Fall9MechDE - Academic Program Pages at Evergreen
advertisement

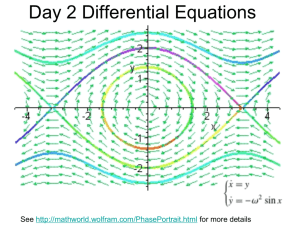
Mathematical Methods of Physics – Fall 2010 – Dr. E.J. Zita Week 9 – Thursday 2 Dec. – last physics day!? DiffEq Ch.3 (repeated and zero eigenvalues, trace-determinant plane) and Mechanics Ch.6 (orbits) Finishing Differential Equations Ch.3, Linear systems Recall behavior of system with eigenvalues : x = Aet Real +: growth real -: decay imaginary : oscillations See table on p.341 for all combinations 3.5: Special cases: Repeated and Zero eigenvalues (p.309) Repeated eigenvalue ( has only one eigenvector V, for the system dY AY . If we know an initial condition, we can apply this to find Y(t=0) = V0. dt Then we can construct a second eigenvector V1 using the method on p.313: V1 = (A – I) V0. Systems with Zero as an Eigenvalue (p.319). No big deal: () is a fine eigenvalue, it just means that the general solution Y k1 e1t V1 k2 e2 t V becomes Y k1 V1 k2 e2 t V ►Choose some problems from p.321 ff 3.6 Second-order diffeq – we already did this 3.7 Trace-determinant plane: You already summarized the different types of behavior for ± real and imaginary eigenvalues. See Table 3.1 p.341. Another way to summarize the behavior of a system is the trace-determinant plane. a b dY AY where A . What is detA = __________= D dt c d Trace of A = sum of diagonal elements = a + d = T Ex: Consider a system Find the characteristic polynomial: det (A - I) = a b c d =_________________ Write this in terms of D and T: p.342 Page 1 of 3 2 T D 0 . Use binomial equation to solve for eigenvalues in terms of T and D: 1 T T 2 4D 2 Complex eigenvalues if 4D T 2 Repeated eigenvalues if T 2 4 D Distinct real eigenvalues if T 2 4 D Trace-Determinant plane: (p.343) Plot T 2 4 D 0 or, equivalently, D T 2 4 , the “repeated-root parabola.” where are roots complex? Where are roots real? Where are roots repeated? ►Group exercise 1: One team for each: discuss among yourselves – describe to class: Where is >0? Where is <0? Where is =0? Describe behavior of system in each region (see Fig 3.47) p.343, Fig. 3.48 p.345 N.B.: This tells us about eigenvalues, not eigenvectors, which must actually be calculated, and which depend on IC. ► Group exercise 2: Harmonic oscillator p.346: One team for each case – discuss with each other, then describe to the class. critically damped underdamped overdamped Mechanics PIQs (AU): Points: The authors of Differential Equations write, “The linearity principle holds for linear systems in all dimensions.” However, it is important to remember that in order for the three solutions of a linear system with three dependent variables to give the general solution, the eigenvectors must be linearly independent, that is, “no [vector] can be in the plane through the origin and the other two.”(p355) Page 2 of 3 We can solve a three variable linear system the same way as a two variable. First find the characteristic polynomial, the eigenvalues and eigenvectors and use them to find the solutions.(p357-359) Insights: On page 366 the authors write that Y1, Y2 and Y3 are linearly independent iff k1=k2=k3=0 is the only solution to k1Y1 + k2Y2 + k3Y3 = (0,0,0). Then the zero vector Y= (0,0,0) cannot be linearly independent with any other vector. While the trace determinant plane gives us a general idea about the behaviour of a system, it does not give a complete description – in order to get a complete description of the system we have to compute the eigenvalues/vectors (345 Diff. Eq.) Questions: In a three variable linear system, at least one eigenvalue is always real. (p361 Diff. Eq.) Why? On page 363 of Differential Equations, figure 3.64 is an example of a saddle with one real eigenvalue and a complex conjugate pair of eigenvalues. How can we tell by looking at the figure that it is a saddle? Mechanics Ch 6: Orbits WORKSHOP: Bohr model of the atom (quantized orbits) PIQs (AU) While all attractive central forces can produce circular orbits, Fowles and Cassiday write that “not all central forces result in stable circular orbits.” The criteria for a stable circular orbit under the influence of an attractive central force is that f(a)+a/3f’(a) < 0 where a is the radius of the orbit and f(a) is the force function. (page 261) Questions: In the homework we showed that, neglecting friction, a particle dropped in a hole bored through the earth will oscillate with the same period as a particle orbiting around the earth just above the surface. What does this mean? Suppose one were to try to use equation 6.13.6 to predict the stability of the classical orbit of an electron around a proton. In that case, would f(a) = kq1q2/r2? Page 3 of 3