pirson's method for stratification in several layers earth using neural
advertisement

PIRSON’S METHOD FOR STRATIFICATION IN SEVERAL LAYERS EARTH USING
NEURAL NETWORK
José Francisco Rodrigues 1, Renato Crivellari Creppe 2, José Alfredo Covolan Ulson 3, Paulo José Amaral Serni 4, Rogério
Andrade Flauzino 5
1
School of Engineering Bauru/UNESP, Bauru, Brasil, jfranc@feb.unesp.br
Scholl of Engineering Bauru/UNESP, Bauru, Brasil, creppe@feb.unesp.br
3
Scholl of Engineering Bauru/UNESP, Bauru, Brasil, ulson@feb.unesp.br
4
Scholl of Engineering Bauru/UNESP, Bauru, Brasil, paulojas@feb.unesp.br
5
Scholl of Engineering Bauru/UNESP, Bauru, Brasil, flauzino@feb.unesp.br
2
Abstract: Systems based on artificial neural networks have
high computational rates due to the use of a number of
simple processing elements and the high degree of
connectivity between these elements. In this paper, a neural
approach is developed to aid in designs of electric
grounding. More specifically, artificial neural networks are
used for mapping of the ground in horizontal layers.
Simulation results are presented to demonstrate the validity
of the proposed approach.
Keywords: Pirson’s method, soil stratification, neural
networks.
1. INTRODUCTION
The basic purpose of an electric grounding system is to
provide safety for human beings as well as to maintain the
integrity of equipments protected by such system.
Specified the place for installation of the grounding system,
it will be give beginning to project through the soil electric
resistivity measures () for different spacings (a) or depths
among the electrodes. The measurement methods are
obtained from results provided by the analysis of Maxwell’s
equations from electromagnetism, which are applied to the
soil [1].
In the curve of resistivity in relation to the depth,
obtained from experimental measurements, is based on
whole methodology used in soil stratification, which allows
the elaboration of the grounding project.
Among the methods of soil stratification in several
layers, which use in their calculations the resistivity curve in
relation to the depth, are the following:
Pirson’s method;
Graphic method
In this paper, the Pirson’s method is used as basis for the
development of the work. This method has been chosen
because it represents an extension of the well-known
method titled as “two-layers method”.
2. INITIAL CONSIDERATIONS
The organization of this paper is presented as follows. In
item 3, the neural networks with general considerations and
biological neuron is apresented. In item 4, the soil
stratification process is formulated in its conventional form.
In item 5, the Pirson’s method is introduced and used as
basis for the development of this work. In item 6, the neural
applications are developed to aid in the electric grounding
project. Simulation and results analysis are presented in item
7 in order to validate the proposed application. Finally, in
Section 8, the key issues raised in the paper are emphasized
and conclusions drawn.
3. NEURAL NETWORKS
3.1. General considerations
The purpose of neural computation is to discover the
general principles upon which the solutions the human brain
devises are based and to apply these principles to
computational systems. ANN (Artificial Neural Network)
researchers believe that the brain, constituted of neurons,
builds its own information processing strategies based on
what is commonly called “experience”.
ANNs have been used in several applications, among
them Pattern Recognition, Sign Processing, Speech
Processing, Robotics, and Systems Optimization. The
characteristics that make the ANN methodology interesting
from the standpoint of problem solving are:
a) The capacity to “learn” through experience. This
“learning” process is believed to occur when the network
manages to map generalized solutions for a class of
problem.
b) Efficient performance in processes which lack explicit
knowledge about how to identify feasible solutions.
c) It does not require the identification of possible
mathematical models that describe the behavior of the
analyzed system.
d) High immunity to noise; in other words, the network’s
performance does not collapse when information is incorrect
or absent.
3.2. Biological neuron
The origin of the ANN theory goes back to the
mathematical and engineering models of biological neurons.
The nerve cell, or neuron, was identified anatomically and
described in considerable detail by Spanish neurologist
Ramóny Cajal in the 19th century. The neuron has a cellular
1
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
675
Pirson’s Method for Stratication in Serveral Layers Earth Using Neural Network
José Francisco Rodrigues, Renato Crivellari Creppe, José Alfredo Covolan Ulson, Paulo José Amaral Serni, Rogério Andrade Flauzino
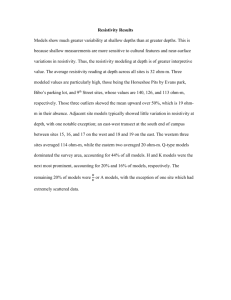
body, or soma, that contains within it most of its organelles.
From the soma of each neuron emerge prolongations that are
functionally divided into connections called dendrites and
axons [2], as illustrated in Figure 1.
The neuron is a highly specialized cell that receives
electric impulses from its dendrites, processes them in the
soma and finally transmits them through its axon (usually a
single one) to the dendrites (or even to the some) of other
neurons. The connection between an axon of a neuron and a
dendrite of another neuron is called a synapse, as illustrated
in Figure 2. The synapse is the basic functional unit for the
construction of biological neural circuits and involves the
position of the plasmatic membranes of two neurons so as to
form a point junction (the size of a synaptic junction is
smaller than a post-synaptic neuron).
to the solution of this problem. The training of an ANN may
involve the use of different learning mechanisms: supervised
– in which the desired results are supplied entirely, and
unsupervised – in which the ANN itself is capable of
adjusting its own functioning. Most ANNs use the
supervised learning mechanism, which can be considered as
the network’s capacity to modify its performance based on a
comparison between the response obtained and the desired
response.
ANNs are trained with experimental learning data. The
quality of the data is important for the learning process,
exerting a strong influence on network performance.
Learning is a previous stage and consists of adjusting the
weights and biases of the ANNs whose transfer functions
and neural structures have been predefined. Once an ANN
has been trained, it is used for the reproduction of output
data corresponding to new input data. The ANN’s
performance is evidenced in this stage.
All ANNs are composed of mathematical elements called
neurons, as clearly shown in Figure 3.
Fig. 1. Simplified diagram of a neuron.
Fig. 3. Diagram of a neuron.
The neuron receives, as input, a signal (number), p,
multiplied by a weight, w, and a linear term, the bias, b.
This input is added and treated by a function, F, of the
neuron, producing the signal, i.e., the number a, as output.
Expressed in mathematical terms, one has:
a F(w.p b)
(1)
The weight w and the bias b are adjustable parameters of
the neuron and the ANN. Now, using a general model of the
artificial neuron, as shown in Figure 4, one has:
Fig. 2. Simplified diagram of a synaptic connection.
An ANN is composed of a great number of processing
elements, also called processing units, which are widely
interconnected. Each of these links connects only two
processing elements, usually in the same direction, and has a
value that determines the degree of connectivity between
them, called weight of the connection. Thus, the entire
processing is carried out distributively among the network’s
processing elements, sending its results to other units
through the connections between them. For this reason,
ANNs are known as distributed and parallel processing
(DPP) systems. The manner in which the processing
elements are interlinked is called topology or
interconnection pattern. Modifications of the synaptic
weights of an ANN do not represent a major problem from a
mathematical standpoint, but they may be a serious problem
in practice, for computational resources are limited and the
processing time is proportional to the amount of resources
required.
The ANN training process should be capable of gradually
modifying an initial interconnection pattern so as to adapt it
x1, x2 ... xN : are the input signals.
w1, w2 ...wN : are the weights.
is the polarization associated to the neuron.
u
is the output of the linear combiner.
g(.) is the neuron’s activation function.
y is the neuron’s output signal, or its activation state.
In this model, the input signals xi are weighted
(multiplied) by the respective weights wi (synapses); if the
value of wi is positive, the synapse will be excitatory;
otherwise, the synapse will be inhibitory. The polarization
value and the input signals xi, weighted by the neuron’s
respective wi synapses, are then added and the value of u is
applied to the activation function g(.) in order to limit the
value of the neuron’s output signal y. In mathematical terms,
one has:
2
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
676
N
u wi .x i θ
i 1
(2)
y = g(u)
(3)
4. SOIL STRATIFICATION PROCESS
Considering the characteristics that usually present the
soils, by its own geologic formation along the years, the
modeling in stratified layers, that is, in horizontal layers, it
has produced expressive results that are proved in practice.
The mathematical modeling of the soil in two horizontal
layers is generally made applying the foundations and
theories of the electromagnetism. With the aid of
measurements carried out by the Wenner’s Method [2], it is
possible to found the soil resistivity referent to the first and
second layers, as well as their respective depths.
I
Soil Plane
A
Fig. 4. Model of an artificial neuron.
Based on equations (2) and (3), one finds that the
activation function (g) simply processes the set of inputs
received and transforms it into the activation state. The
range of variation of the neuron’s output normally lies
within the interval of [0,1] or [-1,1].
The most typical activation functions are:
h
First
Layer
Second
Layer
a) Step function:
In this type of activation function, one has:
1, if u 0
g(u)
0, if u 0
Fig. 5. Soil into two layer scheme.
In the Wenner’s method, an electric current flowing
through the point A, in a soil of two layers as observed in
Figure 5, generates potentials in the first layer that should
satisfy the following equation:
(4)
b) Sigmoidal function:
In this type of activation function, one has:
1
g(u)
β u
1e
where is the tangent at the point of inflection
2V = 0
From development of equation (7), for any point p into
first layer of the soil and distancing r of the current source
A, it has a potential Vp defined by:
(5)
Vp
c) Hyperbolic tangent function:
1 e
1 e
u
u
I1 1
Kn
2
2 r
2
2
n
1
r
(
2
nh
)
(8)
where, Vp is the potential of a point p (belonging to the first
layer) in relation to the infinite; 1 is the first layer
resistivity; h is the relative depth to the first layer; r is the
distance from point p to the current source A; and K is the
reflection coefficient defined by:
In this type of activation function, one has:
g (u )
(7)
(6)
2
1
2 1
K
1
2 1 2
1
1
For this activation function, the neuron’s output can
assume real negative and positive values in the domain of –1
and 1.
(9)
where 2 represents the second layer resistivity.
3
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
677
Pirson’s Method for Stratication in Serveral Layers Earth Using Neural Network
José Francisco Rodrigues, Renato Crivellari Creppe, José Alfredo Covolan Ulson, Paulo José Amaral Serni, Rogério Andrade Flauzino
From analysis of equation (9), it is verified that the
variation of the reflection coefficient is limited to interval [1, 1].
Applying this formulation in the Wenner configuration,
it is verified that the relative resistivity in relation to the
superficial resistivity for a spacing a can be expressed by:
(a)
1 4 [
1
n 1
Kn
1 2n h
a
2
Kn
4 2n h
a
2
To stratify a soil in two layers, it is first necessary to
draw in a graph the curve ( x a) obtained by Wenner’s
method. In this curve, the value of the superficial resistivity
is not determined, that is, the value of the soil resistivity ( 1)
when h/a is zero it is ignored. Therefore, this value should
be estimated according to some extrapolative numeric
method. Therefore, it is recommended to make several
measures through Wenner’s method for small distances.
This is justified because the penetration of currents is made
predominantly through the first layer.
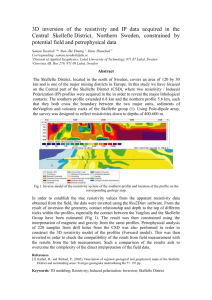
Observing the behavior of the curve ( x a) in figure 6,
the sign K is determined by:
If the curve is descending, the sign K is negative;
If the curve is ascending, the sign K is positive.
(10)
]
As the variation of the reflection coefficient K is small,
and it is limited between [-1, 1], can then to trace a family of
curves (a)/1 in relation to h/a, for negative and positive
values K, covering its entire variation zone.
Soon after, it is chosen an arbitrary value of spacing a1,
belonging to the group of measurements, and is calculated
(a1)/1 or 1/(a1). From the corresponding theoretical
curves, shown in Figure 6, it is obtained the values
corresponding of K and h/a. With these values, a table is
generated with values of K and h/a (multiplied by a1
previously chosen) that will serve for to draw a (K x h)
graph. Another value of a is then chosen and the same
procedure is repeated until the drawing another (K x h)
graph, which should be done in the same (K x h) graph used
for a1.
The intersection point of both curves (K x h) will result
in the real values of K and h1; consequently, through
equation (9), the value (2) is obtained.
(a1)
1
(a) Curve for K Varying Negatively
5. PIRSON’S METHOD
h
a
(a
Pirson’s method can be seen as an extension of the twolayer method. When dividing the curve ( x a), in ascending
and descending spaces, is evidenced that the soil of two
layers can be analyzed as a sequence of soil curves
equivalent to the two layers.
Considering the first space as a soil of two layers, it is
obtained the values 1, 2 and h1. When we analyze the
second space, firstly determine an equivalent resistivity,
seen by the third layer. Thus, it is obtained the resistivity 3
and the depth of the equivalent layer. This methodology is
followed for the computation of the resistivity of other
layers.
In Pirson’s method, the procedure for stratification is
similar to that of two layers. Firstly, it is necessary to draw
in a graph the curve obtained by the Wenner’s method.
Again, in this curve the value of the superficial resistivty is
not identified, that is, the value of soil resistivity when h/a is
zero is indeterminate.
Immediately, the curve ( x a) is divided in ascending
and descending spaces. These spaces are identified from the
inflection points, that is, where the curve concavity changes
the sign. The inflection points can be obtained through the
following equation:
(a1)
1
(b) Curve for K Varying Positively
h
a
(a
Fig. 6 Descending and ascending curves ( x a).
The curves drawn for K varying in the negative zone are
represented in figure 6(a) and the curves for K varying in the
positive zone are in figure 6(b).
With base on the family of theoretical curves, figures
6(a) and 6(b), it is possible to establish a method that makes
the matching of the curve, measured by Wenner, with a
certain characteristic curve. This private curve is
characterized by values that define the soil stratification
process [1].
d2
da 2
0
(11)
The values 1, 2 and h1 are obtained in the same way as
presented in the two-layers method.
4
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
678
(12)
To contour these imperfections, a new methodology,
based on artificial neural networks, is developed to estimate
the values that were previously obtained through
approximations.
The proposed application here for the soil stratification
process in electric grounding is composed by four main
phases. These phases are defined by:
ĥ 2 is the estimated depth in second layer.
at is the relative spacing to point of transition in second
Phase (I): Obtaining of resistivity measurements in relation
to the spacing.
Phase (II): Estimation of resistivity values in the first layer
through the ANN-1 (Artificial Neural Network-1).
Phase (III): Identification of inflection points through the
application of a numerical method.
Phase (IV): Estimation of depths values h/a through the
ANN-2.
Considering the second space of the curve ( x a), the
equivalent resistivity should be calculated seen from third
layer. So, it is estimated the depth of the second layer ĥ2 by
using the Lancaster-Jones’ method [1], that is:
2
hˆ2 d1 dˆ2 at
3
where:
d1 = h1 is the thickness in first layer.
d̂ 2 is the estimated thickness in second layer.
space, which is obtained when
d2
da 2
0.
In Phase (I), the resistivity measures () in relation to
spacing (a) are obtained (from experiments) by the
Wenner’s method.
Consequently, it is calculated the equivalent medium
resistivity ̂ 12 , seen from third layer, using the Hummel’s
method [3], that is the weighted harmonic average between
first and second layer, that is:
ˆ 12
d dˆ2
1
d1 dˆ2
1 2
1 (n-1)
Z-1
1(n-2)
(13)
ANN-1
(TDNN)
1(n-p+1)
For second space in the curve, the process is similar to
that of two layers, presented in the previous section,
1(n)
Z-1
1 (n-p)
considering now ̂12 as the first layer resistivity. Thus, it is
obtained the new estimated values of ̂3 and ĥ 2 .
Fig. 7 ANN-1 architecture.
The process is repeated for other spaces of the curve and
the stratification by Pirson’s method is finished
In Phase (II), the resistivity value (1) is obtained
through artificial neural networks of type perceptron with
time delay (Time-Delay Neural Network–TDNN) [4] as
illustrated in figure 7. Based on the resistivity values
obtained initially in Phase (I), it is determined other
intermediary values that are used as input vectors to training
of the TDNN. After the training process, the network is
capable to estimate the resistivity value (1), that implies in
an estimation of a forward step. The prediction order (p)
assumed in the simulations was 5.
In Phase (III), the identification of inflection points that
define the ascending and descending spaces of the curves
were automatically obtained by applying the Newton's
method [5] used to find roots of functions.
In Phase (IV), the estimation of the depth values h/a are
obtained through a multilayer perceptron (MLP) network [5]
with only a hidden layer (figure 8). The input variables used
in the training of the network were the reflection coefficient
K and the value (a1)/1 or 1/(a1). The number of neurons
used in the hidden layer was 10, and the amount of vectors
belonging to training set was around 1000 vectors.
6. NERUAL APPLICATION
In this paper, a neural application is developed to aid the
processes of soil stratification.
The necessity of reduction in the approximation stages
is due to fact of minimizing the imperfections caused in
relation to the experimental interpretations involved with the
process. These procedures types that are presented in the
project of an electric grounding, they generally do not
follow an explicit methodology for their estimation
processes, but they involve the intuition and the experience
of whom executes them. Therefore, some stages of
stratification become empiric and the results obtained by
any presented methods will not depend on only the efficien
Stages as the extrapolation of the curve ( x a) in order
to obtain the resistivity value in the first layer are frequently
simplified from extension of the curve to the intersection
with the ordinates axis. Another process of existent
approximation is the standard use of curves, which implies,
again, in readings of values directly in graphs.
5
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
679
Pirson’s Method for Stratication in Serveral Layers Earth Using Neural Network
José Francisco Rodrigues, Renato Crivellari Creppe, José Alfredo Covolan Ulson, Paulo José Amaral Serni, Rogério Andrade Flauzino
Estimating Value 1 – Phase II
K
ANN-2
(MLP)
(a1)/1
Through ANN-1, it is estimated the resitivity value (1 )
in the first layer. This value is obtained through calculation
of the resistivity in the spacing point {a = 0}. After the
training of TDNN, the value 1 obtained through estimation
of a forward step is given by 1 = 8575 .m.
h/a
1/(a1)
Identification of Inflection Points – Phase III
Using the numeric method for identification of inflection
points, it was obtained only one inflection point in the curve
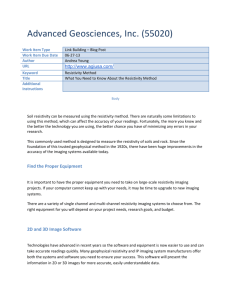
of figure 9, whose value is given by at = 8.0174 m.
Fig. 8. ANN-2 architecture.
After computation of these four phases, the soil
stratification process can be concluded with the application
of the equations defined in item 4.
Estimate Values h/a - Phase IV
Through ANN-2, it was obtained the values shown in table 2
taking into account the values of a1 and its respective resistivity
values.
7. SIMULATION AND RESULTS ANALYSIS
To elucidate the proposed application, the results
obtained with the simulation of the four phases defined in
the previous section are presented.
Table 2. Estimated values (first spacing).
a1 = 1m; 1/(a1) = 0.7183
Obtaining the Curve ( x a) – Phase I
K
Through Wenner’s method, it is obtained a group of
spacing measures and soil resistivity as presented in table 1.
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Table 1. Measurements data
Spacing
a (m)
1
2
4
8
16
32
Resistivity
(.m)
11938
15770
17341
11058
5026
3820
x 10
h(m)
K
0.2161
0.4502
0.5943
0.7074
0.8074
0.8894
0.9705
1.0465
1.1246
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
h (m)
a2
0.1101
0.2671
0.3942
0.4922
0.5703
0.6443
0.7174
0.7834
h(m)
0.2201
0.5343
0.7884
0.9845
1.1406
1.2886
1.4347
1.5668
2
0
4
1.6
h
1.4
0.2161
0.4502
0.5943
0.7074
0.8074
0.8894
0.9765
1.0465
1.1246
a2 = 2m; 1/(a2) = 0.5475
Drawing the curves K x h (Figure 10) and applying a
interpolative method, both them intercepted in the following
point:
h1 = d1 = 0.6266 m ; K = 0.4439
Figure 9 illustrates the graph of resistivity () in relation
to spacing (a).
1.8
h (m)
a1
1.2
-2
-4
1
-6
-1
0.8
-0.5
0.5
1
Fig. 10 Curves h x K (first spacing).
0.4
0.2
0
k
0.6
0
5
10
15
20
25
30
Using equation (9), the value 2 is calculated by:
35
a
2 = 22265 .m
Fig. 9. Resistivity ( 1 ) in relation to spacing (a).
6
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
680
20
Considering the second space of the curve ( x a), it
should be estimated the depth of the second layer. Applying
equation (12), we have:
-20
2
hˆ2 d1 dˆ2 at
3
ˆ
ˆ
h2 0.6266 d 2 2 8.0174 5.3449 m
3
dˆ 4.7183 m
-40
-60
-80
2
-100
The equivalent medium resistivity can be calculated by
the Hummel’s equation (13), that is:
-120
-1
1 K
1 K
1 (0.7439)
3 18440
2708 Ω.m
1 (0.7439)
3 ˆ 12
Therefore, the obtained solution, according to the
application proposed in this paper, was a soil stratification in
three layers, as illustrated in figure 12.
Table 3. Estimated values (second spacing).
-1.0
0.8754
2.1611
3.5778
4.4342
5.1306
5.6908
6.1551
6.5873
a4 = 16m; (a4)/ ̂ 12 =
0.2726
h (m)
h(m)
K
a4
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6 0.1871
2.9935
-0.7 0.3432
5.4907
-0.8 0.4232
6.7714
-0.9 0.4862
7.7799
7.0035 -1.0
0.5383
Soil
Plane
6.0041 m
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
-0.8
-0.9
h(m)
1
Thus, it is obtained the value of 3:
a3 = 8m, with resistivity (a3) = 11058 .m
a4 =16m, with resistivity (a4) = 5026 .m
h (m)
a3
0.2701
0.4472
0.5543
0.6413
0.7114
0.7694
0.8234
0.5
Fig 11. – Curves h x K (second spacing).
Repeating the previous procedures for the second space
of the curve, it is generated from the neural network
developed (ANN-2) the values presented in table 3, being
adopted the values following:
K
0
k
d1 dˆ2
0.6266 4.7183 18759 m
0.6266 4.7183
d1 dˆ2
8575
22265
1 2
a3 = 8m; (a3)/ ̂ 12 = 0.5997
-0.5
0.6266 m
ˆ 12
0
h
First
Layer
1=8575 .m
Second
Layer
2=22265 .m
8.6123
3=2708 .m
The interception of the curves is shown in Figure 11
whose values are given by:
Fig. 12. – Soil stratification in three layers.
h2 = 6.0041 m ; K = - 0.7439
From the Figure 12, it is verified that the resistivity
obtained to first layer was 1 = 8575 .m with a depth of
0.6266 meters. The resistivity obtained to second layer was
2 = 22265 .m, having a depth of 6.0041 meters. Finally,
for the third layer was obtained a resistivity 3 = 2708 .m.
Table 4 compares the results obtained by the neural network
with the values obtained from Pirson’s method.
7
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
681
Pirson’s Method for Stratication in Serveral Layers Earth Using Neural Network
José Francisco Rodrigues, Renato Crivellari Creppe, José Alfredo Covolan Ulson, Paulo José Amaral Serni, Rogério Andrade Flauzino
defects of phase A to ground, a fault impedance of five
ohms, and a 90-degree angle of fault incidence. This
approach also allows for the study to be extended to other
types of configuration, for variations in the type of fault and
in fault resistance values, as well as to locate the distance of
the fault’s point in relation to the substation, factors that
other studies have aimed at.
Table 4. Results comparison.
1
2
3
H1
H2
Neural
Application
8575 .m
22265 .m
2708 .m
0.6266 m
6.0041 m
Two Layers
method
8600 .m
21575 .m
3103 .m
0.6400 m
5.6400 m
ACKNOWLEDGMENTS
Thanks the São Paulo State University - Research ProRectory /UNESP for approval this research project.
As observed in this table, it is verified that the results
obtained by the neural network are very close to the results
provided by Pirson’s method. The simplicity and efficiency
of the proposed neural application indicates that the
methodology can be used as an efficient alternative to
estimate the variables related to the electric grounding
project.
REFERENCES
[1] G. Kindermann, J. M. Campagnolo “Aterramento
Elétrico”, 3 ed., Editora Sagra-DC Luzzatto, 1995.
8. CONCLUSIONS
[2] Z.L. Kovács, Redes Neurais Artificiais, 4 ed., Edição
Academica:São Paulo, 2006.
After In this paper, an approach using artificial neural
networks was developed with the objective of automating
the processes of soil stratification for electric grounding,
because the conventional processes usually depend on the
experience and the planner's sensibility.
The application of artificial neural networks was shown
efficient to estimate values, which were before obtained
through graphs. In function of this fact, the process becomes
faster due to the simple and efficient type that the network
offers for the processing of data picked from experiments.
Thus, the use of artificial neural networks besides
providing a new method for the process of soils
stratification, it presents results that are similar to the real
values.
The method utilized here is independent of the fault
conditions, and of those of the system. This indicates the
easy adaptation of ANNs to this type of study, without
requiring the use of aerial electric power line equations to
locate the fault point, and requiring only the use of a high
performance software program to simulate faults and a good
analysis to extract the characteristics of the signals.
Another advantage is the easy implementation of this
locating algorithm in Operation and Control Centers.
The methodology employed here was designed for a
configuration containing three sections, simulation of
[3] C. M Leite, M. L. Pereira Filho “Técnicas de
Aterramentos Elétricos”, 2 ed., Editora Officina de
Mydia, 2001.
[4] S. Haykin “Neural Networks – A Comprehensive
Foundation”, Macmillan. Englewood Cliffs – NJ, USA,
1994.
[5] B. Kosko “Neural Networks and Fuzzy Systems – A
Dynamical
Systems
Approach
to
Machine
Intelligence”, Prentice-Hall, Englewood Cliffs – NJ,
USA, 1992.
[6] M. S. Bazaraa, C. M. Shetty “Nonlinear Programming –
Theory and Algorithms”, 3 ed., John Wiley & Sons,
New York – NY, USA, 2006.
[7] Matlab, The Language of Technical Computing, The
MathWorks Inc., version 5.2, Natick, Massachussetts,
Usa, 1998.
8
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
682