Chapter 6: Introduction to Rotating Machines
advertisement

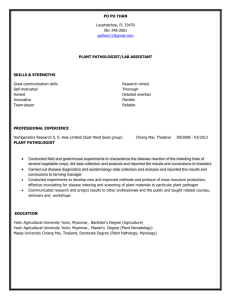
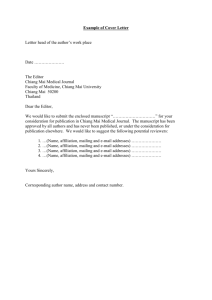
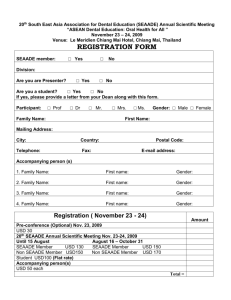
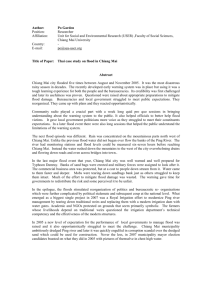
Chapter 6: Introduction to Rotating Machines 1) 2) 3) 4) 5) 6) 7) Energy conversion Electromagnetic principles Electromagnetic principles Motors AC motors DC motors Motor selection Generators Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 1 Chapter 6: Introduction to Rotating Machines Electromechanical Energy Conversion Electrical System y Losses Rotating Machines: •Motors •Generators Coupling field Losses Mechanical System y Losses Generator Motor Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 2 Chapter 6: Introduction to Rotating Machines Electromagnetic principles Electromagnetic principles 1) Electromotive force (EMF) produces current in a conductor. 2) An electric current constitutes magnetomotive force (MMF). 3) Motor action: A magnetic field exerts a force on a current‐carrying conductor. 4) Generator action: A conductor moving through a magnetic field induces an EMF. G i A d i h h i fi ld i d EMF Right Hand Rules g Lorentz Force Law: F q (v B ) F I B Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 3 Chapter 6: Introduction to Rotating Machines Electromagnetic principles Electromagnetic principles F q (v B ) F I B Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 4 Chapter 6: Introduction to Rotating Machines C t ti Construction and Components dC t • The stator is a stationary part containing magnetized poles. containing magnetized poles. • The rotor consists of a rotating shaft supported by bearings shaft supported by bearings. An air gap is between the rotor and th t t the stator. Rotor/Stator Components: • Core (ferromagnetic material). • Windings or coil • Insulation Winding Currents: Winding Currents: • Load current • Magnetizing (exciting) current Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 5 Chapter 6: Introduction to Rotating Machines C t ti Construction and Components dC t • Armature windings refer to a windings which carry ac currents (load current) (load current). • Field windings carry dc current (magnetizing current) producing the main magnetic flux. • Primary windings Pi i di carry both load and magnetizing currents. b th l d d ti i t Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 6 Chapter 6: Introduction to Rotating Machines Types of Rotating Machines f h 1) Synchronous machines •Speed of machines is proportional to frequency of its armature current •Speed of machines is proportional to frequency of its armature current. •Synchronous generators are always used in power generation units. •They require external excitation for generating magnetic flux. 2) Induction (asynchronous) machines • Induction generators seldom use. • 1φ induction motors are used in household applications. • Many industries use 3φ induction motors. 3) DC machines • DC machines provide rapid acceleration or deceleration • Both motors and generators are used. Both motors and generators are used. • DC motors give speed over wide range and constant torque. • DC generators are always used in small units of power generating, e.g., wind turbine turbine. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 7 Chapter 6: Introduction to Rotating Machines Motors oto s DC motors • • • • Permanent Magnet Series Wound Shunt Wound Compound Wound Si l Ph Single Phase Squirrel Cage • • • • • Split Phase Capacitor Start Permanent Split Capacitor Shaded Pole h d d l Two‐Value Capacitor I d ti Induction Wound Rotor Synchronous AC motors Poly Phase Induction Synchronous • • • • • Repulsion • Repulsion Start • Repulsion Induction Shaded Pole Hysteresis Reluctance Permanent Magnet Squirrel Cage W Wound Rotor dR t Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 8 Chapter 6: Introduction to Rotating Machines IInformation from Nameplate f ti f N l t • Device type D i • Manufacturer • Rated voltage and frequency Rated voltage and frequency • Rated current and VA • Rated speed and HP (1HP = 746W) Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 9 Chapter 6: Introduction to Rotating Machines DC Machines DC Machines 1) Main magnetic flux is generated from the stator which can be permanent magnetic material or field windings. p g g 2) Its rotor acts as the armature winding connected with the rotating comumutator. 3) The commutator contact with stationary brushes. 4) For DC motor, the commutator converts DC to AC (current in the armature) ensuring the direction of rotation. 5) For DC generator, the commutator F DC h converts AC (induced AC (i d d current in the armature) to approximating DC at the brushes. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University Brush page 10 Chapter 6: Introduction to Rotating Machines DC Machines DC Machines DC Motors DC Generators Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 11 Chapter 6: Introduction to Rotating Machines DC Machines DC Machines • Developed Torque Tdev K a d I A where K e e a is a machine constant, Φ s a ac e co s a , Φa is s the total magnetic flux per pole and Ia is the armature current. • Speed Voltage (voltage between brushes) Speed Voltage (voltage between brushes) E A K a d m where ωm is rotational speed (rad/s). where ω is rotational speed (rad/s) • Developed Power Pdev E A I A mTdev Loss in DC machines • • Pcu Copper losses (in windings) C l (i i di ) Prot Rotational losses (friction, core losses) Note: Units of rotational speed can be either rad/s or rpm. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 12 Chapter 6: Introduction to Rotating Machines DC Machines Equivalent circuit of DC Machine Motor Generator : Same as motor but armature current is opposite direction Copper Losses Armature Current Pcu I 2f R f I a2 Ra IA VT VA Ra Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 13 Chapter 6: Introduction to Rotating Machines DC Machines Power Flow Pelec • Motor: Pdev Pmech Pin Pelec ; Pout Pmech • Generator: Pcu Prot Pin Pmech ; Pout Pelec Efficiency Pout 100% Pin Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 14 Chapter 6: Introduction to Rotating Machines DC Machines Example: A permanent‐magnet DC machine has armature resistance 3 ohms. When it operates as a generator, it generates the voltage of 100 volts at speed of 1000 rpm. If its armature is supplied by a source of 150 volts operating as a motor compute the following armature is supplied by a source of 150 volts operating as a motor, compute the following quantities: 1) The starting current 2) The induced voltage (back emf) when it runs at 1200 rpm and at 1400 rpm 2) The induced voltage (back emf) when it runs at 1200 rpm and at 1400 rpm. 3) The armature current and developed torque at speed 1200 rpm and 1400 rpm. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 15 Chapter 6: Introduction to Rotating Machines DC Machines Classification of DC Machines 1) Separately Excited • A DC Source is supplied to the field winding. • In generator, the field current is a small fraction of the rated armature current. • Separately excited motors are used in control systems. • For small motor, permanent magnet is used instead of the field windings. K Keywords: d ‐Starting torque (stall torque) Motor torque‐speed curve ‐No‐load speed N l d d Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 16 Chapter 6: Introduction to Rotating Machines DC Machines Cl ifi i Classification of DC Machines f DC M hi 2) Self‐Excited Shunt DC machines • The field winding is connected in parallel with the armature. • For generators, induced voltage from g , g armature is applied to the field. • For For motors, a voltage source is applied to motors a voltage source is applied to both the field and the armature. •A A rheostat is connect in series with field rheostat is connect in series with field winding for voltage control (in generators) or speed control (in motors). • Shunt motors give nearly constant speed over a wide range of loads. Motor torque‐speed curve Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 17 Chapter 6: Introduction to Rotating Machines DC Machines Cl ifi i Classification of DC Machines f DC M hi 3) Self‐Excited Series DC machines • Armature current and field current are identical. identical • Series generator gives poor voltage regulation. • Series motors give very high starting torque and high speed when the load is small. Hence, they should not operate under unload condition (ran‐away). • Series motors can be supplied by both DC and AC. It is also called universal motor. Motor torque‐speed curve Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 18 Chapter 6: Introduction to Rotating Machines DC Machines Classification of DC Machines 4) Self‐Excited Compound DC machines •A A compound motor has a series field and a compound motor has a series field and a shunt field. • Wh When a compound motor runs at no‐load, d t t l d armature current and mmf of the series filed are small. It behaves like a shunt motor. • Keywords: short‐shunt connection, long‐ shunt connection • Keywords: cummulative compounding, differential compounding. p g Motor torque‐speed curve Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 19 Chapter 6: Introduction to Rotating Machines DC Machines Characteristics of DC Machines Generator% Motor oo Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 20 Chapter 6: Introduction to Rotating Machines DC Machines Example: A shunt DC motor operating at 1200 rpm is supplied by a 120 volts. The line current is 50 A. The shunt‐field resistance and armature resistance are 100 ohms and 0.2 ohms, respectively Compute respectively. Compute 1) The field current 2) The armature current 3) Induced voltage (back emf) 3) Induced voltage (back emf) 4) The mechanical power (in hp) Further interesting topics •Starting DC machines •Stopping DC machines S i DC hi Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 21 Chapter 6: Introduction to Rotating Machines AC Machines AC Generators AC Motor Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 22 Chapter 6: Introduction to Rotating Machines AC Machines: Synchronous Machines AC Machines: Synchronous Machines • Mechanical speed is proportional to the frequency of the current in to the frequency of the current in the armature. • The The field winding produces a single field winding produces a single pair of magnetic poles. • Armature winding is on the stator A t i di i th t t • Field winding is on the rotor and is excited by dc. Two poles, single phase, synchronous generator Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 23 Chapter 6: Introduction to Rotating Machines AC Machines: Synchronous Machines AC Machines: Synchronous Machines poles Electrical frequency; f e n Hz 120 n is mechanical speed in revolutions per minute (rpm) Four poles, single phase synchronous phase, synchronous generator poles or e m 2 The relation is known as synchronous speed. y p Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 24 Chapter 6: Introduction to Rotating Machines AC Machines: Synchronous Machines AC Machines: Synchronous Machines Salient poles IInstallation for hydroelectric generator t ll ti f h d l t i t which operate at low speeds. Four poles, single phase p , g p Non‐Salient poles or Cylindrical‐rotor. Installation for steam (or gas) turbine generators which operate at high speeds. Two poles, single phase Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 25 Chapter 6: Introduction to Rotating Machines AC Machines: Synchronous Machines AC Machines: Synchronous Machines Salient poles IInstallation for hydroelectric generator t ll ti f h d l t i t which operate at low speeds. Four poles, single phase p , g p Non‐Salient poles or Cylindrical‐rotor. Installation for steam (or gas) turbine generators which operate at high speeds. Two poles, single phase Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 26 Chapter 6: Introduction to Rotating Machines AC AC Machines: Synchronous Machines Machines: Synchronous Machines Four poles, three‐phase Y‐connection generator Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 27 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors • AC appears in both stator and rotor windings. • The stator winding is the same as a synchronous machine. • An external AC source is supplied to the stator windings. • The rotor winding is short‐circuited and has not external connections. • Currents in rotor are induced by transformer action. • The rotor does not rotate synchronously. • The rotational speed of the rotor is less than synchronous speed. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 28 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors Advantage • Induction motors are rugged, inexpensive and easy to maintain. • Induction motors have many size from a few watts up to 10,000 hp. • Induction motors give nearly constant speed. Disadvantage • It is difficult to control speed. • Starting current is peak, five to eight times the full‐load current. • The lagging power factor is low when the motor drives a lightly load. Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 29 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors Rotor Types • A A wound rotor wound rotor carries a poly phase carries a poly phase winding having the same number of poles as the stator. The terminals of th the rotor are connected to insulated t t dt i l t d slip rings mounted on the shaft providing external connection. • A A squirrel‐cage rotor is made from squirrel‐cage rotor is made from conducting bar embedded in slots in the rotor. Hence this type of motor is rugged. t i d Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 30 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 31 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors nslip Slip speed is the difference between the motor speed n and the synchronous speedns speed and the synchronous speed . nslip ns n Recall that f ns 120 (rpm) P It can be verified that ca be e ed a nslip ns n 120 f slip P (rpm) f slip li sf Slip is defined as normalized slip speed. ns n s ns ns nslip nslip sns Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 32 Chapter 6: Introduction to Rotating Machines Example: A 3Φ, 460 V, 100 hp, 60 Hz four‐pole induction motor delivers rated output power a slip 5%. Compute 1) Synchronous speed Synchronous speed 2) Motor speed 3) Frequency of the rotor circuit 4) Slip speed Slip speed Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 33 Chapter 6: Introduction to Rotating Machines AC Machines: Induction Motors AC Machines: Induction Motors Warit Silpsrikul ‐‐ 11‐205 Fundamental of Electrical Engineering‐‐ North Chiang Mai University page 34