Static Friction for round objects gives… rolling without slipping
advertisement

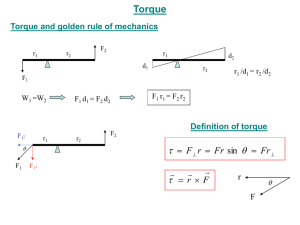
Static Friction for round objects gives… rolling without slipping Step 1: Find the acceleration Analysis: Method 1 …. Energy conservation: Since mechanical energy is conserved for the rolling object, 1 1 KE PE 0 I 2 mv 2 mgy 0 . 2 2 2 For a solid sphere, I mR 2 and for rolling without slipping, v R leading to 5 12 1 2 1 2 1 2 10 10 2 2 2 gy gd sin mR mv mgy mv mv mgy v 25 2 5 2 7 7 So, upon using constant acceleration kinematics, v 2 v02 v v 2ax a 2x 2 2 0 10 gd sin 5 7 g sin 2d 7 Analysis: Method 2 …. Force (more challenging): Here, we look at the free body diagram and also consider the torque… easiest to measure about the center of the rolling sphere. Analysis: Fnet x Fnet y max ma y n mg cos 0 mg sin f s ma n mg cos net I f s r I Note: friction f s r as it is a clockwise torque. a r … the minus sign is since the angular acceleration is negative and the acceleration is positive in the x-direction. 2 Lastly, for a solid sphere, I mr 2 5 Through substitution from our analysis… mg sin f s ma mg sin Hence, mg sin I 2 ma mg sin ma ma . r 5 7 5 ma a g sin 5 7 Rolling without slipping: A Friction Experiment… a 5 g sin 7 Michael Faleski michaelfaleski@delta.edu MIAAPT Fall Meeting 2008 Rolling without Slipping Step 2: Determine the coefficient of friction Use torque and previous result: 2 5 a r friction f s r I s nr mr 2 s nr Solving for the coefficient using the result that a 5 g sin , we have for the solid sphere…. 7 2 2 5 m g sin s mg cos s tan crit 7 5 7 (This question has been asked on previous AP Physics C exams) What if the object is slipping down the incline? What is the acceleration? Analysis: Forces Fnet x max mg sin f k ma Fnet y ma y n mg cos 0 mg sin k n ma n mg cos Through substitution, mg sin k n ma mg sin k mg cos ma leading to the acceleration as a g sin k cos A Friction Experiment… Michael Faleski michaelfaleski@delta.edu MIAAPT Fall Meeting 2008 “Correcting” for ball moving through photogate Assume a distance of X from the first gate and total distance 1.0000 m between gates… Recast the motion into 2 constant acceleration problems… Problem 1: The ball moves down the incline for a distance of X starting from rest. Problem 2: The ball is timed for the known distance that it moves down the incline. Goal: Determine the common acceleration for the two problems x0 x v0 v a 0m X 0 m/s V A t where t M is x0 x v0 X 1.0000 + X V v a A t tM the measured time for the ball by experiment. Mathematical Analysis (constant acceleration kinematics): 2 2 2 Problem 1: v v0 2ax x0 V 0 2 AX (1) 1 1 2 2 x x v t a t 1 . 000 Vt AtM (2) 0 0 M Problem 2: 2 2 Two equations… two unknowns… solve for V first by substituting expression for acceleration from (1) into (2)… result: t M2 2 1V2 2 1.000 Vt M t M V t M V 1.00 0 2 2X 4X A Friction Experiment… Michael Faleski michaelfaleski@delta.edu MIAAPT Fall Meeting 2008 Use the quadratic equation to solve for V: t M2 t M t 4 4X V t M2 2 4 X 2 M 1 2X tM 1 1 1 X 1 1 1 X (Keep the positive root since this assumes that “down the incline” is the positive direction… already assumed in description of position variables (from 0 to X and then from X to 1.0000 + X) V 2X tM V2 2 1 A 1 2 X 1 1 2 And so, 2X X tM (3) For my assumption… X 0.0030 m 1.792 2.0000 A 2 instead of the “uncorrected” A tM t M2 Control X experimentally and Eq. (3) will give the expression to compute the acceleration. A Friction Experiment… Michael Faleski michaelfaleski@delta.edu MIAAPT Fall Meeting 2008