500.00Kb - G
advertisement

ON BIFURCATION OF EXTREMALS OF ONE CLASS OF
VARIATIONAL CALCULUS TASKS
AT THE CHOICE OF THE OPTIMUM LAW OF A DYNAMIC SYSTEM’S PARAMETRIC REGULATION
А. А. Ashimov, К. А. Sagadiyev, Yu. V. Borovsky, As. А. Ashimov
(Almaty, Republic of Kazakhstan) e-mail: ashimov@ipic.kz
The research considers bifurcation of one variational calculus task at the choice of optimum
law of parametrical regulation of a dynamic system in an environment of a given final set of algorithms. It suggests the terms of existence of a solution of the specified task of variational calculation, the definition of a bifurcation point, terms of its existence and numerical algorithm of finding
the bifurcation value of a parameter.
Introduction
As is known, the search of effective solutions in a number of areas, including macroeconomics, is being realized in the framework of setting and solving various tasks of the variational calculus. Functionals or functional restrictions, restrictions in a permitted form in these tasks often depend on some parameter [1]. Studies of such tasks require the definition of a bifurcation point, the
terms of its existence and the analysis of a parameter bifurcation value [2].
In recent years, in a number of papers [3, 4, 5, 6] parametrical impacts, which represent the
extremals of relevant variational calculus tasks at the choice of optimal laws of parametric regulation in an environment of the given finite set of algorithms, have been recommended for the effective regulation of the market economy mechanisms. The functionals in the given variational calculus tasks express certain (global, intermediate or tactical) economic development goals. Both the
phase restrictions and restrictions permitted are represented with mathematic models of economic
system from [7]. The mathematic models from an economic system represent the restrictions of variational calculus tasks. The considered mathematic models from [7] contain a number of factors,
and a change of each of them in a certain interval results in the deformation (perturbation) of variational calculus tasks under study.
Currently, the parametrical deformation of the variational calculus tasks is being widely researched. Thus, the parametric perturbation in [1] is used in order to obtain the sufficient extremum
conditions through construction of the corresponding S-functions and usage of the principle of restrictions removal. In [8] the problem of the terms of stability of variations calculus tasks solutions
is set (Ulam’s problem). The studies of this problem are brought to finding the regularity terms under which the functional of perturbation task has the point of a minimum close to the point of a minimum of a non-perturbation task’s functional. In [2] the theorem about the terms of bifurcation point
existence for one variations calculus task is proved. The functional of this task is considered at the
0
Sobolev’s space W pm () (2 p ) and depends on the scalar parameter [0,1] . In [9] the
parametric dependence was considered in problems of space vehicle injection and reentry. It is
shown that almost each local extremal revealed provides a global optimum within a certain range of
parameter values. The change in the type of the global extremal is, as a rule, of bifurcation nature.
Multiplicity of local extremals and significantly nonlinear effects in the behavior of globally optimal solutions are basically caused by the presence of aerodynamic forces, which can be sufficiently
small as compared with the vehicle weight. In [10] generalization of Implicit Function Theorem
1
(IFT) is handled in a parametric linear time-optimal control problem for the account of parametrical dependence’s impact.
Given below are the bifurcation research results under one-parametrical deformation of a
variational calculation task at the choice of the optimum laws of parametrical regulation in an environment of the given finite discrete set of algorithms, the restrictions of which are represented by
phase restrictions and restrictions in the permitted form. These results have not been covered in renowned papers.
1. Bifurcation of one variable calculus task at the choice of the optimum law of parametrical regulation of a dynamic system in an environment of the given final set of algorithms
Let R n be a n-dimensional Euclid space; [t0 , t0 T ] - a fixed interval (time);
x ( x1 , x 2 ,..., x n ) X R n
t [t 0 , t 0 T ] ;
-
a
vector
of
a
state
of
a
system;
u (u1 , u 2 ,..., u l ) W R l - a vector of (regulating) parametrical influences; W, Х – compact sets
with non-empty interiors - Int (W ) and Int ( X ) respectively; [a, b] R (factor); imagings
f f f
,
,
are continuous in X W [a, b] . The studied
f ( x, u, ) : X W [a, b] R n and
x u
variations calculus task is considered on the basis of the following system of the ordinary differential equations, which (the system) is dependent on the parameters (u , ) for the fixed entry conditions x0 Int ( X ) .
Let x (t ) be a solution of the given task (1) at the interval [t0 , t0 T ] under the constant
values u W and
[a, b] . Let x (t ) Int ( X ) . Let us mark the solution
(1) for the selected
u* (u , u ,..., u ) W through x* (t ) . Further u* is fixed.
Let’s mark through the closed set in the space of continuous vector-functions
1
*
2
*
l
*
C n l [t 0 , t 0 T ] , which consists of all the continuous vector-functions x(t ), u(t )
the following restrictions.
dx
f ( x, u , ) , x(t 0 ) x0
dt
that satisfy
(1)
Let us mark through the closed set in the space of continuous vector-functions
C
n l
[t 0 , t 0 T ] , which consists of all the continuous vector- functions x(t ), u(t )
that satisfy
the following restrictions.
x X , u W , x m (t ) x*m (t ) x*m (t ) ,
(2)
t [t0 , t0 T ] , m 1 n, 0 .
Let {F i ( x): i 1 r} and G ( x) 0 be the finite set of continuous for x X real value
F i
are also continuous in X . A choice opportunity of an optimum
x j
parametric regulation law at the level of one parameter u j , j 1 l and in the time interval
[t0 , t0 T ] is investigated in the environment of the following algorithms (rules of control):
functions. All the functions
U
ij
kij F i ( x) u*j , i 1 r, j 1 l .
2
(3)
Here, k ij 0 are adjusted factors. Handling of the law
tem (1) means the substitution of function
Herewith, the rest values of
values u*j1 .
U ij from (3) under the fixed k ij in the sys-
u j U ij in the right parts of the equations of the system.
u j1 , where j1 j, j1 1 l , are considered as constant equals to the
In order to solve system (1) under the usage of the law of control of the
lowing functional (criterion) is considered:
K
U ij type, the fol-
t0 T
G( x (t ))dt .
(4)
t0
Setting of the task of a choice of a dynamic system parametric regulation law in the environment of the finite set of algorithms looks like the following.
To find the law {U ij ,kij } from the set of algorithms (3) under the fixed
provides the supremum of the values of criterion (4) -
K sup
[a, b] , which
(5)
{U ij ,kij }
under the fulfilled conditions (1,2) for the given time interval.
The following lemma has been proved in this paper.
Lemma 1. There is a solution of the task of finding the supremum of K criterion under the
usage of any selected law
U ij from the set of algorithms (3) with the restrictions (1) and (2):
t 0 T
G( x (t ))dt sup .
(6)
{k ij }
t0
Herewith, if the set of possible values of k ij factor of the considered task is limited, then the indicated supremum for the selected law U ij gets obtained. The task (1)-(5) has got the solution for the
finite set of algorithms (3).
Let us suggest the following definition, which characterizes such values of parameter
under which the replacement of one optimal law for another becomes possible.
The definition. The value
task (1)-(5), if under
certain value
,
* [a, b] is called a point of bifurcation of an extremal of
there are as minimum two different laws
U ij
from (3), for which a
K of criterion (4) is optimal.
The following theorem provides sufficient conditions for the existence of a bifurcation
point of the extremals for the considered variations calculus task at the choice of parametrical regulation law in the given finite set of algorithms.
Theorem 1 (about the existence of a bifurcation point). Let for the values of the parameter
1 and 2 , where 1 2 [a, b] task (1)-(5) has the relevant unique solutions for the two
3
different laws U i1 j1 and U i2 j2 from (3). Then there is at least one point of bifurcation
(1 , 2 ) .
The following theorem is a direct sequence of theorem 1.
Theorem 2. Let’s assume that under the value
1 regulation with the help of a cer-
tain law(2) provides the solution for the task (1)-(5), and under 2 , ( 1 2 [a, b] )
regulation through this law does not provide the solution for the task (1)-(4). Then there is at least
one bifurcation point (1 , 2 ) .
Numerical algorithm of finding the bifurcation value of parameter . Let us break the
[1 , 2 ] of possible values of parameter into n equal parts with quite small interval
h (2 1 ) / n . For the received values k a kh, k 0, n an optimal regulation law -
segment
U ik jk
is defined and the first value of k is calculated, under which this law differs from
U i0 j0
at
least in one value of an indexes. In this case the bifurcation point of parameter lays in an interval
*
(k 1 , k ) .
For the found interval the algorithm of defining the bifurcation point with given accuracy
consists in application of the bisection method to the
(k 1 , k ) interval.
This results in finding
the point c (k 1 , k ) , to the left of which U i0 j0 is an optimal law within the limits of deviation from the value с, and to the right this law is not optimal within the deviation limits of
from the value of с. From the theorem 2 it follows that there is the bifurcation point
(c , c ) . These algorithms were used when finding the bifurcation point of an extremal in the next example.
2. Sample of finding the bifurcation point of extremals for one variations calculus
task based on a mathematic models of an economic system
Let us consider a possibility of finding the bifurcation points for one variations task at the
choice of parametric regulation law of the market economy mechanism in an environment of finite
fixed set of algorithms on a mathematic model basis [7] of a country’s economic system. The paper
[3] presents the phase restrictions and restrictions in the permitted form of the researched variations
calculus task at the choice of parametric regulations law by the following relationships:
dM I
M ,
(7)
dt
pb
dQ
(8)
Mf ,
dt
p
dLG
rG LG G n p nL sR L nO (d P d B ) ,
dt
dp
Q
p,
dt
M
Rd RS L
ds s
d
S
max 0,
, R min{ R , R } ,
S
dt
R
4
(9)
(10)
(11)
Lp
dp
1
1
LG ,
(12)
r2 LG ,
(13)
d B r2 LG ,
s
x
1
1 p
(14)
1
R Mx ,
0 0 pMf ,
,
(15)
d
(16)
(17)
G pMf ,
1
f 1 1
x
L
d
(1 n L ) sR ,
1
I
(1 )n p
(1 n )
p
G
(18)
1
1
,
(19)
(20)
(21)
n0 (d B d P ) n p 0 nL (1 nL )n p sR L ( * rG ) Lp ,
0 G L I ,
(22)
L
1
R S P0A exp( p t )
,
.
(23)
pP0 exp( p t )
1
The initial conditions for this system are not mentioned here for the sake of brevity.
Here: M i – total production capacity, Qi – the general stock of the goods in the market; LGi –
total amount of a public debt; p – price levels; s –average real wages; LP - volume of manufacture
debts; d P and d b - enterprise and bank dividends accordingly; R d and R S - supply and demand of a
labor accordingly; , - parameters of function f(x); x - solution of f x s p equation; L and
O - consuming spending of workers and proprietors; I - investment flow; G - consuming government spending; - norm of reservation; - the attitude of average rate of return from commercial activity to the rate of return of the investor; r2 – deposits rate; rG - government bonds rate; 0 factor of proprietors’ propensity to consume; - share of consumption government spending from
the general stock of the goods; n p , n0 , nL - rates of taxes to a flow of payments, dividends and the
workers’ income accordingly; b - norm of a capital intensity of a production capacity unit; - factor of power unit leaving causing by depreciation; * - norm of amortization; - time constant; time constant setting characteristic time scale of process of a wages relaxation; P0 , P0A - initial number of workers and an aggregate number able-bodied accordingly; p >0 - set rate of demographic
growth; – level of material soul consumption in workers’ group.
The model parameters and initial conditions for the differential equations (7)-(11) were obtained on the basis of economic data of the Republic of Kazakhstan at 1996-2000 (r2=0,12;
rG=0,12; β=2; np=0,08; nL=0,12; s=0,1; n0=0,5; μ=μ*=0,012; Δ=1) or are assessed
through the solution of the parametric identification task (ξ=0,1136; π =0,1348; δ=0,3; ν=34;
η0=0,05; b=3,08; α=0,008; Q(0)=125000).
5
After consecutive exception of variable parities in the left parts of the ratios (12) - (23), the
system (7) - (23) will be transformed to the system of five ordinary differential equations, which by
virtue of its huge size is not shown here.
In [3] possibility of a choice of the optimum law of parametrical regulation of type (2) at a
(j = 1) and (j = 2) and on an interval of time [t0 , t0 T ] were
level of one of two parameters
investigated in the environment of the following algorithms.
1)U 1 j (t ) k1 j
3)U 3 j (t ) k 3 j
M M0
const j ,
M0
2)U 2 j (t ) k 2 j
p p0
const j ,
p0
4)U 4 j (t ) k 4 j
M M0
const j ,
M0
p p0
const j .
p0
(24)
const j
M , p0
Here 0
are initial values of the corresponding variables, and
is a value of an appropriate parameter obtained by the results of parametrical identification of a model.
In the considered task the criterion of the (4) type (average GDP for 1997-99 years) was
used.
1
K
T
where
Y Mf
t0 T
Y (t )dt
t0
,
(25)
.
C 7 [t 0 , t 0 T ]
The closed set
in the space of continuous vector-functions of target variables of the system (1) - (23) and regulating parametrical influences is defined by the following ratio
pij (t ) p ** (t ) 0.09 p ** (t ),
( M (t ), Q (t ), LG (t ), p (t ), s (t )) X ,
0 u j a j , i 1,4, j 1,2, t [t 0 , t 0 T ].
a
(26)
p (t )
Here j - is the biggest possible value of j- parameter, ij
are the values of price levels under
*
*
U
the ij regulation law; p (t ) are model (counting) values of price levels without parametrical regulation, X is a compact set of allowable values of the specified parameters.
In the given task of variational calculus its dependence on factor r2 of a mathematical
model was considered, the probable values of which belong to some piece [a, b].
1
We do not consider the case of the unlimited sets H () basing on the economic reasons.
In this case, according to lemma 1 the topside of criterion (25) of tasks (7) - (26) is always
k
achieved for some value of factor ij .
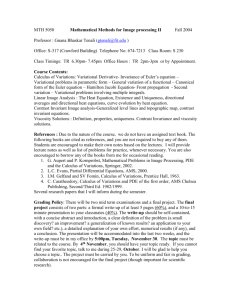
As a result of computing experiment we got the diagrams of dependences of optimum values of criterion K on the rate of interest at the deposits for the given set of algorithms (fig. 1). As it
is seen from fig. 1, the conditions of the theorem 1 are fulfilled, for example, for an interval [15.6,
6
21.6] (in percents), as far as under r2 15 .6 the optimum value of criterion 175467 is reached
through the usage of the U 12 law, and under r2 21 .6 an optimum value of criterion 171309 under usage of another - U 21 law is obtained. The application of the above offered numerical method
allows to define a bifurcation point of the considered task’s extremal - r2* 18.0 with an error up to
0.1 . For this parameter value two laws - U 21 and U 12 are optimal, and the relevant value of criterion K for them is equal to 173381 (mln Tenghe/mon).
Optimal values of a criterion
182000
180000
178000
176000
174000
173381
172000
170000
168000
166000
164000
0
5
10
15
20
25
r2
U21
U41
БезWithout
регулир.
U12
U32
Fig. 1.
3.
Conclusion
We have carried out a research on bifurcations of extremals of one class of variational calculus tasks at the choice of the laws of parametrical regulation of dynamic systems in an environment
of a finite set of algorithms containing adjusted factors.
The fact of existence of the solution of a considered class of variational calculus tasks has
been proved.
The definition of a bifurcation point of extremals is offered; the statement about sufficient
conditions of existence of a bifurcation point of extremals is proved and the numerical algorithm of
detection of a bifurcation value of a parameter for the extremals of the considered class of variational calculus tasks is offered.
The rules of theoretical researches are illustrated with an example of one task of a choice of
the optimum laws of parametrical regulation of the market economy mechanisms in an environment
of the given final set of algorithms.
The results achieved could be recommended for usage under development and realization of
an effective state policy.
The appendix
7
The proof of lemma. The comparison of the relevant target functions and regulating parametrical influences
x (t ), u(t ) of system (1) under its regulation with the help of the law Uij
k
with
U
the value) of factor ij from the ij law sets a continuous display H of some subset of a numerin l
cal half-axis [0,) into the space C [t0 , t0 T ] .
1
A complete prototype H () of the set under the display H is close according to the
theorem of isolation of a complete operand of the closed set under continuous map. The set
1
Hij ()
is not empty, as it contains value
kij 0
. (With
kij 0
x(t ) x* (t ), u(t ) u* obviously satisfies to restrictions (2)).
k H 1 ()
The comparison to the value of factor ij
the solution of system (1) defines a continuous function
from the law
the pair of functions
Uij
of criterion (4) K for
K : H1() [0,) .
Hence, with the chosen law
Uij
the task (1) - (5) is equivalent to the task of definition on the
1
closed set H () of top side of the continuous limited function
y K (kij )
This function is continuous by virtue of the theorem of continuous dependence of the decision of
system of the ordinary differential equations on parameters, and due to limitation of this decision by
virtue of inclusion x X from (2) and continuous dependences of certain integral on a parameter.
Therefore task (1) - (5) for the fixed law
Uij
always has the solution including final optimum value
1
of criterion K . For the limited set H () this value of criterion is achieved under some value of
k*
factor ij (theorem of achievement of the biggest value of a continuous function on a compact). For
*
1
the unlimited set H () , the growing and infinitely large sequence of values of the law
kij
factor
1
from H () can be found, the corresponding values of criterion K for which elements aspire to
K * . Thus, the fact of existence of the solution of a variational calculus task for a case of one law of
parametrical regulation is proved. The fact of existence of the solution of task (1) - (5) follows from
the finality of a set of the probable laws of regulation (3).
The proof of theorem 1. Let's designate an optimum value of criterion K of a task (1) - (5)
for the chosen law of regulation
y K ij ( )
Uij
and value
[a, b]
through
K ij ( )
. The function
[ a, b]
is continuous on
according to the theorem of continuous dependence of the solution of the system of the ordinary differential equations, of continuous dependence of certain integral and, as a whole, by virtue of above proved lemma. Hence, the function
y max K ij ( ) K * ( )
U ij
, giving the solution of the considered task (1) - (5), is also continuous on
[ a, b]
(U ) [ , ]
ij
1 2
a piece
. Let's designate through
set of all those values
*
K ( ) K ( )
which ij
. This set is closed, as a complete prototype of the closed set
8
[1,2 ] , for
{0} for a con-
tinuous function
y K ij ( ) K * ( )
. The set
(Uij )
can be empty as well. As a result the interval
[1,2 ] is represented as the following final combination consisting, as a minimum, from two
closed sets (see provisions of the theorem)
[1, 2 ] (Uij )
Uij
Hence, as far as according to the theorem provisions,
is a boundary point
1 (Ui j )
11
and
2 (Ui j )
11
, there
of the set (Ui1 j1 ) , located in an interval (1 , 2 ) . This point is also
(Uij )
a boundary point of some other set
furcation. The theorem is proved.
and belongs to it; therefore, it is a point of bi-
.
References
1. Ioffe A.D.., Tikhonov V.М. The theory of extreme tasks. M.: Science, 1974.
2. Bobylev N.A.,Emelianov S.V., Korovin S.К. Geometrical methods in variational tasks. M.:
Magistr, 1998.
3. Ashimov A.A., Borovsky Yu.V., Volobuyeva O.P., Ashimov As.A. On the choice of effective laws of parametrical regulation of market economy mechanisms. “Automatics and
telemechanics” journal, № 3, 2005. P. 105-112.
4. Ashimov A., Borovskiy Yu., Ashimov As. Parametrical Regulation of Market Economy
Mechanisms // Proc. 18th International Conference on Systems Engineering ICSEng. 16-18
August, 2005. Las Vegas, Nevada, 2005. P. 189-193.
5. Kulekeev Zh., Borovskiy Yu., Ashimov A., Volobueva O. Methods of the parametrical regulation of market economy mechanisms. Proceedings of the 15th international conference on
systems science. 7-10 September 2004. V. 3. – Wroclaw: OWPW, p. 439-446.
6. Ashimov A., Borovskiy Yu.,Ashimov As. Parametrical Regulation Methods of the Market
Economy Mechanisms. Systems Science. Vol. 35, 2005. No. 1. P. 89-103.
7. Petrov А.А., Pospelov I.G., Shanain А.А. Experience of mathematical modeling of economy.
M.: Energatomizdat, 1996.
8. Ulam S. Unsolved mathematical tasks. M.: Science, 1964.
9. Filatyev A. S. "Paradoxes" of optimal solutions in problems of space vehicle injection and
reentry. Acta Astronautica Volume 47, Issue 1 , 1 July 2000, P. 11-18
10. Kostina E., Kostyukova O. Generalized implicit function theorem and its application to parametric optimal control problems. Journal of Differential Equations. Volume 210, Issue 2 ,
15 March 2005, P. 233-262.
9