Classical Mechanics Assignment 8 Solutions
advertisement

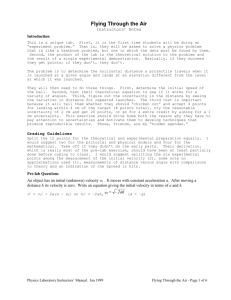
PC235 Winter 2013 Classical Mechanics Assignment #8 Solutions #1 (5 points) JRT Prob. 9.2 A donut-shaped space station (outer radius R) arranges for artificial gravity by spinning on the axis of the donut with angular velocity ω. Sketch the forces on, and accelerations of, an astronaut standing in the station: (a) as seen from an inertial frame outside the station, and (b) as seen in the astronaut’s personal rest frame (which has a centripetal acceleration A = ω 2 R as seen in the inertial frame). What angular velocity is needed if R = 40 meters and the apparent gravity is to equal the usual value of about 10 m/s? (c) What is the percentage difference between the perceived g at a six-foot astronaut’s feet (R = 40 m) and at his head (R = 38 m)? Solution (a) As seen by inertial observers outside the station, the astronaut has a centripetal acceleration A = ω 2 R which is supplied by the normal force N. (b) As seen by the crew inside the station, the astronaut is at rest under the action of two forces, the normal force N and the inertial force 2 −mA. q To simulate normal gravity, we must have A = ω R = g or ω = g/R =0.5 rad/s = 4.8 rpm. (c) The apparent gravity gapp = ω 2 R is proportional to R. Thus if we decrease R from 40 m to 38 m, the fractional change in gapp is δgapp /gapp = δR/R = −5%. #2 (5 points) JRT Prob. 9.8 What are the directions of the centrifugal and Coriolis forces on a person moving: 1 Fig. 1: Question #1 - forces on and accelerations of the astronaut. (a) south near the north pole? (b) east on the equator? (c) south across the equator? Solution In all cases, Ω is directed through the earth’s axis from south pole to north pole. Recall that Fcor = 2mv × Ω and Fcf = m(Ω × r) × Ω. (a) Fcf is directed south and slightly upward (that is, away from the earth’s axis. This assumes that we are “near” the north pole...exactly at the north pole, the force is zero). Fcor is directed to the west (this force deflects objects to the right in the northern hemisphere, which means to the west when traveling south). (b) Fcf is directed vertically upward (i.e. away from the earth’s axis). Fcor is directed vertically upward as well, since v is east and - at the equator - Ω is north. (c) Fcf is directed vertically upward (i.e. away from the earth’s axis). Fcor is zero, since v and Ω are oppositely directed. #3 (5 points) JRT Prob. 9.10 The derivation of the equation of motion (eq. 9.34 from the text) for a rotating frame made the assumption that the angular velocity Ω was constant. Show that if Ω̇ 6= 0, then there is a third “fictitious force” on the right hand side of (9.34) equal to mr × Ω̇. 2 Solution From (9.31) to (9.32) the derivation is exactly the same whether Ω varies or not. If Ω varies, then the first time derivative on the right of (9.32) picks up an extra term involving Ω̇. Specifically, we now have d2 r dt2 ! = r̈ + 2Ω × ṙ + Ω × (Ω × r) + Ω̇ × r. (1) S0 If we multiply both sides by m, the left side becomes F, the net “real” force, and we get the equation of motion mr̈ = F + 2mṙ × Ω + m(Ω × r) × Ω + mr × Ω̇, (2) where we used the fact that A × B = −B × A. #4 (10 points) JRT Prob. 9.11 Let S be a noninertial frame rotating with constant angular velocity Ω relative to the inertial frame S0 . Let both frames have the same origin. (a) Find the Lagrangian L = T − U in terms of the coordinates r and ṙ of S. (b) Show that the three Lagrange equations reproduce eq. (9.34) exactly. Solution (a) The KE evaluated in the inertial frame S0 is T = 12 mv20 = 21 m(v + Ω × r)2 , so the Lagrangian is L = 21 m(ṙ + Ω × r)2 − U . (b) The derivatives of L are as follows: ∂ ∂U ∂L = m(ṙ + Ω × r) · (Ω × r) − ∂x ∂x ∂x ∂U = m(ṙ + Ω × r) · (0, Ωz , −Ωy ) − ∂x ∂U = m [(ṙ + Ω × r) × Ω]x − , ∂x 3 (3) (4) (5) where the notation [·]x indicates the x-component of the vector contained in the brackets. Combined with the corresponding y and z equations, we have ∂L = mṙ × Ω + m(Ω × r) × Ω + F. ∂r (6) A similar approach results in d ∂L = m(r̈ + Ω × ṙ). dt ∂ ṙ (7) Thus, the three Lagrange equations are mr̈ = F + 2mṙ × Ω + m(Ω × r) × Ω, (8) which agrees with eq. (9.34). #5 (10 points) JRT Prob. 9.14 I am spinning a bucket of water about its vertical axis with angular velocity Ω. Show that, once the water has settled in equilibrium (relative to the bucket), its surface will be a parabola. Solution In the rotating frame of the bucket, the water is in equilibrium and its surface is an equipotential surface for the combined gravitational force (U = mgz) and centrifugal force (F = mΩ2 ρ and hence U = −mΩ2 ρ2 /2). Therefore, the surface is given by mgz − mΩ2 ρ2 /2 = const, or z= Ω2 ρ2 + const, 2g (9) which is a parabola, as claimed. #6 (10 points) JRT Prob. 9.18 A particle of mass m is confined to move, without friction, in a vertical plane, with axes x horizontal and y vertical. The plane is forced to rotate with constant angular velocity Ω about the y axis. Find the equations of 4 motion for x and y, solve them, and describe the possible motions. Solution As seen in a frame rotating with the system, there are four forces acting on the mass: its weight −mgŷ, the centrifugal force mΩ2 xx̂, the normal force FN of the confining plane, and the Coriolis force Fcor . The last two both act in the z direction (normal to the plane); this is because the mass’s velocity only has x- and y-components, whereas Ω has only a y component. Since the mass is confined to the plane, the Coriolis and normal forces must cancel. Meanwhile, the equations of motion in x and y are ẍ = Ω2 x and ÿ = −g, (10) with solutions 1 and y = y0 + vy0 t − gt2 . (11) 2 The second equation tells us that the vertical motion of the mass is simply that of a body in free fall. For the horizontal motion, the mass might initially move inward toward the axis of rotation (depending on the initial conditions that determine A and B), but it will eventually move outward - at an exponentially increasing rate - due to the centrifugal force. An exception is the case where the initial conditions produce A = 0. Here, the particle moves inward, with a speed that continuously slows down because of the (increasingly weaker) centrifugal force, approching the y axis asymptotically as t → ∞. x = AeΩt + Be−Ωt #7 (15 points) JRT Prob. 9.20 Consider a frictionless puck on a horizontal turntable that is rotating counterclockwise with angular velocity Ω. (a) Write down Newton’s second law for the coordinates x and y of the puck as seen by me, standing on the turntable (ignore the earth’s rotation). (b) Solve the two equations by the trick of writing η = x + iy and guessing a solution of the form η = e−iαt . Write down the general solution. (c) At time t = 0, I push the puck from position r0 = (x0 , 0) with velocity v0 = (vx0 , vyo ). Show that x(t) = (x0 + vxo t) cos Ωt + (vy0 + Ωx0 )t sin Ωt y(t) = −(x0 + vxo t) sin Ωt + (vy0 + Ωx0 )t cos Ωt. 5 (12) (13) (d) Describe and sketch the behaviour of the puck for large values of t. Solution (a) The net “real” force is zero, so we have to consider only the centrifugal and Coriolis forces. Therefore, mr̈ = Fcf + Fcor = m(Ω × r) × Ω + 2mṙ × Ω. (14) Since r = (x, y, 0) and Ω = (0, 0, Ω), the various vector products are easily found, and the equation of motion becomes r̈ = Ω2 (x, y, 0) + 2Ω(ẏ, −ẋ, 0), (15) or, in terms of components, ẍ = Ω2 x + 2Ωẏ and ÿ = Ω2 y − 2Ωẋ. (16) (b) If we multiply the equation for ÿ by i and add it to that for ẍ, we find that η̈ = Ω2 η − 2iΩη̇. Guessing a solution of the form η = e−iαt , we see that this guess is a solution if and only if α satisfies the equation −α2 = Ω2 − 2Ωα, or (α − Ω)2 = 0. This has just the one solution α = Ω. As we saw in the oscillations chapter (section 5.4), the general solution is η(t) = e−iΩt (C1 + C2 t). (17) (c) The initial conditions imply that η(0) = x0 and η̇0 = vx0 + ivy0 , while from part (b) we see that η(0) = C1 and η̇0 = C2 − iΩC1 . This gives two equations for C1 and C2 , which are solved to give η(t) = e−iΩt [x0 + vx0 t + i(vy0 + Ωx0 )t] . (18) Taking real and imaginary parts, we obtain the x(t) and y(t) shown above. (d) For t sufficiently large we can neglect the terms that do not contain a factor of t. In this case, the equations of motion become x(t) = t(B1 cos Ωt + B2 sin Ωt) and y(t) = t(−B1 sin Ωt + B2 cos Ωt) (19) 6 with B1 = vx0 and B2 = vy0 + Ωx0 . If we define A = eq. (5.10), then these become q B12 + B22 as in x(t) = tA cos(Ωt − δ) and y(t) = −tA sin(Ωt − δ). (20) Without the factor of t, the puck would just move in a clockwise circle of radius A. The factor of t means that this circle grows at a constant rate, and the puck actually moves in a spiral orbit as shown below. Fig. 2: Path of the puck in question #7 #8 (5 points) A puck slides with speed v on a very large, frictionless sheet of ice. The surface is “level”, in the sense that it is orthogonal to geff at all points (and therefore, we can neglect the centrifugal force and consider only the Coriolis force). Show that the puck moves in a circle, as seen in the earth’s rotating frame. Calculate the radius of the circle (note that we’d need a very large ice sheet in order to complete the entire circle). What is the angular velocity of the circular motion? Assume that the radius of the circle is small compared to the radius of the earth. Solution The Coriolis force is Fcor = 2mv × Ω. The assumption that the radius of the circle is small compared to the radius of the earth implies that, although the puck is moving, its colatitude θ is approximately constant. The component of Fcor that lies along the ice surface is ft,cor = 2mv(Ω cos θ); by the definition of the cross product, it is perpendicular to the direction of motion. The component of Fcor that lies normal to the ice surface is irrelevant; all it 7 accomplishes is a slight modification of the normal force that constrains the puck to the ice (if there was some friction involved then this change to the normal force would be important, but that’s not the case here). Because the Coriolis force is perpendicular to the direction of motion, it can do no work on the puck, and therefore, by the work-KE theorem, the puck’s KE - and thus its speed - cannot change. Since the mass, the colatitude, and Ω are all constant, that means ft,cor = 2mv(Ω cos θ) is constant. But, a constant force that is always perpendicular to the motion of a particle always produces a circular path. But what is the radius of this circle? We find r using Newton’s 2nd law in the radial direction (of the puck’s circular motion, that is), accounting for the centripetal acceleration due to the uniform circular motion: mv 2 v F = ma → 2mv(Ω cos θ) = . →r= r 2Ω cos θ (21) The angular velocity of this motion is ω= v = 2Ω cos θ. r (22) To get a rough idea of the size of the circle, when θ = 45◦ and v = 1 m/s, we have r ≈ 10 km. This (and the lack of a zero-friction ice sheet) explains why it’s impossible to actually witness this effect. #9 (10 points) JRT Prob. 9.26 In section 9.8, we used a method of successive approximations to find the orbit of an object that is dropped from rest, correct to first order in the earth’s angular velocity Ω. Show in the same way that if an object is thrown with initial velocity v0 from a point O on the earth’s surface at colatitude θ, then to first order in Ω its orbit is 1 x = vx0 t + Ω(vy0 cos θ − vz0 sin θ)t2 + Ωgt3 sin θ 3 y = vy0 t − Ω(vx0 cos θ)t2 1 z = vz0 t − gt2 + Ω(vx0 sin θ)t2 . 2 Solution 8 (23) (24) (25) The equations of motion are given in eq. (9.53) from the text: ẍ = 2Ω(ẏ cos θ − ż sin θ) ÿ = −2Ωẋ cos θ z̈ = −g + 2Ωẋ sin θ. (26) (27) (28) To zeroth order in Ω, these reduce to ẍ = 0, ÿ = 0, z̈ = −g. (29) For an initial velocity v0 = (vx0 , vy0 , vz0 ) and initial position r0 = (0, 0, 0) (the object is thrown from the origin O), these equations have the familiar solutions 1 (30) x = vx0 t, y = vy0 t, z = vz0 t − gt2 . 2 Differentiating once, we get ẋ = vx0 , ẏ = vy0 , ż = vz0 − gt. (31) Substituting these back into eq. (9.53) results in ẍ = 2Ω(vy0 cos θ − vz0 sin θ) + 2Ωgt sin θ ÿ = −2Ωvx0 cos θ z̈ = −g + 2Ωvx0 sin θ. (32) (33) (34) Integrating these equations twice, and applying the proper constants of integration (the starting velocity and position components), we get 1 x = vx0 t + Ω(vy0 cos θ − vz0 sin θ)t2 + Ωgt3 sin θ 3 y = vy0 t − Ω(vx0 cos θ)t2 1 z = vz0 t − gt2 + Ω(vx0 sin θ)t2 , 2 as required. #10 (10 points) JRT Prob. 9.29 9 (35) (36) (37) (a) A baseball is thrown vertically up with initial speed v0 from a point on the ground at colatitude θ. Use the solution of the previous question to show that the ball will return to the ground a distance (4Ωv03 sin θ)/(3g 2 ) to the west of its launch point. (b) Estimate the size of this effect on the equator if v0 = 40 m/s. (c) Sketch the ball’s orbit as seen from the north (by an observer fixed to the earth). Compare with the orbit of a ball dropped from a point above the equator, and explain why the Coriolis effect moves the dropped ball to the east, but the vertically thrown ball to the west. Solution (a) Since the ball is thrown vertically upward, we have vxo = vyo = 0 and vz0 = v0 . The trajectory give by the equations in the previous question is 1 1 x = −Ω sin θ(v0 − gt)t2 , y = 0, z = v0 t − gt2 . (38) 3 2 We see that the ball does not stray in the north-south (y) direction (at least to first order in Ω), but it does move in the east-west (x) direction. The time for the ball to return to the ground is found by setting z = 0, resulting in tgr = 2v0 /g (the other solution, t = 0, is the starting time, at which the ball is also on the ground. This is irrelevant.) Substituting this value into the x equation, we find xgr = −(4Ωv03 sin θ)/(3g 2 ). This must be negative (since 0 ≤ θ ≤ π), meaning that the deflection is in the −x direction, i.e. to the west. (b) The westerly displacement is maximum at the equator, where sin θ = 1. The displacement is 4Ωv03 4 × (7.3 × 10−5 ) × (40)3 = ≈ 0.065 m. 3g 2 3 × (9.8)2 (39) (c) On the upward journey, the Coriolis force accelerates the ball to the west, and on the downward journey to the east. Thus, vx starts from zero, increases (to the west) as the ball climbs, and decreases back to zero by the time the ball lands. Throughout the trip, vx is to the west, so the ball lands to the west of its starting position. On the other hand, the dropped ball starts with vx = 0 at the top, and its whole 10 journey is downward, so that the Coriolis force accelerates it to the east throughout. Thus, vx is to the east at all times, and the ball lands to the east of the initial position. Figures are below. Fig. 3: Trajectories in question #10 11