PHY131H1S
Practicals Manual
Department of
Physics
University of
Toronto
January to April, 2009
Welcome to the Physics Practicals! We have devised a number of Activities and Projects
which will help you to learn a lot of Physics. They will also help you to do well on the
tests and exam of the course. We are very excited about this new way of helping you to
learn Physics, and hope you find your time in the Practicals to be fun and productive.
The course web-site has the most up-to-date contact information, handouts, schedules and
information:
http://www.physics.utoronto.ca/~jharlow/teaching/phy131s09
The course coordinator and lecturer is
Jason Harlow, Office: MP129-A, Phone 416-946-4071.
The materials in this book were mainly developed by
David Harrison, Office: MP121-B, Phone 416-978-2977
The co-coordinator of the course is
Pierre Savaria, Office: MP129-E, Phone 416-978-4135.
The course administrator is April Seeley, Office: MP129-E, Phone 416-946-0531.
Email addresses are listed on the course web-site and on the Physics Department
directory at http://www.physics.utoronto.ca/people .
Course staff will endeavour to respond to email inquiries from students within 2 days. If
you do not receive a reply within this period, please resubmit your question(s) and/or
phone (leave a message if necessary). Please note that some servers (such as hotmail)
can be unreliable in both sending and receiving messages.
Table of Contents
Section
Introduction
Mechanics Module 1
Scientific Method Module
Mechanics Module 2
Mechanics Module 3
Mechanics Module 4
Teamwork Module
Mechanics Module 5
Mechanics Module 6
Oscillations Module
Numerical Approximation Module
Fluids Module
PHY131 Practicals Manual
Page
1
7
15
17
28
37
42
50
59
69
85
94
Introduction
2
Schedule (preliminary)
Students will meet once per week in MP126-P on Thursdays or Fridays for two hours.
Practical
Session #
Topics, Activities
Dates
Schedule is Subject to Change
Jan 8, 9
NO PRACTICALS THIS WEEK
Jan 15, 16
Introduction
Mechanics Module 1
2
Jan 22, 23
Error Analysis Assignment due
Scientific Method Module
Mechanics Module 1 continued
Mechanics Module 2
3
Jan 29, 30
Written Homework #1 due
Mechanics Modules 2 continued
4
Feb 5, 6
Mechanics Module 3
Feb 12, 13
NO PRACTICALS THIS WEEK – Extra office hours for test
prep.
1
Feb 19, 20 Reading week. Then test on Feb.24 evening.
5
Scrambling teams
Feb 26, 27 Teamwork module
Numerical Approximation Module
6
Mar 5, 6
7
Mar 12, 13 Mechanics Module 5
8
Mar 19, 20
9
Mar 26, 27 Oscillations Module
10
Apr 2, 3
Mechanics Module 4
Written Homework #2 due
Mechanics Module 6
Fluids Module
The Error Analysis Assignment is a series of online tutorials which must be viewed
with a computer. There is a link from the Practicals tab of the main course web page.
PHY131 should please write the answers on a paper print-out of the 3-page “Answer
Sheet”, which is linked as a PDF on the first page of the assignment. The answers, done
by individual students, are due in the 2nd practicals session.
PHY131 Practicals Manual
Introduction
3
How the Practicals Work
You will be meeting for 2 hours every week in room MP126P, which is in the back of
MP126. Each Group will have a maximum of 36 students. You will be working in a
Team with up to three of your classmates. There will be two Teaching Assistant
Instructors present for each Practical.
Your Team will keep a single lab book, which is to be a complete record of everything
you did, what you and your teammates thought it meant, and what conclusions you have
drawn from your work.
Each Practical session will include time for student questions and discussion. However
the “heart” of the Practicals will be a series of Activities.
Every week you will be doing Activities based on the material currently being discussed
in class. Often the Activities will be based on material that has already been discussed in
class, but sometimes the Activities may be used to introduce material that has not yet
been talking about in class. In addition, you will be doing three “value added” Modules,
that we believe are important for your overall learning about science in general and
Physics in particular. These are:
A Module on the Scientific Method
A Module on effective Teamwork
A Module on Numerical Approximation
For each Practical session two members of each Team will serve the following roles:
Facilitator. This person, a different individual each week, is responsible for keeping
the Team on track with the Activities. When the entire Practical group discusses
some topic, the Facilitator will be the Team’s primary spokesperson.
Recorder. This person, also a different individual each week, takes primary
responsibility for recording all work, speculations, conclusions etc. in the lab
notebook.
Evaluation and Marks
The Practicals will count for 20% of your mark in PHY131.
All marks will be given on an integer scale from 0 to 4:
0. Missing work.
1. Seriously deficient.
2. Requires improvement.
3. The standard mark indicating good work
4. Exceptional. We will be very stingy in awarding marks of 4.
Each mark component has a weight, and the mark times the weight will be added to
generate a Practical mark. The total number of weights of all components is 20. The one
exception to this marking system is the Error Analysis Assignment. It is marked out of
100.
PHY131 Practicals Manual
Introduction
4
Attendance at the Practical is vital for your learning. We will deduct the cube of the
number of un-excused absences from the final Practical mark.
Here are the components and their weights:
1. Notebook Mark 1 (0 Weights). After the first Practical the lab books will be
collected and marked. However, this mark will not count towards your Practical
mark. Instead it is intended to make our standards and requirements clear to you.
2. Error Analysis Assignment (1 Weight). You will do this assignment
individually. It is due at Practical Session #2.
3. Scientific Method Module (1 Weight). This Module will be done during the
second practical, and will be marked.
4. Written Homework #1 (2.5 Weights). You will do this assignment outside of
class in collaboration with the members of your first Practicals team. It is due at
Practical Session #3.
5. Notebook Mark 2 (6 Weights). After the last Practical before Test, a selection of
Activities from Practical sessions completed so far will be chosen to be marked.
The decision of which Activities will be marked will be chosen more-or-less
randomly after the books have been collected. All Teams will have the same
Activities marked.
6. Numerical Approximation Module (1 Weight).
7. Written Homework #2 (2.5 Weights). You will do this assignment outside of
class in collaboration with the members of your second Practicals team. It is due
at Practical Session #8.
8. Notebook Mark 3 (6 Weights). At the end of the term a selection of the
Mechanics, Oscillations and Fluids Activities you have done since the Test will be
chosen to be marked. The decision of which Activities will be marked will be
chosen more or less randomly after the books have been collected. All Teams will
have the same Activities marked.
Computers and Networks
The Practical server is: feynman.physics.utoronto.ca. You will access the server using
your UTORid and password. You will have access to three folders on this server:
Your home directory. You have read and write privileges for this directory.
Your team directory. All members of your team have read and write privileges here.
public. This is an area of the server containing documents, computer programs, etc.
Everyone has read privileges for this directory.
Note: you should never save work on the local PC. These discs will be ruthlessly purged
on a regular basis.
Remote Access
You may access the server at: https://feynman.physics.utoronto.ca. You may upload and
download files from your computer to the server.
PHY131 Practicals Manual
Introduction
5
Printing
There is a colour printer in the Practical Room. You may choose to print either in colour
or black and white by choosing the appropriate printer in the print dialog. We charge for
printing using your TCard. We charge:
10 cents per page for black and white printing.
15 cents per page of colour printing.
We do not (yet) have facilities in the building to add dollar values to your card. The
locations of cash-to-card locations is at:
http://content.library.utoronto.ca/finance-admin/photo/cash-to-card
At present the nearest location is the Main Floor of the Earth Science building, just across
Huron Street.
Datasets
All datasets in the Practicals have a standard uniform format. This section describes that
format.
The dataset file is text.
1 The first line of the file is the title of the dataset.
2 The second line of the file names the variables of the data. The names are
separated by tabs. In the examples below we represent a tab with: <TAB>
3 The third and subsequent lines of the file contain the data. Each datapoint is on a
separate line and the values are separated by tabs.
Thus, the dataset can be edited with a text editor or a spreadsheet program such as Excel.
There are four cases for the number of variables in the dataset.
One Variable
If only one value is given for each datapoint, it is the dependent (i.e. y) variable. In this
case the values of the independent (x) variable are assumed to be 1, 2, 3, … in order.
Here is an example of such a dataset:
Balonium decay values
Counts per second
50
32
27
15
11
8
PHY131 Practicals Manual
Introduction
6
Two Variables
In this case the first column contains the values for the independent (x) variable and the
second column the values for the dependent (y) variables. For example:
Student collected data on pressure-temperature values
Pressure (cm Hg)<TAB>Temperature (C)
65<TAB>-10
75<TAB>17
86<TAB>42
In the above <TAB> denotes the TAB character.
Three Variables
If there are three variables, the third one is the error in the dependent (y) variable.
Thermocouple calibration data
Temp (C)<TAB>Voltage (Volts)<TAB>errV
0<TAB>-0.89<TAB>0.05
5<TAB>-0.69<TAB>0.05
10<TAB>-0.53<TAB>0.05
Four Variables
Now there are explicit errors in both coordinates of the data. The first column contains
the name and values of the independent (x) variable, the second column contains the
name and values of the error in the independent variable, the third column contains the
name and values of the dependent (y) variable and the fourth column the name and values
of the error in the dependent variable.
Pearson’s Data with York’s Weights
X<TAB>errX<TAB>Y<TAB>errY
0<TAB>0.0316<TAB>5.9<TAB>1
0.9<TAB>0.0316<TAB>5.4<TAB>0.746
1.8<TAB>0.0447<TAB>4.4<TAB>0.5
PHY131 Practicals Manual
Introduction
7
Mechanics Module 1
Student Guide
Concepts of this Module
Scaling
Dimensions
Fermi Problems
Introduction to Experimental Uncertainties
Kinematics in One Dimension
Motion Diagrams
Setting up Newtonian Dynamics
The Activities
Activity 1
A sculptor is making a statue of a duck. She first creates a model. To make the model
requires exactly 2 kg of bronze. The final statue will be 5 times the size of the model in
all three dimensions. How much bronze, in kg, will she require to cast the final statue?
You may find it helpful to think about the model being constructed of Lego blocks, with
the final statue made of Lego blocks that are 5 times the size in each dimension as the
ones used to make the model.
Activity 2
When the sculptor finished making her model of the duck statue, she gave it 2 coats of
varnish. This took exactly one can of varnish. How many cans of varnish will she need to
give the final statue 2 coats of varnish?
Activity 3
Surprisingly, the units of all physical quantities can be defined in terms of combinations
of only four fundamental units: a unit for length, mass, time, and electric current. In the
SI system the units are:
PHY131 Practicals Manual
Mechanics Module 1
8
Second, s: the time required for 9,192,631,770 oscillations of the radio wave
absorbed by the cesium-133 atom.
Meter, m: the distance traveled by light in a vacuum in 1/299,792,458 of a second.
Kilogram, kg: the mass of the international standard kilogram, a polished
platinum-iridium cylinder stored in Paris.
Ampere, A: the constant current which, if maintained in two straight parallel
conductors of infinite length, of negligible circular cross-section, and placed 1 m
apart in vacuum, would produce between these conductors a force equal to
2 x 10-7 newton per meter of length.
Mort the politician has a not-so bright idea that we could save money by simplifying the
standards for units. Instead of having a unit of length be fundamental, the politician
suggests having a unit of volume as fundamental. Of course this unit of volume would be
called a mort. Then, instead of a difficult to measure and expensive separate standard for
length we could define the volume of the standard kilogram to be exactly 1 mort.
In this system of units, what is the unit of density?
What is the density of the standard kilogram in kg/mort?
The density of the standard kilogram is about 21,500 kg/m3. The density of water is
1000 kg/m3. What is the density of water in kg/mort?
In this system of units length is now a derived quantity. What is its relation to the
mort?
You have a replica of the standard kilogram and an object of unknown material with a
similar volume. How might you actually measure the volume of this object to
determine if its volume is greater than, less than, or equal to one mort?
Activity 4
The ancient Greeks built a temple to Apollo on the island of Delos. It was 11 m wide, 24
m long, and 10 m high. In 427 B.C. a plague ravaged Athens, and the Athenians
consulted the oracle on Delos, who demanded that they double the size of the temple.
(a) What is the original volume of the temple?
(b) The Athenians re-built the temple by doubling the size of each dimension of the
temple. What was the volume of the new temple?
(c) The Athenians consulted to oracle again, who said “You have not doubled the size
of god’s temple, as he demanded of you.” What mistake did the Athenians make?
(d) What would be the dimensions of the temple that the oracle wanted the Greeks to
build?
PHY131 Practicals Manual
Mechanics Module 1
9
Activity 5
How many musical notes are played on an average radio station in a given year?
Activity 6
A useful visualization technique in studying motion is called a motion diagram. We will
be using these diagrams frequently in this course.
For example, consider an apple that is dropped from rest at some height above the
ground.
For many objects in translational motion we can ignore the details of the object
itself and model the object as an ideal particle and draw it as a simple dot. We
number each dot to show the order in which the apple was at the positions
indicated. The same amount of time elapses between each dot and the next one.
The figure to the right shows the motion diagram for the apple in free fall.
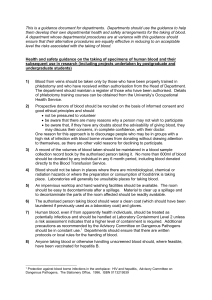
Four motion diagrams are shown below. One is of a car moving to the right at constant
speed, one is of a car moving to the left at constant speed, one is a car accelerating to the
right away from a stop light that has just turned green, and one is a car moving to the
right and slowing down as it approaches a stop sign. Which motion diagram corresponds
to which case?
PHY131 Practicals Manual
Mechanics Module 1
10
Activity 7
If a motion diagram represents the position of an object every second, then the
distance between each dot and the next is numerically equal to the average speed
of the object during that one second interval. For the motion diagrams of Activity
6, draw a line from each dot to the next representing the magnitudes of these
speeds. Put an arrowhead on each line indicating the direction of the motion.
Imagine that two of the dots in the motion diagram are separated by 0.15m. If the
second dot is the position of the object 1.0 second after the position of dot 1, what
is the average speed of the object during this one second interval?
Imagine that the two dots of Part B, 0.15 m apart, represent the positions of the
objects for a time interval of 0.50 seconds. Now what is the average speed of the
object during the half-second interval?
In Part A you “connected to dots” of the motion diagram. If the motion diagram
represents the position of the object every millisecond, what is the relationship
between the length of the line from each dot to the next and the average speed of
the object during that millisecond?
Activity 8
Here are some made up data for the x component of the position of an object at various
times:
Time (s)
0.00
0.10
0.20
0.30
0.40
0.50
0.60
Position (m)
0.002
0.111
0.385
0.892
1.613
2.501
3.612
Sketch a graph of position vs. time. . Make the horizontal axis the time and the
vertical axis the position.
Is it reasonable to “connect the dots” with a smooth line in the graph you sketched? If
yes, what assumption is being made about the motion of the object? If no, why?
Sketch a motion diagram of the motion of the object.
Calculate the displacements of the object for each 0.1 s interval.
How does the number of displacements you calculated compare to the number to the
number of data points in the position-time data?
PHY131 Practicals Manual
Mechanics Module 1
11
From Part D, calculate the x components of the average velocities of the object for
each 0.1 s interval.
Consider the first of the average velocity values from Part F. At what time does the
object have this value of the average speed? Is the value of the time a single value
or a range of values? Why?
Sketch a graph of the average velocity versus time. Make the time the horizontal axis.
From your result from Part F calculate the x component of the average acceleration of
the object for each 0.1 s interval. How does the number of calculated values of the
average acceleration compare t the number of data points in the position-time
data?
Sketch a graph of the average acceleration versus time. Make the time the horizontal
axis.
What does the data indicate about the acceleration of the object?
Activity 9
Imagine that the data from Activity 8 were taken with a computerized data acquisition
system. The system has nearly perfect accuracy, but the precision of each distance
measurement is ± 0.020 m. What are the corresponding uncertainties in the calculated
values of the displacements, velocities, and accelerations/
Activity 10
An experiment to determine whether Energizer or Duracell batteries last longer could
measure the number of hours two AA batteries from each brand will run a tape player.
Here is some made up data:
Duracell
(hours)
Energizer
(hours)
Trial 1
11.4
Trial 2
12.2
Trial 3
7.8
Trial 4
5.3
Trial 5
10.3
Average
9.4
11.6
7.0
10.6
11.9
9.0
10.0
A. From the data, what brand of battery would you choose for your tape player?
B. Why do you think there is such a large variation for the different trials of the same
brand of battery?
PHY131 Practicals Manual
Mechanics Module 1
12
Preparing for Activities 11 - 13
The next few Activities will involve a Track and Collision Cart. The Track should be
leveled, but you should check to make sure.
1. Push the Cart and let it run up and down the Track a few times to warm up the
bearings in its wheels.
2. Place the Cart near one end of the Track and give it a very gentle push. It should
drift a few centimeters and stop. Give the Cart a very gentle push in the opposite
direction: it should drift a few centimeters and stop. If the Cart has a tendency to
stop and reverse its direction then the Track needs leveling.
The feet under the Track are adjustable by loosening the lock nut and rotating the feet. Be
sure to tighten the lock nut when you have the Track level. The Instructors have a level,
which may help. The level will be required if you suspect that the Track is not level along
the axis perpendicular to its length.
Please do not adjust the positions where the feet are mounted on the Track.
Note that although the Carts have low friction, the fact that they do slow down and stop
means the friction is not zero.
At this time, you will find it convenient to measure and record the distance between the
feet. The mounts for the feet provide a convenient way to do this. Estimate the position of
one of the mounts with the scale mounted on the Track and the corresponding position of
the other mount.
You will notice that there is a Cart Launcher mounted on one end of the Track. When the
Launcher is used the Track tends to recoil. Thus the bracket for the feet closest to the
Launcher is braced with double-rod assembly connected fixed to the tabletop with two
table clamps.
You are provided with a set of blocks which will be placed under the feet tilt the Track.
There are blocks that are 1.000 cm, 0.500 cm, and 0.100 cm thick. In addition, for one of
the Activities you will need finer adjustments than these blocks provide. It turns out that
good quality playing cards are carefully controlled in all their dimensions, and are
typically 0.029 cm thick. You are provided a deck of playing cards with the card
thickness written on the box.
PHY131 Practicals Manual
Mechanics Module 1
13
Activity 11
A Cart Launcher is mounted on one end of the Track. Raise the other end of the Track by
raising the feet 3.000 cm. The Launcher may be cocked by pulling back the horizontal
rod until the disc mounted on it latches to the “finger” on the base. Cock the Launcher
and place the Cart against it. Fire the launcher.
You want the Cart to travel almost but not quite all the way up the Track. You want the
highest position to be at least a few cm away from the magnetic bumper mounted on the
far end of the Track, so the cart does not interact with the bumper. You may need to
adjust the Launcher to achieve this. There is a disc mounted on the rod that pushes the
Cart whose position can be adjusted to get the desired force.
Sketch a motion diagram of the movement of the Cart up the Track from a moment
after it leaves the launcher until it comes to rest. It should have some resemblance
to one of the motion diagrams of Activity 6.
Roughly, what is the time between each successive dot of Part A?
Remember that best laboratory practice is to record everything. The Launcher includes a
scale that reads how far the spring has been compressed when it is cocked. You should
record this value.
Activity 12
This Activity uses the same setup as Activity 11.
Note and record the position of the Cart as measured by the scale on the Track when it is
resting against the Launcher when it is not cocked.
A. Launch the Cart and note the position on the scale of the Track where the Cart is
at its maximum distance. Repeat a few times, recording each position. Are the
values exactly the same for each launch?
B. What are all the reasons you can think of to explain why the positions are not
exactly repeatable? The manufacturer of the Launcher says it will launch the cart
“with the same force each time.” Is this statement correct?
C. How can you quantitatively characterize the spread in values of the positions that
you measured?
PHY131 Practicals Manual
Mechanics Module 1
14
D. Is it possible to have an apparatus similar to this one for which the positions
would be exactly the same each time?
E. What is the mean, i.e. average, value of the positions you measured? What is the
mean value of the total distance the Cart travels up the Track between launch and
momentarily coming to rest at the top of the Track?
Activity 13
Now raise the feet on the end of the Track opposite the Launcher by 3.500 cm. Measure
the distance the Cart travels up the Track. Although you may do a careful measurement
like you did in Activity 12, just estimating the position of the Cart at its greatest distance
to the nearest centimeter will be sufficient. Remember to keep the end of the Track with
the Launcher against the U-shaped rod to minimize rebound.
A. The total distance the Cart travels is less than in Activity 11. So the angle of the
Track and the distance the Cart travels are both different. Is anything the same? If
so, what?
B. It is unlikely that your answer to Part A came out numerically perfect. What are
all the reasons you can think of to account for the small variation from perfection?
This Guide was written in May, 2007 by David M. Harrison, Dept. of Physics, Univ. of Toronto. Activity
10 is from R.L. Kung, Am. J. Phys. 73 (8), 771 – 777 (2005).
Last revision: September 25, 2008.
PHY131 Practicals Manual
Mechanics Module 1
15
Scientific Method Module
Student Guide.
“God is subtle but he is not malicious.”
-- Einstein
The Scientific Method is a set of techniques and assumptions used to try to discover the
organizing principles of the physical universe. In this Module, we will explore the
method using a “universe” of a set of playing cards.
Here your Instructor will present cards from a deck to you; your task will be to figure out
what ‘law’, if any, controls the pattern by testing hypotheses (i.e. through conjecture and
refutation).
The basis of the Scientific Method is that one must be prepared to “dare to be wrong.” If
we are not prepared to be wrong, then we are not able to increase our understanding.
A. List five different patterns that might be true for the cards in the deck. These
should be possible general patterns, not predictions of what the next card might
be. For each pattern, list what cards would support the hypothesis and what cards
would falsify the hypothesis.
B. It is likely that in Part A you made one or more assumptions about that nature of
the “universe” of the deck of cards. These could be:
The deck contains four suits: clubs, diamonds, hearts and spades.
The deck contains aces, cards numbered between 2 and 10, plus jacks,
queens and kings.
There are 52 different cards in the deck.
Etc.
Identify as many of those assumptions that you have made as possible.
C. Your Instructor will show you the first three cards of the deck. For the patterns of
Part A:
Which have been proven to be correct?
Which have been proven to be incorrect?
Which have not been proven to be either correct or incorrect?
Have any of your patterns been proven to be correct? What would be necessary
for a pattern to be proven to be correct? If all of your patterns have been proven to
be incorrect, try to choose two or more patterns that might be true for the cards of
the deck based on the three cards that you can see.
D. Your Instructor will show you the next three cards of the deck. For the patterns
not proven to be incorrect in Part C:
Which have now been proven to be correct?
Which have now been proven to be incorrect?
Which have not been proven to be either correct or incorrect?
PHY131 Practicals Manual
Scientific Method Module
16
E. Can you now say what the pattern of the cards in the deck is? What would be
necessary for you to be 100% sure that you know what the pattern is?
This Student Guide was written by David M. Harrison, Dept, of Physics, Univ. of Toronto, in August 2008.
It is based on materials developed by Allen Journet, Dept. of Biology, Southeast Missouri State University,
http://cstl-csm.semo.edu/journet/BS107/LabManual/BS107-LAB3%20F2008.pdf.
Last revision: September 25, 2008.
PHY131 Practicals Manual
Scientific Method Module
17
Mechanics Module 2
Student Guide
Concepts of this Module
Vectors
Relative Speeds
Newton’s First and Second Laws
The Activities
Activity 1
If we subtract a vector A from itself, there are at least two ways to write the result:
1. A A 0
2. A A 0
The right hand side of the first form is a vector, while the right hand side of the second
form is not. Which form is correct, 1 or 2? Why?
Activity 2
Here are two position vectors, A and B .
Vector A has a magnitude of 5.0 cm and makes an angle of 30 degrees with the vertical
as shown. Vector B has a magnitude of 7.5 cm and makes an angle of 45 degrees with the
vertical as shown.
PHY131 Practicals Manual
Mechanics Module 2
18
Sketch the two vectors as shown onto the graph paper in your Lab Notebook. Note that
sketch means a rough version: draftsman-like precision is not required. Leave at least 5
cm space around the sketch in all directions.
A. In the Notebook sketch and label the sum A B
B. On the same sketch draw and label the sum B A . Compare your result to Part A.
C. Sketch the two vectors into your Lab Notebook again. Leave at least 5 cm of
space around the sketch in all directions. Draw and label the difference A B .
D. On the same sketch as Part C, draw and label the difference B A . Compare your
results to Part C.
A simple little Flash animation illustrating addition of two vectors is available at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/Vectors/Add2Vectors.html
There is also an animation of subtracting two vectors at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/Vectors/Subtract2Vectors.html
Activity 3
Here are three position vectors A , B and C . A and B are the same vectors as in
Activity 2. Vector C has a magnitude of 7.0 cm at makes an angle of 30 degrees with the
horizontal as shown.
Sketch the three vectors as shown into your Lab Notebook. Leave at least 5 cm space
around the sketch in all directions.
PHY131 Practicals Manual
Mechanics Module 2
19
A. In the Notebook sketch and label the sum ( A B ) C .
B. On the same sketch draw and label the sum A ( B C ) . Compare your result to
Part A
A Flash animation illustrating the addition of three vectors is at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/Vectors/Add3Vectors.html
Activity 4
A. Two vectors have different magnitudes. Can their sum be zero? Explain.
B. If one component of a vector is nonzero, can the vector have zero magnitude?
Explain.
Activity 5
Assume that the speed of sound is exactly 344 m/s relative to the air. Assume that the
speed of light is exactly 3 x 108 m/s relative to the observer.
A. If you are pursuing a sound wave at a speed of 99% of the speed of sound, what is
the speed of the sound wave relative to you?
B. If you are moving through the air at 99% of the speed of sound in the opposite
direction to the velocity of a sound wave, what is the speed of the sound wave
relative to you?
C. If you are pursuing a light wave at 99% of the speed of sound, what is the speed
of the light wave relative to you?
D. If you are pursuing a light wave at 99% of the speed of light, what is the speed of
the light wave relative to you?
PHY131 Practicals Manual
Mechanics Module 2
20
Activity 6
We model Sponge Bob Square Pants as a simple
sponge of width w, height h, and depth d. He is 6
cm wide, 12 cm high, and 4 cm deep.
It is raining. The raindrops are falling straight
down at a constant speed of 9 m/s. Each raindrop
has a diameter of 5 mm, and we can treat them as
perfect spheres. There are 8000 raindrops per
cubic meter.
A. Bob is stationary in the rainstorm. How many raindrops per second fall on the top
of his head, i.e. the upper horizontal surface of the sponge? Do any raindrops
strike his vertical surfaces?
B. Bob is now walking forward at 1.3 m/s. What is the velocity of the raindrops
relative to Bob?
C. Now how many raindrops per second fall on the top of his head?
D. Bob is initially 50 m from a shelter. How many raindrops fall on the top of his
head until he reaches the shelter?
E. How many raindrops per second strike his “face” i.e. the vertical surface of width
w and height h?
F. How many raindrops strike his face before he reaches the shelter?
G. Instead of walking, Bob runs for the shelter at 2.5 m/s. What is the velocity of the
raindrops relative to Bob?
H. Now how many raindrops per second strike his “face” i.e. the vertical surface of
width w and height h?
I. Now how many raindrops strike his face before he reaches the shelter?
J. If it is raining, is it worth running for shelter instead of walking?
Activity 7
You can swim at a speed v relative to the water. You are swimming across a river which
flows at a speed V relative to the shore. The river is straight and has a constant width.
A. If you wish to swim directly across the river, in what direction should you swim
relative to the water in the river?
B. If you wish to get across the river as quickly as possible and don’t care where you
land on the opposite bank, in what direction should you swim relative to the
water?
PHY131 Practicals Manual
Mechanics Module 2
21
Activity 8
Joe is stationary on the ground, and sees an
airplane moving to the right with a speed of
200 m/s and accelerating at 5 m/s2. Suzy is
driving to the left at a constant 40 m/s and
Latoya is driving to the right at a constant 40
m/s.
A. Rank in order, from the largest to the
smallest,
the
airplane’s
speed
according to Suzy, Joe, and Latoya at the moment shown in the figure. Explain.
B. Rank in order, from the largest to the smallest, the magnitude of the airplane’s
acceleration according to Suzy, Joe, and Latoya. Explain.
Activity 9
This Activity uses the Cart and Track that were introduced in Module 1. Remember to:
Push the Cart and let it run up and down the Track a few times to warm up the
bearings in its wheels.
Check that the Track is level.
Now use the thin blocks to raise the side of the Track closest to the wall a few
millimeters.
A. Place the Cart on the Track near the end closest to the wall, place the supplied
wooden block on the Cart, and give the Cart a very gentle push. Does it move at a
constant speed down the track? If it is slowing down, raise the height a bit more.
If it is speeding up, reduce the height. At what height does the Cart move at
approximately constant speed? The playing cards are a good way to make small
changes in the height.
B. When the Cart is moving at constant speed down the Track, sketch a Motion
Diagram of its motion.
C. Treat the Cart plus the block on top of it as a single system. When the Cart is
moving at constant speed down the Track, sketch a Free Body Diagram of all the
forces acting on the system when it is about half-way down the Track.
D. How much can you vary the height of the track and not see any difference in the
motion of the Cart? The playing cards are a good way to introduce small changes
in the height.
E. Express your result from Part A as a single value. Include your result from Part D
by adding a ± error term to the value.
PHY131 Practicals Manual
Mechanics Module 2
22
F. Place the wooden block in front of the Cart so the cart will push it down the
Track. Now there will be more friction. Now what height must you raise the
Track to have the Cart moving at approximately constant speed?
G. Again treat the Cart plus the wooden block as the system. Sketch a Free Body
Diagram of all the forces acting on the system for Part F.
H. If you could completely eliminate the friction of the Cart and Track, what height
would the end of the Track be raised for the Cart to move at constant speed?
I. Is it ever possible to completely eliminate friction?
J. Remove the wooden block but keep the Track at the same angle as Part F. Give
the Cart a gentle push. Draw a Motion Diagram of its motion down the Track.
K. Draw a Free Body Diagram of all the forces acting on the Cart in Part J when it is
about half-way down the Track. Compare to your Free Body Diagram of Part C.
Activity 10
For this Activity you will be using a computer-based laboratory system with an ultrasonic
motion sensor and motion software. The motion sensor acts like a stupid bat when
hooked up with a computer-based laboratory system. It sends out a series of sound pulses
that are too high frequency to hear. These pulses reflect from objects in the vicinity of the
motion sensor and some of the sound energy returns to the sensor. The computer is able
to record the time it takes for the reflected sound waves to return to the sensor and then,
by knowing the speed of sound in air, figure out how far away the reflecting object is.
There are a few points to be aware of when using the sensor:
1. The sensor cannot detect distances less than about 0.15 meters because it cannot
record reflected pulses than come back too soon after they are sent.
2. The ultrasonic waves spread out in a cone of about 15° as they travel. They will
“see” the closest object. Be sure there is a clear path between the object you are
tracking and the motion sensor.
For further details, see the manual on the detector and software at:
http://faraday.physics.utoronto.ca/Practicals/Equipment/MotionSensor.pdf
Set the detector to collect about 40 samples per second. Set the switch on top of the
sensor to the wide beam, which on some sensors is indicated by an icon of a person.
Use the system to take position-time data of one of your Team as he/she walks towards
and away from the sensor. Try to glide as smoothly as possible at constant speed.
Loose clothing like bulky sweaters are good sound absorbers and may not be
“seen” very well by the motion sensor.
PHY131 Practicals Manual
Mechanics Module 2
23
The software will compute the average velocity and acceleration, just as you did by hand
in Activity 8 of Module 1. Use the software to do those computations. Does the plot of
average velocity look smooth? If not, why? What about the plot of average acceleration?
Activity 11
Mount the motion sensor on the end of the Track closest to the wall, and use the hardware
and software to repeat Part D of Activity 9. Use the switch on top of the sensor to select
the narrow beam, which on some sensors is indicated by an icon of a cart. Set the angle of
the sensor to 0 so it is “looking” straight down the track.
Setup the sensor so it takes 5 samples per second. Do not try to measure distances less
than about 0.15 m.
A. Does this do a better job than the estimates by eye that you did in Activity 10?
Explain. In particular, is the ± error term using this method smaller than the result
for Part E of Activity 10?
B. Save your distance-time data for one of your trials to the server by using the File
tab of the Motion Sensor vi. Use a descriptive name for the file. Since this is
Module 2, Activity 11, if you have raised the track by 3 mm the file name could
be: M2A11_3mm. Write down the name of the file and the path in the lab book.
C. The datafile is a tab separated text file. Look at the file using either Excel or a text
editor, but do not change the contents. For constant acceleration a, the distance d
depends on the initial distance d0, initial speed v0 according to:
d d 0 v0 t
1 2
at
2
Use the PolynomialFit program, which is available on your computer’s desktop,
to fit the dataset to a second order polynomial (Powers 0 1 2). Is the acceleration
of the Cart zero within errors? How does using the Motion Sensor compare to you
doing it by eye as in Activity 9?
Activity 12
In this Activity you will use a Force Sensor. When connected to appropriate software,
this device measures forces exerted on it. The device uses a piezoelectric material, which
generates a voltage proportional to the force exerted on it. Other uses of piezoelectrics
PHY131 Practicals Manual
Mechanics Module 2
24
include contact microphones, the motion sensor capabilities of the Sony Playstation 3 and
Nintendo Wii controllers.
Pick out one of the Number 24 rubber bands as your
standard rubber band. You may want to identify it by
marking it with a pen or pencil. Loop the rubber band
loose around your fingers as shown. Slowly separate
your hands until the rubber band is not slack.
Now separate your hands by some further
predetermined “standard” length that you choose.
You can feel that the rubber band is exerting
forces on both of your fingers. How do the
magnitudes of these two forces compare?
Each member of your Team should do this simple
little experiment.
A. When stretched by the standard length the rubber band is exerting a standard
force on your fingers. Decide what name you wish to give to this standard force.
B. Now loop the rubber band around the hook on the Force Sensor that is mounted
on the vertical rod and start the Force Sensor program on the computer. Push the
Tare button on the Force Sensor to zero its reading. Stretch the rubber band by the
standard length and determine the force in newtons corresponding to your
standard force.
C. If you were to attach the rubber band to a Cart on the Track and kept the rubber
band stretched by your predetermined length, the Cart would accelerate. (This
would take some physical dexterity to achieve.) What other ways can you think of
to apply an equivalent standard force to the Cart?
D. How would you test to determine that these forces really are equivalent to your
standard force?
E. Which of the methods you thought of in Part D do you think is the best one?
Activity 13
A. Loop the standard rubber band
around your fingers and stretch it by
your standard length to refresh your
PHY131 Practicals Manual
Mechanics Module 2
25
memory about what the standard force feels like. Now loop two rubber bands
around your fingers and stretch them by your standard length. How does the force
exerted on your fingers with two rubber bands compare to just one?
B. Repeat with three rubber bands.
C. Use the Force Sensor to check your feelings about the magnitudes of the forces.
D. Is there any difference between the forces exerted on the Force Sensor by a rubber
band and an equal force exerted on it when you just hold the hook and pull?
Explain.
Activity 14
In this Activity you will use a Fan Cart. This has a two-speed motor which causes the fan
to rotate.
A. Keep your fingers away from the moving fan blade!
B. Avoid a runaway Cart falling off the Track.
Level the Track and leave the Motion Sensor mounted on one end. Warm up the bearings
of the wheels of the Fan Cart by rolling it up and down the Track a few times. Set the fan
angle at zero degrees.
A. Place the Fan Cart on the Track close to the Motion Sensor but at least 0.15 m
away from it. You will want the direction of the air from the fan to blow towards
the Motion Sensor. Turn the fan on low and use the Motion Sensor to measure the
acceleration of the Cart.
B. Sketch a motion diagram of the Cart.
C. Consider the Cart, motor, fan and the housing for the fan as the system under
consideration. Sketch a Free Body Diagram of all the force acting on the system
when the Cart was accelerating in Part A.
D. Use the Force Sensor to measure the net horizontal force acting on the system
when it is not moving. Is this the force acting on the system when it is moving?
E. Repeat Parts A – D with the fan on high.
F. Sketch a graph of acceleration versus force, with the force on the horizontal axis.
Be sure to include the origin on the graph. Although you only have two data
points, what do you think the shape of the graph is for an arbitrary number of data
points?
G. Is there a “free” third data point that you can include in your graph? Hint: what is
the acceleration of the Fan Cart when the fan is off?
H. Sketch a straight line that “fits” the two data points. Should the line go through
the origin?
I. How much can you vary the slope of the line and still more-or-less “fit” the data?
Graphical estimation of slopes and their errors was discussed in Section 14 –
Graphical Analysis of the document on error analysis that was also the
assignment due at the first Practical.
PHY131 Practicals Manual
Mechanics Module 2
26
J. Write down the relation between the force F and acceleration a as an equation
including any necessary constants. Include as estimate of the error in those
constants.
K. Place the sail on the magnetic pad of the Cart with the plane of the sail parallel to
the plane of the fan. Predict the motion of the Cart when the fan is blowing.
L. Check your prediction. Explain the result.
Activity 15
A key aspect of the scientific method is that often when a physical system has many
variables we can keep all but two of the variables constant, and can investigate how those
two variables relate to each other. In Activity 14 you varied the force applied to the Cart
and saw how different forces cause different accelerations of the Cart. In this Activity
you will apply the same constant force to the Cart but will vary its mass.
A. Measure the mass of the Fan Cart, the non-fan Cart, and the two black rectangular
masses.
B. The Fan Cart stacks on top of the non-fan one. In addition, the black rectangular
masses can be placed on the magnetic pad of the Fan Cart. How many possible
values of the total mass are possible using the Fan Cart with and without the
rectangular masses both by itself and when stacked on top of the non-fan Cart?
C. Measure the acceleration three or four of the values of the mass you determined in
Part D. Which masses did you choose to measure and why?
D. Sketch a graph of acceleration versus total mass, with the mass on the horizontal
axis. What is the shape of the graph?
E. Sketch a graph of acceleration versus one over the mass, with one over the mass
on the horizontal axis. Include the origin in the graph. Is this graph simpler than
the one in Part F?
F. For the graph of Part E, draw a straight line that “fits” the data. Should the line go
through the origin? Why?
G. Write down the relation between mass m and acceleration a including any
necessary constants and their errors.
H. Combine your result for Part G and Activity 14 Part H into a single equation
involving F in newtons, m in kg, and a in m/s2 and any necessary constants. You
may find the following useful:
What is the value of constant you found in Part J of Activity 15 in terms of
any physical parameters of the system?
What is the value of the constant you found in Part G of this Activity in terms
of any physical parameters of the system?
I. Repeat Part H when the force is expressed in the unit you chose for the standard
force in Activity 12 Part A. Are there any constants required now? Explain.
PHY131 Practicals Manual
Mechanics Module 2
27
Activity 16
For one-dimensional motion in the x direction, here are three ways to write Newton’s 2nd
Law:
1. Fx max
1
2. a x Fx
m
Fx
3. m
ax
Although these three forms are mathematically equivalent, in terms of using mathematics
as a language to describe the relation between forces, masses and acceleration they are
not. Which form best describes the central idea of Newton’s 2nd Law? Explain.
Hint: when you write that some variable y is a function of another variable x, such as:
y = f(x)
one variable is called the independent variable and another is called the dependent
variable. Which is which, and why is this terminology used?
This Guide was written in July 2007 by David M. Harrison, Dept. of Physics, Univ. of Toronto. Some parts
are based on Priscilla W. Laws et al, Workshop Physics Activity Guide (John Wiley, 2004) Unit 5. The
figures in Activities 12 and 13 are modified from Randall D. Knight, Physics for Scientists and Engineers
(Pearson Addison-Wesley, 2004), Figure 4.16.
Last revision: October 3, 2008
PHY131 Practicals Manual
Mechanics Module 2
28
Mechanics Module 3
Student Guide
Concepts of this Module
Equilibrium
Mass and weight
Two dimensional motion
Projectile motion
Circular motion
Tensions and Ropes
Preparation for this Module
In each of the four elevators in the tower of the Physics building is mounted a spring
scale with a mass hanging from it. Before this Practical take a ride in one of the elevators
and note what happens to the reading of the scale for the six cases listed in Activity 2
below.
The Activities
Activity 1
A round table is supported by three legs. If you are going to push down on the top of the
table to make it unstable, where is the best place to push? Explain.
Activity 2
As preparation for this Module you took a ride on one of the elevators in the tower,
paying attention to the reading of the spring scale for six different cases:
a)
b)
c)
d)
e)
f)
Starts from rest and starts moving to a higher floor.
Is moving uniformly up.
Approaches the higher floor and starts slowing down.
Starts from rest and starts moving to a lower floor.
Is moving uniformly down.
Approaches the lower floor and starts slowing down.
For each of the six cases:
PHY131 Practicals Manual
Mechanics Module 3
29
A. Describe the reading of the scale.
B. Sketch a Free Body Diagram of all the forces acting on the mass during the
motion being investigated. Use the diagram to explain the reading of the scale.
C. Suppose that instead of a single mass suspended
from a spring scale, the apparatus consisted of a pan
balance with two masses with equal values on the
pans. What would be the motion of this balance for
each of the six cases you investigated? Explain.
Activity 3
In Jules Verne’s From the Earth to the Moon (1865)
a huge cannon fires a projectile at the moon. Inside the
projectile was furniture, three people and two dogs.
The figure is from the original edition.
Verne reasoned that at least until the projectile got
close to the Moon it would be in the Earth’s
gravitational field during its journey. Thus the people
and dogs would experience normal gravity, and be able
to, for example, sit on the chairs just as if the projectile
were sitting on the Earth’s surface.
One of the dogs died during the trip. They put the
dog’s body out the hatch and into space. The next day
the people looked out the porthole and saw that the
dog’s body was still floating just beside the projectile.
A. Is there a contradiction between the inhabitants inside the projectile experiencing
normal gravity and the dog’s body outside the projectile not falling back to the
Earth?
B. If your answer to Part A is yes, where did Verne make his mistake? If your
answer is no, explain.
Activity 4
A bucket of water has a one end of a spring soldered to the bottom,
as shown. A cork is attached to the other end of the spring and is
suspended motionless under the surface of the water. You are
holding the bucket so that it is stationary
A. Draw a Free Body diagram of all the forces acting on the
cork.
PHY131 Practicals Manual
Mechanics Module 3
30
B. As Archimedes realized a long time ago, the upward “buoyant” force on the cork
is equal to the weight of the water that the cork has displaced. Imagine an
identical bucket-spring-cork system is stationary on the surface of the Jupiter
where the acceleration due to gravity is 2.65 times greater than on Earth.
Compared to the bucket-spring-cork on Earth, is the cork closer to the surface of
the water, closer to the bottom of the bucket, or in the same relative position?
C. Imagine that you take the Earth bucket-spring-cork onto an elevator. The elevator
starts accelerating upwards. While it is accelerating does the cork move closer to
the surface of the water, closer to the bottom of the bucket, or stay in the same
relative position?
D. Imagine that you take the Earth bucket-spring-cork up on the roof of a tall
building. Still holding the bucket you step off. While you are in free fall towards
the ground, does the cork move closer to the surface of the water, closer to the
bottom of the bucket, or stay in the same relative position?
Activity 5
Wilma, queen of the drag strip, is about to race her Corvette Z06. She is
stationary on the track, waiting for the lights to go green so she can accelerate
down the strip. For luck, she always has a pair of fuzzy dice of mass m hanging from the
rear view mirror.
We will model the dice hanging from the rear view mirror with the supplied ball and
string.
One of your Team should hold the string with the ball hanging down. This person then
begins walking forward at a fairly high speed.
A. Before the person started walking sketch a Free Body Diagram
of all the forces acting on the ball.
B. Initially the ball was at rest for all of you. Newton’s First Law
says that bodies at rest remain at rest until a force causes their
state of motion to change. When the person holding the ball
begins walking what does he/she see the ball do? Is this what
Wilma would see the fuzzy dice do? Are these consistent with
Newton’s First Law? Explain.
C. For those of you who were not holding the ball and string,
what did you see the ball do when the person holding the
string began walking? Is this consistent with Newton’s First Law? Explain.
D. Assume Wilma is accelerating at a constant rate a. For you, standing beside the
track, the dice reach a steady state where they are not hanging straight down, but
make an angle θ with the vertical as shown. Draw the Free Body diagram of all
external forces acting on the dice.
E. What is the angle θ?
PHY131 Practicals Manual
Mechanics Module 3
31
Activity 6
Wilma, queen of the drag strip, has taken the kids to the zoo in her SUV. They are going
home, and the kids are sitting in the back seat while the SUV is stopped at a stop light.
Wilma bought them a Helium-filled balloon, which they are holding by the string so it is
not touching the roof of the SUV. The balloon “floats” in the air because of a buoyant
force on it, which Archimedes realized long ago is equal to the weight of the displaced
air. The windows of the car are all rolled up. The light turns green and Wilma accelerates
the SUV, but certainly at a lower rate than when she races her ‘vette at the drag strip.
Describe the motion of the balloon as seen by the kids after the light turns green.
Activity 7
A “funnel cart” has a ball on top of a funnel. Inside the
funnel is an apparatus that fires the ball straight up at a predetermined time. If the cart is stationary, when the ball is
fired it goes straight up and then lands back in the funnel.
A. The cart is moving to the right at constant speed.
When the ball is fired, does it land in the funnel? If
not where does it land? Why?
B. Now the cart is being pulled to the right and is
accelerating. When the ball is fired, does it land in the funnel? If not where does it
land? Why?
C. Now the cart is rolling down a frictionless inclined
track. Assume that the track is longer than is shown in
the figure. When the ball is fired, does it land in the
funnel? If not where does it land? Why?
PHY131 Practicals Manual
Mechanics Module 3
32
Activity 8
In Module 2 Activity 14 you used a Fan Cart
with a mass sitting on the magnetic pad, as
shown. Assume, as you did in that Activity,
that the friction of the wheels is negligible. The
mass on the pad has a value m, and the mass of
the cart, fan, motor etc. is M. A total force F is
exerted on the system. As you showed, the
acceleration a of the system is:
a
F
.
M m
A. If the pad on the Cart was not magnetic and was also super slippery, when you
released the Cart what would have been the motion of the mass m?
B. For this case what would have been the acceleration of the Cart?
C. In the actual case, the mass m moves along with the Cart with the same
acceleration. Sketch a Free Body Diagram of all the forces acting on the mass m
for this case.
D. What is the magnitude and direction of the horizontal force exerted on mass m?
What is the cause of this force?
E. Sketch a Free Body Diagram of all the forces acting on the mass M.
F. From Part E calculate the acceleration of mass M. Is your value reasonable?
Activity 9
Whirl the supplied ball on a string in a horizontal circle, being careful not to hit anybody
or thing with it. Try to maintain the ball at constant speed.
A. What is the net vertical force on the ball?
B. Sketch a Free Body Diagram of the forces acting on the
ball for some point in its circular orbit. There is a common
convention for indicating vectors that are going out of or
into the page, illustrated to the right. It is like an arrow:
when it is moving towards us we see the tip, but when it is moving away from us
we see the feathers at the other end of the arrow.
PHY131 Practicals Manual
Mechanics Module 3
33
C. What must be the direction of the ball’s acceleration to keep it moving in a
horizontal circle?
D. From you Free Body Diagram determine the net force acting on the ball. Does this
agree with Part C?
E. To maintain the ball at constant speed you need to move your hand that is holding
the string. Explain why this is so. What would be the necessary condition to
maintain the ball in uniform circular motion without needing to move your hand?
F. If you suddenly let go of the string, what will be the motion of the ball? If you
actually do this, be sure that you know in what direction the ball will go so that
you don’t hit anybody or thing.
Activity 10
Tarzan is swinging back and forth on a vine. We will model
his motion with the supplied ball and string, and will
assume that air resistance is negligible.
Fix the upper length of the string to a fixed point. Hold the
ball so the string makes an angle of about 45° = /4 radians
and release it from rest so that it swings back and forth.
A. Using the supplied graph paper, draw a Motion Diagram
for when the ball is released until it reaches its
maximum swing on the other side. Use a total of 11
dots, with the 1st dot for the moment he steps off the
branch, the 6th dot for when the vine is vertical, and 11th
dot to the next position where the instantaneous speed is zero.
B. Imagine that the dots in the diagram of Part A were for Tarzan’s motion every
second. Now draw an expanded scale Motion Diagram on another sheet of graph
paper for the first second after he steps off the branch. Use 11 dots, each representing
his position every 0.1 seconds. Connect the dots with vectors which are proportional
the average velocity vectors.
C. Re-draw the velocity vectors from Part B from a common origin. What is the
direction of Tarzan’s acceleration when he just steps off the branch?
D. Sketch a Free Body Diagram of all the forces acting on Tarzan when he just stepped
off the branch. What is the direction of the total force acting on him?
E. Draw an expanded scale Motion Diagram for Tarzan’s motion from 0.5 seconds
before he reaches the bottom of his swing to 0.5 seconds after, again using a total of
11 dots. Connect the dots with vectors pointing from one position to the next.
F. Re-draw the velocity vectors from Part E from the same origin. What is the direction
of Tarzan’s acceleration at the moment that the vine is vertical?
G. Sketch a Free Body Diagram of all the forces acting on Tarzan when he is at the
bottom of his swing? What is the direction of the total force acting on him?
PHY131 Practicals Manual
Mechanics Module 3
34
Activity 11
Whirl the supplied ball on a string in a vertical circle. Have the ball moving fast enough
that the string remains taut at all times.
A. Qualitatively how does the speed of the ball at the top of the circle compare to its
speed at the bottom of the circle?
B. Sketch a Motion Diagram of the motion of the ball.
C. Your hand can feel the tension the string is exerting on it. How does this tension
related to the force being exerted on the ball? Qualitatively how does the force
exerted on the ball at the top of the circle compare to the force exerted on it at the
bottom of the circle?
D. Allow the speed of the ball the decrease until the string is no longer taut at some
point near the top of the circle. Sketch a Motion Diagram of the motion of the ball
after this point in its motion.
Activity 12
Suppose you were to hang masses of m = 0.5 kg from the Force Sensors with light strings
in the configurations shown below.
Predict
readings of the Force Sensors for each of A – G.
PHY131 Practicals Manual
the
Mechanics Module 3
35
Check your prediction by doing the measurements. The sensor tends to “drift” in time.
Therefore, before each measurement you should:
1. Have zero force being exerted on the sensor.
2. Press the Tare button on the sensor.
Activity 13
In the figure professional wrestler Randy “Macho
Man” Savage is suspending a 10 kg mass with a
rope between his two hands. Is the strongest
member of your team, or even the Macho Man,
strong enough to keep a heavy mass stationary
and the rope perfectly horizontal? Explain
Activity 14
A wooden rod is suspended by a string tied to one end; the other end of the string is tied
to a fixed support. The other end of the rod is resting on a piece of Styrofoam that is
floating on water. Which figure is closest to the equilibrium position of the system?
Explain your answer.
Your Instructors will demonstrate this system. Was your prediction correct?
PHY131 Practicals Manual
Mechanics Module 3
36
Activity 15
In the figure the Track is at an angle
with the horizontal. The Cart has a
mass M approximately equal to 0.5
kg. It is connected to a hanging mass
m = 0.0500 ± 0.0001 kg by a
massless string over a massless
pulley.
A. Use the balance to measure the mass M of the Cart.
B. For some angle the masses are in equilibrium, i.e. if they are at rest they remain
at rest and if they are moving at some speed the continue moving at that speed.
Calculate the value of the angle . Express your result in radians.1
C. The end of the Track that has the pulley mounted on it can be moved up and down
using the attached clamp and the vertical rod mounted to the table. You may find
that to make changes in the angle of the Track it is easiest to adjust the position of
the vertical rod. Verify your prediction of Part B. The digital level is a good way
to measure the angle of the Track.
Activity 16
A. How much can you change the angle of the Track and not see any visible
deviation from equilibrium. Express your result from Part C of Activity 15 and
from Part A of this Activity by expressing the angle for equilibrium as ± ,
with both values in radians.
B. Imagine you are going to use this apparatus as a silly way of measuring the mass
M of the Cart. From Part B what is the value and error of M determined this way?
What is the dominant error in your measurements that has the greatest effect on
your value of M?
C. The string is not really massless. Can you think of an experimental procedure for
which the mass of the string does not matter?
This Guide was written in July 2007 by David M. Harrison, Dept. of Physics, Univ. of Toronto. Some
parts are based on Priscilla W. Laws et al., Workshop Physics Activity Guide (John Wiley, 2004), Unit 7.
Christos Josephides and Andrew Zasowski have participated in development of the Mechanics Modules 1 –
4, and wrote much of Activity 9 of this Module.
Last revision: October 16, 2008.
1
1 radian = 57.2958°, or 2 radians = 360°, or radians = 180°.
PHY131 Practicals Manual
Mechanics Module 3
37
Mechanics Module 4
Student Guide
Concepts of this Module
Impulse-momentum Theorem
Conservation of Momentum
Introduction to Conservation of Energy
Angular Momentum
The Activities
Activity 1
Setup:
Make sure the Track is level.
The Motion Sensor should be mounted on the end of the Track closest to the wall
and connected to the DAQ board.
Clamp a vertical rod to the Table Clamp on the end of the Pod opposite the wall,
and place the Track so the end without the Motion Sensor is almost touching the
rod.
The Force Sensor with the spring bumper attached should be mounted on the
Cart. Measure the total mass of the Cart and Force Sensor.
Place the Cart on the Track with the bumper facing the vertical rod. Connect the
Force Sensor to the DAQ board. Press the Tare button on the Force Sensor to zero
its readings.
Run the Cart up and down the Track a few times to warm up the bearings in the
wheels.
Set the sample rate for the Motion Sensor to 50 samples per second. Set the
sample rate for the Force Sensor to 100 samples per second.
Now the Activities:
A. You want the spring bumper on the Force Sensor to collide with the vertical rod
mounted on the Table Clamp. The Cart will drag the wire connecting the Force
Sensor to the DAQ board; make sure it is as free to move as possible. You may
need to adjust the position of the Track and/or vertical rod to get a nice “clean”
collision.
B. Take data on the speed versus time using the Motion Sensor and force versus time
using the Force Sensor from a second or so before the collision to a second or so
after the collision.
C. From the speed versus time data, what is the momentum of the Cart plus Force
Sensor just before the collision? What is the momentum just after the collision?
PHY131 Practicals Manual
Mechanics Module 4
38
D.
E.
F.
G.
Use the convention that the speed of the Cart before the collision is a positive
number, and the speed after the collision is a negative number.
What is the change in the momentum from just before the collision to just after?
From the force-time data, visually estimate the total impulse exerted on the Cart
during the collision: this is the area under the force-time graph. Compare your
result to Part D.
Use the software to calculate the total impulse exerted on the Cart. Which result
do you think is better, the software’s calculation or your estimate in Part E?
Explain.
Export your speed-time data into a file on the server. Since this is Module 4,
Activity 1 Part G, the name of the file could be something like: M4A1PG_vt.
Activity 2
The Physics presented in textbooks almost always deals with ideal cases. For example, in
that context we often say “ignore air resistance” or “assume that friction is negligible.” In
the real world, often these idealizations are not correct.
For example, we know that there is always friction between the Cart and the Track. In
Activity 4, there was additional “friction” because the Cart was dragging the wire of the
Force Sensor, and the effect of these two forces is easily seen in the data. . These extra
forces are in the opposite direction to the motion of the Cart, so always slow down the
magnitude of the velocity, regardless of whether the velocity is a positive or negative
number.
Here we will investigate some ways of dealing with these terms
A. Copy the file you saved in Activity 1 to some name like M4A5_vt_Edited.
B. Use a text editor or spreadsheet program to:
Remove all the speed-time data for when the collision is occurring.
Change the values of the speeds after the collision to positive numbers. If you
are using Excel but are not very familiar with this program, Appendix A
discusses some ways to do this.
C. Fit the edited data to a straight line using the PolynomialFit program. What is the
meaning the slope of the line? If the slope is found to be zero within errors what
does this say about the total friction acting on the system?
D. What is the change in the momentum of the Cart plus Force Sensor during the
collision due to these extra forces? Can you express your answer including an
error term?
E. Considering your data and your experience with these Carts, which force do you
think is largest, friction or dragging the wire?
PHY131 Practicals Manual
Mechanics Module 4
39
F. What is the change in momentum of the Cart plus Force Sensor during the
collision due to the collision itself? Is this a better value than you got in Part D of
Activity 1?
G. We can eliminate the term due to dragging the wire by mounting the Force Sensor
on the vertical rod mounted on the Table Clamp. Now the Force Sensor will
measure the force exerted on it by the Cart. How is this related to the force
exerted by the Force Sensor on the Cart?
H. Is this a better procedure than the one you used in Activity 4? Explain.
Activity 3
You are asleep in your room, but a fire has broken out in the hall and smoke is pouring in
through the partially open door. You need to close the door as soon as possible. The room
is so messy you cannot get to the door. You have a ball of clay and a super ball, each with
the same mass. If you throw the clay at the door it will stick to it; if you throw the super
ball at the door it will bounce off. You only have time to throw one thing at the door.
A. Which should your throw at the door, the clay or the super ball? Explain.
B. Which ball will experience the largest impulse during the collision?
C. From Newton’s 3rd Law the impulse that the door exerts on the ball during the
collision is equal in magnitude although opposite in direction to the impulse the
ball exerts on the door. Which ball exerts the largest impulse on the door?
Activity 4
Three identical balls slide on a table
and hit a block that is fixed to the
table. In the figures we are looking
down from above. In each case the
ball is going at the same speed before
it hits the block.
Rank in order from the largest to the
smallest the magnitude of the force
exerted on the block by the ball.
PHY131 Practicals Manual
Mechanics Module 4
40
Activity 5
An air track is similar to the Track you have been using in the Practicals. The track has
small holes drilled in it, and air blows out of the holes. Thus the carts for the air track
float on the air and there is extremely low friction between the cart and the track. An
animation of an air track is at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/AirTrack/AirTrack.html
There are six possible collisions that may be simulated: three different values for the
mass of one of the carts, with elastic “bouncy” and inelastic “sticky” collisions for each
value of the mass.
A. The momentum p mv is also called the quantity of motion and sometimes just
the inertia. For Newton momentum was central to his thinking about dynamics.
Use the animation to determine if the total momentum of the carts is conserved
before and after each of the six possible collisions.
B. For Leibniz, a contemporary and rival of Newton, momentum was not central to
his thinking. Instead he concentrated on the quantity mv2, which he called the vis
viva (literally “living force”). Use the animation to determine if the total vis viva
of the carts is conserved before and after each of the six possible collisions.
C. Which concept, momentum or vis viva, appears to be the most fundamental?
Appendix A – Using Excel
Here is what the raw data file might look like:
PHY131 Practicals Manual
Mechanics Module 4
41
We will delete rows 7 through 11. Click on the 7 row label. Hold
down the Shift key and click on the 11 row label. This will select
the rows.
Right click on the highlighted area and choose Delete.
Now change all the negative values for the speeds after the
collision to positive values. The “brute force” way to do this is to
double click on each cell with a negative velocity and manually
remove the minus sign, although Excel experts will know of a
more elegant way to do this. The result is shown to the right.
Save the file. You may ignore Excel’s mumbling about losing
information.
This Guide was written in July 2007 by David M. Harrison, Dept. of Physics, Univ. of Toronto. Some
parts are based on Priscilla W. Laws et al., Workshop Physics Activity Guide (John Wiley, 2004), Unit 8.
Last revision: August 8, 2008.
PHY131 Practicals Manual
Mechanics Module 4
42
Teamwork Module
Student Guide
In the real world as well as in many aspects of your University studies you work in teams.
This Module will help you to learn how to make your own teamwork more effective and
pleasant. The Module has the following sections:
Preparation for this Module. Things you should read and do before coming to
the Practical.
Teamwork Basics. This is a discussion of some of the issues that determine
whether a team functions effectively, and ways to deal with any problems that
arise. (Pages 1 – 5)
Teamwork Activity. A set of characteristics of effective and ineffective teams.
You both individually and as a team rank these characteristics. (Page 6)
Teamwork Homework. After this Module you may be assigned to write a short
paper about teamwork. The paper is described in this section. It will be due one
week after the Practical that uses this Module. (Pages 7 – 8)
Preparation for this Module
1. Read the next section of this Module, Teamwork Basics.
2. Do the ranking exercise of the following section, Teamwork Activity.
Teamwork Basics
Two things get accomplished in good teams: the task gets accomplished and the
satisfaction of team members is high. In order to achieve both of these ends:
Get to know other members of your group and their strengths
Set ground rules
Use a facilitator
Keep lines of communication open
Know how to avoid (or solve) common problems
Ground Rules
Setting some basic ground rules helps to insure that everyone is in agreement about how
the team will operate. You will want to establish norms about how work will be done,
the role and responsibilities of a facilitator, how you will communicate with one another,
and how your meetings will be run. Some of the ground rules can be decided on now;
others will develop as the semester progresses.
PHY131 Practicals Manual
Teamwork Module
43
1.
Work Norms: How will work be distributed? Who will set deadlines? What
happens if someone doesn't follow through on his/her commitment (for example, misses a
deadline)? How will the work be reviewed? What happens if people have different
opinions about the quality of the work? What happens if people have different work
habits (e.g., some people like to get assignments done right away; others work better with
the pressure of a deadline).
2.
Facilitator Norms: Will you use a facilitator? How will the facilitator be
chosen? Will you rotate the position? What are the responsibilities of the facilitator?
(see below)
3.
Communication Norms: When should communication takes place and through
what medium (e.g., do some people prefer to communicate through e-mail while others
would rather talk on the phone)?
4.
Meeting Norms: What is everyone's schedule? Should one person be
responsible for coordinating meetings? Do people have a preference for when meetings
are held? Where is a good place to hold meetings? What happens if people are late to a
meeting? What happens if a group member misses a meeting? What if he/ she misses
several meetings?
5.
Consideration Norms: Can people eat at meetings? smoke? What happens if
someone is dominating the discussion? How can norms be changed if someone is not
comfortable with what is going on in the team?
About Goals: Often there is the unstated assumption in student teams that everyone
wants to get an "A" in the course, and that should be the team's primary goal. But
sometimes, as the semester progresses and everyone gets pressed for time, people have to
make decisions about which courses take priority. If this course is a higher priority for
some team members than for others, that can create dissension in the group. Talking
about this will help to lessen that tension and help you find solutions to the problem.
Keep communicating with one another!
Also, there may be other goals you want to consider as you work together during the
semester. These include: having a high level of camaraderie in the team, learning about
how to work together on a team-based project, or learning how to interact with others as a
member of a team.
The Responsibilities of the Facilitator
The facilitator is not necessarily the group’s leader although he/she can be. It is better to
think of the facilitator as the person who keeps the group progressing in the right
direction (i.e., toward productivity). Therefore, the facilitator should:
PHY131 Practicals Manual
Teamwork Module
44
Focus the team on the task (both short term and long term)
Get participation from all team members
Keep the team to its agreed-upon time frame (both short term and long term)
Suggest alternative procedures when the team is stalled
Help team members confront problems
Summarize and clarify the team’s decisions
Hints for Handling Difficult Behavior
Just one difficult personality in a group can make the group unproductive and the teamwork experience
unpleasant. Here are some suggestions for resolving problems:
How the Person
Acts
Description
What to Do
Overly Talkative
This person is usually one of
four types: (a) an "eager beaver";
(b) a show-off; (c) very wellinformed and anxious to show
it; (d) unable to read the responses
of others and use the feedback to
monitor his/her own behavior.
Sometimes humor can be used to discourage people from dominating the
discussion; be sure when the person
stops talking to direct the conversation
to another person.
Too quiet
The quiet person may be: shy,
bored, tired, unsure of himself/
herself, uninvolved in the group.
Make a special effort to draw this person
out: ask for his/her opinion on something;
ask him/her something about himself/herself; tell the person you appreciate his/her
participation.
Argues
Is the person critical of ideas,
the group process, or other
group members?
If the person is critical of ideas, use that
response to test the work the group is
doing--the person may be providing good
feedback. If he/she is critical of others,
tell him/her how the effect that is having
on both the team or individual team
members. Be explicit about the fact that
his/her behavior is detrimental to the goals
of the team.
PHY131 Practicals Manual
If the person's behavior can't be changed
subtly, one member of the group should
speak to the person privately and explain
that while his/her enthusiasm is appreciated,
it's only fair to the whole group that every
person gets an equal amount of air time.
Teamwork Module
45
Complains
The person may have a pet peeve,
or may complain for the sake of
complaining.
Listen to the person's complaint; if it is
legitimate, set aside group time to solve
the problem. Point out that part of your
work this semester is to learn how to
solve problems. Ask the person to join
with you to improve whatever is disturbing him/her.
Hints for Handling Group Problems
Besides problems with individual team members, the team as a whole may run into some
difficulties. Here are some suggestions for dealing with teams that aren't functioning properly:
Floundering
Groups are often not as productive as they could be especially when people are just
getting to know one another and how each person works. Drawing up a list of tasks to be
accomplished can help. So can saying something like: "What do we need in order to
move forward?" or "Let's see if we can all come to an agreement about what we're trying
to accomplish."
Going Off on Digressions and Tangents
Group members may get caught up in chatting about things not central to the work at hand.
A little of this can be O.K. because it helps to put people in contact with one another. But
if that kind of conversation continues to dominate the group, it can be detrimental to progress.
Things to say include: "Can we go back to where we were a few minutes ago and see
what we were trying to do?"
Making a Decision Too Quickly
Sometimes there is one person in the group who is less patient and more action-oriented
than other group members. This person may reach a decision more quickly than others
and pressure people to move on before it is a good idea to do so. Someone could say:
"Are we all ready to make a decision on this?"
"What needs to be done on this before we can move ahead?"
"Let's check and see where everyone stands on this."
PHY131 Practicals Manual
Teamwork Module
46
Not Making a Decision
The best way to make a decision is by consensus with all team members agreeing on the
decision together. As you are discussing various ideas, try to be open to what each
person is saying. Remember you are trying to come to the best decision for the group as
a whole, not for any one person.
If the team is having trouble reaching consensus, here are some tools to use:
Multivoting--List all the ideas the group has generated. Have each person
vote on his/her top four choices. Choose the three or four ideas that have gotten
the most votes. Identify similarities and differences among the ideas, then
the positive and negative aspects of each. Have each person vote again, this
time for his/her top two choices. Tally the votes to see which idea has the most
support.
Plan A--List all the ideas the group has generated. Each person is given 100
points to allocate among the choices in any way he/she wants to. The alternate
that receives the highest number is the team's choice.
(NOTE: Use Plan A to reach a quick solution when the decision is not very
important. Use Multivoting for more important decisions.)
Feuding Between Group Members
A conflict--either related to a work project or to something outside of the group--can
erupt and impede the group's progress. Usually nothing can be accomplished until the
conflict is resolved. If that is the case, the parties need to discuss the problem, using the
listening techniques that have been discussed.
Ignoring or Ridiculing Others
Subgroups or factions can form in groups with one or more people excluded. Sometimes
the people who are outside of the "in" group will be the subject to criticism or ridicule.
Knowing how to work with people we're not necessarily comfortable with is an ability
that will serve you well in the work world. Each group member must make every effort
to work with every other group member.
The Group Member Who Does Not Do His/Her Share of the Work
A group member may be unwilling to cooperate with others, may not complete assigned
tasks, or may not come to meetings. You should be talk directly with the person to tell
him/her the effect his/her actions are having on the group.
PHY131 Practicals Manual
Teamwork Module
47
Teamwork Activity
Note: you should complete this Activity yourself before the Practical. During the
Practical all members of the Team will discuss their rankings and attempt to come to a
consensus about the three most important characteristics, and the three characteristics that
are most disruptive.
Listed below are 12 characteristics of work teams. Please go through those characteristics
and pick three that you feel are essential for good team performance. Rank them in this
way:
1--most important
2--second most important
3--third most important
Then go through the remaining items on the list and mark the three that you feel most
interfere with team performance. Rank them:
4--most disruptive
5--second most disruptive
6--third most disruptive
_____ 1. Competitiveness among members
_____ 2. Everyone sticks closely to the point
_____ 3. The team avoids conflict
_____ 4. Members rotate the leadership position
_____ 5. Each member gives and receives feedback
_____ 6. A detailed plan is suggested for each team meeting
_____ 7. Each team member is assertive
_____ 8. Informal sub-teams form
_____ 9. Members freely express negative feelings
_____ 10. The overall goals of the team are explicitly set
_____ 11. Information is freely shared among team members
_____ 12. Each person's ideas are taken into consideration and assessed
PHY131 Practicals Manual
Teamwork Module
48
Teamwork Homework
This Assignment should be done by you individually, and turned in via turnitin.com. It
should have a maximum length of three pages (750 words).
There are two objectives to this assignment. One is to give you practice in researching,
writing about, and presenting on a real-world problem, situation, or topic that is more
complex than what you have done in class so far (the task). The second is to give you an
opportunity to observe team dynamics, including your own role in them, so that you can
work more productively within a team (the process). To that end, please structure your
analysis around the following questions.
Individual Behavior Analysis
1. Describe a specific instance in which you or another team member (but please don’t
identify the person by name) did something that furthered progress on either the
task or the process.
2. Describe a specific instance in which you or another team member (but please don’t
identify the person by name) did something that hindered progress on either the
task or the process.
3. Describe one or two ways in which you demonstrated leadership on the team, or ways
in which you intend to demonstrate leadership.
4. Describe a specific instance in which you supported another team member who was
in the leadership position.
5. Describe one or two ways in which you are working to make yourself a more
effective team member.
Team Dynamics Analysis
6. Describe one or two situations in which the team functioned effectively. To what do
do you attribute that positive interaction?
7. Describe one or two situations in which the team functioned poorly. To what
do you attribute those difficulties?
PHY131 Practicals Manual
Teamwork Module
49
8. How does the team make decisions?
9. How does the team assign tasks?
10. Have specific team members taken on specific roles (again, no names, please)?
11. Are there mechanisms in place for team members to alternate roles? If not, how
could that happen?
12. Are there any problems within the team that you want to discuss with your
instructor or TA? (All conversations will be strictly confidential.)
This Module was written by David M. Harrison, Dept. of Physics, Univ. of Toronto in August 2007. It is
largely based on materials developed by Lori Breslow, Director, MIT Teaching and Learning Laboratory
and Senior Lecturer, MIT Sloan School of Management. We thank Dr. Breslow for supplying the originals
or her materials.
Last revision: August 24, 2007
PHY131 Practicals Manual
Teamwork Module
50
Mechanics Module 5
Student Guide
Concepts of this Module
Kinetic, potential, elastic, and total energy
Work
The Activities
Activity 1
Two balls are launched with equal initial speeds along tracks as shown. Friction and air
resistance are negligible.
A. Predict which ball reaches the end of its track first.
B. You may check your prediction with a Flash animation at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/RacingBalls/RacingBalls.html
A similar situation for skiers instead of balls is at:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/RacingSkiers/RacingSkiers.html
Of course, with animations one may program the wrong answer. A video of a real
apparatus is at:
http://www.physics.umd.edu/lecdem/services/demos/demosc2/c2-11.mpg
Was your prediction correct?
C. Qualitatively explain the results of the race using conservation of energy
D. Qualitatively explain the results of the race using forces and accelerations.
PHY131 Practicals Manual
Mechanics Module 5
51
Activity 2
In Mechanics Module 3 Activity 11 you may have whirled a ball on a string in a vertical
circle and noted that the speed of the ball at the bottom of the circle is greater than the
speed at the top. At that time we did not explore why this is so very carefully.
1. Qualitatively explain the difference in the speeds using conservation of energy.
2. Qualitatively explain the difference in the speeds using forces and acceleration.
Activity 3
Three balls are the same height h above
the ground and are fired with the same
initial speeds v0. Ball A is fired straight
up, ball B is fired horizontally, and ball C
is fired straight down. Air resistance is
negligible.
A. Rank the speeds, from the largest
to the smallest, of the three balls
when they hit the ground. Explain.
B. Rank the time, from the largest to
the smallest, it takes the three balls
to hit the ground. Explain.
Activity 4
Joe is standing on the ground, Peter is
standing on a 10 m high cliff, and Amanda
is at the bottom of a 20 m deep pit, as
shown. All three are using coordinate
systems with the vertical axis directed up.
Joe’s coordinate system has the zero of the
vertical axis at ground level.
Peter’s coordinate system has the zero of
the vertical axis at the height of the cliff.
Amanda’s coordinate system has the zero
of the vertical axis at the bottom of the pit.
PHY131 Practicals Manual
Mechanics Module 5
52
A ball of mass m is initially at rest at ground level, Position A above the pit.
A. What is the gravitational potential energy of the ball for Joe, for Peter, and for
Amanda?
B. The ball is then raised to the height of the cliff, Position B, and is held at rest.
What is the gravitational potential energy of the ball at Position B for Joe, for
Peter, and for Amanda?
C. The ball is then released from rest and strikes the ground at the bottom of the pit,
Position C. What is the gravitational potential energy of the ball at Position C for
Joe, for Peter, and for Amanda?
D. What is the speed of the ball at Position C for Joe, for Peter, and for Amanda?
The following is used in Activities 5 - 8
A horizontal spring has an
equilibrium position x0. When
the mass m is at position x0 as
shown the spring exerts no
force on it. When the spring is
either stretched or compressed,
the position of the mass is x
and the force the spring exerts
on the mass is:
F = -k(x – x0)
4.1
We assume an ideal spring and negligible air resistance. If the mass is oscillating, the
mechanical energy is conserved and equal to:
1 2 1
mv k ( x x0 ) 2
2
2
4.2
Activity 5
In the above figure we have chosen a coordinate system that points from the right to the
left.
A. For values of x > x0 does the force point in the +x or the –x direction?
B. For values of 0 < x < x0 does the force point in the +x or the –x direction?
C. For values of x < 0 does the force point in the +x or the –x direction?
PHY131 Practicals Manual
Mechanics Module 5
53
Activity 6
1
k ( x x0 ) 2 is the elastic potential energy of the spring. Explain in your own
2
1
words where the
term comes from. There are at least two ways that you may wish to
2
think about this.
The term
1. In a graph of the force versus the distance, what physical quantity is given by the
area under the graph?
2. What is F dx ?
Activity 7
Now the same spring is suspended vertically. You may wish to note
that the coordinate axis is now labeled y, while in the introduction
above it was labeled x. The position labeled x0 to the right is the
same equilibrium position of the spring as before.
A. If the mass is at position x0, the equilibrium position of the
spring, draw the free body diagram of the forces acting on
the mass.
B. At this position what is the net force acting on the mass?
C. If the mass is at some position y0, the net force on the mass
is zero. Draw the free body diagram of the forces acting on
the mass.
D. What is the expression for y0 in terms of m, g, k, and x0?
E. What is the total vertical force acting on the mass as a
function of k, y, and y0?
F. What is the total mechanical energy when the mass is
oscillating?
Activity 8
Suspend the supplied mass from the supplied spring. Place the Motion Sensor under the
mass with the transducer pointing up so it tracks the position of the mass. Later we will
learn how to describe the distance as a function of time. Here we will begin to explore
oscillatory motion and look at the total mechanical energy of the system.
PHY131 Practicals Manual
Mechanics Module 5
54
Collect distance-time data for the mass when it is vertically
oscillating. Recall that the Motion Sensor can only measure
distances greater than 0.15 m. This means that for the
coordinate system of Activity 7, if the Motion Sensor is at y =
0 the bottom of the mass must always have a value of y >
0.15m.
Set the vertical position of the mass-spring position so
that when the mass is oscillating the minimum distance
from the Motion Sensor is close to but greater than 0.15
m. Try to have the mass moving only up and down.
Set the Motion Sensor for the wide beam. On some
units this is indicated by an icon of a person.
After starting the MotionSensor.vi software, set the
sample rate to about 110 samples per second.
Collect data for just a few oscillations.
Here are some tips for analyzing your data:
It is likely that there will be noise in your values of the distance. These propagate
to even greater noise in the displacement, velocity and acceleration. Use the
cursors in the main Distance-Sample plot to select a reasonably clean set of data
encompassing at least a bit more than half of one complete oscillation. The
velocity-time graph is often particularly useful in determining the “region of
interest” that you wish to keep. Sometimes the data will be so noisy that it is a
good idea to take another set.
The acceleration plot will be particularly noisy. By default this plot displays all of
the values. You can adjust the minimum and maximum values of the plot to show
the main features of the data without showing any noisy values by double-clicking
on the minimum or maximum value of the vertical axis, putting in a new value,
and pressing Return on the keyboard.
Now the Activities:
A. From your data, what is the value of y0?
B. When the mass is at y0, is its speed a maximum or a minimum?
C. What is the value of the speed when the mass is at y0? Try to account for the noise
in the plot by assigning an error to the value.
D. When the mass is at y0, is its acceleration a maximum or a minimum?
E. When the mass is at y0 what is the value of its acceleration? Try to account for the
noise by assigning an error to the value.
F. From your data what is the maximum amplitude of the oscillation? When the
mass is at this position, is its speed a maximum or a minimum?
G. What is the value of the speed when the mass is at its maximum amplitude? What
is the error in this value?
PHY131 Practicals Manual
Mechanics Module 5
55
H. When the mass is at its maximum amplitude is its acceleration a maximum or a
minimum?
I. What is the value and error of the acceleration? What is the value for the spring
constant k and the error in this value?
J. When the mass is at y0 what is the total mechanical energy? When the mass is it
the maximum amplitude of the oscillation what is the total mechanical energy? Is
mechanical energy conserved within errors? Explain.
Activity 9
For an ideal spring-mass system we may write Newton’s 2nd Law as:
F kx ma
(9.1)
If one knows integral calculus then Eqn. 9.1 can be integrated to show that the
mechanical energy Emech is conserved, where:
Emech
1
1
mv 2 kx2
2
2
(9.2)
In fact, integral calculus was invented by Newton (and independently by Leibniz) to do
just this sort of Physics calculation.
Here you will use only the calculus of derivatives to show the relation between these
equations.
Let us assume that the elastic potential energy somehow depends on the spring constant k
and how much the string is stretched from its equilibrium position x. Then is has a form:
d ke x f
(9.3)
where d, e, and f are numbers. Then the mechanical energy is:
Emech
1 2
mv d k e x f
2
You will determine the values of d, e, and f.
PHY131 Practicals Manual
Mechanics Module 5
(9.4)
56
A. If the mechanical energy is conserved what must be the value of
dE mech
? Explain.
dt
dE mech
from Eqn. 9.4, and set the result equal to your answer to Part A.
dt
Compare to Eqn. 9.1 to determine the values of d, e, and f. Is your result
consistent with Eqn. 9.2?
B. Calculate
We see, then, that integration and differentiation are two sides of the same coin.
Mathematicians call this the fundamental theorem of calculus.
Activity 10
In Mechanics Module 2 Activity 9 you determined the angle with the horizontal, , that
the track must make if the cart is to roll down it with constant speed. You will need to use
your data from Module 2 Activity 9 for this Activity.
As the cart rolls down the track is mechanical energy conserved?
If your answer is Yes, explain.
If your answer is No, where did the energy go? How much mechanical energy is lost if
the cart travels 1 m down the track?
Activity 11
Work is a word that is used both in Physics and in everyday life. Although the meanings
of the word in these two contexts are similar, they are not identical. In 5 minutes or less
think of as many uses as you can of the word work in your everyday life that do not
correspond to the Physics definition, and illustrate each by using it in a complete
sentence.
Activity 12
The relation between the s component of a force acting on an object, Fs, and the potential
energy U is:
Fs
dU
ds
(11.1)
Note the minus sign.
On the next page are some other equations from the textbook with minus signs:
PHY131 Practicals Manual
Mechanics Module 5
57
1
( v0 v ) t
2
1
y v0 y t gt 2
2
F1 on 2 F2 on 1
x x0
F kx
W U
Are any of these minus signs conceptually the same as the one that appears in Eqn. 11.1?
Explain.
Activity 13
As you may already know Leibniz, a contemporary and bitter rival of Newton, believed
that the “vis viva” mv2 was the most crucial concept for understanding mechanics.
Newton believed that the momentum m v was the most important quantity.
A. Now, we usually use one-half of the vis viva, ½ mv2, and call it the kinetic energy.
In your own words describe how the factor of one-half arises in the definition of
kinetic energy.
B. Who do you think was right about the most important quantity: Newton or
Leibniz? Why?
Activity 14
A popular toy is part of a hollow rubber sphere that pops
when inverted and dropped. It is often called a “popper.”
Cock the supplied popper a few times. You may find you
need to curl the edges down a bit to get it to stay cocked.
You will be using two Force Sensors in parallel to measure
the force needed to cock the popper. The program that
reads the two Force Sensors and displays their sum is
named ForceSensorsDoubled. For more details see
the Force Sensor manual at:
http://faraday.physics.utoronto.ca/Practicals/Equipment/ForceSensor.pdf
PHY131 Practicals Manual
Mechanics Module 5
58
You will use the supplied “hook” and piece
of Plexiglas with a hole in it as shown. Be
sure to center the popper on the hole in the
Plexiglas, or the popper can get pulled
through the hole when it is cocked.
A. Use the doubled Force Sensors to
estimate the force needed to cock the
popper. Estimate the total work you
need to do to cock it. Where did the
energy go?
B. When placed on the floor some of the poppers uncock themselves almost
immediately and fly straight up into the air. Others need to be dropped onto the
floor from a height of a few centimeters. You do not want to launch it from the
tabletop: it will often hit the ceiling. Determine whether your popper launches
itself spontaneously or needs to be dropped. Repeat a few times, and note how
high above the floor it was dropped from, if applicable, and how high it flies
vertically up into the air.
C. Describe all of the energy transformations that occur as you cock the popper and
then have it fly up into the air. Is the total energy conserved throughout all of
these transformations? Do some rough calculations to justify your answer.
This Student Guide was written by David M. Harrison, Dept. of Physics, Univ. of Toronto, in the Fall of
2008.
Last revision: October 30, 2008.
Activity 3 is from Randall Knight, Student Workbook that accompanies the 1 st edition of Physics for
Scientists and Engineers (Pearson Addison-Wesley, 2004), Section 10.3, Activity 10. Activity 14 is
similar to Priscilla Laws et al., Workshop Physics Activity Guide (John Wiley, 2004), Unit 11, 11.7.
PHY131 Practicals Manual
Mechanics Module 5
59
Mechanics Module 6
Student Guide
Concepts of this Module
Angular Momentum
Rotational Motion
Torque
Moment of Inertia
Rotational Dynamics
Activity 1
The figure on the next page shows four cases of objects in uniform circular motion: A, B,
C, and D. The motion of all four masses are in the horizontal plane. Recall that for an
object of mass m moving with speed v in a circle of radius r the angular momentum L =
mvr.
A. Rank in order from the largest to the smallest the angular momentum L of the four
cases. Explain your reasoning.
B. Recall that for an object in circular motion with radius r and speed v, the angular
v
velocity is defined as: . Call the angular velocity of case A A. Express
r
the angular velocity of cases B, C, and D in terms of A.
C. Now write the angular momentum of the four cases in terms of m, r, and A. Does
this form make it easier or more difficult to rank the angular momenta as in Part
A? Explain.
PHY131 Practicals Manual
Mechanics Module 6
60
Activity 2
The four masses of Activity 1 have been connected to a massless frame that is rotating in
the horizontal plane about the central pivot point, as shown on the next page. The
“spokes” of the frame are rigid.
A. Will the motions of the masses tend to distort the frame in the horizontal plane?
B. What is the total angular momentum of the four masses?
C. What is the moment of inertia of the combined system of four masses?
PHY131 Practicals Manual
Mechanics Module 6
61
Activity 3
Whirl the ball on a string in a horizontal circle, being careful not to hit anybody with it.
Try to maintain the ball at constant speed. You will find it useful to run the string through
the supplied drinking straw and hold the straw in your hand, keeping the string taut with
your other hand. If you make the axis of rotation directly over your head you will be
much less likely to hit yourself in the head with the ball.
A. Was the linear momentum p mv of the ball conserved as the ball moved in
uniform circular motion? Explain.
B. Was the kinetic energy ½ mv2 of the ball conserved as the ball moved in uniform
circular motion?
C. Was the angular momentum of the ball, L = mvr = mr2, conserved as the ball
moved in uniform circular motion?
D. Whirl the ball again in a horizontal circle. Reduce the radius r of the circle to
about ½ r by pulling on the string hanging below your hand. What happened to
the speed of the ball? Did you notice anything about the pull on your hand by the
string? If yes, what?
E. Was the kinetic energy conserved as the radius of the circle was being reduced?
Explain.
F. Was the angular momentum conserved as the radius of the circle was being
reduced? Explain.
G. If the speed of the ball was v when the radius of the circle was r, what was the
speed when the radius of the circle was ½ r? If the magnitude of the angular
velocity of the ball was when the radius of the circle was r, what was its
magnitude when the radius of the circle was ½ r?
PHY131 Practicals Manual
Mechanics Module 6
62
Activity 4
A Flash animation illustrating some of the points of this Activity and the next one is
available at:
http://www.upscale.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/RollingDisc/RollingDisc.html.
A full screen version which is easier for a group of people to see is at:
http://www.upscale.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/RollingDisc/RollingDisc.swf
A bicycle wheel of radius R
rolls to the right without
slipping. The velocity of the
axle of the wheel relative to an
observer standing on the road is
v . At the moment shown in the
figure Point A is in contact
with the road, and Point B is at
the top of the wheel.
A. At the moment shown
what is the
instantaneous velocity
of Point A relative to an
observer standing on
the road?
B. For the person riding on the bicycle, about what point is the wheel rotating? What
are the velocities of Points A and B and the axel at the moment shown in the
figure? What is the angular velocity B of the wheel?
C. For an observer standing on the road, about what point is the wheel rotating? For
this observer what is the angular velocity R of the wheel? What is the
instantaneous velocity of Point B for this observer at the moment shown in the
figure?
PHY131 Practicals Manual
Mechanics Module 6
63
Activity 5
To keep them from slipping off
the tracks, train and streetcar
wheels have a flange, as
shown. The radius of the part
of the wheel in contact with the
rail is R1, and the radius of the
flange is R2. The wheel is
rolling to the right without
slipping. The velocity of the
axle of the wheel for an
observer who is stationary
relative to the track is v . At the
moment shown in the figure
Point A is in contact with the
track and Point C is at the
bottom of the flange. At the
moment shown what is the
velocity of Point C for an observer who is stationary relative to the track? Does this
answer surprise you? Explain.
Activity 6
A. Here is a figure of a yoyo that is in free fall: the
string is not attached to anything and is not shown in
the figure. Draw a free body diagram of the forces
acting on the yoyo. Assume that air resistance in
negligible.
PHY131 Practicals Manual
Mechanics Module 6
64
B. Here is a cross section of a yoyo that is falling with
the end of the string fixed to a support. In Part A,
you could reasonably assume that the yoyo is a point
particle. The free body diagram for this case must
treat the yoyo as an extended body, and where the
forces are exerted on it is important. Draw an
extended free body diagram of the forces acting on
the yoyo.
C. If both yoyos are released at the same time from the
same height do they both fall at the same rate?
Which moves fastest? Confirm your prediction by
dropping the yoyo with and without you holding the
string; catch the yoyo of Part A so it doesn’t get
damaged by colliding with the floor or tabletop.
D. Explain the results of Part C qualitatively using
Newton’s Laws.
E. For the yoyo of Part B, can the force exerted on the yoyo by the string ever do
work on it? Explain the result of Part C qualitatively using conservation of
energy.
Activity 7
A. A uniform meter stick of
length L = 1.0 m has a
0.20 kg mass suspended
by a string from its left
side, and rests on a pivot
that is 0.25 m from the
left side. If the meter
stick is balanced what is
its mass?
B. What is the force exerted on the meter stick by the pivot?
C. Evaluate the total torque exerted on the meter stick about the pivot point. Repeat
for the total torque evaluated about the left side of the meter stick, where the 0.20
kg mass is attached. Repeat for the total torque evaluated about the far right side
of the meter stick. Can you generalize these results to a statement about
evaluating the torque for a body that is in equilibrium? Explain.
PHY131 Practicals Manual
Mechanics Module 6
65
D. The meter stick has been
cut in half. The right half
is attached to a massless
frame that is free to rotate
about the pivot. The 0.20
kg mass is suspended
from the left side of the
frame 0.25 m from the
pivot. Are the half meter
stick, frame and mass balanced?. What is the mass of the half meter stick? Is your
answer consistent with that mass of the full meter stick of Part A? Explain.
E. The full meter stick and
0.20 kg mass is tilted, held
at rest, and gently
released. What will be its
motion? Explain.
Activity 8
A. A yoyo sits on the tabletop, and
is gently pulled to the right by
the horizontal string, which is
wound about the axel as shown
in the cross-section view. The
pull is gentle enough that the
yoyo does not slip. Predict the
motion of the yoyo. Using the
supplied yoyo, confirm your
prediction.
PHY131 Practicals Manual
Mechanics Module 6
66
B. A yoyo sits on the tabletop, and
is gently pulled to the right by
the horizontal string, which is
wound about the axel as shown
in the cross-section view: note
that now the string is attached
to the bottom of the axel. The
pull is gentle enough that the
yoyo does not slip. Predict the
motion of the yoyo. Using the
supplied yoyo, confirm your
prediction.
C. Explain the results of Parts A and B. Assume that the radius of the axel of the
yoyo is r, and the radius of the yoyo itself is R. What are the total torques acting
on the yoyo about its axis of rotation for Parts A and B?
D. Suppose that in the arrangement of Part B the string is not horizontal, but instead
pulls the yoyo to the right and up. As the angle of the string is increased predict
what will happen. Test your prediction. Can you explain?
Activity 9
A dumbbell consists of two masses m and 2m separated
by a distance d by a massless rod. The dumbbell rests
on a frictionless horizontal table, and a force F is
pulling mass m to the right. In the figure we are
looking down at the dumbbell from above
A. Are there one or more forces that can be
applied to the dumbbell that will cause it to
move with only translational motion, without
any rotation? If yes what is/are those forces,
magnitude, direction, and applied to what part
of the dumbbell? If not, explain.
B. In addition to the force shown in the figure are there one or more forces that can
be applied to the dumbbell that will cause it to move with only constant
translational speed, without any rotation or acceleration? If yes what is/are those
forces, magnitude, direction, and applied to what part of the dumbbell? If not,
explain.
PHY131 Practicals Manual
Mechanics Module 6
67
Activity 10
Two uniform cylinders are made of the same
material, have the same thickness, and are
rotating about their axes of symmetry.
Cylinder B has twice the radius of Cylinder
A. Recall that the moment of inertia of a
cylinder of mass M and radius R that is
rotating about its axis of symmetry is
1
I MR 2 .
2
a) If the two cylinders are to have the same angular momentum, what must be the
relation between their angular speeds ωA and ωB?
b) If the two cylinders are to have the same rotational kinetic energy, what must be
the relation between their angular speeds ωA and ωB?
Activity 11
You are driving a screw into a piece of wood.
In addition to the screw’s rotation it moves
down into the wood. What is the relation
between the direction of the angular momentum
vector of the turning screw and the direction it
is moving into the wood?
PHY131 Practicals Manual
Mechanics Module 6
68
Activity 12
A gyroscope is spinning as shown.
A. What is the direction of the angular
momentum vector of the gyroscope?
B. What is the direction of the torque being exerted on the gyroscope?
C. From your answer to Part B what can you conclude about the magnitude of the
vertical component of the angular momentum as the motion proceeds?
D. If the gyroscope were not spinning, what would the torque you found in Part B
cause the gyroscope to do?
E. If the spinning gyroscope did what you predicted in Part D what would happen to
the vertical component of the angular momentum? Is this possible?
F. Now predict the direction of precession of the gyroscope. Check your prediction
with the supplied gyroscope.
G. Now the gyroscope is rotating in the
opposite direction. Repeat Parts A – F.
This guide was written in May 2008 by David M. Harrison, Dept. of Physics, Univ. of Toronto
Last revision: November 6, 2008.
PHY131 Practicals Manual
Mechanics Module 6
69
Oscillations Module
Student Guide
Concepts of this Module
Periodic and simple harmonic motion.
Simple harmonic motion as one component of uniform circular motion.
Pendulums when the small angle approximation is not valid.
Double pendulums, spring-mass systems with an oscillating support point, and
chaotic systems.
The Activities
Activity 1
Here is the URL of a Flash animation of two systems executing harmonic motion.
http://www.upscale.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/SHM/TwoSHM.html
The above link is to a fixed size animation which works nicely if only one person it
viewing it. For use in the Practical itself a version which can be resized to be larger so
that the entire Team can see it is better. Here is a link to such a version:
http://www.upscale.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/SHM/TwoSHM.swf
Open the animation. In your own words describe which characteristics of these two
systems are the same. In your own words describe what is different for these two systems.
Activity 2
Here is the URL of a Flash animation comparing uniform circular motion to simple
harmonic motion:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/Circular2SHM/Circular2SHM.html
The above link is to a fixed size animation which works nicely if only one person it
viewing it. For use in the Practical itself a version which can be resized to be larger so
that the entire Team can see it is better. Here is a link to such a version:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/Circular2SHM/Circular2SHM.swf
PHY131 Practicals Manual
Oscillations Module
70
Open and run the animation.
A. For an object in uniform circular motion, the angle as a function of time changes
according to:
=t
where is called the angular velocity. What are the units of ?
B. For an object in uniform circular motion, the y coordinate of a point on the object
changes as a function of time according to:
y = r sin(t)
What is the meaning of r? What are its units?
C. An object executing Simple Harmonic Motion is described by:
y = r sin(t)
Note that this is the same equation as in Part B. However in this case is called
the angular frequency. In this case what are the units of ? In your own words
explain why two somewhat different names are used for the same symbol . For
Simple Harmonic Motion what name is usually used for r? What are the units of
r?
Activity 3
A. Here is a plot of the position versus
time for a particle. Does the motion
appear to be periodic? Does the
motion appear to be Simple
Harmonic? What is the period of
the motion? What is the frequency
of the motion?
PHY131 Practicals Manual
Oscillations Module
71
B. Here is another position versus time plot. For values of the time between 0 and 8 s
it is identical to Part A. Does this motion appear to be periodic? For the particle of
Part A, if you only have data for times between 0 and 8 s can you tell the
difference between that motion and the motion shown here?
C. Here is another plot of the
position versus time for a
particle. Does the motion appear
to be periodic? Does the motion
appear to be Simple Harmonic?
What is the period of the
motion? What is the frequency
of the motion? What is the
angular frequency of the
motion?
D. Does it make sense to talk about the angular frequency of the motion of Part A?
Explain.
Activity 4
Mount the supplied spring on the support and hang the supplied
mass from it. Position the Motion Sensor under the mass and
pointing up at it, as shown. You will connect the Motion Sensor
to the U of T DAQ Device. You may have used this same setup
in Mechanics Module 5 Activity 8.
Recall that the Motion Sensor can only measure distances
greater than 0.15 m. This means that for the given coordinate
system, if the Motion Sensor is at x = 0 the bottom of the mass
must always have a value of x > 0.15m.
PHY131 Practicals Manual
Oscillations Module
72
Set the vertical position of the mass-spring position so that when the mass is
oscillating the minimum distance from the Motion Sensor is close to but greater
than 0.15 m. Try to have the mass moving only up and down.
Set the Motion Sensor for the wide beam. On some units this is indicated by an icon
of a person.
After starting the MotionSensor.vi software, set the sample rate to about 110 samples
per second.
Collect data for a few oscillations.
Now the Activities:
Does the motion appear to be Simple Harmonic? What is the period, frequency,
angular frequency, and amplitude of the motion?
What physical characteristics must the spring-mass system have for the motion to be
truly Simple Harmonic and not just approximately so? Do you think this springmass system has those characteristics?
Activity 5
In Activity 4 a Motion Sensor is used to measure the position versus time for a mass
oscillating on a spring. We took about 110 samples every second and, depending on the
particular spring and mass used the period of the oscillation was about 0.5 s.
Imagine we have an ideal spring-mass system oscillating with maximum amplitude = 1 m
and angular frequency = 6 s-1. The motion is:
y A sin( t ) sin( 6 t )
A. What is the period of the oscillation?
B. Imagine we use a Motion Sensor to measure the position once per second and take
the first measurement at t = 0 s. Remember that in the above formula the
argument to the sine function is in radians. What will be the measured values of y
for the first few measurements? Is your results reasonable? Explain. You may find
it helpful to draw a rough sketch of y versus t for a few periods of the oscillation
and locate on the graph the points where you would have measured the values of
y.
PHY131 Practicals Manual
Oscillations Module
73
Activity 6
The figure shows the potential
energy of a particle oscillating
on a spring. Note that the
horizontal axis has units of
cm.
What is the spring’s
equilibrium length?
What is the value of
the spring constant k?
The turning points of the
particle are at 10 cm
and 30 cm. What is the maximum amplitude of the particle’s motion? What is the
particle’s maximum kinetic energy?
Sketch a graph of the particle’s kinetic energy as a function of x. What is the shape of
the sketch?
The particle has a mass of 2.0 kg. What is the particle’s maximum speed? Sketch a
graph of the particle’s speed as a function of x. What is the shape of the sketch?
If the total energy of the particle is tripled, what will be the value of the maximum
speed of the particle?
If the total energy of the particle of Parts A - D is tripled, what will be its maximum
amplitude?
Activity 7
A block of mass M is attached to a
spring of spring constant k, and
oscillates back and forth with
amplitude A on a frictionless surface.
At the moment shown the block is at
its maximum amplitude and a lump of
putty of mass m is dropped from a
very small height and sticks to the block. The mass of the spring is negligible.
What are the new amplitude and frequency of the block plus putty system?
PHY131 Practicals Manual
Oscillations Module
74
Activity 8
A vertical massless spring with spring constant
k has a platform of mass M fixed to it. A mass
m is sitting on top of the platform, but is not
fixed to it. The two masses are oscillating
vertically with amplitude A. There is a vertical
position, the equilibrium point, where the total
force acting on the two masses as a single
system, their weight plus the force exerted by
the spring, is zero.
Imagine that the oscillation is so extreme
that the mass m just loses contact with
the platform. Where is this going to
occur and why?
What is the value of A when for which the
mass m just loses contact with the
platform?
So far, except for Activities 3A and 3B, all the motions we have investigated were at least
approximately Simple Harmonic. In Activities 9 and 10 we will explore two pendulums
for which the deviations from Simple Harmonic are not negligible. For both we
concentrate on the how the period of the pendulum varies with the maximum amplitude.
Newton’s Laws for a simple pendulum of length L gives us a differential equation:
d 2 g
sin 0
dt 2 L
(1)
In classes and the textbook, we almost always restrict ourselves to the case where the
angle is always small, so that we can approximate that:
sin
(2)
where is in radians. Then we can approximate Eqn (1) as:
d 2 g
0
dt 2 L
PHY131 Practicals Manual
(3)
Oscillations Module
75
Except for the differences in symbols, this is the same equation as for a spring mass
system:
d 2x k
x0
dt 2 m
(4)
You may have studied how to do an approximation of this system in the Numerical
Approximation Module.
The solution to Eqn (3) is simple harmonic motion with a maximum amplitude max and
period:
T0 2
L
g
(5)
The reason why we usually approximate Eqn (1) with Eqn (3) is that an exact analytical
solution of Eqn (1) does not exist!
With considerable effort and sophisticated mathematics, from Eqn (1) one can determine
that the period of the pendulum with a maximum amplitude of max is given by:
max
T
T0
0
2
d
cos cos max
(6)
This is not terribly helpful, since the integral involves elliptical integrals which are not
analytically solvable either, so one must either numerically approximate to find the value
of T or look up the integral in some table. These sorts of integrals are so common that
considerable effort has been expended to develop computer algorithms that are fast and
accurate. Table 1 gives some values of T/T0.2
Table 1
max (rads)
0.01000
0.10000
/4
/2
T/T0
1.00001
1.00063
1.03997
1.18034
1.32890
2.57123
∞
There are a few ways to avoid becoming mired in all the mathematics:
2
These values were calculated with Mathematica.
PHY131 Practicals Manual
Oscillations Module
76
1. Use numerical approximation.
2. Build and measure a real pendulum.
3. Do even more mathematics to simplify Eqn (6) into an approximate form that can
be solved with a simple calculator.
In Activity 9 we will use numerical approximation, and Activity 10 we will use a real
pendulum. If you wish to see the sort of gyrations necessary to get a formula that can be
solved with a calculator, see for example F.M.S. Lima and P. Arun, “An accurate formula
for the period of a simple pendulum oscillating beyond the small angle regime”,
American Journal of Physics 74(10), 892 – 895 (2006),
http://scitation.aip.org/getabs/servlet/GetabsServlet?prog=normal&id=AJPIAS00007400001000089200000
1&idtype=cvips&gifs=yes.
Activity 9
Here are some values of the period of a simple pendulum for a length L = 1.0000 m
taking g = 9.8000 m/s2 using Eqn. 5 and the values of Table 1.
Table 2
max (rads)
0.01000
0.10000
/4
/2
T (s)
2.00710
2.00835
2.08732
2.36905
2.66723
5.16070
∞
A listing of the code for Pendulum.py appears in Appendix 1. We assume that the
mass is connected to the support by a massless rigid rod. The algorithm used to
approximate this system is very similar to the one used for the spring-mass system
investigated in the Numerical Approximation Module. Examine the code and
describe in your own words how the algorithm approximates the motion of the
pendulum.
The code also estimates the period of the oscillation. Describe in your own words
how the estimation is done.
The “master” copy of Pendulum.py is located at:
Feynman:Public/Modules/Oscillations
PHY131 Practicals Manual
Oscillations Module
77
Copy the file to your Team’s area on the server. Start the IDLE for VPython
program and open the copy of Pendulum.py. Use Run / Run Module or
press the F5 key on your keyboard to start the animation. How does the estimated
value of the period compare to the value in Table 1? Can you think of a better way
to determine the period of the simulation?
Modify the code so that when the animation starts it prints the maximum amplitude
and the timestep of the approximation. Test your changes to make sure that they
work. You will wish to know that when you change the code and run the
animation VPython will over-write the file with the new version.
A tip: when you start the animation, two windows are opened, a Python Shell
which shows the results of all print statements in the code and a window of the
animation. To stop the animation close the animation window, but leave the
Python Shell window open. This will be useful for Part E.
Does the numerical approximation agree with the values of Table 2? How does the
approximation do for different values of the timestep? You may wish to print the
window of the data for the estimated periods for various maximum amplitudes
and timesteps and staple it into your lab book.
Activity 10
For a real pendulum, things are not quite so simple. In
the figure we show a real pendulum. The distance
between the pivot point and the centre of mass is L, the
moment of inertia of the object about the pivot is I, and
the total mass of the object is m. Often this is called a
physical pendulum.
Using the usual convention that positive torques cause counter-clockwise rotations, the
torque exerted on the pendulum is:
mgL sin
(7)
Newton’s 2nd Law for rotational motion is:
d 2 1
I
dt 2
(8)
Thus, the equation of motion is:
PHY131 Practicals Manual
Oscillations Module
78
d 2 mgL
sin 0
I
dt 2
(9)
Note that except for differences in the symbols this has the same mathematical structure
as Eqn (1) for a simple pendulum. Therefore within symbol changes the solution is also
the same. In particular, in the small angle approximation the motion is simple harmonic
and the period of oscillation is:
T0 2
I
mgL
(10)
Similarly, for oscillations where the maximum amplitude is not small Eqn (6) is also true:
max
T
T0
0
2
d
cos cos max
(11)
Therefore the ratios of T/T0 from Table 1 are also true for this case.
Here you will side-step trying to solve Eqn (11) by taking data on how the period of a
real physical pendulum varies with its maximum amplitude. You will use a Pasco Rotary
Motion Sensor, the U of T Data Acquisition Device (DAQ), and the RMS program. The
RMS program is based on the SignalExpress software platform from National
Instruments.
The Rotary Motion Sensor is mounted on a support, and has a rod with a mass on it
mounted on it. The rod and mass will be the physical pendulum you will study. Also part
of the rotating system are the plastic disc on which the rod is mounted and the axel
connected to the Rotary Motion Sensor.
Setup
There are two phone plugs on cables connected to the Rotary Motion Sensor. These are
plugged into the corresponding terminals on the Data Acquisition Device. On the left side
of the Device are two pairs of terminals labeled Digital Channels; each pair has one
labeled with a yellow circle and the other with a black circle. The corresponding yellow
and black plugs from the sensor are plugged into pair labeled 0, yellow to yellow and
black to black.
When you start RMS the position of the Rotary Motion Sensor defines the angle to be
zero. Make sure that the pendulum is stationary and start RMS.
PHY131 Practicals Manual
Oscillations Module
79
Occasionally the hardware and software gets confused about the resolution of the
measurement.
1. Rotate the pendulum by one full rotation. The angle on the graph should read 6.28
radians (= 360º) either a positive or negative number.
2. If the angle is not correct, disconnect the Rotary Motion Sensor from the DAQ the
plug it back in.
3. Stop and restart the RMS program and check that one full rotation reads 6.28
radians.
4. Stop RMS.
Trial Run
It is a good idea to do a trial run first. You should do a run with a maximum
amplitude max 1 radian .
Make sure the pendulum is stationary.
Start RMS.
Rotate the pendulum to some about 1 radian. You can read the angle on the graph.
Release the pendulum. The graph will show the angle of the pendulum as a function
of time.
After about 10 oscillations stop RMS.
Right click on the graph. Choose Visible Items / Cursors.
Drag the solid cursor to one of the early oscillations. The horizontal line of the cursor
will track the data.
Drag the dotted cursor to one of the later oscillations.
At the bottom of the graph the Dx field is the time between the two cursors. y1 and
y2 are the angles of the first and second cursors respectively, in radians, and Dy
is the change in the angle.
Thus you may calculate the value of the period and the maximum amplitude.
Note: due to a mis-feature of SignalExpress, sometimes when you take another
data set it is difficult to use the cursors. To fix, turn the cursors off and then back
on using Visible Items / Cursors.
There are some issues that should be considered:
A. The time resolution of the software is 0.05 s. You can confirm this by moving one
of the cursors the minimum possible amount and seeing how much the value of
the time changes. Considering that the measured value of the time when the
pendulum is at maximum amplitude is unlikely to be the exact value when it
actually occurred, a reasonable value for the error in the measurement of the time
t is perhaps ± 0.03 s. Is this a reasonable estimate? If yes, explain why in your
own words. If no, what is a more reasonable value?
PHY131 Practicals Manual
Oscillations Module
80
B. If you position the cursors at successive maximum values of the amplitude, then
the time between them is the period T of oscillation. What is a reasonable estimate
of the uncertainty in the period, T?
C. Say you position the cursors for n oscillations. Call the final value of the time tf
and the initial value ti. The software shows the value of tf - ti as Dx at the bottom
of the window. The value of period is T = Dx/n. Now what is the uncertainty in
the period, T? Is this a better way to determine the period?
D. Since this is not a perfect frictionless system, the maximum amplitude decreases
with time. You can see this in your data. Thus the value of max is not well
defined. What is a reasonable estimate of the error in its value? Why? How does
the value depend on the number of oscillations between the cursors?
E. Considering the results of Part C and Part D, how many oscillations should you
use to determine the values of the period for a given maximum amplitude? Note
that there is a trade-off: increasing the number of oscillations n reduces the error
in the period but increases the error in the maximum amplitude. Explain your
choice.
Data Collection and Analysis
Collect data for the period for a number of values of the maximum amplitude.
Use CreateDataSet to create a dataset of values for the period and maximum amplitude,
including their errors, and save it into your Team’s area. You will want the values of the
maximum amplitude to be the Independent (x) Variable, and the values of the period be
the Dependent (y) Variable.
You can then use ViewDataSet to view your data. You may wish to print the window and
staple it into your lab book.
Does the data look reasonable? Does it appear to be consistent with the values of Table
1?
Parameterising the Data
You have determined the period of the pendulum for measured values of the maximum
amplitude. Here we explore how to use that data to determine the value of the period for
maximum amplitudes that have not been measured.
The relation between the period and the maximum amplitude is a complicated function f()
involving elliptical integrals:
max
T f ( max )
d
T0
cos cos max
2
0
PHY131 Practicals Manual
Oscillations Module
(12)
81
However, it might be reasonable to approximate the function as a polynomial:
T a(0) a(1) max a(2) max a(3) max a(4) max ...
2
3
4
(13)
Can you eliminate the odd coefficients a(1), a(3), etc. from the series using a physical
argument? If yes, what argument can you use?
Use the PolynomialFit program to find the best fit the data. Do not include any terms
that are physically unreasonable. You will find that adding some terms to the
polynomial will not improve the quality of the fit: your goal is to find the
minimum number of terms in the polynomial that provides a good fit to the data.
Any fitted parameters a(i) that are zero within errors should not be included in the
fit.
From the best fit, what is the value of T0?
How well does the best fit do in duplicating the values of Table 1? Does it do a better
job for small angles than for large ones?
Activities 9 and 10 were concerned with pendulums whose motion was approximately
but not exactly Simple Harmonic. In Activities 11 and 12 we will investigate some
periodic systems whose motion is not even close to being Simple Harmonic. Both
Activities are only brief looks at the two systems, and are just for your interest.
Both systems that are investigated are chaotic. Here are some characteristics that all
chaotic systems have:
No analytic formula can even approximate the motion.
The motion will never repeat. Ever!
If two identical periodic systems are started with almost identical positions and
speeds, soon their motions will be radically different from each other.
Chaotic systems are deterministic. If they start with exactly identical initial conditions
their subsequent behavior will be exactly the same.
Characteristic 3 is sometimes called the butterfly effect. This is because if history were a
chaotic system then the outcome of World War II could have been determined by
whether or not a butterfly landed on a particular flower in the Himalaya Mountains in
1848. You may learn more about chaotic systems from:
http://www.upscale.utoronto.ca/PVB/Harrison/Chaos/Chaos.html
PHY131 Practicals Manual
Oscillations Module
82
Activity 11
Our first example of a non-harmonic pendulum is the double pendulum. It is an example
of a chaotic system.
Start the IDLE for VPython program. Use File / Open … to open the
doublependulum.py program in the examples directory; this directory is the
default one that is opened when IDLE is first started. Run the program. You are
welcome to look at the code for this program, but will wish to know that it is written in
terms of a sophisticated form of Newton’s Laws called a Lagrangian formulation.
You may investigate the double pendulum further with a Java applet by Peter Selinger at
Dalhousie University, Halifax Nova Scotia:
http://www.mscs.dal.ca/~selinger/lagrange/doublependulum.html
From the trace of the trajectory you can see characteristic #2 above illustrated. By
clicking on the Restart button you can see characteristic #4 demonstrated.
Activity 12
In Activity 4 you may have used a Motion Sensor to track the position of a mass
oscillating up and down on a spring. If the support of the spring is oscillating up and
down, for some frequencies and amplitudes of oscillation this system too is chaotic.
FEED ME.
This Student Guide was written by David M. Harrison, Dept. of Physics, Univ. of Toronto in May 2008
Last revision: November 8, 2008.
Activity 3.A is based on Activity 14.1 Part 3 of Randall D. Knight, Student Workbook with Modern
Physics (Pearson Addison-Wesley, 2008). Activity 6 is based on Activities 1.43 Parts 10, 11, and 12 of
Knight’s Student Workbook. Activities 7 are 8 are from David Harrison and William Ellis, Student
Activity Workbook, 3rd ed. (Norton, 2008), Activities 15.8, 15.9.
PHY131 Practicals Manual
Oscillations Module
83
Appendix 1 – Listing of Pendulum.py
# Solve the pendulum using numerical approximation
# Copyright (c) 2008 David M. Harrison
# The next line is an internal revision control id:
# $Date: 2008/05/10 10:33:45 $, $Revision: 1.1 $
# Import the visual library
from visual import *
# The initial angle in radians.
theta = pi/2.0
# The initial angular velocity
omega = 0
# Set g and the length of the pendulum
g = 9.80
L = 1.00
# These four lines control the size of the window of
# the animation and the scale. The details of these lines
# are not important for our purposes.
scene.autoscale = 0
scene.height = 600
scene.width = 600
scene.range = vector(2.0,2.0,2.0)
#
# Now we build the pendulum which we will animate.
#
# The support for the pendulum
support = cylinder( pos = (0, 0, -0.5), axis = (0,0,1), radius = 0.02)
# The "frame" construct groups two or more objects into a single one.
# Here we group the cylinder and the sphere into a single object
# which is the pendulum.
pendulum = frame()
cylinder(frame=pendulum, pos=(0,0,0), radius=0.01, length=1,
color=color.cyan)
sphere(frame=pendulum, pos=(1,0,0), radius=0.1, color=color.red)
# Position the pendulum.
pendulum.pos = (0,0,0)
# Rotate the pendulum about the z axis. Note that VPython measures
# angles with respect to the x (horizontal) axis. We are measuring
# angles with respect to the vertical (-y axis) so we subtract
# pi/2.0 radians from the angle.
pendulum.rotate(axis = (0,0,1), angle = theta - pi/2.0)
# The time
t = 0.
PHY131 Practicals Manual
Oscillations Module
84
# Below we will want to store the old value of the time.
# Set it the "impossible" value of -1 initially.
t_old = -1.
# The time step
dt = 0.0005
# The value "1" is equivalent to true. So this causes the while
# loop to run forever.
while 1:
# Set the rate of the animation in frames per second
rate(1/dt)
# The angular acceleration, i.e. the second derivative of the
# angle with respect to time.
alpha = -(g/L) * sin(theta)
# The new value of the angular velocity
omega = omega + alpha * dt
# The change in the angle of the pendulum
d_theta = omega * dt
# A rough and ready way to estimate the period of the oscillation.
# It the angle is positive and adding d_theta to it will make
# it negative, then it is going through the vertical
# from right to left.
if(theta > 0 and theta + d_theta < 0) :
# If t_old is > 0, then this is not the first cycle of
# the oscillation. The difference between t and t_old
# is the period within the resolution of the time step dt
# and rounding errors. Print the period.
if(t_old > 0):
print "Estimated Period =", t - t_old, "s"
# Store the current value of the time in t_old
t_old = t
# Rotate the pendulum about the z axis by the change in the angle
pendulum.rotate(axis = (0,0,1), angle = d_theta)
# Update the value of the angle
theta = theta + d_theta
# Update the time
t = t + dt
PHY131 Practicals Manual
Oscillations Module
85
Numerical Approximation Module
Student Guide
Concepts of this Module
Introduction to the Python programming language.
Numerical approximation as an alternative to analytic solutions.
Introducing Python
Here we briefly introduce the Python language and some of the programming constructs
that will be used in the main part of this Module.
The Python programming language is free and open source, with a huge community of
developers. Although it is an ideal first language to learn, you may wish to know that it is
not a “toy”. It is used extensively by Google, NASA, the Large Hadron Collider just
being lit up in Switzerland, Youtube, Air Canada, and many more.
Traditionally the first computer program simply prints hello, world. Here is a complete
Python program that does this:
print "hello, world"
Here is another complete program that also prints hello, world:
what = "world"
print "hello,", what
The first line of this program assigns world to a variable named what. The next line then
prints hello, followed by whatever the variable named what is set to, world in this case.
The Python interpreter executes the lines of this “program” in order.
Today we will wish to have Python execute some lines of the program over and over
again. We will use a while loop to do this. This loop has the form:
while something_is_true:
execute this line of the program
then execute this line of the program
then execute this next line of the program
After executing the third line after the while statement, it goes back to the while
statement: if something is still true then it executes the following lines again, and so on.
PHY131 Practicals Manual
Numerical Approximation Module
86
We have prepared a program named LoopDemo.py which demonstrates this loop. Here
is a listing of the program.
Listing of LoopDemo.py
# All lines like this one that begin with a "#"
# are comments. All other non-blank lines are
# program statements.
# Set a variable named "x" to a value of 0
x = 0
while x < 3:
print x
# Increase the value of x by one.
x = x + 1
# End of the while loop. Go back to
# the while statement again.
You may wish to know that the lines following the while statement must be indented as
shown.
Start the IDLE for VPython program. Use File / Open … to open the file
LoopDemo.py which is located in Feynman:Public/Modules/NumerApprox
folder.
Predict what will happen when this program is run.
Check your prediction by running the program: use Run / Run Module or press the F5
key on your keyboard.
Sometimes we wish to use a while statement to have the program execute the same
lines over and over until it is manually stopped. The LoopDemo2.py file in the same
directory does exactly this. A listing of this program is in Appendix 1.
Predict what will happen when this program is run.
Check your prediction by running it.
Also in the Feynman:Public/Modules/NumerApprox folder is the file
LoopDemo3.py, and a code listing is in Appendix 2. It differs from LoopDemo2.py
in two ways:
1. The first print t statement is removed.
2. Inside the while loop the two statements that increment the value of the time
and prints the value of the time are reversed.
PHY131 Practicals Manual
Numerical Approximation Module
87
Predict what will happen when this version is run. Check your prediction by opening the
file and running it.
The Spring-Mass System and Numerical Approximation
For a mass m on a spring with spring constant k Newton’s Second Law is:
F ma
kx m
d 2x
dt 2
(1)
This is a second-order differential equation, and if one knows enough calculus one can
solve it to get:
x ampl sin( t )
(2)
where:
k
m
But if one doesn’t know enough calculus or just doesn’t want to bother with a differential
equation, a moderately powerful computer provides a nice alternative. The basic idea is
that we will start with the mass at some known position and calculate its acceleration,
how fast it is moving and where it will be small timestep t later, and keep doing this
over and over again. Here is how one may do this numerical approximation:
1. From the mass’ current position x we can calculate the acceleration a of the mass:
k
a x
m
2. If the speed of the mass is v, then calculate a new speed vnew = v + a t.
3. If the position of the mass is x, calculate a new position xnew = x + vnew t.
4. Go back to Step 1 and repeat.
Of course, this method is just an approximation. However given a sufficiently powerful
computer to do the calculations we can make the approximation as close to correct as we
wish by making the timestep t sufficiently small.
We have prepared a Visual Python (VPython3) animation which both uses Eqn. 2 and
implements the numerical approximation described above.
3
VPython is free, open source, and available for Windoze, Mac, Linux and UNIX from
http://www.vpython.org/.
PHY131 Practicals Manual
Numerical Approximation Module
88
The Activity
A. Open the IDLE for VPython program. Use File / Open … to open the file
SHM.py which is located in Feynman:Public/Modules/NumerApprox.
Use Run / Run Module or press the F5 key on your keyboard to start the
animation. The upper yellow sphere uses Eqn. 2, and the lower green sphere uses
the numerical approximation. Can you see any differences between the motions of
the two spheres? For fun you may wish to know that:
Holding down the right mouse button and moving the mouse allows you to
rotate the view of the animation.
Holding down both mouse buttons and moving the mouse up or down
allows you to zoom in and out on the animation.
B. For your convenience a listing of the SHM.py code is included in Appendix 3 of
this document. In the Feynman:Public/Modules/NumerApprox folder the
file CodeBig.pdf also lists the code using big fonts; you may wish to print this
file and place the pages on the whiteboard using small magnets. Including empty
lines there are 90 lines in the file. How many of them are program statements?
C. Some lines of the code are used only for the animation of the yellow ball; some
lines are only for the animation of the green ball; some lines are shared for the
animations of both balls; still other lines are commands to control the animation
speed, set up the calculation loop, or set the “stage” for the animation. Circle or
use a highlighter on all the lines in the code that are used only for the animation of
the yellow sphere and label them with Y; if a yellow highlighter is available it
would be a good choice for this.
D. Preferably using a different color pen or highlighter, circle or highlight all the
lines in the code that are used for the animation of both spheres and label them
with B.
E. Describe in your own words how the program animates the motion of the yellow
ball.
F. From the parameter values set in the code calculate the period T of the oscillation.
Does your calculated value match the actual period you see in the animations?
G. About 60% down the code listing the maximum amplitude of the motion ampl is
calculated. Did you circle this in Part C? If not, should you have? Is the
calculation correct? (Hint: think about conservation of energy.)
H. Preferably using a third color pen or highlighter circle or highlight all the lines in
the code that are used only for the animation of the green sphere and label them
with G; a green highlighter would be ideal if available. Circle or highlight all the
lines that control the animation speed, set up the calculation loop, or set the
“stage” for the animation, and label them with C; a fourth color pen or highlighter
would be nice if possible. Follow the code for all the lines that are used for the
PHY131 Practicals Manual
Numerical Approximation Module
89
animation of the green sphere. Does it surprise you that nowhere in these lines of
code does a trig function appear? Explain.
I. In the code for the yellow ball, the value of the time is incremented and then the
new position of the ball is calculated. Is this correct? What if those two lines were
reversed?
At the end of this Module, you will want to staple your “de-constructed” code into your
lab book.
For the Keen
Here are some things you may wish to do. They are not intended to be part of the Activity
of this Practical, but instead some things you may wish to explore on your own.
Some systems, particularly chaotic ones, are not analytically solvable: there is no
equation that describes the motion. For such systems numerical approximation is the only
way that they may be studied. When VPython first starts, using the File / Open …
command lists the examples that are shipped with the software. The
doublependulum.py program in that directory is an example of a chaotic system
which is not analytically solvable but here is solved by numerical approximation. The
physics behind this animation is fairly formidable, but the basic idea is the same as the
SHM.py code you used here. There are many other interesting examples that are shipped
with the software.
You may also save a copy of the SHM.py file and try modifying it by changing some of
the parameters set in the code. You will want to know that by default every time you run
the program VPython first saves the code into the file. Thus you may wish to consider
working on a copy of the master file, named perhaps SHM_work.py.
One simple change you could make to SHM.py involves efficiency. As written
determining the yellow sphere’s position involves calculating the angular velocity
sqrt(k/mass) for every iteration of the loop. Calculating the value once before
entering the loop and then using the calculated value would mean that the program has to
perform many less calculations.
PHY131 Practicals Manual
Numerical Approximation Module
90
Appendix 1 – LoopDemo2.py Code Listing
# All lines like this one that begin with a "#" are
# comments. All other non-blank lines are program
# statements.
# Import the visual library.
from visual import *
# Set the time
t = 0
# Set the timestep
dt = 1
# Print the current value of the time
print t
# The next line causes the indented lines that follow
# it to be repeatedly executed in the loop. The construct:
#
1==1
# means "is one is equal to one?" which is always true.
# Thus double equal signs like this mean something different
# than a single equal sign, such as is used above to set the
# values of the time and the timestep.
while 1==1:
# Do one calculation every second
rate(1)
# Increment the value of the time and print the result.
# Here the single equal sign means set the value of t to
# whatever appears to the right of the equal sign.
t = t + dt
print t
# End of the while loop. Go back to the rate(1) statement
# and start over.
PHY131 Practicals Manual
Numerical Approximation Module
91
Appendix 2 – LoopDemo3.py Code Listing
# All lines like this one that begin with a "#" are comments.
# All other non-blank lines are program statements.
# Import the visual library.
from visual import *
# Set the time
t = 0
# Set the timestep
dt = 1
# The next line causes the indented lines that follow
# it to be repeatedly executed in the loop. The construct:
#
1==1
# means "is one is equal to one?" which is always true.
# Thus double equal signs like this mean something different
# than a single equal sign, such as is used above to set the
# values of the time and the timestep.
while 1==1:
# Do one calculation every second
rate(1)
# Print the time and then increment its value.
# Here the single equal sign means set the value of t to
# whatever appears to the right of the equal sign.
print t
t = t + dt
# End of the while loop. Go back to the rate(1) statement and
# start over.
PHY131 Practicals Manual
Numerical Approximation Module
92
Appendix 3 – SHM.py Code Listing
# All lines like this one that begin with "#" are comments.
# All other lines are program statements.
# The next line is an internal revision control id:
# $Date: 2007/11/08 17:19:19 $ $Revision: 1.2 $
# Copyright (c) 2007 David M. Harrison
# Import the visual library.
from visual import *
# These four lines control the size of the window of
# the animation and the scale. The details of these lines
# are not important for our purposes.
scene.autoscale = 0
scene.height = 400
scene.width = 800
scene.range = vector(60, 60, 60)
# Create the green ball that will execute simple harmonic motion
# by numerical integration.
greenBall = sphere (color = color.green, radius = 2)
# yellowBall will execute simple harmonic motion using a sine function.
yellowBall = sphere (color = color.yellow, radius = 2)
# The initial x position of the balls: this is
# the equilibrium position.
x = 0
# Position the balls. pos is a built-in of VPython, and
# lists the (x,y,z) coordinates. The x axis is horizontal,
# y axis is vertical, and the z axis is perpendicular to
# the plane of the screen. We place the green ball just
# below the center of the scene, at y - -10.
#
greenBall.pos = (x,-10,0)
# yellowBall is above the first ball: it's y coordinate is 10,
# just above the center of the scene.
yellowBall.pos = (x, 10, 0)
# The initial x component of the velocity of the balls:
# all other components are zero.
vx = 150
# The spring constant
k = 9.0
# The mass of the balls
mass = 1.0
# The amplitude of yellowBall's motion
ampl = sqrt(mass/k) * vx
PHY131 Practicals Manual
Numerical Approximation Module
93
# The time
t = 0
# This is the time step
dt = 0.005
# This causes the following indented lines
# to be executed forever in a loop.
while 1 == 1:
# Set the rate of the animation
rate(1/dt)
# The acceleration in the x direction.
a = -(k/mass) * x
# Update the speed using the acceleration. Note
# that we "recycle" the variable vx, replacing the
# old value with the new one.
vx = vx + a*dt
# Update the x position of the ball using the speed.
x = x + vx*dt
# Position greenBall at the new x position
greenBall.pos = (x, -10, 0)
# Update the time
t = t + dt
# Now we calculate simple harmonic motion using
# a sine function and position yellowBall using the result
# of the calculation
x2 = ampl * sin( sqrt(k/mass)* t)
yellowBall.pos = (x2,10,0)
This Guide was written by David M. Harrison, Dept. of Physics, Univ. of Toronto in November 2007.
Last revision: March 4, 2008.
PHY131 Practicals Manual
Numerical Approximation Module
94
Fluids Module
Student Guide
Concepts of this Module
Fluids
Pressure
Buoyancy
Fluid dynamics
The Activities
Activity 1
Open the gas-properties.jar animation which is located at
feynman:public/Modules/Fluids. There are many useful ways to use this
animation, and we will only draw you attention to a couple of things that you may wish to
do; you are encouraged to explore further.
Here is a screen shot of the default animation after some Heavy Species molecules have
been pumped into the container:
PHY131 Practicals Manual
Fluids Module
95
A. You will notice that the reading of the Pressure gauge is not constant. Explain
why this is so. What would be necessary for the pressure reading to be more
constant? How would you present a value for the pressure that also expresses your
observed variations?
There are many options for controlling the animation. We shall describe two of them.
1. By default the acceleration due to gravity g is zero. You may introduce a non-zero
value of g with the Gravity slider.
2. By clicking on the Measurement Tools button you may turn on the Layer tool.
This tool measures the pressure in the gas at a specified height; you may drag the
position of the measurement with the mouse. You can also specify the time over
which the value of the pressure is averaged.
Here are some suggested explorations.
B. Use the Layer tool with various settings of the Averaging Time. Describe what
happens. If this was not part of your answer to Part A, should it have been?
C. With Gravity set to 0, predict how the pressure in the gas varies with height.
Check your prediction using the Layer tool. Were you correct? If the pressure
varies with height, does it vary is the height, the height squared, one over the
height, or what?
PHY131 Practicals Manual
Fluids Module
96
D. Introduce a non-zero Gravity. Predict how the pressure varies with the height.
Check your prediction. Were you correct? If the pressure varies with height, does
it vary is the height, the height squared, one over the height, or what?
Activity 2
Cylinder A is being filled to the level shown. As the water is added to the cylinder it
flows along the horizontal pipe and up B, C and D, which are all open at their tops.
Rank the heights of the water in A, B, C, and D when A is filled. Check your prediction
using the supplied apparatus. Was your prediction correct? If yes, what physical
principles did you use to make a correct prediction? If no, explain the actual result.
Activity 3
A rigid rectangular container filled with water is at
rest on a table as shown. Two imaginary boundaries
divide the water into three layers of equal volume. No
material barrier separates the layers.
A. Draw a free body diagram for each layer. The
label for each force should include:
A description of the force, and
PHY131 Practicals Manual
Fluids Module
97
The object on which the force is exerted, and
The object exerting the force.
B. Rank the magnitude all the vertical forces you have drawn for Part A, from the
smallest to the largest. Explain how you determined the ranking.
C. Rank the magnitude of all the horizontal forces you have drawn for Part A, from
the smallest to the largest. Explain how you determined the ranking.
Activity 4
A small square hole of area A is cut in the side of the
container of Activity 2. The centre of the hole is a
height z above the tabletop. Consider the rectangular
section of water of area A aligned with the hole, as
shown.
A. Draw a free body diagram of all the forces
acting on the rectangular section of water.
B. What will happen to the water just inside the
hole?
Activity 5
A bucket of water has a spring soldered to the
bottom. Attached to the other end of the spring is a
cylindrical cork of mass m, height h and area A
which is stationary below the surface of the water,
as shown. The top of the cork is a depth d below
the surface of the water. The spring has a spring
constant k and is stretched a distance x from its
equilibrium position. The density of the water is .
Draw a free body diagram of all the vertical forces
acting on the cork. Evaluate the magnitude of
those forces. Determine x, the amount that the string is stretched from its equilibrium
position.
PHY131 Practicals Manual
Fluids Module
98
Activity 6
A hydrometer measures the density of a liquid. They are
widely used to measure the alcohol content in the brewing
of beer, the electrolyte content of battery acid, and more.
The device is placed in the liquid whose density is to be
measured, and the density is read by the place on the scale
where the surface of the liquid touches the stem.
Here is a close-up figure of two possible ways that the
markings on the scale of the hydrometer can be arranged.
Which of these arrangements are correct? Explain.
Activity 7
Please do this Activity with all the apparatus in the supplied dishpan to minimize the
water spilled onto the tabletop.
You are supplied with a beaker. You should fill it with water nearly to
the top. Place the supplied medicine dropper in the water with the
squeeze bulb on top. Suck enough water up into the medicine dropper
that it just barely floats.
You are supplied with an empty 2 liter plastic pop bottle. Fill it to the brim with water.
Transfer the filled medicine dropper to the water in the pop bottle.
Screw the top tightly on the bottle. Squeeze the bottle. What happens to the medicine
dropper? What happens when you quit squeezing the bottle? Explain why squeezing the
PHY131 Practicals Manual
Fluids Module
99
bottle and increasing the pressure of all the fluids within would cause the observed
motion. This is called a Cartesian diver.
The supplied toothpicks make it easy to “fish” the medicine dropper out of the bottle.
When you are finished with this Activity, carefully empty all the water into the sink.
Activity 8
You may have noticed that the bubbles in a glass of a carbonated beverage (soda, beer,
champagne, etc) accelerate as they rise from the bottom. Explain.
Activity 9
A ship is in a canal lock, which is only a little bit larger than the ship itself. The ship is
loaded with steel ingots, which are large bars of steel. The crew becomes angry with the
captain of the ship and throws the steel ingots overboard into the water of the lock.
Does the level of the water in the lock rise, lower, or stay the same?
Check your prediction. Place the supplied plastic tank in the dishpan and fill the tank
about half-way with water. Place the supplied weight in the bottom of the supplied plastic
boat and gently place it in the water. You may mark the height of the water in the tank
with a small piece of masking tape. Carefully lift the boat out of the water, place the
weight at the bottom of the tank, and put the boat back in the water.
When you are finished with this Activity, carefully empty the water into the sink.
Activity 10
A water tank with water of
height h has a small hole cut
in the side at height z. The
water strikes the ground at x.
The figure shows the
streamline from the top of the
water at A to just outside the
hole B. Recall that
Bernoulli’s equation is:
PHY131 Practicals Manual
Fluids Module
100
p
1
v 2 gy const
2
If the hole is small, it is reasonable to approximate that the speed of the water at A is
zero. Since point A and B are in contact with the outside air, it is reasonable to
approximate that the pressure is the same at point A and B, that of atmospheric pressure
in the room.
A. What will be the shape of the stream of water emerging from the hole until it
strikes the ground?
B. Without using any equations, describe how the speed of the water at B varies with
z, How will the distance x depend on z?
C. Use Bernoulli’s equation and your knowledge of projectile motion to derive the
answers to Part B. For what value of z will x be a maximum? What
approximations are you making? Are those approximations reasonable?
D. You are supplied a tank with small holes cut in it at values of z = 0.75 h, 0.50 h,
and 0.25 h, where the height of the water h is indicated by a mark on the tank.
Place the tank in the supplied dishpan: place it on one end of the dishpan with the
holes pointing towards the other end of the dishpan. Fill the tank with water to the
mark. As the water level drops appreciably add water. Is what you see consistent
with your results from Parts B and C?
When you are finished with this Activity, carefully empty the water into the sink.
Activity 11
When an object falls through a fluid, either a liquid or a gas, there are three forces that act
on it:
1. The downward force due to gravity, FG . This is the weight of the object.
2. An upward buoyant force, FB . As Archimedes realized over 2,000 years ago, this
is equal to the weight of the fluid that the object displaces.
3. An upward drag force, FD .
In this Activity we will concentrate on the drag force exerted on a sphere falling through
a fluid. We assume that the surface of the sphere is perfectly smooth. We will use the
following variables in the discussion:
r: the radius of the ball.
v: the instantaneous speed of the ball.
: the density of the fluid.
the kinematic viscosity of the fluid. This is sometimes called liquid friction. It
is measured in units of pressure × time.
PHY131 Practicals Manual
Fluids Module
101
Here are some values for the density and viscosity of various fluids.
Density (kg/m3)
-1.2
998
914
1260
1,500
Fluid
Superfluid
Air (20 ºC)
Water (20 ºC)
Olive Oil (88 ºC)
Glycerine (20 ºC)
Honey (20 ºC)
Viscosity (mPa-s)
0
0.0182
1.00
43.2
658
5,000
There are various ways that the fluid can flow around the sphere.
If the speed of the ball is small, the flow is “smooth” or
“laminar”. In this case it turns out that the drag force is
proportional to the speed.
FD v
This was first shown by Stokes in 1851. This will be explored
further in Part E.
When the ball is going faster, turbulence develops in the fluid
behind the ball. In this case the drag force is approximately
proportional to the speed.
FD v 2
Note that in both of these cases, as the ball’s speed increases the drag force increases.
Thus at some point the drag plus buoyant forces approaches the magnitude to the weight
of the ball, so asymptotically there is zero net force acting. Then the speed of the ball
becomes constant: the value of the speed is called the terminal velocity. For a sky diver
falling face down with arms and legs outstretched, the terminal velocity is about 55 m/s.
If the sky diver falls feet first, feet together and arms close to the body, the terminal
velocity goes up to about 90 m/s. When the sky diver opens the parachute, the drag force
goes way up and the terminal velocity falls to about 5 m/s.
PHY131 Practicals Manual
Fluids Module
102
Whether the fluid flow around the ball is laminar or turbulent turns out to depend only on
a single dimensionless number, the Reynolds number Re.
Re
r
v
Re
≤1
1 - 1 × 103
1 × 103 – 1.5 × 105
Type of Flow
Laminar
Transition
Turbulent
Note that for constant r, , and the Reynolds number is proportional to speed.
Therefore when a ball is dropped from a large height, Re increases until the terminal
velocity is reached.
When the Reynolds number reaches ~ 1.5 × 105 the forces on the fluid near the ball
become extreme, and both the wake and the layer of fluid right next to the ball become
turbulent. This causes a sudden change in the way the luid flows around the ball, and the
turbulent wake becomes narrower. When this happens, the drag force drops and the
acceleration of the ball increases. This is called the drag crisis. As the speed increases
further, the drag force resumes increasing with speed.
A. A ball of radius r is falling through a fluid and at some time has an instantaneous
speed v. A second ball of radius 2r is falling through the same fluid. At what
instantaneous speed will the second ball have the same flow pattern of fluid
around it as the first ball?
B. Here is the URL of a Flash animation of dropping a ball from the CN Tower:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/FluidDynamics/BallCNTower/BallCNTower.html
The above link is to a fixed size animation which works nicely if only one person
it viewing it. For use in the Practical itself a version which can be resized to be
larger so that the entire Team can see it is better. Here is a link to such a version:
http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/FluidDynamics/BallCNTower/BallCNTower.swf
Open the animation and explore how it works.
For the keen some details about this animation and the one you will explore in
Part D are in the Appendix.
C. For air, in SI units the Reynolds number is:
Re
r
v 70,000 r v
PHY131 Practicals Manual
Fluids Module
103
For the billiard ball, 5-pin bowling ball, and 10-pin bowling ball calculate the
speed for which the drag crisis occurs. Are these results consistent with what you
see in the animation of Part B?
D. Here is the URL of a Flash animation of dropping a ball in a liquid:
http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/FluidDynamics/ViscousMotion/ViscousMotion.html
As with the animation of Part B, you may access a resizable version at:
http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/FluidDynamics/ViscousMotion/ViscousMotion.swf
Open the animation and explore how it works.
E. For small Reynolds numbers, so the fluid flow is laminar, the drag force is:
FD 6 r v
You may be surprised by the fact that the density of the fluid does not appear in
this equation. When the sphere is at terminal velocity the net force is zero:
FD FG FB
Therefore:
vter min al
FG FB
6 r
For the animation of Part D, set the following values:
r = 20 mm
= 5850 mPa-s
liquid = 1500 kg/m3
ball = 5000 kg/m3
Note the values of the ball weight and buoyant force and their difference. Run the
animation and note the terminal velocity.
Now set the radius of the ball to 25 mm. Adjust the viscosity of the liquid so the
drag force will be the same as the previous case. Adjust the liquid and ball
densities so the ball weight minus the buoyant force is about the same as the
previous case; you are unlikely to find values of the densities which are exactly
the same, but can find ones that make the value almost the same. Does the
animation match the theory? In particular is the motion of the ball the same for
these two cases?
PHY131 Practicals Manual
Fluids Module
104
Appendix
Although the details of how the animations of Activity 10 work are not important for
your learning of fluid dynamics, here we “lift the hood” to discuss the internals of the
animations.
Except in the limit of laminar flow, the theory of drag forces is not easily solvable. Thus
the animation uses a mixture of experimental data and some heuristic formulae that
describe the data reasonably well. It turns out to be convenient to describe the drag force
in terms of a drag coefficient CD(Re), which is a function only of the Reynolds number.
Then the drag force is:
FD CD (Re) liquid r 2 v 2
For laminar flow (Re ≤ 1):
C D (Re)
6
Re
For larger values of the Reynolds number, experimental data on the dependence of the
drag coefficient on the Reynolds number must be used. The data used in the animation is
adapted from H. Edward Donley, UMAP Journal 12(1), 47 (1991),
http://www.ma.iup.edu/projects/CalcDEMma/drag/drag7.html.
To parameterize this data involves some truly ugly equations. We used forms by John
Versey and Nigel Goldenfleld, “Simple viscous flows: From boundary layers to the
renormalization group”, Rev. Mod. Phys. 39(3), 883 (2007), http://rmp.aps.org/browse.
The Donley data and the Versey and Goldenfleld interpolation of it is shown on the next
page.
The turbulent flow case (1 × 103 < Re < 1.5 × 105 ) corresponds to the part of the above
plot where the drag coefficient is approximately constant independent of the Reynolds
number. Note that, despite the notation used in the axes of the figure, the values are the
natural logarithms of the values.
The drag crisis is when the drag coefficient suddenly drops.
Once the drag force for a given speed has been determined, then we know the net force
acting on the ball and hence its acceleration. We use a numerical approximation to find
the motion of the ball. The method is similar to one you may have explored in the
Numerical Approximation Module. For a time step dt.
PHY131 Practicals Manual
Fluids Module
105
1. From the acceleration, calculate the new speed of the ball:
vnew = vold + a × dt
2. From the new speed calculate the new position of the ball:
ynew = yold + vnew × dt
3. From the new value of the speed calculate the new drag force and then the new
acceleration of the ball.
4. Go to 1 and repeat.
The above scheme turns out to not be accurate enough for our animation, so an extension
of it called a 4th order Runge-Kutta is used. It turns out that for this calculation to be
stable we must iterate the Runge-Kutta 10 times for every frame of the animation. Since
the animation runs at 12 frames per second, this means that the time step dt is 1/120 =
0.17 s.
This Student Guide was written by David M. Harrison, Dept. of Physics, Univ. of Toronto, May 2008.
The animation used in Activity 1 is from the Physics Education Technology (PhET) group at the University
of Colorado, http://phet.colorado.edu/new/index.php. Activity 2 is based on Lillian McDermott et al.,
Tutorials in Introductory Physics (Prentice Hall, 20020, ST 219. Activities 5 and 7 are based on David
M. Harrison and William Ellis, Student Activity Workbook, 3rd ed. (Norton, 2008), 18.4 and 18.6. The
figure for Activity 5 is slightly modified from a figure from Wikipedia,
http://en.wikipedia.org/wiki/Hydrometer, retrieved June 19, 2008.
Last revision: November 20, 2008.
PHY131 Practicals Manual
Fluids Module