Cosc 3451 Signals and Systems Motivation Applications

Cosc 3451 Signals and Systems
Introduction
Motivation
• Modeling, characterization, design and analysis of natural and man-made systems
• General approaches -> based upon theoretical and mathematical techniques
• Tools based upon the description and analysis of systems using differential and difference equations
• Time versus frequency domain representations –
Fourier techniques
Applications
• Communications – AM, FM, FSK, PSK, communication channels
• Physical systems modeling and controlseismology, mechanics, chemical process control, aerospace, motor control, thermodynamics, fluid dynamics
• Radio-astronomy, geophysics
• Optics and acoustics
1
Applications
• Biomedical engineering
• Electronics, circuit design
• Neural networks, adaptive systems
• Computer vision, graphics, image and speech processing
• Time series analysis, economic forecasting, stock trends
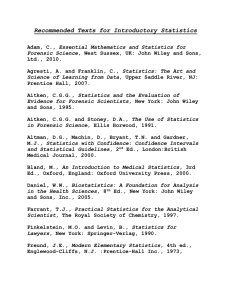
Figure 1.53 (p. 59)
Series RC circuit driven from an ideal voltage source v
1 output voltage v
2
( t ).
( t ), producing
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
• Circuit can be described in terms of a differential equation
2
Figure 1.6a (p. 8)
Structure of lateral capacitive accelerometers.
(Taken from Yazdi et al., Proc. IEEE , 1998)
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Figure 1.6b (p. 9)
SEM view of Analog Device’s ADXLO5 surface-micromachined polysilicon accelerometer.
(Taken from Yazdi et al., Proc. IEEE , 1998)
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Figure 1.64 (p. 73)
Mechanical lumped model of an accelerometer.
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
3
• Can also be described in terms of a differential equation in terms of displacement y(t) and external acceleration x(t)
Biomedical Applications - Heart
Sounds
4
Figure 1.9 (p. 13)
The traces shown in (a), (b), and (c) are three examples of EEG signals recorded from the hippocampus of a rat. Neurobiological studies suggest that the hippocampus plays a key role in certain aspects of learning and memory.
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Biomedical Applications - Brain
Imaging
Biomedical Applications- Imageguided Surgery
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 49, NO. 9, SEPTEMBER 2002
5
Audio Applications – Speaker
Specifications
Audio Applications – Surround
Sound
From www.spatializer.com
Financial Applications – Stock
Trends
Nortel from cnnfn.com
6
Figure 1.10 (p. 14)
(a) In this diagram, the basilar membrane in the cochlea is depicted as if it were uncoiled and stretched out flat; the
“base” and “apex” refer to the cochlea, but the remarks “stiff region” and “flexible region” refer to the basilar membrane.
(b) This diagram illustrates the traveling waves along the basilar membrane, showing their envelopes induced by incoming sound at three different frequencies.
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Computer Vision/Image
Processing
• R. Wildes
Radar Application- Focusing
SAR images
7
Before processing
After focusing using array processing techniques
Remote Sensing (Landsat) http://rst.gsfc.nasa.gov/Intro/Part2_21.html
8
Figure 1.7 (p. 11)
Perspectival view of Mount Shasta (California), derived from a pair of stereo radar images acquired from orbit with the shuttle Imaging Radar
(SIR-B).
(Courtesy of Jet Propulsion Laboratory.)
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Aerospace Applications –
Aircraft dynamics and control
9
Figure 1.4 (p. 7)
Block diagram of a feedback control system. The controller drives the plant, whose disturbed output drives the sensor(s). The resulting feedback signal is subtracted from the reference input to produce an error signal e ( t ), which, in turn, drives the controller. The feedback loop is thereby closed.
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
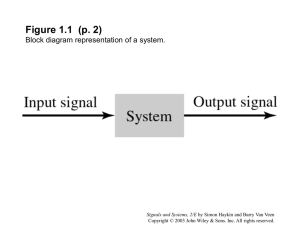
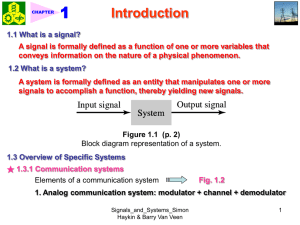
Figure 1.2 (p. 3)
Elements of a communication system. The transmitter changes the message signal into a form suitable for transmission over the channel.
The receiver processes the channel output (i.e., the received signal) to produce an estimate of the message signal.
Signals and Systems, 2/E by Simon Haykin and Barry Van Veen
Copyright © 2003 John Wiley & Sons. Inc. All rights reserved.
Analogue versus Digital Signal
Processing
• Main distinction is continuous versus discrete
• Analogue signal processing – many real world systems are analogue, control and processing in analogue domain with analogue circuits (RLC, diodes, amps ....) or with mechanical or other physical elements
• DSP – digital circuits/program (adders, multipliers and memory)
10
Why Analogue?
• Natural solution of differential equations
• Strong arsenal of techniques for design of analogue filters etc.
• No need for approximation, sampling, numerical computations
• Real time, less complex circuitry
• BUT component values drift, imprecise tolerance, age and temperature variations, difficult with very small and very large components, non ideal realizations
Why Digital?
• Flexible, same hardware can perform multiple functions, upgrade and update possible
• Repeatability and precision, higher-order systems
• Natural for interface with high level supervisory control software
• BUT takes time to compute and circuit complexity is high (especially with general purpose hardware)
• Most systems are ‘mixed’ combining some analogue and some digital components
– digital hardware is so cheap it almost always an option despite increased circuit complexity for digital implementation
• Digital techniques for data acquisition, signal filtering, detection, processing and automatic control are sometimes approximations of analogue solutions and are sometimes fully
‘digital’ designs
11
Necessary/Useful Mathematical
Preparation
• Calculus, especially differential equations
• Linear algebra
– Especially eigenvalue problem, orthogonality, basis functions
• Discrete math, sequences and series, difference equations
• Numerical methods
12