 s−1
Determine
a) the relative exit velocity, b) the torque and the volume flux,
c) the pressure p1, d) the maximum torque.
7.11
a)
~va = vabsolut
~vr = vrelativ
ω
~ · R = vvehicle
vr using Bernoulli with an additional term
~va = ~vr + ω
~R
w 2 R2
ρ 2 Z s2 ~
ρ 2
0 → 2 : pa + ρgH = pa + vr − s0 ρ(b · d~s) = pa + vr − ρ
2
2
2
s
m
2
2
=⇒ vr = 2gH + w R = 16
s
7.11
b) steady flow in a moving coordinate system
Z
~ = Σ ~r × F~
=⇒ KF (~r × ~v )ρ~v · ~ndA = ΣM
KV
Z
~
=⇒ M = KF (~r × ~va) ρv~r · ~ndA
|~r × ~va| = |R(ωR − vr cos α)|
momentum for three arms:
=⇒ M = 3ρvr AR (ωR − vr cos α) = −6.8 N m
~ operates in the direction of ω
the momentum M
~ . F~ and ~v are directed
contrarily.
3
m
Q̇ = 3vr A = 2.4 · 10−3
s
7.11
c) Bernoulli 0 −→ 1:
ρ 2
pa + ρg(h + H) = p1 + v1
2
Q̇
v1 =
A1
ρ Q̇2
N
5
=⇒ p1 = pa + ρg(h + H) −
= 0.82 · 10
2
2 A1
m2
d)
dM
=0
dω
=⇒ Maximum for ω = 0
s
s
=⇒
vr =
√
2gH
=⇒ M = 3ρ 2gHAR − 2gH cos α = −6ρgHAR cos α = 13 N m
7.12
A tank with the weight G is fixed in a rotatable bearing in D. Its
drain-pipe has a 90◦-bend. The center of gravity of the system has
the distance h to point D. What is the angle α between the pipe-axis
and the vertical axis, if the water flows without friction?
Given: G, l, h, A, ρ
Hint: The tank is such large that the water surface is not moving.
7.12
momentum of momentum:
R
~
r × ~v )~v · ~ndA = ΣM
KF ρ(~
=⇒ ρlv12A = Gh sin α
Bernoulli 0 −→ 1 :
s
v1 = 2gl cos α
ρl2gl cos α = Gh sin α
Gh tan α =ρl2gl
ρl2gl
=⇒ α = arctan
Gh
=⇒
=⇒
=⇒
ρ 2
ρgl cos α = v1
2