The Gyroscope
advertisement

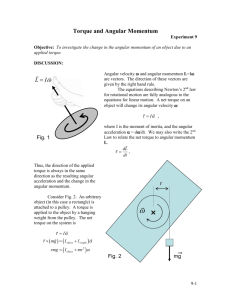
The Gyroscope Introduction A gyroscope is a symmetric rotor, usually accompanied by one or more gimbals that allow it to spin without friction on the surface that it is supported by. This device, when set spinning, has the interesting property that it tends to remains in a fixed orientation in space throughout any application of off-axis torques. The stability of tops has been known since antiquity, but scientific use of the phenomenon did not begin until the late 18th century when sailors began using them for navigation on the rough seas1. The term gyroscope was first used by Leon Foucault in 1852 when he observed that it obeyed the same 24-hour rotational period that his famous pendulum showed1. The gyroscope has since been used for numerous practical applications, and remains a fascinating example of a non-obvious physical effect. Explanation For the purposes of explanation, a standard gyroscope model will be used (as seen in the figure). This consists of a rotor with a surrounding gimbal. The rotor consists of an axle that mounts into the gimbal, and a massive rim that is connected to the axle by spokes. For simplicity, the gyroscope will be located in vacuum with no gravitational field, and all torques will be applied to the gimbal*1. Initially, the rotor is not rotating. A torque that does not cause the gimbal to spin around the rotor will be called a longitudinal torque, because if the rim were the equator, the corresponding force would be along a line of longitude. We will only be concerned with longitudinal torques because the other component of any torque will simply cause a rotation of the gimbal, which is always trivially explained. In this state where the rotor is not rotating, the application of a longitudinal torque results in the standard behavior of any rigid body, i.e. the gyroscope rotates with an angular frequency determined by the rotational impulse divided by the moment of inertia. 1 This may seem like it loses too much generality, but gravity is just an acceleration by general relativity, so the torque on the C.M. from gravity can be equivalently modeled as a torque on the gimbal about the C.M. Now let the rotor be set spinning with an appreciable angular frequency. If a longitudinal torque is applied, the special properties of the gyroscope can now be witnessed. There are two properties that distinguish the gyroscope from other mechanical devices. These are its stability and the phenomenon of precession. Stability Before proceeding with an analysis of stability, an observation is needed. If one spins a mass on a rope, it can be observed that the mass rises until the rope is roughly vertical. This is a result of a vertical component in the centripetal force, which is actually the tension of the rope. The horizontal component of the centripetal force provides the radial acceleration needed to keep the mass rotating rather than flying off tangentially, but the vertical component is left to pull the mass upwards so that it rotates with maximal radius (see larger circle in diagram). For the case of a circular spinning object, as in the rotor for a gyroscope, the effect of the vertical component of the centripetal acceleration is to make the plane of rotation tend toward being perpendicular to the axle that it is mounted to. To determine if the centripetal force’s vertical component is large enough to be considered, we will calculate a simple example. Say we have a toy gyroscope with rim radius of 3cm and rim mass of 0.2kg. A high quality toy gyroscope rotates at around 200Hz2 so we will let the angular frequency be ω=2πf=1257r/s. The centripetal tension is mv2/r = m(ωr) 2/r = mω2r = 9480 N. This is clearly a significant force, requiring sturdy spokes. However, we are concerned with the vertical component of this, which is mω2r*sin(θ) where θ is the angular deflection of a point on the rim from the horizontal. We do not know what the magnitude of the angular deflection is, but we may calculate what it would be for a torque that would support its own weight on the earth. Both torques are acting at the radius of the balancing point, so we need only concern ourselves with the magnitude of the force. The gravitational force will be mg = 0.2*9.8 = 1.96 and equating this to the vertical component of the centripetal force gives 1.96=9480sin(θ) or sin(θ)=2.07*10-4. The vertical displacement of a point on the rim is then r*sin(θ) = 0.03*2.07*10-4 m = 6.2 μm. This bending of the rotor is of a small enough magnitude that it is reasonable to accept. Now lets say that a brief, longitudinal torque is applied to the gimbal. The gimbal will transmit the torque to the axle through the bearings. Then it is the responsibility of the spokes to communicate the change in orientation to the rim. The only force in the spokes is their tension, which is derived from two factors: the rigidity of the spokes, and the tension due to the centripetal force. The rigidity tension is always present after a torque, and it is always the same in magnitude regardless of the angular momentum of the rotor. This tension serves to notify the gimbal of the moment of inertia of the rotor contained within. These two tensions only act for the short amount of time*2 that it takes for the rim to adjust back to being perpendicular to the axle. We are only concerned with the centripetal tension, which is dependent on angular frequency. Observe the effect of the vertical component of the centripetal tensions in the diagram to the left. Each is causing the rim to be torqued in the same direction as the applied torque. However, since Newton’s Third Law of Motion says that every action has an equal and opposite reaction, the rim is also applying an opposite torque onto the axle and gimbal. This counter-torque is gyroscopic resistance and is responsible for the stability of the gyroscope. *3 Another way of looking at this is to ignore the mass of the rim in computing the moment of inertia of the gyroscope, and take it into account manually. Then we see that since the rigidity tension is how we account for the mass of the rim, and the centripetal tension is additive with the rigidity tension, 2 If the spokes are infinitely rigid, the force will have no time to act. But luckily this pathological case is impossible because an infinitely rigid object would have to communicate faster than the speed of light. 3 If the rim is a continuous circle, it may be able to provide its own centripetal force. In this case, the spokes will not be acting, but the rim itself will be creating the same gyroscopic effect with its centripetal force. it will appear that the moment of inertia is larger than when there was no rotation. This is consistent with the fact that it takes a larger longitudinal torque to rotate the gyroscope. Precession At this point, it is possible to use the principles of the explanation to derive another property of the gyroscope’s behavior. If a sudden force is delivered to the gyroscope that creates a longitudinal torque, a point on the rim will undergo an acceleration, and each point will be left with a new velocity that has a component that is not in the plane of rotation. This component of its velocity, which was added by the sudden force, will cause a vertical displacement and will activate the centripetal factor. The angle of any rim-point from horizontal will be given by where v is the vertical component of the point’s velocity. We know that v will be diminished by the opposing centripetal force as according to (by substituting for theta) (by differentiating both sides) (after applying condition v(0)=v0) This equation tells us that the centripetal force is of exactly the right form to cause a point on the rim to oscillate vertically at the same frequency as the rotation. If we watch the point through time, we will find that v will reach 0 velocity at 90 degrees from the point it was at when the sudden force was applied. Then it will have the opposite velocity, and then be again diminished, reaching 0 velocity again at 270 degrees. Remember that the oscillations are happening very fast because ω is large, so they are very small in actual displacement. The formula implies that from 0 to 180 degrees (the gray region in the diagram), the vertical velocity is decreasing, and from 180 to 360 degrees, the vertical velocity is increasing. Before arriving at this formula, it was unclear how the spinning affected the distribution of the centripetal torques around the rim. But now we see that in order for these changes in vertical velocity to take place, the vertical component of the centripetal force must be acting. In the region from 0 to 180 degrees, since the rim is being forced to have decreasing upward velocity, the centripetal force is pushing it downwards. The other side is being forced upwards, so the two forces create a net centripetal torque on the rim in the perpendicular longitudinal direction. *4 And the force that will be felt by the gimbal will be the same torque in the opposite direction. That is, the gimbal will feel a torque that will make the top of the axle go into the paper. This transfer of the applied force to its perpendicular results in the phenomenon of precession. As soon as the applied torque is gone, the axle will quickly stabilize to the new orientation of the rotor, so precession will stop. This fact that a torque is required to sustain precession is the first law of gyrodynamics.3 Commentary We have seen that the centripetal force is responsible for the gyroscopic properties of stability and precession. In the case of stability, it was the 4 The addition of other masses on the rim does not change the situation because the opposite side has opposite velocity, but contributes additively to the centripetal torque since it is coming from the other side. instantaneous vertical displacements that were creating a centripetal torque. In the case of precession, it was the instantaneous vertical velocities that were creating a centripetal torque. In this system, like many others in physics, the positions and velocities are out of phase by 90 degrees. This is why the two properties act perpendicular to one another. Despite their differing directions, they are both still caused by the same set of forces, so in this sense they are linked. This linkage extends to the magnitudes of the respective torques, and also to causality. To explain these concepts, we will now turn to the more powerful conservation laws. The fact that the magnitudes are the same is a simple result of conservation of energy. Assuming no friction in the bearings, there is no tangential torque on the rotor since the centripetal force is always radial, so the rotor always spins at the same angular frequency. Therefore, any work done onto the gimbal must go directly into motion of the whole device. The preceding explanation shows that the force will go into precession, so all the resistance encountered over a distance will be exactly matched by the precessional motion. We can calculate the magnitude of this resistance using conservation of angular momentum. Consider two angular frequency vectors for the rotor, one initial, and one after an infinitesimal rotation. The magnitude of the difference will be the length of vector that connects the ends of them. This length is ω*sin(dθ). Therefore, the torque needed to sustain a rotation is: where Θ is the angular frequency of the new rotation and I is the moment of inertia of the rotor about its normal spin axis. This relation is the second law of gyrodynamics.3 The causality of gyroscopic resistance (stability) and precession is also linked in the sense that if one is neutralized, the other will act as though it too were neutralized. If the gimbals are fixed so as to prevent precession, the gyroscope will rotate in response to a longitudinal torque just as freely as if it were not spinning at all.4 Since the same set of centripetal forces creates both effects, a counter to one is automatically transmitted back to the other through the same mechanism that created them in the first place. Works Cited 1 2 3 4 http://einstein.stanford.edu/content/education/EducatorsGuide/Page30.html http://www.gyroscope.com Applied Gyrodynamics – Ervin S. Ferry Gyrostatics and Rotational Motion – Andrew Gray Works Consulted 1 2 Spinning Tops and Gyroscopic Motion – Harold Crabtree The Gyroscopic Compass – A.L. Rawlings