master's thesis
advertisement

MASTER'S THESIS
Calibration and Theory of EUV Detectors
The PHEBUS EUV Detector on BepiColombo and the Exceed EUV Detector
on SPRINT-A
Philip Påhlsson
2013
Master of Science in Engineering Technology
Space Engineering
Luleå University of Technology
Department of Computer Science, Electrical and Space Engineering
CALIBRATION AND THEORY OF EUV DETECTORS
- THE PHEBUS EUV DETECTOR ON BEPICOLOMBO AND THE EXCEED
EUV DETECTOR ON SPRINT-A
A Thesis
Presented to
The Department of Space Science
Luleå University of Technology, Luleå
In Partial Fulfilment
of the Requirements for the Degree
Master of Science
By
Philip Påhlsson
January 2013
ACKNOWLEDGEMENTS
There are several people that have contributed to the work presented in this thesis.
First and foremost, I wish to express my sincere gratitude to my supervisor, Professor
Ichiro Yoshikawa for letting me join his laboratory during the period of my master
thesis. I wish to thank you for your encouragement and friendship and I am very
impressed by your abilities as a race-car driver! I wish to thank Dr. Kazuo Yoshioka
and Dr. Go Murakami of ISAS/JAXA that taught me about the detectors and always
helped me out when I needed guidance. I will always be a fan of Ghibli! My utmost
respect and gratitude goes to Uji Kentaro, thank you for all the discussions and that
you introduced me to the fantastic Japanese culture, you are a true friend.
I also wish to thank my supervisor at IRV, Thomas Kuhn for your help throughout
the project.
A special thanks goes to Dr. Victoria Barabash, for your confidence in me when
sending me to Tokyo and your encouragement throughout my education at IRV, and
Maria Winnerbäck for all your help.
I wish to thank my family and friends for their patience and support throughout
my endeavours.
I also wish to thank my girlfriend Caroline for her sincere support.
Philip Påhlsson
ii
ABSTRACT
Calibration of extreme ultraviolet (EUV) instruments utilized in space missions is
essential in order to determine detector properties and optimize their design. Under
the supervision of Professor Yoshikawa, this study has looked into Resistive Anode
Encoders (RAE). Part of the thesis study the RAE readout mechanism and the role
of RAE shape, readout technique, electrode position, sheet resistivity and intrinsic
capacitance and its effect on detector positional resolution and image distortion. The
goal of the study is to increase knowledge of Micro channel plate (MCP) and RAE
based detectors so that it can be applied in primarily the development of the PHEBUS
and EXCEED detectors and also in future EUV detectors developed at the University
of Tokyo.
A general conclusion that RAE of Professor C.W Gear’s circular arced terminated
design utilizing charge ratio as readout technique is favourable from both resolution
and distortion perspectives is made. In order to determine the distortion the RAE
and MCP assemblies has been irradiated by a deuterium source through a fixed grating. The Gear anode is found to have an ideally linear position response over the
majority of the anode area and shows small signs of positive radial distortion, known
as barrel distortion. When designed as a rectangle the effective area of the detector
diminishes and the barrel distortion increases.
The report also includes a study on determination of correct pulse shape amplifier
time constants for optimized operational resolution. A conclusion is drawn, that RAE
resistivity and intrinsic capacitance governs the charge diffusion speed through the
anode resistive layer and the correct choice of shaper time constant to match the
charge diffusion speed, as well as frequency of incoming particles are the key elements
in a high resolution distortion free RAE based detector.
iii
The study includes a series of experiments on RAE charge diffusion and charge
injection techniques. The reason for previously unknown RAE charge leakage is explained and has through experiments with probe injected charge been identified to
be an error in charge injection technique rather than an error in the anode itself.
Theory on correct probe injection is presented stating that injection of charge should
be done with a probe with minimized probe tip area. This result shows that injection
of charge through a probe tip is not suitable for resistive anode surfaces due to their
mechanically brittle nature. Further research into electron gun injection of charge is
suggested as an alternative.
Measurements of overall detector capacitance have been made utilizing a number
of electronic circuits. A Schering bridge is proved to be partially successful and a
AVR based timing circuit is shown to be superior in measurement accuracy. The
capacitances between the different MCP stages and towards ground is found to be
in the range of 30 pF - 150 pF which fit previous calculations made by Dr. Kazuo
Yoshioka.
iv
TABLE OF CONTENTS
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii
Abstract
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
viii
1 Introduction
1.1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
EUV Instruments . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2 Scientific Background
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.1
Mercury . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.2
Mercury Particle Environment . . . . . . . . . . . . . . . . . . . . . .
7
2.3
Io Plasma Torus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
3 Technical Description
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
BepiColombo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
3.1.1
Phebus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
EXCEED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
4 Calibration experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.1
3.2
4.1
4.2
RAE charge leakage . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.1.1
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
Detector capacitance measurement . . . . . . . . . . . . . . . . . . .
40
4.2.1
Bridge test circuits . . . . . . . . . . . . . . . . . . . . . . . .
42
4.2.2
Digital test circuit . . . . . . . . . . . . . . . . . . . . . . . .
54
4.2.3
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
v
4.3
Distortion measurement and effective area determination . . . . . . .
59
5 RAE Parameter Optimisation . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.1
1-D Capacitively Terminated RC-line . . . . . . . . . . . . . . . . . .
65
5.2
2-D Sheet Resistivity . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
5.3
1-D Capacitively Terminated RC-line Resolution . . . . . . . . . . . .
72
5.4
2-D Square Anode Resolution . . . . . . . . . . . . . . . . . . . . . .
75
5.5
Circular Arc Terminated Anode (Gear’s Anode) . . . . . . . . . . . .
78
5.6
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
References
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
A JYETECH AVR ATmega48 Capacitance meter schematic . . . . . . . . .
90
B A125B Schematic
91
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi
LIST OF FIGURES
2.1
Sodium emission in Mercury exosphere. Observation by Potter and
Morgan. Image adapted from [19]. . . . . . . . . . . . . . . . . . . . .
3.1
9
Artist depiction, exploded view of the BepiColombo spacecraft. Image
credit: ESA [17]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
3.2
Artist depiction of MPO spacecraft. Image credit: ESA [17]. . . . . .
16
3.3
Phebus qualification model (QM) Image credit: CNES[34]. . . . . . .
22
3.4
Phebus optical design. Image adapted from Chassefière [16]. . . . . .
24
3.5
EUV/FUV detector design, showing HV, voltage divider, photocathode, V-stack MCP, Z-stack MCP and RAE. Image adapted from Murakami [28]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
4.1
RAE simulation schematic in Orcad PSpice. . . . . . . . . . . . . . .
32
4.2
RAE charge/discharge characteristics. . . . . . . . . . . . . . . . . . .
33
4.3
Block diagram leaking charge measurement experimental setup. . . .
34
4.4
Charge division results L-shaped measurement. . . . . . . . . . . . .
35
4.5
Charge division results Square-shaped measurement.
. . . . . . . . .
35
4.6
Charge input/output ratio during probe injection test. . . . . . . . .
36
4.7
Grating test results. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.8
Electron count along a vertical line in the grating. . . . . . . . . . . .
38
4.9
Wheatstone bridge layout. Image adapted from [27]. . . . . . . . . . .
40
4.10 Wien parallel bridge layout. Image adapted from [27]. . . . . . . . . .
44
4.11 OrCAD PSpice schematic of the Wien parallel bridge. . . . . . . . . .
44
4.12 OrCAD PSpice simulation results of the Wien parallel bridge with
minimum amplitude at 159 kHz corresponding to C2 = 1nC as calculated. 45
vii
4.13 Wien parallel bridge box diagram. . . . . . . . . . . . . . . . . . . . .
45
4.14 Schering bridge layout. . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.15 Schering bridge results, C2 = 100pF . . . . . . . . . . . . . . . . . . .
50
4.16 Schering bridge results, C2 = 9.67nF . . . . . . . . . . . . . . . . . . .
51
4.17 Schering bridge results, Perfboard model. . . . . . . . . . . . . . . . .
52
4.18 Schering bridge test circuit. Coarse and fine adjustment of variable
resistors is seen on the front face of the box. . . . . . . . . . . . . . .
52
4.19 Parallel plate capacitor results, Schering bridge and AVR microcontroller. 54
4.20 Digital RC timer circuit. . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.21 Example of barrel and pincushion distortion. h is the undistorted vertices distance, h’ the distorted vertices distance.
. . . . . . . . . . .
59
4.22 Results utilising movable MCP in front of RAE. . . . . . . . . . . . .
61
4.23 IMATEST results showing signs of distortion in the square TEX RAE.
63
4.24 DXO Optics Pro 8 results, shows signs of barrel distortion and gimbal
θ 6= 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1
64
Equivalent circuit of 1-D Capacitively Terminated RC-line. Charge
injected as a step into x=X, modelled as a current source discharging
a capacitor. Image adapted from Kalbitzer et al. [2]. . . . . . . . . .
66
A.1 JYETECH AVR ATmega48 Capacitance meter schematic. . . . . . .
90
B.1 A125B Movable MCP/RAE Schematic. . . . . . . . . . . . . . . . . .
91
viii
LIST OF TABLES
3.1
BepiColombo key characteristics . . . . . . . . . . . . . . . . . . . . .
13
3.2
MPO scientific instruments . . . . . . . . . . . . . . . . . . . . . . . .
15
3.3
MMO scientific instruments . . . . . . . . . . . . . . . . . . . . . . .
15
3.4
PHEBUS EUV Detector Overview . . . . . . . . . . . . . . . . . . .
27
4.1
Results Wien bridge . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.2
EXCEED QM stray capacitance (pF) . . . . . . . . . . . . . . . . . .
57
5.1
Results of optimisation, Square anodes. . . . . . . . . . . . . . . . . .
78
ix
Chapter 1
INTRODUCTION
This report covers the work conducted during the period of April 2012 - October
2012, at The University of Tokyo. In University of Tokyo’s department of Earth and
Planetary sciences a diversity of space related research studies are taking place. The
main focus of the department is towards space physics and solar physics. Professor
Ichiro Yoshikawa has a research team that is devoted to the development of hardware for space missions. The team consists of Professor Ichiro Yoshikawa, Dr. Kazuo
Yoshioka (ISAS/JAXA), Dr. Go Murakami (ISAS/JAXA) and Uji Kentaro a Tokyo
University Masters student. The team has a close relationship to both the Phebus
project management that is situated in France, Meisei which is the detector electronics contractor in Saitama and Hamamatsu Photonics who provide the detector
optics. During the period of my work a number of meetings with these stakeholders
took place to further my understanding of the project structure.
The report covers the experiments conducted on the extreme ultra-violet (EUV) detectors on EXCEED and PHEBUS scientific payload that will be launched to Earth
orbit and Mercury orbit respectively. The two detectors are very similar in design
and were studied interchangeably during the stay at The University of Tokyo.
The report describes EUV spectroscopy in the introductory part. The report
moves on to the scientific background of the two missions, describing the expected
mission environments. The main focus is kept on the BepiColombo mission as it was
the initial target of this thesis. It has been expanded into the EXCEED mission as
well half way through the thesis.
1
A technical description is given of the BepiColombo hardware and the PHEBUS
EUV detector.
Next part of the report is dedicated to the experiments that were conducted. The
calibration experiments are described with an introduction to the theory, moving on
into calculations, simulations, construction and results. The chapter RAE Theory is
a chapter dedicated to a literature study of the Resistive Anode Encoder in an effort
to find detector parameters to optimise.
1.1
EUV Instruments
Extreme Ultra Violet(EUV) radiation is light in the wavelength region 10 nm -150 nm.
EUV photons have their origin in hot gas emission where very high energy electron
transitions occur. It is naturally occurring mainly in photoemissive processes and
electron collision induced ionization found in the solar corona and in planetary atmospheric interaction with the solar wind. Man-made EUV sources consist of lasers that
induce high temperature plasmas that emit EUV photons. EUV radiation is characterized by its inability to propagate in any medium but vacuum. This implies that
in order to observe in the EUV part of the spectrum the detector need to be outside
of Earth’s atmosphere. Long considered undetectable, the field of EUV spectroscopy
has become a mandatory part of scientific spaceborne payloads of today. [13]
In this report the PHEBUS EUV detector on BepiColombo is the main subject
of study, albeit the EUV detector on the Japanese ISAS/JAXA mission SPRINTA/EXCEED is studied as well.
The measurement objectives of the detectors are measurements of the thin exosphere of Mercury (PHEBUS) and in the plasma torus around Jupiter’s moon
Io(EXCEED). EUV light is emitted from a number of different molecules through
photoexcitation of their nuclei which result in photoemission in the EUV range. This
2
process can be used to map the thin exospheres in order to determine the abundance
of photoemissive species such as Na, Ca, Mg, Fe etc.
Instruments similar to detectors made especially for the EUV range can be found
in a multitude of applications. Most significant are the X-ray detectors used both in
space applications as well as in medical scanning systems. The detectors utilise similar
designs with a photocathode mounted in front of a channel electron multiplier (CEM)
or microchannel plate (MCP) that in turn is kept at accelerating potential compared
to a anode readout mechanism. Most common is the solid state detector followed by
the strip and wedge anodes or as in this report the resistive anode encoder (RAE).
The anode encoder is in turn connected to pre-amplifiers, pulse shaping amplifiers,
discriminators and ADC:s which comprise the readout electronics. The detectors peak
photon detection wavelength is determined by the choice of photocathode material
and anode material. EUV detectors are used as photon-counting devices that provide
information of the photon energy and angle.
3
Chapter 2
SCIENTIFIC BACKGROUND
2.1
Mercury
Mercury is the innermost planet in our solar system orbiting the sun at merely 0.3
Au at perihermion and 0.46 Au at apohermion. The orbit has an high ecliptic inclination of 7.01 degrees. Earth-based Mercury observations are difficult due to the
atmospheric disturbances coupled to Mercury’s position in the sky and Mercury orbiters are technically challenging and expensive projects. To this date Mercury is one
of the least explored planets in the solar system.
The combination of high inclination and short distance to the sun makes Mercury only visible from Earth during short periods of time before sunrise and sunset,
through a large airmass that generates an increase in atmospheric refraction and
random refraction from turbulence. The atmosphere absorbs radiation used for in
spectrographic measurements and atmospheric water vapour and oxygen attenuates
and refracts signals for radar based measurements. In addition, the solar elongation
angle between Mercury and the Sun is never larger than 28 degrees which create
difficulties for sensitive instruments that cannot be pointed that close to the Sun.
It was long thought that Mercury was in a 1:1 orbital mean motion to spin rate
resonance. The surface topography of mercury is hard to map from Earth but the few
times it was possible it seemed to be showing the same side towards earth at all times.
The reason for this has shown to be that Mercury is in an unusual 3:2 orbital-spin
resonance state that coincides with the Earth’s motion in a 4:3 spin-orbit resonance
state. [4]
4
In-situ observations are made difficult by the thermal environment in proximity
to the sun, any spacecraft in the vicinity of Mercury would be subject to a increased
solar irradiation of a factor 10 in addition to the reflected light of the sunlit side of
Mercury. The gravitational pull of the sun makes insertion of spacecraft in to orbit
highly challenging [5]. To date only the NASA Mariner 10 spacecraft during the
1970s and the NASA MESSENGER spacecraft in 2008-2012 have been successful in
this feat. The many unique features of Mercury pose questions on the origin of the
terrestrial planets and more significantly questions on why Mercury developed into
what can be observed today [7].
A few of the questions that still have to be explained are:
• Why is Mercury’s high uncompressed density much higher than the other terrestrial planets? (about 5.3 gcm−3 ).
• Why is Mercury so heavily cratered?
• What is the origin of the Mercury magnetosphere?
• What is the origin of the Mercury Exosphere?
• Why is the rotational period of Mercury so long?
Launched in 1973, Mariner 10 was the first dedicated Mercury mission. It was
carrying instruments for imaging (using dual television cameras and telescopes),
IR radiometry, extreme ultraviolet (EUV) spectroscopy, magnetometry, plasma and
charged particle characteristics, and radio wave propagation. The set of instruments
gave a complete picture of the so far unknown Mercury environment. The Mariner
probe made three Mercury fly-bys in 29.03.1973, 21.09.1974 and 16.03.1974 which
revealed the existence of a weak magnetic field [8], provided television images of 46%
of the planetary topography [10] and atmospheric data on particle abundances and
5
species. [11] In August 2004 the NASA discovery class orbiter MESSENGER (an
acronym of MErcury Surface, Space ENvironment, GEochemistry and Ranging) was
launched. After 3.5 years in hibernation it arrived at Mercury for a first fly-by in
January 2008. The MESSENGER orbiter carried instruments for both exosphere
particle studies as well as magnetospheric measurements and geological surveys. Its
six main scientific objectives were to characterize, [4]
(1) The chemical composition of Mercury’s surface
(2) The planet’s geological history
(3) The nature of Mercury’s magnetic field
(4) The size and state of the core,
(5) The volatile inventory at Mercury’s poles
(6) The nature of Mercury’s exosphere and magnetosphere.
During its two fly-bys and after the injection into the one year orbit phase, MESSENGER provided detailed data of the Mercury environment and found evidence of
previously suggested water ice in permanently shadowed impact craters close to the
poles[9]. The UVVS (Ultra Violet Visible Spectrometer) of the MASCS instrument
package was a spectrometer with two different detectors, one working in the FUV (far
ultraviolet) 150 nm - 190 nm the other in the MUV (middle UV) 160 nm - 320 nm.
The detectors are similar to the FUV/EUV detectors studied in this report only in
photon detection wavelength. The UVVS is a Ebert-Fastie diffraction grating spectrometer with two photomultiplier tubes mounted behind slits giving 1 nm of spectral
resolution [18].
The BepiColombo spacecraft is joint ESA/JAXA mission and is one of the designated planetary exploration cornerstone missions. Originally designed as a four part
6
mission BepiColombo aimed to further deepen the understanding of the Mercury environment and to complement the data collected by the MESSENGER orbiter. BepiColombo was originally designed with modules Mercury Planetary Orbiter (MPO),
Mercury Magnetospheric Orbiter (MMO), Mercury Transfer Module (MTM) and the
Mercury Surface Element (MSE). Due to budget constraints and technical issues the
MSE had to be cancelled, delaying surface probing of Mercury until the next Mercury proposals. The MMO and MPO conduct four Mercury fly-bys before injection
into the designated orbits. Both will be inserted into elliptical polar orbits with apohermion at 400 km, the MMO with perihermion at 12000 km, MPO with perihermion
at 1500 km. More information about BepiColombo will be provided in section 3.1
BepiColombo.
2.2
Mercury Particle Environment
Mariner found that Mercury, instead of a atmosphere has a particle environment
similar to an exosphere i.e the particles will behave purely ballistical, where the
exobase is situated at the planetary surface. The exosphere species identified by
the photometer on Mariner where in falling abundance: H,He and atomic oxygen O.
These species are main constituents of the exosphere and have their origin in the solar
wind.[11]
In 1985 ground-based observation made by Potter and Morgan with the MacDonald telescope discovered two distinct sodium emission lines in the Mercury exosphere
situated at 589.1 nm and 589.6 nm, see figure 2.2. In 1986 Potter and Morgan utilised
the NPO McMath-Pierce telescope and found two distinct emission lines at 769.69 nm
and 769.78 nm corresponding to potassium. Since these initial ground based emission
line findings the following species have been identified using ground based telescopes
[19].
7
• Sodium (Potter and Morgan, 1985)
• Potassium (Potter and Morgan, 1986)
• Calcium (Bida et al., 2000)
• Aluminium (Bida and Killen, 2010)
• Iron (Bida and Killen, 2010)
• Ca+ (Vervack et al., 2010; Bida and Killen, 2010)
In addition to these ground based observations, the observations made by the MESSENGER MASCS revealed further that the Mercury atmosphere contains Magnesium.
The main discovery made by the MESSENGER MASCS is the complex dynamics
of the Mercury exosphere. The three flybys have highlighted the exosphere’s nonuniform nature: MASCS has observed temporal variability, spatial inhomogeneities in
the surface flux, differences between exospheric species, and multiple source processes
contributing to the production of single species. The discovery of Sodium and Calcium
emission in a tail like structure in the anti-sun ward direction, that varies heavily on
a time scale of hours, and seem to be dependant of solar radiation pressure, affirmed
earlier theories of a dynamic exosphere made by ground observations. The origin of
the Sodium emission and the Calcium emission in the tail region are believed to be
different. The calcium tail appears symmetrical around the equatorial region where
it has its highest density whilst the Sodium has its source close to the poles, with a
clear sink close to the equatorial region.
Atoms in the exosphere heavier than hydrogen and helium predominantly originate
from the surface of Mercury. [14] The source processes are believed to be physical
sputtering of surface materials through solar wind interaction with the surface itself,
MMOD impacts, photoionisation and thermal desorption.
8
Figure 2.1: Sodium emission in Mercury exosphere. Observation by Potter and Morgan. Image adapted from [19].
9
2.3
Io Plasma Torus
Io is one of the Galilean moons of Jupiter. It is considered the most geologically
active body in the solar system and is hence an object of big interest. It orbits
Jupiter in a low radius orbit which is, in combination with its interaction with the
other Galilean moons, believed to cause Io’s active volcanism. Jupiter, Ganymede
and Europa’s gravitational influence on Io is believed to cause a tidal heating by the
caused interior friction of the core [6].The atmosphere of Io has been shown to consist
of mainly SO2 and small amounts of Na. The SO2 is deposited into the atmosphere
from volcanic eruptions and surface frost sublimation. Neutral S and O atoms are
deposited through surface sputtering. The neutral atmosphere around Io is spatially
limited to a region close to the planet as the average neutral particle lifetime is limited
by interaction of hot electrons and photons [22]. The dissociation energy required to
split SO2 into S an O is low, 5.6 eV such that dissociation by EUV photoionisation
occur. Observations first performed by Voyager showed that Io is situated inside
a plasma region, shaped like a torus around Jupiter, in the Io orbital plane. The
plasma torus consists of heavy ions that co-rotates with the Io orbital plane at a
higher orbital velocity than Io, as it is accelerated by the Jovian bulk plasma flow.
Io’s orbital velocity is 17 km/s whilst the corotational velocity of the plasma torus
is 74 km/s. This implicates that Io is inside a belt of heavy ions overtaking Io at a
relative velocity of 57 km/sec. The heavy ions collide with electrons in the Jovian
magnetosphere creating a population of electrons with very high kinetic energy. A
large portion of the energetic heavy ions constitute of higher order ionised atoms, i.e
O3+ , S 3+ and S 4+ which radiate in the EUV part of the spectrum. As a result the
Io plasma torus glows in the EUV wavelengths [23] [24].
The hot electron population and EUV photons acts to excite both neutrals and
ions in regions close to Io, thus adding heavy ions to the plasma torus. The heavy
10
ions are accelerated by the Jovian magnetic field and the rate at which particles are
added to the Jovian magnetosphere is one ton per second, making Io responsible for
98% of the heavy ions present in the Jovian plasmasphere [25] [29] .
11
Chapter 3
TECHNICAL DESCRIPTION
This chapter covers the technical description of the instruments developed in professor
Yoshikawa’s laboratory.
3.1
BepiColombo
BepiColombo was planned to be launched from Kourou, French Guiana, during July
2014 but will instead be launched during the backup launch window August 2015.
The key characteristics is summarised in table 3.1 adapted from I.Casteren.[15]
BepiColombo will be launched with MTM in the bottom connected to MMO,
connected to a solar shield needed during the cruise phase. Inside the solar shield
the MPO will be connected. See fig.2 . The spacecraft will be stoved inside a nosecone of a Ariane 5 rocket. The orbital transfer/cruise phase will utilise a number of
gravity assist manoeuvres that orbit Earth once, Venus twice and Mars five times
(EVVMMMM-M) and will last until mid 2020 [21]. The BepiColombo mission scientific objectives are to investigate the following:
• Origin and evolution of a planet close to the parent star
• Mercury as a planet: form, interior, structure, geology, composition and craters
• Mercury’s vestigial atmosphere (exosphere): composition and dynamics
• Mercury’s magnetized envelope (magnetosphere): structure and dynamics
• Origin of Mercury’s magnetic field
12
Table 3.1: BepiColombo key characteristics
BepiColombo
MPO
MMO
Launch
July 2014
Spacecraft
Dual (Planetary and Magnetospheric Orbiter)
Trajectory
EVVMMMM-M Electric propulsion
Cruise duration
≈ 6 yr
Arrival (MOI)
Second half 2020
Orbital mission duration
1 yr + 1 yr optional mission extension
Altitude
400x1508 km
400x11824 km
Period
2.3 h
9.3 h
Inclination
90◦
90◦
Argument of periherm
16◦ N-16◦ S
2◦ S
Number of experiments
11
5
Mass
80 kg
45 kg
Power
100-174 W
90 W
Launch mass
4200 kg including Launch Adapter
Mass in Mercury orbit
1147 kg
Propellant mass
816 kg chemical + 500 kg electrical (xenon)
Delta-V
1065 m/s chemical + 5025 m/s electrical
Downlink
1550 Gbits/yr
275 kg
Solar Array power in Mer- Aph. 1565 W Perih. 935 W
cury orbit
13
100 Gbits/yr
Aph. 348 W Perih. 450 W
Figure 3.1: Artist depiction, exploded view of the BepiColombo spacecraft. Image
credit: ESA [17].
• Test of Einstein’s theory of general relativity
In order to fulfil these objectives the mission consists of two orbiters; MMO that
is mainly developed by JAXA and MPO that is mainly developed by ESA. The
orbiters will be injected into coplanar elliptical orbits at different height. MPO will
orbit Mercury at a low height in its search for mainly particle events. MMO will
be orbiting at a greater height. The MMO instrumentation package is focused on
magnetospheric processes . The orbiters scientific instruments have been carefully
selected in order to fulfil the scientific objectives and should be able to provide a full
understanding of the Mercury environment see table 3.3 and table 3.2 adapted from
I.Casteren [15].
Many of the MMO and MPO instruments will be working synergistically, looking
at the same phenomena but in different scales (local vs. regional) or parts of the
spectrum. The mission is deviced in order to keep track of solar particle events and
14
Table 3.2: MPO scientific instruments
PI and Co-PIs
N. Thomas, CH,
and T. Spohn, D
BELA - BepiColombo Laser Altimeter
V. Iafolla, I
ISA – Italian Spring Accelerometer
K.H. Glassmeier, D
MERMAG – Magnetic Field Investigation
H. Hiesinger, D
MERTIS – Mercury Radiometer and Thermal Imaging
Spectrometer
I. Mitrofanov, RUS
MGNS – Mercury Gamma-Ray and Neutron Spectrometer
G. Fraser, UK
MIXS – Mercury Imaging X-ray Spectrometer
L. Iess, I
MORE – Mercury Orbiter Radio Science Experiment
E. Quémerais, F
PHEBUS – Probing of Hermean Exosphere by UV Spectroscopy
S. Orsini, I
SERENA – Search for Exospheric Refilling and Emitted
Natural Abundances
J. Huovelin, FIN
SIXS – Solar Intensity X-ray and particle Spectrometer
E. Flamini, I
SIMBIO-SYS – Spectrometers and Imagers for MPO
BepiColombo Integrated Observatory System
Table 3.3: MMO scientific instruments
PI and Co-PIs
W. Baumjohann, A
MERMAG – Mercury Magnetometer
Y. Saito, JPN
MPPE – Mercury Plasma Particle Experiment
Y. Kasaba, JPN
PWI – Plasma Wave Instrument
I. Yoshikawa, JPN
MSASI – Mercury Sodium Atmospheric Spectral Imager
K. Nogami, JPN
MDM – Mercury Dust Monitor
15
Figure 3.2: Artist depiction of MPO spacecraft. Image credit: ESA [17].
the MMO/MPO division gives an opportunity to study solar wind interaction with
the exosphere and surface through observation of local effects at the same time as
large scale effects. The hope is to clarify the sources of the Na, Ca etc. in the anti
solar ward tail and if there is any magnetospheric redistribution of particles active in
the exosphere[14].
The MMO instruments are mainly designed for in-situ plasma measurements and
electromagnetical field measurements of the Mercury magnetosphere. It carries instruments capable of detecting neutral, charged and dust particles as well as one
remote sensing instrument. The octagonal shaped spacecraft is 1.8 m in diameter
and 0.9 m in height. It weighs 275 kilos and holds its own cold gas thrusters (N2 )
for orbital control. Due to the high solar irradiance parts of the spacecraft will be
covered with solar reflectors to keep the orbiter at an acceptable temperature. When
ejected from the MTM and MPO, MMO will be spun to a spin stabilized state with
a 4 s rotational period (15 rpm). The high gain 80 cm array antenna will be de-spun
with with a designated motor to counteract the orbiter spin state.
The MPO instruments are focused at remote sensing, in-situ particle measure-
16
ments as well as a radio experiment. The spacecraft is a 1.6 x 1.7 x 1.9 m box shaped
structure that is mainly covered with MLI. One of the orbiter sides is a radiator pointing in the anti sun-ward direction to dissipate the heat from the solar radiation. 5 out
of 6 sides are at some time in direct sunlight thus driving up the requirements on the
spacecraft heat conduction properties. MPO holds 11 scientific instruments which
are mostly mounted in the nadir side of the spacecraft. Some of the instruments are
situated at the radiator in order to cool the detectors as much as possible, PHEBUS
is situated at the main radiator in order to get its required calibration FOV. After
launch MPO will be responsible for all spacecraft communications via its two fixed
Low-Gain Antennas (LGAs), its steerable Medium-Gain Antenna (MGA) and the
steerable one-metre-diameter High-Gain Antenna (HGA), all in the X-band. During
the cruise phase MMO will be in a hibernation state and all power will be drawn
from the MTM.
After separation MPO will deploy its single sided solar array. The array is mounted
on a rotational boom this in order to prevent damage from overheating. The boom
keep the array surface at an angle towards the sun generating ≈ 1000 w of power.
MPO is also equipped with star-trackers, sun sensors, Inertial Measurement Units
(IMUs), reaction wheels and hydrazine/MON-3 thrusters for attitude corrections.
In addition to the two scientific orbiters there is the Mercury Transfer Module
(MTM) that carries the necessary propulsion required to brake BepiColombo as it
gets deeper into the solar gravitational well and to reach the point of MMO and MPO
orbit insertion into their Mercury orbits.
The interface structure for mounting together MMO and MPO is called MMO
Sunshield and Interface Structure (MOSIF). It is a MLI covered semi-cylinder cut
at an 16◦ angle designed to keep the MMO from overheating during the interplanetary cruise phase as well as minimising the vibrations during MMO spin up before
separation. [17]
17
3.1.1
Phebus
PHEBUS Probing of Hermean exosphere by ultraviolet spectroscopy (PHEBUS) is
the dual EUV/FUV spectrometer onboard the MPO orbiter. PHEBUS will be mapping the Hermean exosphere in wavelengths previously never mapped in search of
even higher energetic photon emission. It is known that the Mercury exosphere contains Sodium, Potassium, Calcium, Iron and Ca+. Recent observations made by the
MASCS instrument on MESSENGER showed that there is magnesium present as
well[18]. The PHEBUS EUV spectrometer on BepiColombo that maps Mercury in
the range 55-150 nm shall be able to reveal additional exosphere species in the UV
spectrum range where sulfur, carbon, OH, Ca+ and Mg+ have their emission lines.
The EUV detector may also be used to search for resonance lines of H, He, He+
(121.6, 58.4 and 30.4 nm) in the inner heliosphere as a sign of solar wind interaction
with interstellar gas.
PHEBUS Objectives
The PHEBUS objectives can be divided into two categories and are taken directly
as stated in E. Chassefiere’s article PHEBUS: A double ultraviolet spectrometer to
observe Mercury’s exosphere [16]. - Scientific Objectives
The core scientific objectives of PHEBUS, oriented toward better understanding the coupled surface–exosphere– magnetosphere system, may be summarized as
following:
• Composition and vertical structure. From vertical scans of the exospheric composition, information about the scale heights of the different species, and their
possible variations with altitude denoting the presence of differently generated
populations, will be obtained all around the planet, providing information about
composition, temperature, release processes, etc.
18
• Dynamics: day to night active to inactive regions circulation. The complete
local time and latitude coverage will allow to follow species from day to night.
The significant longitude coverage will allow to get information about local
transient active regions and episodic transport in the exosphere.
• Surface release processes and sources. By measuring the 3-D fields of different
species, produced by different release mechanisms (e.g. sodium by thermal
desorption and calcium by sputtering), it will be possible to establish maps of
the ratios between two specific species used as a signature of a certain release
mechanism, and to characterize systematic and/or local (in space and/or time)
deviations signing this release mechanism.
• Dynamics of ionized species and the correlation with neutral atmosphere. A
few ions are expected to be detected (e.g. Mg+, S+, C+, etc.) and mapped
as a function of time, together with their source neutral species, which would
allow to characterize the formation and dynamics of ions in the exosphere.
• Exosphere–magnetosphere exchange and transport processes. Characterizing
ions and neutrals at the interface with the magnetosphere, synergistically with
MMO measurements, should allow to follow planetary ions from their formation
region in the exosphere, through the magnetosphere, until escape or re-injection
into the exospheric system through the magneto-tail.
• Escape, source-sink balance, geochemical cycles. Measuring the escape rates of
species is of tremendous interest to characterize, synergistically with the results
of geochemical instruments ( like the X-ray spectrometer), the composition of
the eroding regolith. Comparing the escape rate and the exospheric density for
each species, it will be possible to characterize the residence time of this species
in the regolith–exosphere system and to constrain recycling to the regolith, and
19
more generally geochemical cycles and source/sink balance. Finally, if noble
gases are detected, the present outgassing activity may be characterized, as
well as (tentatively) the history of solar wind particle implantation.
• Search for surface ice layers in polar regions. Some observations on the dark side
of Mercury will be dedicated to the search for water ice which may be present
in some craters at high latitude. Indeed, some craters close to the poles never
receive direct sunlight from the Sun and some water ice brought by comets impacting Mercury may have accumulated there. On the night side of the planet,
the main source of Lymanα radiation is caused by the scattering of solar photons by hydrogen atoms in the interplanetary medium. This creates a glow at
121.6 nm which lights the night side of Mercury. At high ecliptic latitudes, this
emission is close to 500 R and varies by one or two hundred Rayleighs with the
solar cycle. If present, water ice will be detected by variations of the surface
albedo at 121.6 nm. Assuming that the mean UV albedo of Mercury is close to
the value of the UV albedo of the Moon, that is around 4%, we should get a signal around 20 R. For water ice, the albedo at 121.6 nm is close to 2% (Hendrix
and Hansen, 2008). In that case, we should see a decrease of the signal by a
factor of two, that is 10 R in that case, when the line-of-sight(LOS)reaches a surface covered with water ice. The actual observations maybe more complicated
according to the actual UV albedo value of the surface. A similar idea is being used on the Moon by the LymanAlphaMappingProject(LAMP)instrument
(Stern et al.,2004) on the Lunar Reconnaissance Orbiter to try and find the
presence of water ice in lunar craters.
The main measurement objectives of PHEBUS are:
• To detect new species, including metallic species (Si, Mg, Fe, etc.), atoms (C,
N, S, etc.), molecules and radicals (H2O, H2, OH, CO), noble gases (Ar, Ne),
20
ions(He+, Na+, Mg+, etc.), in addition to already detected species (Na, K, Ca,
O, H, He).
• To measure an average exosphere (number densities of constituents, vertical
structure), with as much as possible species monitored together, at different
positions of Mercury around the Sun. Averaging over 1/8 of Mercury’s year,
that is on a timescale of 10 Earth days, is appropriate.
• To measure sharp local and temporal variations of the exosphere content (timescale:
less than a few hours), at specific times and places of interest.
• To search for albedo variations of Mercury’s night side surface, lighted by the
interplanetary H Ly-α glow, at 121.6 nm, in order to exhibit possible signatures
of surface ice layers (H2 O, SO2 , N2 , CO2 , etc.) in high- latitude polar craters,
and any other signature of interest on the night side.
21
PHEBUS Technical description
The PHEBUS instrument is seen in figure 3.3 . The instrument consists of:
Figure 3.3: Phebus qualification model (QM) Image credit: CNES[34].
• Scanner head with entrance baffle and off-axis parabolic mirror
• Holographical grating
• Light detector with high speed shutter
• Two NUV detectors
• EUV detector
• FUV detector
22
The instrument is French-led (PI E. Quemerais, LATMOS and co-PI F. Leblanc,
LATMOS) and implemented in a cooperative scheme involving Japan (EUV/FUV
detectors), Russia (scanner system) and Italy (ground calibration)[12]. The PHEBUS
scanner head contains a entrance baffle as well as an off-axis mirror that focuses the
incoming light towards the gratings further within the instrument. The Scanner head
is mounted on a stepper motor that rotates 360◦ at a pace of 4◦ /60s at an accuracy of
0.1◦ . This rotation together with the MPO orbital and spin motion gives PHEBUS
the coverage required to meet its measurement objectives. Two Hamamatsu photodiodes are mounted inside the entrance baffle to measure the incoming illumination
levels. If the levels are outside a preset value the scanner head FPGA (dedicated for
stepper motor control, photodiode level surveillance, shutter hall sensor surveillance
and communication with the main electronics of PHEBUS) will automatically shut
the entrance baffle shutters in order to protect the detectors from destructive illumination. Inside the scanner head there is a slit that is used as it defines the instrument
field of view. The slit is situated in a way that, taking the orientation of PHEBUS in
MPO into consideration, makes the IFOV 1.9 x ≈ 0.095◦ . The slit is hence oriented
in a way that the large proportion of the slit is parallel to the planetary limb, to get
accurate vertical limb scans. During calibration this grating has to be removed as the
IFOV is smaller than the calibration targets (selected stars). It is hence mounted on
a movable arm so that it can be removed during calibration. As seen in figure 3.4 the
incoming photons now impinge on a set of two holographical gratings, one for FUV
and one for EUV. The gratings are made of aluminium covered in higly reflective
platinum. The main design parameter driving the need of holographical gratings is
the UV sensibility to reflections, the detectors flat surfaces inability to correct for
abberation (which means that the spectral resolution requirements cannot be met).
The requirements to detect faint emission lines that are close to bright emission lines
put high demands on surface roughness. Rough surfaces scatter uv light in a way
23
that makes faint emission sources undetectable, they get smeared into the nearby
bright emission lines. Holographic gratings fulfill the requirements with low surface
roughness and no or low abberation.
Figure 3.4: Phebus optical design. Image adapted from Chassefière [16].
The Mercury exosphere contains strong emission lines in K (404.7 nm) and Ca
(422.8 nm) and the PHEBUS instrument has hence been fitted with two dedicated
detectors for these species. Following the optical path of the FUV part of the grating
a portion of the reflected light is collected towards the center of the instrument. The
24
NUV photons are detected by 10-stage bi-alkali photomultipler tubes (PMT), sensitive
between 300 and 650 nm. The NUV detectors are connected to a high voltage supply
(≈ 1000v) circuit board and a voltage divider/pre-amplifier circuit bord.
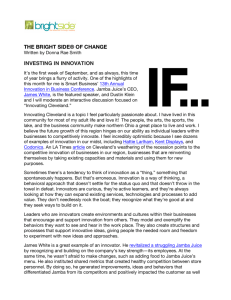
The FUV detector is almost identical in design to the EUV detector. They consist
of detector system of five Multi Channel Plates (MCP) mounted above a Resistive
Anode Encoder (RAE). See 3.5. The MCP input is covered with a photocathode that
has its maximum spectral response in the EUV/FUV wavelengths. The photocathode
will convert the incoming EUV/FUV photon to an electron. The electron will hit
the top of the MCP surface. This will cause an avalanche of electrons through the
MCP structure, amplifying the amount of electrons caused by the photon event. The
MCPs are kept at accelerating voltages that make the electrons accelerate towards
the RAE. The RAE corners are connected to four analog readout electronic chains,
detector frontend electronics. The frontend electronics react to the incoming charge
and shape, discriminate and digitize the electron event amplitude. The digitized
values are passed to a field programmable gate array (FPGA) controlled by gating
logic signals from the frontend electronics. The FPGA compares the four channels
charge amplitude and by amplitude ratios a 2-D event position can be calculated.
The FUV detector has an input window made of MgF2 that is transparent to
photons above 121 nm. This makes the detector protected from all EUV photons. The
backside of the window is covered by a CsTe photocathode coating that is sensitive
to incoming photons in the range 120 nm - 330 nm. The input window on the top of
the detector and a ceramic plate mounted in the bottom of the detector are designed
to keep the detector interior at vacuum at all times to protect the five stage MCP
from atmospheric contamination prior to launch. Reasons for this will be explained
in a section about MCPs. The five stage MCPs are arranged in a configuration
where two MCPs are mounted closely together (called a V-stack) at the top of the
detector followed by a three stage detector mounted above the RAE (three stage is
25
Figure 3.5: EUV/FUV detector design, showing HV, voltage divider, photocathode,
V-stack MCP, Z-stack MCP and RAE. Image adapted from Murakami [28].
called Z-stack). Connected across the front and back face of each individual MCP
is a accelerating voltage provided by a high voltage supply (HV). In the case of
UV photon detection the polarity of the detector frontside accelerating potential is
not of importance from a particle capture perspective, and is as such kept at the
recommended negative polarity -3.2kV. This makes the application of the RAE easy
as it is kept at ground potential. The negative polarity HV is connected to a voltage
divider circuit that is connected in a crossed pattern between the inputs and outputs
of the individual MCPs, in order to keep each MCP face at a by experiments decided
optimum voltage. The MCP gap accelerating voltages has been shown to affect
the detector pulse height distribution (PHD) and has been optimised for maximum
contrast and spatial resolution. [28]
The EUV detector is designed in the same way as the FUV detector. The detector
is situated behind a hatch with a MgF2 window that can be opened by a paraffin actuator. The MgF2 window is impenetrable by EUV photons and needs to be removed
26
Table 3.4: PHEBUS EUV Detector Overview
Spectral resolution
1 nm
Spatial resolution
0.28◦ @ 15 km projected size
Photocathode material
CsI
Photocathode thickness
0.3 µm
MCP Capillary diameter
12µm
MCP Capillary angle
13µm
MCP Capillary Length/Diameter ratio
40:1
MCP Resistance
125 MΩ
MCP Diameter
40 mm
RAE Sheet resistivity
40kΩ/
RAE Border resistivity
500Ω/cm
RAE Sheet material
Rb
RAE Electrode material
Au
RAE Effective area
20 x 40 mm
during data aquisition. The reason for the movable window design is that the photocathode used for the EUV detector is CsI that is highly sensitive to moisture. The
photocathode is coated onto the top of the V-stack MCP and must be kept at high
vacuum during all times prior to launch (with exception for vibrational and thermal
testing). The moisture of the orbiter must be outgassed before the window can be
opened and the photocathode can be exposed directly to incoming photons. The
EUV detector has because of this an ion pump connected to its housing that will be
removed as late as possible before launch [16] [28].
27
Detector MCP
MCP are glass wafers made up by an array of capillaries fused together. The inside
walls of the capillaries have been processed to provide a specific resistance. When an
electron enters the capillary and hits the capillary wall a secondary electron will be
emitted in a parabolic trajectory from the wall. The MCP back face is kept at an
accelerating potential compared to the front face. This makes the electron follow its
trajectory towards the MCP back face. On its way through the capillary the electron
will cause an avalanche of wall emitted electrons as the trajectory curvature radius is
much larger than the capillary diameter. Properties that govern the characteristics
of a MCP is its thickness, the capillary bias angle αand the electrode evaporation
depth. MCPs are highly resistive devices in the range 5 MΩ − 500 MΩ.
Detector RAE
A 2-D Resistive Anode Encoder (RAE) is a thin ceramic plate with a layer of highly
resistive RuO2 deposited on the anode surface. Depending on design, gold read-out
electrodes are etched to the plate at either each vertices or at the sides of the anode.
The RAE functions as follows, charge is injected into the surface from the output-face
of the MCP. The resistive sheet acts as a charge divider, delivering a proportional
amount of the charge to each corner of the anode, thus enabling a position read-out by
either channel rise time measurements or by channel charge amplitude division. The
RAE electrodes are kept at virtual ground as they are connected to pre-amplifiers.
The RAE is prone to stray capacitance if the back wall is not insulated properly. The
spatial resolution of a RAE is governed by its resistivity and capacitance which govern
the electrode signal rise-time, in combination with the expected incoming photon flux
together with a carefully selected shaping amplifier time constant. Induced electrical
noise from the detector HV as well as stray capacitance generated by the MCP-
28
to-RAE gap and the stray capacitance to ground together with the small intrinsic
capacitance within the material itself cause additional delay, hence lower resolution.
RAE important parameters will be further discussed in chapter 5.
Detector frontend electronics
The EUV/FUV detectors utilise four readout channels (one per RAE corner). The
charge cloud is diffused through the RAE resistive layer and enters the radiation
hardened amplifer circuitry. All electronics is chosen to handle the harsh environment
in the MPO orbiter, with regards to temperature, radiation and power consumption.
The charge is accumulated in an Amptek A225 hybrid amplifier that is a combined
charge sensitive amplifier/pulse shape amplifier. The initial charge amplifier signal
is splitted before the pulse shaper and redirected to a timing output. The timing
signal has a rise time of 18 ns and is sent to Amptek A206 voltage amplifier(VA)/low
level discriminator(LLD) that is connected with the VA bypassed to form a high
speed discriminator signal that acts as a timing pulse for the FPGA sampling. The
discriminator threshold level is set by a 4.5 - 5.5 v reference voltage and a variable
voltage, both controlled by the FPGA. The shaping amplifier rise time is nominally
2.4µs for unipolar use but is driven in a bipolar mode where the output rise time is
≈ 2µs. The bipolar output is connected to a Amptek PH300 peak hold that gets a
signal from the FPGA after it has received the timing signal from the LLD, that sets
the gate input to high, allowing for sampling on the input. The PH will ramp up
the amplitude to the maximum amplitude until the gate is set low. The output is
sent as an analog out to an Maxwell7809LP 16-bit ADC set to work on the external
clock provided by the FPGA. The external clock frequency is set to 8 MHz and since
the ADC outputs data every 16 clock cycles, the full 16-bit digitized output will be
provided every 2µs.
29
3.2
EXCEED
SPRINT-A/EXCEED will be launched in 2013 as part of the ISAS/JAXA program
for small scale satellites. EXCEED will be looking at the flux rate of the escaping
atmospheres of Venus and Mars as well as the plasma torus around Jupiter’s moon Io
in EUV wavelengths. The hope is to investigate the solar wind intensity to particle
escape rate dependencies. The satellite bus is a new type of structure that will be
evaluated for future Japanese small scale mission. The main scientific instrument
onboard is a EUV detector together with a high precision guidance camera for the
detector.
The mission will be launched with a solid fuel booster from Tanegashima, Kyushu.
30
Chapter 4
CALIBRATION EXPERIMENTS
4.1
RAE charge leakage
Laboratory measurements of a RAE response to injected charge had shown signs of
it leaking charge, i.e. the charge collected at the output was significantly smaller
than the charge injected into the anode. The reason for this was believed to be
a significant stray capacitance somewhere between the RAE and the pre-amplifier.
In order to evaluate the performance of the anode charge injection simulations and
experiments were made.
In order to protect the input of the amplifiers from too much incoming charge
and to create a RAE input signal with charge similar to the MCP generated electron
cloud, a charge-box (C-box) was simulated and constructed. In order to create a 1
pC RAE input charge the C-box was designed according to equation 4.1.
Q=C ∗V
(4.1)
Hence the C-box was constructed as a 1 V sawtooth input to a 1 pF capacitor with
a 50 Ω resistor connected to ground, for schematics see the first stage in the RAE
OrCad PSpice simulation schematics in figure 4.1. The input frequency was set to
26.6 kHz in order to generate a 3.75 µs rise time. The RAE was simulated as a
series of resistances with stray capacitance distributed between the resistive sheet
and ground, simulated as 2 pF capacitances between the resistors and ground.
The RAE was simulated successfully and the results showed the expected tendencies with increased charge up/discharge time the further from the input the measurement was taken as seen in figure 4.2.
31
Figure 4.1: RAE simulation schematic in Orcad PSpice.
The anode was mounted on a three axis µm precision bed with a acrylic glass
plate in between the bed and the PEEK (ultra-high vacuum plastic) insulation layer
mounted on the back of the RAE. The detector readout electronics consisted of four
Amptek A225 hybrid amplifiers, one for each output electrode connected via SMA cables. The amplifier pulse shape outputs were connected to a four channel oscilloscope
which provided simultaneous measurements of all channels, see figure 4.3.
In order to make measurements of the position the amplifier needed to be calibrated against a know input charge. The C-box output was connected directly into
the four amplifier channels and a 1 pC amplification constant for each channel was
calculated. It was found that the cables were a source of charge loss and the calibration was redone but with the 1 pC charge injected directly into the RAE vertice
output electrodes.
3 pC charge was injected into the RAE surface through a BNC banana plug. The
banana plug was fixed in a position and the RAE was moved to create the position
measurements.
Position measurements were made in an L-shape in the central area of the anode
and shown to be correct and seemingly linear over the area tested. The test was
32
** Profile: "SCHEMATIC1-Bias" [ C:\Users\Philip\Documents\Master Thesis\th...
Date/Time run: 04/20/12 17:53:35
Temperature: 27.0
(A) thesis-SCHEMATIC1-Bias
900f
800f
700f
600f
500f
400f
300f
200f
100f
0
0s
S(I(R2))
Date: April 20, 2012
20ns
S(I(R3))
40ns
S(I(R4))
60ns
S(I(R5))
Time
Page 1
80ns
Time: 20:00:52
Figure 4.2: RAE charge/discharge characteristics.
33
100ns
S(I(R6))
A225
A225
OSCILLOSCOPE
CH1, CH2, CH3, CH4
1 V Sawtooth
C-Box 1 pC/V
RAE
A225
A225
Figure 4.3: Block diagram leaking charge measurement experimental setup.
redone within a central square shaped area and in a point close to the RAE vertices.
The results as calculated by equations,
Qx ≡
(i1 + i4 )
x
=
i0
d
(4.2)
Qy ≡
(i2 + i1 )
y
=
i0
d
(4.3)
can be seen in figure 4.4 and figure 4.5.
It was show that the applied input mechanical pressure had significant effect
on the resulting readout amplitudes and was set to a fixed value throughout the
measurements.
It was shown that 50-60% of the input charge reached the output terminals for the
chosen connector pressure, see figure 4.6. However increasing the pressure by raising
the bed 500 µm increased the output charge to input charge ratio to the region of
80%. The mechanical strain on the anode with the applied pressure was deemed to
be close to the mechanical limitation of the brittle anode.
Measurements in the corners of the anode showed that the total collected charge
increased but the position determination become less accurate.
34
Figure 4.4: Charge division results L-shaped measurement.
Figure 4.5: Charge division results Square-shaped measurement.
35
Figure 4.6: Charge input/output ratio during probe injection test.
An attempt on directly measuring the stray capacitance was made where the time
constant between the point of charge input and the amplifier output was measured for
a large set of input positions. By utilising equation 4.4, and knowing the resistance/cm
across the RAE, the intention was to calculate each channels stray capacitance to
ground as a function of RAE position. The test resulted in a approximation on the
capacitance, ≈ 84.67pF between the central region of the anode and and the amplifier
output.
τ = 0.63 ∗ RC
(4.4)
The charge experiments showed signs of charge loss in the cables and additional
loss of up to 40% of the input charge most probably due to the injection method. To
verify that the loss was due to the injection method an additional test was performed
utilising a different charge injection method.
The RAE was placed behind a MCP connected to resistive voltage divider (bleeder
circuit) in turn connected to a HV-source. The the front-face of the MCP was covered
by a mask with with a pin-hole grid. The setup was mounted onto a gimbal inside
a vacuum-chamber. A monochromator was connected to the chamber and in turn
36
connected to a deuterium arc lamp. The chamber was evacuated for 48 hours before
commencing operation in order to reach stable high vacuum conditions (p ≈ 5e-5 Pa).
After verifying the bleeder circuit resistances and cross RAE resistances the HV was
turned on and decreased with -100 V/min until at -2.6 kV where dark counts were
done. The decrease in voltage continued until it reached operational MCP voltage,
-2.9 kV.
The monochromator was set to 1135 Å, on the left flank of the emission intensity
maximum, which resulted in a suitable electron count rate at 18000 electrons during
a 100 s exposure. Measurements were done during 30 s exposures and the result can
be seen in figure 4.7 with count rate across a line of the RAE in figure 4.8.
Figure 4.7: Grating test results.
37
Figure 4.8: Electron count along a vertical line in the grating.
4.1.1
Discussion
The vacuum chamber test results showed no sign of image distortion or uneven distribution of counts that could be related to a stray capacitance. The addition of a MCP
in front of the RAE will cause additional capacitance as it creates a parallel plate
capacitor. The effect of having a MCP mounted in front of the RAE was studied and
the increase in total capacitance is calculated according to equation 4.5,
C=
A
d
(4.5)
Where is the permittivity of the material between the plates, A the plate area, d
the separation.
For the 5cm2 RAE with relative permittivity r ≈ 1 the additional capacitance
was found to be 22.13 pF.
The leaking charge was hence believed to be a probe injection problem. The
probe position measurements were done to verify the linearity and functionality of
the square Gear anode provided. The results showed a significant loss in the input
to output charge ratio. The loss of charge in the cables between the RAE and the
amplifier was removed from the measurements.
The entire setup was covered in aluminium foil and interconnected to create a
38
ground plane insensitive to electrical noise. The output showed that by using ratio
calculations the positions could be recovered. As seen in the results the precision
is low, perhaps in the order of millimetre although the bed has µm- precision- This
is probably due to the setup movement while changing measurement point and also
possible overnight movement due to earthquakes. The charge into the RAE was
found to be pressure dependent and deemed to be a Probe injection problem. The
contact resistance between the probe tip and the surface is the reason for “leaking
charge”. The surface of probes are never smooth and thus create small areas of charge
conductance. In order for proper conduction to occur the probe must penetrate the
coating of the RAE in order to create a metal-to-metal bond. This is a not suitable
with a RAE seeing it is a brittle ceramic plate. According to probe theory the probe
should be as sharp and thin as possible to create the best conduction [26]. This is
not possible with the RAE as it would not cope with the high structural pressure.
Hence a recommendation is to use an electron gun where an exact amount of injected
electrons are defined, to further evaluate if there is an intrinsic stray capacitance in
the RAE. All parts of the test point towards the contact resistance causing the illusion
of a stray capacitance.
39
4.2
Detector capacitance measurement
In order to measure the capacitance of the EXCEED EUV-detector two different
approaches have been studied. The difficulty of the problem is the low values of
capacitance expected in the detector. The performance requirements of the measurements were set at 2 pF resolution and 5% accuracy. The first approach studied was
analogue electronic circuits based on variations of the Wheatstone bridge. The theory of the Wheatstone bridge is to balance two branches of a bridge circuit in order
calculate a value of the unknown capacitance. The Wheatstone bridge can be seen in
figure 4.9. A Sinusoidal signal source is connected to four resistors in two branches.
A null-detector is connected across the middle of the bridge. For the bridge to balance the resistance of the two branches should be equal, thus removing any potential
difference between the two branches. The result is a zero reading on the null-detector
in other words no current flowing between the two nodes seen in figure 4.9.
Figure 4.9: Wheatstone bridge layout. Image adapted from [27].
If resistor R4 is changed to an unknown resistor and resistor R1 is changed to a
trim potentiometer a reading of the unknown resistance can be made. When the null
meter gives a zero reading the bridge is balanced and the unknown resistance value
40
can be read from the trim potentiometer. Mathematically the Wheatstone bridge is
expressed as;
R1 /R3 = R2 /R4
(4.6)
The same principle can be extended to impedance measurements of LRC bridges as
was done in the Wien parallel bridge and the Schering bridge. Instead of balancing
resistance it is impedance that is balanced [27].
The balancing of the analogue circuits were found to be very sensitive to stray
capacitance between the bridge arms and ground. To reduce the effect of the stray
capacitance a switched Wagner grounding was introduced to the analogue circuits.
Wagner grounding is based on matching the impedance between the measurement
point and ground with a capacitor and a trim pot. By switching the measurement
points grounding between the Wagner earth and then balancing the bridge and the
common earth and rebalancing the circuit the stray capacitance can be minimized.
A second approach to measure the capacitance which proved more accurate was
the digital RC timer based approach. A microcontroller is used together with a
external crystal oscillator. When measuring a capacitance the capacitor is added
to a voltage divider network connected to the microcontroller analogue comparator
inputs. By measuring the transient while charging up the capacitor the capacitance
can be deduced. The microcontroller has a high accuracy in time measurements with
its oscillator at 12 MHz giving high resolution by the number of accumulated clock
pulses during the RC-circuit’s charge up time until the set voltage threshold.
41
4.2.1
Bridge test circuits
Wien Parallel Bridge
In order to calculate the zero condition for the Wien parallel bridge the impedance
in the two bridge arms must be balanced. Cx is the unknown capacitance to be
measured. There is one frequency at which impedance balance occurs (the frequency
dependent reactance and the resistance are equal in the two arms). Balancing the
circuit in Figure 4.10 means adjusting R4 and C2 until the current between points A
and B becomes zero. This happens when the voltages at points A and B are equal.
When the Wien Bridge is balanced, it follows that R2 /R1 = Z1 /Z2 where Z1 is the
impedance of the arm containing C1 and Z2 is the impedance of the arm containing
C2 . Mathematically, when the bridge is balanced,
R2 /R1 = (1/ωC1 + R3 )/(R4 /[ωC2 (R4 + 1/ωC2 )])
(4.7)
where ω = 2πf ;
R2 /R1 = (1/ωC1 + R3 )/(R4 /[ωC2 R4 + 1]);
(4.8)
or
R2 /R1 = (1/ωC1 + R3 )(ωC2 + 1/R4 );
(4.9)
or
R2 /R1 = C2 /C1 + ωC2 R3 + 1/(ωC1 R4 ) + R3 /R4
.
42
(4.10)
The bridge balance condition is valid when capacitive reactance cancels out,
R2 /R1 = C2 /C1 + R3 /R4
(4.11)
C2 /C1 = R2 /R1 − R3 /R4
(4.12)
Utilizing that a Wien Bridge is frequency-dependent one can determine the capacitance in C1 or C2 . The frequency f at which the Wien Bridge in Figure 1 becomes
balanced is the frequency at which,
ωC2 R3 = 1/(ωC1 R4 ),
(4.13)
f C2 R3 = 1/(2πf C1 R4 ).
(4.14)
or
Thus, the frequency f is given by the following equation:
p
1/R3 R4 C1 C2 .
(4.15)
C2 = 1/(2πf )2 ∗ R3 R4 C1
(4.16)
f = 1/2π
C2 can hence be expressed as:
Simulations were carried out in OrCAD PSpice as seen in figure 4.11 for different
values of the bridge components in order to determine their optimum values. As seen
in the simulation output in figure 4.12 a clear minimum can be found at the frequency
given by equation 4.15. The simulations were carried out for a number of values of the
resistors and capacitors. As expected the zero frequency is lowered when using larger
resistor values. A low resistor value gave zero frequencies in the range 10-100 MHz
which is impractical when building the circuit. The simplest solution to balancing
the circuit was to choose R1 = 2R2 and R3 = R4 and all resistor values in the region
of 10 k Ω.
43
Figure 4.10: Wien parallel bridge layout. Image adapted from [27].
Figure 4.11: OrCAD PSpice schematic of the Wien parallel bridge.
44
Figure 4.12: OrCAD PSpice simulation results of the Wien parallel bridge with minimum amplitude at 159 kHz corresponding to C2 = 1nC as calculated.
AC SOURCE
WIEN BRIDGE
10V AC 1Hz-15MHz
OSCILLOSCOPE
NULL DETECTOR
OSCILLOSCOPE CH1 - CH2
Figure 4.13: Wien parallel bridge box diagram.
45
A breadboard model was constructed and tested with a input frequency sweep
ranging from 1 Hz to 10 MHz, R1 =2R2 =1 kΩ, R3 =R4 =10 kΩ. Connecting reference
capacitances of known values to the C2 position gives the possibility to determine the
accuracy of the method. Utilizing equation 4.16 the value of C2 was determined from
the minimum response frequency.
Measurements were taken with two channels on a digital oscilloscope between the
two bridge arms. The output is summarized in table 4.1 below.
The measured output showed a similar behaviour as the simulation and calculation. However the sensitivity of the circuit was low and the zero frequency was not a
narrow valley rather a smooth continuum with a minimum amplitude 1-2 V below the
input voltage. The center frequency of the minimum response amplitude was situated
far below the calculated values in the region of 500 Hz during all tests (calculated
15-225 kHz). This corresponds to a C2 capacitance in the range 10 µF. The results
were considered faulty and hence discarded.
46
Table 4.1: Results Wien bridge
R3 =R4 =
10 kΩ
Test C1
Test C2
Calculated frequency
PSPICE frequency
Measured Frequency
1,00E-09 F
5,00E-12 F
225079,079 Hz
224313 Hz
f → 500 Hz
1,00E-09 F
3,00E-12 F
290575,8416 Hz
290367 Hz
f → 500 Hz
1,00E-09 F
1,00E-11 F
159154,9431 Hz
159162 Hz
f → 500 Hz
1,00E-09 F
2,20E-11 F
107302,2407 Hz
108203 Hz
f → 500 Hz
1,00E-09 F
4,40E-11 F
75874,14207 Hz
76172 Hz
f → 500 Hz
1,00E-09 F
1,00E-10 F
50329,2121 Hz
50148 Hz
f → 500 Hz
1,00E-09 F
1,00E-09 F
15915,49431 Hz
16115 Hz
f → 500 Hz
1,00E-08 F
5,00E-12 F
71176,25434 Hz
-
f → 500 Hz
1,00E-08 F
3,00E-12 F
91888,14924 Hz
-
f → 500 Hz
1,00E-08 F
1,00E-11 F
50329,2121 Hz
-
f → 500 Hz
1,00E-08 F
2,20E-11 F
33931,94788 Hz
-
f → 500 Hz
1,00E-08 F
4,40E-11 F
23993,51044 Hz
-
f → 500 Hz
1,00E-08 F
1,00E-10 F
15915,49431 Hz
-
f → 500 Hz
1,00E-08 F
1,00E-09 F
5032,92121 Hz
-
f → 500 Hz
47
Schering bridge
Figure 4.14: Schering bridge layout.
A frequency independent Schering bridge was also studied and tested. The Schering bridge is built with the same basic balance principle of impedance balancing as
the Wien bridge. However balance is achieved by comparing an unknown capacitor
to a capacitor of known value, with scaling determined by the values of the resistive
network, see 4.14. The Schering bridge is balanced by a single trim potentiometer
until the impedance in the two arms are equal [27].
In the Schering Bridge, the resistance values of resistors R1 and R2 are known,
while the resistance value of resistor R3 is unknown. The capacitance values of C1
and C2 are also known, while the capacitance of C3 is the value being measured. To
measure R3 and C3 , the values of C2 and R2 are fixed, while the values of R1 and C1
are adjusted until the current between points A and B becomes zero. This happens
48
when the voltages at points A and B are equal. When the bridge is balanced,
Z1 /C2 = R2 /Z3
(4.17)
, where Z1 is the impedance of R1 in parallel with C1 and Z3 is the impedance of R3
in series with C3 . The capacitive reactance of a capacitor C is 1/2πfC. Utilised this
in equation 4.17,
Z1 = R1 /[2πf C1 ((1/2πf C1 ) + R1 )] = R1 /(1 + 2πf C1 R1 )
(4.18)
Z3 = 1/2πf C3 + R3 .
(4.19)
while
Thus, when the bridge is balanced,
2/(1 + 2πf C1 R1 ) = R2 /(1/2πf C3 + R3 );
(4.20)
2πf C2 (1/2πf C3 + R3 ) = (R2 /R1 )(1 + 2πf C1 R1 );
(4.21)
C2 /C3 + 2πf C2 R3 = R2 /R1 + 2πf C1 R2 .
(4.22)
or
or
When the bridge is balanced, the negative and positive reactive components are equal
and cancel out,
2πf C2 R3 = 2πf C1 R2
(4.23)
R3 = C1 R2 /C2
(4.24)
or
. Similarly, when the bridge is balanced, the purely resistive components are equal,
so
C2 /C3 = R2 /R1
49
(4.25)
Figure 4.15: Schering bridge results, C2 = 100pF .
or
C3 = R1 C2 /R2
(4.26)
Simulations of the Schering Bridge showed promising results where the circuit
could be balanced for low frequencies. As the parametric sweep only is done over
R2 , frequency increase will cause the bridge to drift from its balance condition, i.e.
when the reactance components cancel. This causes phase delay and equation 4.26
is no longer applicable. In order to increase the range of the measurements two
different values for C2 were studied; 100 pF in order to measure the capacitances in
the range of a pF and a 10 nF in order to measure the capacitances in the order of µF.
The simulations were carried out by parametric sweeps of the resistance R2 and the
output signal was taken as the difference of the two branch voltages. The bridge was
constructed on a breadboard and tested for a range of test capacitors. The results
can be seen in figure 4.15 and figure 4.16.
The bridge did not work according to theory during breadboard testing. Noise
50
Figure 4.16: Schering bridge results, C2 = 9.67nF .
pickup in the experimental setup was shielded using aluminium foil and ground loops
were avoided. The conclusion of the breadboard model was that a large stray capacitance inside the breadboard was creating a non-balance and limitation on the Schering
bridge capacitance resolution. A Wagner grounding approach was tested, where the
point of measurement is switched between a capacitor and trim pot connection to
ground and the circuit main ground. The Wagner earth balancing approach did not
improve the measurements. The reactive components where tried to be balanced
out by utilizing variable trimming capacitors in additions to the circuit capacitors,
however this approach did not improve the measurements as well. To circumvent the
issue of the stray capacitance the model was soldered on a perf-board. The perfboard model was mounted into a metallic box with the casing connected as ground
as seen in figure 4.18. The model was tested for a range of capacitors from 3 pF-1
nF. The results seen in Figure 4.17 still showed signs of a stray capacitance, albeit
smaller than in the breadboard model. The results did not comply with the Schering
51
Figure 4.17: Schering bridge results, Perfboard model.
Figure 4.18: Schering bridge test circuit. Coarse and fine adjustment of variable
resistors is seen on the front face of the box.
52
bridge theoretical calculations. However it should be noted that the measurements
were aimed at capacitance in the pF range, where noise and stray capacitance is a
major measurement issue. The bridge was sensitive enough to be used for differential
measurements, as it could sense capacitance differences of a few pF.
The Schering bridge was constructed and calibrated with a look-up table with
resistance values corresponding to test capacitors of known values. In this way the
non-theoretical Schering bridge could be utilized for capacitance measurements. A
step towards adapting the experiment to the EXCEED detector was to test it on a
physical capacitor of parallel plates with a dielectric medium between the two capacitor walls. The capacitor was constructed using two overlapping metal plates
separated by a sheet of paper of known thickness and dielectric constant. The area
of the plates were measured and used to calculate the capacitance through equation
4.5. The results can be seen in figure 4.19. The results from the parallel plate capacitance measurements showed uncertainties in the accuracy of the Schering bridge
and the results were considered faulty. The Schering bridge was hence considered too
unreliable and another approach to measuring the detector capacitance was chosen.
53
Figure 4.19: Parallel plate capacitor results, Schering bridge and AVR microcontroller.
4.2.2
Digital test circuit
ATmega48 RC timer circuit
The capacitance measurement is done as a measurement of RC transient with a
JYETECH designed circuit see A. Voltage build-up in the RC circuit is expressed as
V (t) = V0 e−t/RC
(4.27)
when V(t) reaches the threshold voltage V = Vt equation 4.27 is derived to isolate
charging time,
t = −RC ∗ (1 − Vt /V0 )
(4.28)
The circuit utilises the ATmegas analogue comparator, with a lower and upper triggering limit. The limits are determined by a voltage divider that is connected to
the comparator pins PD6 (AIN0) and PD7 (AIN1). The AIN1 gives the lower limit
and as its threshold level is reached it starts the microcontroller internal timer circuit which is governed by the 12 MHz crystal connected across the PB6(XTAL1) and
54
Figure 4.20: Digital RC timer circuit.
PB7(XTAL2) pins (the microcontroller is run in external clock mode). The number of
clock cycles is measured from lower threshold until upper threshold voltage is reached
and the voltage threshold levels are stored. The charge up time is used to calculate C
from equation 4.28 and sent as to a 10-bit ADC which is connected to a LED 4-digit
display for direct readouts and a serial output for connections to a terminal.
The combination of 12 MHz oscillation frequency, chosen resistances and 10-bit
ADC functionality gives a capacitance range of 0.1 pF - 500 µF . The firmware initiate
the microcontroller by setting a RC bias point, in order to remove the effect of stray
capacitances and power supply smoothing capacitors.
55
Measurements of test capacitors were conducted for a range of values between 3
pF - 47 µF and showed capacitance values within 2% of the expected values. The circuit was fitted with extension cords with spring clamps and measurements of parallel
plate capacitance was conducted. The results can be seen in figure 4.19. The results
were in the range of 95-150% of the expected capacitance values. The slight deviation
from expexted values was deemed a measurement error. Together with Dr. Kazuo
Yoshioka, EXCEED QM capacitance measurements were carried out. The Measurements took place in a cleanroom at ISAS/JAXA in Sagamihara. Dr. Yoshioka had
previously calculated theoretical values for detector stray capacitance and the measurements were aimed to verify his findings. The circuit was connected to all possible
combinations of the detector outputs. SMAA-SMAD values are the measurements
done to the four RAE vertices output SMA connectors, Zin/Zout the top/bottom
face of the Z-stack MCP input voltage connector and Vin/Vout the top/bottom face
of the V-stack MCP input voltage connectors. The values were found in the range
of 150pF between the signal outputs and ground and in the region of 35-65pF between the MCP HV inputs. These results confirm the previous calculations done
by Dr. Yoshioka. The cross RAE intrinsic capacitance (SMAx-SMAy) was not able
to be measured, most probably due to the large cross RAE resistance upsetting the
RC relationship of the comparator input. When the oscillation from the crystal is
injected into an output channel of the RAE the pulse will diffuse through the surface
and arrive at the channel where the measurement is being taken according to the
differential equation that is governing thermal diffusion in materials. Along the lower
resistance border the charge will travel much faster than across the high resistance
surface. The resulting readout pulse will hence be a mixture of multiple diffusing
waves, creating a mixture of frequencies. The readout from the microcontroller timer
will hence vary and not give any accurate capacitance reading.
56
Table 4.2: EXCEED QM stray capacitance (pF)
Ground
4.2.3
SMAA
SMAB
SMAC
SMAD
Zin
Zout
SMAA
154
SMAB
153
SMAC
153
SMAD
149
Zout
40,9
36,2
36,2
36
36
Zin
42,6
36,5
36,5
36,7
36,6
Vout
64
48,5
49
49,4
49,1
314
167
Vin
63,2
48,8
49,5
49
49,2
136
77
147
Discussion
Due to noise in the EXCEED HV supply at 212.5 kHz a fear of charge build-up in
the detector had to be investigated. The charge could be stored in stray capacitances
inside the detector consisting of metallic parts with a small physical separation. Three
measurement methods were studied, calculated, simulated and tested. Given the
small expected values of stray capacitance the method needed to resolve capacitance
in the order of pF. The Wien parallel bridge was shown to function both in theory
and in OrCad PSpice simulations. However it did not function on a breadboard.
The reason for this is believed to be interference from the stray capacitance in the
breadboard itself as well as inaccuracies in component values that makes the frequency
dependent and noise sensitive circuit impossible to balance. The circuit and method
is hence not recommended for capacitance measurements below ≈ 1 nF. The Schering
bridge studied was also shown impossible to balance fully. Utilising higher quality
trimming capacitors might improve the functionality when balancing the phase shift.
The lookup-table method was shown to function to a semi-satisfactory degree, it is
57
hence recommended as a measurement method for larger capacitors. The Schering
bridge was utilised in a RAE intrinsic capacitance measurement for the TEX RAE
and the EXCEED RAE and their capacitance was shown to be in the range of 500
pF and 1 nF respectively. These results were deemed too high and are believed to be
due to the effect of the RAE sheet resistivity. Its effect on the measurement has not
been investigated.
The digital RC timing circuit was soldered and tested on parallel plate capacitances, test capacitors and the EXCEED detector. It was shown to work with high
precision and can hence be recommended for use with any future detector. The values
that were measured verified the calculated capacitance values and were presented to
Hamamatsu Photonics during a meeting in July and were deemed to be accurate for
the detector. The values are in a range where the stray capacitance is not interfering
with the readout results.
58
4.3
Distortion measurement and effective area determination
RAE can be of different shapes and sizes as described in chapter 5. In order to
determine the effect of RAE shape on its performance a experiment was conducted.
The hope was to determine the effective area of the anode, i.e. the size of area in
which the image resolution was acceptable, position response linear and no distortion
effect would occur. Distortion in RAE is either related to positive radial distortion
(pincushion distortion) or negative radial distortion (Barrel distortion) see figure 4.21.
Figure 4.21: Example of barrel and pincushion distortion. h is the undistorted vertices
distance, h’ the distorted vertices distance.
Distortion is expressed in terms of radius from the image/distortion center according
to equation 4.29.
h = h0 + k1 h03
(4.29)
where h is the undistorted vertices distance, h’ the distorted vertices distance.
The distortion can take on more complex forms and will then be expressed as,
h = h0 + k1 h03 + k2 h05 + k3 h07 ...
59
(4.30)
The reason for radially distorted output images in RAE is not well known. The
main reasons are believed to be the RAE output electrodes placement, seeing that
they create local areas of lower potential, thus creating a non-uniform E-field through
the anode. In square anodes, placing the electrodes at the vertices will create pincushion distortion and at the center of the sides of the anode will result in barrel
distortion.
The test comprised of a rectangular resistive anode of Gear’s design that is similar
in size and shape to the one utilised in PHEBUS. A 5-stage movable MCP was
mounted in front of the RAE. The MCP was mounted on a PEEK plate with four
sets of pre-drilled holes so that the MCP could be moved in regards to the RAE. The
schematic can be seen in appendix B.
The setup was put in a vacuum chamber that was evacuated to high vacuum
during a weekend. Connected to the vacuum chamber were a vacuum-gage and a
monochrometer connected to a deuterium arc lamp. At the connection between the
lamp and the monochrometer was installed a slit in order to further limit the intensity.
The MCP and RAE was mounted on a four-axis gimbal (x,y,z,θ). Cross RAE
resistances were measured and the HV was turned on and decreased with -100 V/min
until reaching -2.6 kV, where dark counts where made. The decrease in voltage
continued until it reached operational MCP voltage, -2.9 kV. No grating was at this
time available in the laboratory, thus a grid pattern was mimicked by moving the
gimbal with 5 mm at a time in first along the x-axis while keeping the z-value constant.
This was repeated until a full grid had been measured. After collecting the data the
chamber was taken back to atmospheric pressure. The MCP was moved with respect
to the RAE and then put back into the chamber. The chamber was then again
evacuated during a minimum of 48 hours. This procedure was repeated three times.
The results can be seen in figure 4.22, where all three measurements have been
spliced into one readout. The resulting image shows some tendencies to image dis60
Figure 4.22: Results utilising movable MCP in front of RAE.
R
tortion. The data was entered into Matlab
where each grid-point distance to the
image center was calculated and stored in a vector. A grid-pattern with undistorted
points was generated and the distance from the undistorted grid-points to the image
R
center was calculated and stored in a vector. Utilising the Matlab
lsqcurvefit for
curve fitting, the distorted data points distances could be fitted to 4.29. The resulting
radial distortion coefficients are shown below.
k1 = -0.0058
k2 = 2.3916
C = -129.2964
61
Discussion
The results of the distortion measurements are deemed to be inaccurate seeing that
there are so many unknowns affecting the measurements. First and foremost the
MCP is not as efficient close to its rim where some of the measurements are made,
the gimbal position might have had a small θ value causing a slanted area for the
EUV light to impinge upon that can produce a effect similar to distortion. The MCP
and RAE position was not centered with a measurement at the central 512x512 pixel.
This creates a very troublesome distortion problem seeing that the measurement
point positions are changed both due to distortion and initial unknown distance to
the distortion center. In order to verify and visualise that there was a image distortion
a visual distortion correction of the data was made using Adobe Photoshop CS6 and
DXO Optics Pro 8, see figure 4.24. Tests where the output was entered into a camera
calibration software, IMATEST
TM
, gave no information for the case with the movable
MCP. However the results from the charge leakage vacuum chamber test were entered
into the software and a distortion profile of the square TEX anode could be made. The
output is shown in picture 4.23. IMATEST
TM
can be utilised to measure distortion
camera lenses by photographing printed dot-patterns at a given distance with an
aperture of known focal length f. The results of the distortion tests show that the
rectangular RAE suffers from image distortion. The tests show that if a grid-mask is
placed precisely in front of the center of the movable MCP, so that a correct center
to vertices vector can be calculated, the distortion should be able to be determined
by Matlab and IMATEST. The gimbal should also be fixed in a known position so
that no error due to gimbal movement can upset the results. The tests seems to show
that the rectangular RAE is prone to more radial distortion. This should be further
investigated in order to optimise the detector design.
62
Figure 4.23: IMATEST results showing signs of distortion in the square TEX RAE.
63
Figure 4.24: DXO Optics Pro 8 results, shows signs of barrel distortion and gimbal
θ 6= 0.
64
Chapter 5
RAE PARAMETER OPTIMISATION
A literature study of the theory behind what governs RAE resolution and noise performance was carried out. The subject has been studied extensively, mostly during
the 1960s to the early 1980s. In general, laboratory results within the field has shown
difficult to trace back to theory as there are very many ingoing parameters that affect
RAE performance. This chapter will describe the theory of charge division, amplitude
ratio read-out and some resolution limitations that arise in square anodes and anodes
of circular arc terminated design. A calculation of the mean-square resolution of a
Gear anode is done, based on articles by G. W. Fraser [35] [36] [37] [38].
5.1
1-D Capacitively Terminated RC-line
In order to explain the RAE diffusion process and read-out technique the 1-D case
of a RAE is studied. The anode is modelled as a one dimensional RC line with
terminating capacitors and one connection used to measure the total charge from the
anode.
RAE readout methods are based in the combination of two fundamental equations;
Continuity equation (5.1)
∂φ
+∇·j =0
∂t
65
(5.1)
Figure 5.1: Equivalent circuit of 1-D Capacitively Terminated RC-line. Charge injected as a step into x=X, modelled as a current source discharging a capacitor. Image
adapted from Kalbitzer et al. [2].
66
Fick’s Law
j = −D(φ)∇φ(r, t)
(5.2)
(5.1) and (5.2) are combined to create the two dimensional diffusion equation,
∂φ
= ∇ · (D(φ)∇φ(r, t))
∂t
(5.3)
Applying equation 5.3 to the charge input response of the 1-D RC line is described
by the differential equation,
∂U
L2 ∂ 2 U
={
}(
)
∂t
RC ∂X 2
Where
U = Voltage;
t = Time;
R = Resistance of the back layer;
C = Capacitance of the detector junction;
L = Length of the detector;
X = Position coordinate on the line.
Applying Dirichlet boundary conditions:
U = 0, for all t at X = 0 and X = L.
With initial conditions:
U = ∞ at X = x and U = 0 a X 6= x with x 6= 0, L and for t = 0.
67
(5.4)
Equation (5.4) is also derived from the telegraphic equation for the case of vanishing inductivity, which in turn is the wave equation for diffusion processes, with
”diffusion constant” of
L2
.
RC
The solutions of the diffusion equation are given by the Fourier series expansion,
∞
2Q0 X
nπ
nπ
−n2 π 2 t
U (x, t) =
sin{( )X} × sin{( )x} exp{
}
C n=1
L
L
RC
(5.5)
Q0 is the total charge deposited into the RC line during a ∂t, significantly shorter
than the subsequent readout time constants given by,
Z
Q0 = i0 dt
(5.6)
Current can be expressed as,
L ∂U
i=( )
R ∂X
(5.7)
Equation (5.4) and (5.7) combines to the readout current at position X=0, X=L,
X=E arranged according to figure 5.1 ;
∞
2πQ0 X
nπ
−n2 π 2 t
i0 (x, t) = {
}
n sin{( )x} × exp{
}
(RC) n=1
L
(RC)
(5.8)
∞
nπ
−n2 π 2 t
−2πQ0 X
iL (x, t) = {
}
n sin{( )x} × cos(nπ) exp{
}
(RC) n=1
L
(RC)
(5.9)
∞
−2πQ0 X
nπ
−n2 π 2 t
iE (x, t) = {
}
n sin{( )x} × {1 − cos(nπ)} exp{
}
(RC) n=1
L
(RC)
(5.10)
68
As seen from equations 5.8-5.10 the readout current is not linearly dependant on
position.
Investigation of the collected charge gives after integration, according to 5.1,
∞
2Q0 X −1
nπ
−n2 π 2 t
Q0 (x, t) =
n sin{( )x} × 1 − exp{
}
π n=1
L
(RC)
∞
−2Q0 X −1
nπ
−n2 π 2 t
QL (x, t) =
n sin{( )x} × cos(nπ) 1 − exp{
}
π n=1
L
(RC)
(5.11)
(5.12)
∞
−2Q0 X −1
nπ
−n2 π 2 t
QE (x, t) =
n sin{( )x} × {1 − cos(nπ)} × 1 − exp{
} (5.13)
π n=1
L
(RC)
Integration t → ∞ gives the total charge collected,
Q ∗0 (x, t) =
∞
nπ
2Q0 X −1
x
n sin{( )x} = 1 − ( )Q0
π n=1
L
L
∞
−2Q0 X −1
nπ
x
Q ∗L (x, t) =
n sin{( )x} × cos(nπ) = ( )Q0
π n=1
L
L
69
(5.14)
(5.15)
∞
nπ
−2Q0 X −1
n sin{( )x} × {1 − cos(nπ)} = −Q0
Q ∗E (x, t) =
π n=1
L
(5.16)
From equations (5.14-5.16) it follows that an RC line can be seen as an linear,
position dependant charge divider. The charge collected at the energy source QE is
position independent.
5.2
2-D Sheet Resistivity
The same theory holds for the two dimensional case of the RAE. The RAE can be
viewed as an planar resistive sheet. If R denotes the surface resistivity, the electrostatic capacitance is denoted C, V(x,y) the potential and the vector current density
denoted S. By combining Ohm’s law and the continuity equation,
RS + ∇V = 0
(5.17)
∇ · S + C V̇ = J
(5.18)
Where J is the charge applied to the RAE surface. J can be modelled by a delta
function,
J(x, y, t) = Qδ(t)δ(x − x0 )δ(y − y0 )
(5.19)
Q is the total charge delivered to the anode and x0 , y0 are the input coordinates.
70
the result is shown to be the two dimensional time dependent diffusion equation,
∇2 V − RC V̇ = −RJ
(5.20)
As seen from equation (5.20) designing a RAE with total capacitance close to zero
results in,
∇2 V = −RJ
(5.21)
Evaluation of the DC-limit enable calculation of the electrode currents. I.e c = 0
or the current injection is considered in a steady state condition. Equation (5.21) is
then simplified to,
∇2 V = 0
(5.22)
which has known solutions for Neumann and Dirichlet boundary conditions.
When the RAE is connected to a low impedance pre-amplifier it can be considered
grounded (virtual ground) at its boundary. Uniform Dirichlet conditions now apply
to the diffusion equation which has previously been shown for the 1-D case. The important result is that a small anode capacitance to ground (negligible in comparison
with the pulse shaping amplifier capacitance) or pulse shaping amplifier time constant
Ta rc
π2
fulfil the DC-limit conditions where unwanted time dependant, non-linear
pulse responses due to anode charging disappears. See equations (5.11 - 5.13)
71
While operated in the DC-limit the Maxwell reciprocal theorem is applicable to
the four output terminals. If a current i0 enter the RAE at position (x,y), the terminal
currents are given by 4.2, 4.2,
It is clear that (ideally) i0 = i1 + i2 + i3 + i4 , which allows for amplitude ratio
position determination.
5.3
1-D Capacitively Terminated RC-line Resolution
To continue and look into the resolution of the 1-D system it is vital to understand
that the pulse rise time at the readout electrodes are given by RC product, that is
given by the anode properties itself. The RC product increase as distance increase
from electron incidence position and MCP to RAE distance increase. This will give
the actual anode RC product a range of values in which to vary. In order to create
detector with high resolution the pulse shape amplifier time constant must be matched
to this value. This puts limitations on line length (for a set value of R)/pulse shaping
amplifier rise time, seeing that the distance governs the anode rise time.
Resolution of a resistive anode is coupled to thermal noise both intrinsic in the
anode material but also in the feedback resistor of the pre-amplifier and pulse shape
amplifier. Great care has to be made to minimise the resistance between the anode
and the charge amplifier. If for instance the output of the pulse amplifier is connected
to an RC-integrator in order to create a bipolar pulse for the electronics further down
the line, concerns of which order of integration/differentiation added must be taken,
seeing that every order is an additional capacitance that needs to be charged.
A series of articles written by G. W. Fraser et al.[1], [36] and [37] was studied that
gives a quantitative description of the non-linearity and resolution parameters. The
main conclusions applicable from these articles in a somewhat simplified, condensed
form is given below.
72
The first case studied is a 1-D capacitively terminated RC line as depicted in
figure 5.1, utilising the amplitude ratio readout method described in equations 4.2,
4.3. Assumed filter configuration is a CR-CR-CR filter. Parameters utilised in the
calculation are,
Normalised time constant
Ta π 2
T =
RC
(5.23)
Where, Ta is the shaping amplifier time constant, R is the total line resistance and C
is the total capacitance to ground.
Terminal to line capacitance ratio
Cd
C
(5.24)
The performance is dependent on a set of properties optimised for the above stated
parameters. The positional sensitivity is S(x). It expresses the position dependant
fluctuation in terminal amplitude ratio Q(x) for the two output terminals in the
RC-line. For Q(x) see four terminal equivalent equations 4.2, 4.3.
Positional sensitivity
S(x) =
dQ(x)
dx
(5.25)
RMS non-linearity
N
100 1 X 0
δx =
(
[Q (xi ) − (xi − 0.5)(2Sm )]2 )1/2
2Sm N i=1
(5.26)
The dimensionless resolution parameter is the proportionality constant between
the RMS positional resolution ∆x and the signal to noise ratio qn /q0 . r12 is the noise
correlation coefficient, a is peak amplitude of shaping filter step response, see article
[1].
73
Dimensionless resolution parameter
2
+ Vx2 )1/2
a (V1−x
2r12 V1−x Vx 1/2
×
(1
−
)
D(x, T, Cd/C) =
S(x) (V1−x + Vx )2
(V1−x + Vx )2
(5.27)
The line-noise parameter determine qn for a given operating temperature (Te ) and
capacitance to ground (C).
Dimensionless line-noise parameter
Z 1Z ∞
Cd /C
µ(T, Cd /C) =
{|H(jω)|2 |P (x, ω)|2 dωdx}1/2
2π
a
0
0
(5.28)
where,
P (x, ω) =
coshγ(1 − x) + Zd sinh(γ(1 − x))
2coshγ + (Zd + Z1d )sinh(γ)
(5.29)
where Zd = (1/γ)(C/Cd ) and γ = π(jω)1/2 .
The RMS positonal resolution is hence given as, RMS positonal resolution
∆x = (kTe C)1/2 µD/q0
(5.30)
The resolution of the 1-D line can hence be expressed as a function of Te and C
through the parameters µ and D. The addition of preamplifier noise qa is neglected as
the its noise level (A225 noise level; 280 electrons RMS) is considered lower than
the intrinsic line noise.
Optimisation is done by calculating minimum levels of input parameters and thus
returning the minimum corresponding RMS resolution. For a 1-D capacitively terminated RC-line the optimum resolution product is,
µD(T, Cd /C) = 0.895
(5.31)
at T = 1.2 (Cd /C = 0). This results in a RMS positional resolution,
(∆Xm )min = 0.569C 1/2 q0−1 µm(cm of line length)−1
74
(5.32)
5.4
2-D Square Anode Resolution
When the 1-D case extend into two dimensions it adds another dimension to the
diffusion problem stated earlier. A similar resolution dependency on µD(T, Cd /C)
applies in the 2-D case, but the optimized values are changed due to that the geometry
of the anode itself starts to play a part in the resolution of the system. The choice of
anode geometry also plays a significant part of the possible resolution.
The square anode is severely affected by distortion, see figure 4.21. This is due
to the E-field through the resistive layer is not linear. The output electrodes are
connected to charge sensitive preamplifiers that act as virtual ground. This causes
local sinks in the electrical field. Thus the incoming electrons will not diffuse directly
proportional to the incoming position as in the 1-D case. If the electrodes are places at
the anode sides the recovered positions will be affected by barrel distortion (negative
radial) as the electrons have been accelerated towards the sides. When the electrodes
are placed at the vertices of the anode the opposite, pincushion distortion (positive
radial) will affect the results. This causes only the central area to be linear in its
response. The effective area is hence lowered while the additional unused area adds
to MCP to RAE parallel plate capacitance.
The fraction of anode side length to electrode etching length is denoted F, electrode
fraction. The length of the electrode will govern the amount of distortion seen in the
readout. Two different cases is studied in G. W. Fraser and E. Mathieson’s report;
The case when the electrode are placed at the sides of the anode and the case where
the electrode is placed in the vertices. The case of vertices placed electrode is found
to be less prone to distortion and also better from a positional resolution perspective.
The choice of readout coordinate axis arrangement also affect the resulting resolution
and distortion. The two cases studied are coordinate axis parallel to the anode sides
and axis along the anode diagonal.
75
In order to optimise the square anode a set of properties need to be minimised as
in the case of the 1-D RC-line, but this time for a more general type of (RC)M (CR)N
filter for the same parameters utilised in the 1-D case, equation 5.3 and equation 5.23.
The mean sensitivity is the constant that describe the deviation of recovered position
from the amplitude ratio calculation.
Mean sensitivity in the case vertice placed electrodes and coordinates parallel to
the anode sides
Sm xs = (i1 + i4 )/(i1 + i2 + i3 + i4 )
(5.33)
Sm ys = (i1 + i2 )/(i1 + i2 + i3 + i4 )
(5.34)
The distortion parameter is the root mean square of the recovered displacement
of a test grid of input charge. It is expressed as percentage of the anode side length.
Distortion parameter
δ2 = 100(
N
N
1 XX
{[x(i, j) − xs (i, j)]2 + [y(i, j) − ys (i, j)]2 })1/2
N2 i j
(5.35)
The RMS positonal uncertainty is as in the 1-D case given by,
RMS position uncertainty
δx = D(x, y)qn /q0
(5.36)
δy = D(y, x)qn /q0
(5.37)
where D is the dimensionless resolution parameter as seen in the 1-D case but
here adapted to the 2-D case.
76
Dimensionless resolution parameter in the case vertice placed electrodes and coordinates parallel to the anode sides
√
2a (V3 + V2 )2 + (V1 + V 4)2
2(rrad + rop (V3 + V2 )(V1 + V 4)
×[1+rad −
]}
D(x, y) =
{
4
S(x, y) (V1 + V2 + V3 + V4 )
(V3 + V2 )2 + (V1 + V 4)2
(5.38)
where r12 is the noise correlation coefficient at the ends of a RC-line, the rad at
adjacent vertices, rop at opposite vertices.
The noise in each channel is expressed as qn which incorporate the thermal noise
in the resistive sheet and the preamplifier noise.
Channel noise
qn = γ(
2kTe Ta 1/2
)
π R1
(5.39)
where R1 is the single terminal resistance, Te is the absolute temperature, k
is Boltzmann’s contant and γ is a dimensionless filter constant. For a matched
(RC)M (CR)N filter,
Dimensionless filter constant
1
γ(N, M ) = {
a
Z
0
∞
x2N −2
dx}1/2
(1 + x2 )N +M
(5.40)
where a is peak filter response amplitude. γ(1, 1) = 2.41 and γ(2, 1) = 1.92.
Combining equation 5.39, 5.38, 5.36, 5.37, with the correct choice of input parameters Te , Ta , q0 and R gives the resulting resolution limit of the 2-D RAE see
table 5.1. All usable areas are deemed to be in the region of 70%. The vertice placed
electrode with coordinates parallel to the RAE sides is the best option. It gives in
a resolution optimised case, δ2 = 3.7% pin-cushion distortion. The system would be
be characterized by R1 /R = 0.953. Utilising a sheet resistivity of 250 kΩ it would
result in a 1560 electrons RMS in noise charge. The positional resolution would for
Ta = 1µS, Te = 300 K and C 40 pF be, (∆x)m = 3∗10−4 . The corresponding mean
RMS resolution would hence be ≈ 15µm, showing that the resolution limitation of
77
Table 5.1: Results of optimisation, Square anodes.
V/P - Vertice/Parallel, V/D - Vertice/Diagonal, S/P - Side/Parallel, S/D - Side/Diagonal
V/P
V/D
S/P
S/D
Electrode fraction F
0.6
0.4
0.2
0.5
Optimum resolution product µ D
1.2
1.6
1.8
1.4
the detector would be dependant on the MCP (capillary diameter 12µm) or frontend
electronics noise charge, not the thermal noise generated in the square RAE.
5.5
Circular Arc Terminated Anode (Gear’s Anode)
The limiting factors for the 1-D Capacitively terminated RC-line and the square
resistive anode has been shown to be distortion, noise and geometric limitations
within the anode itself. The resulting output performance has shown to be closely
dependent on the readout electronic design. The choice of preamplifier, pulse shape
amplifier and filter as well as distance between RAE and MCP greatly effect the RAE
results.
C.W. Gear have designed a resistive anode ideally linear in its response [40]. It has
a square shape that is bounded by circular arcs between the anode vertices. Along
the border of the anode a low resistance line resistivity is etched.It is based in the
boundary value theorem presented by Gear; that a steady state current flow in a
uniform resistive sheet R is not affected by a circular hole of radius a as long as a
border resistance is deposited along the border of the hole that satisfy,
RL ≈
R
a
(5.41)
so that the differential potential drop laying between θ and θ + δθ along the curvature is matched with the intercept current in the border resistor.
78
The assumption is valid for w d but should rather be exchanged to the more
general expression,
β
R
2−β
(5.42)
w
a(2 − wa )
(5.43)
RL =
where,
β=
w denotes the border resistance width, a the curvature radius and d the sheet diameter.
The name Circular Arc terminated anode is used interchangeably to Gear anode
throughout this report. Studies indicate that the Gear anode does not suffer from
the image distortion seen in square anodes. The output distortion due to geometry
seen in square anodes depend on a number of factors. The main driving factor for
image distortion is the choice of terminal layout as seen in 5.4. The RAE electrode
terminals can either be situated on the vertices of the RAE or in the middle of the
RAE sides. The two types of distortion that square anodes are affected by are called
pincushion distortion or Barrel distortion.
The Gear anode is not affected by the above named distortion. This is however
done at the cost of usable image area. The Gear anode is linear in its central area
but towards the edges loses its linearity. As a guideline the Gear anode usable area
is in the scale of 70% of D.
The Gear anode also suffers from a higher level of thermal noise since it has a resistive
border termination. The sheet resistance value of the RAE is a major design factor
and affect many aspects of the system. The main factor it affects is the rise time of
79
the anode charge response, τ . R should be chosen so that,
τ=
Rc
π2
(5.44)
is much smaller than the τ for the output amplifier.
A low value of R will increase the systems overall sensitivity to pick up noise from
the high voltage supply and voltage divider circuits but in turn it will have a charge
dissipation throughout the material will be quick and the relaxation time of the anode
will shorten. A small R is in this case considered in the region of 1 k Ω-10 kΩ.
A high value of R will increase the stability of the system but make the step
response slow. The position resolution is increased with higher resistivity as long the
shaping amplifier is chosen to match the resistivity and the detection event rate, the
pulse shaping amplifier must be able to integrate the entire pulse during its peaking
time (A225 - 2.4 µS) other wise the result will be position accuracy degradation. A
high R is in the region of 100 kΩ-1 MΩ.
A study of the DC-limit resolution according to the findings of G. W. Fraser and
E. Mathieson [35] was carried out. In order to describe the Gear anode an angle θ
from the circular terminators center point is defined, see figure ??.
The total anode area is given by,
AG = d2 (1 −
2θ − sin2θ
= d2 g(θ)
2sin2 θ
(5.45)
where d is anode side length.
The inscribed area of the anode (the rectangular area made up by the vertices) is
given by,
Aw = d2 (1 −
1 − cosθ 2
)
sinθ
(5.46)
The total strip area is given by,
As = d2
4θ w
( )
sinθ d
80
(5.47)
The total usable anode is therefore,
A (θ) =
Aw
AG + As
(5.48)
The mean square fluctuation in x is given by,
(∆x)2 =
2 2
qnb
d
2
q0
(5.49)
The term q0 is the injected charge, qnb is the noise charge across the anode given
by,
2
qnb
=(
2kTe 2 Ta
γ
)
π
R2
(5.50)
where R2 the cross anode resistance is given by,
R2 =
R
(1 + cotθ)
(5.51)
ηRc
π2
(5.52)
Ta is chosen such that,
Ta =
where η is a constant in the order of 10, chosen to get linear readouts.
The expression for mean square fluctuation in x can hence be expanded to,
(∆x)2 =
1 2kTe 2 ηc 2 2
(
)γ 2 Aw f (θ, w/d)
q02 π
π
(5.53)
where
f 2 (θ, w/d) =
1 + cot(θ)
(1 + As /AG )g(θ)2A (θ)
(5.54)
Utilising FreeMat and Matlab a simulation based on equation 5.53, 5.54 of the
TEX RAE was made. The results are shown below.
81
————–Results—————
************************************
For a RAE of Gears design with:
** RAE width: 0.0500
** Circular arc radius: 0.0800
** Circular arc angle: 18.2100
** Boundary resistance width: 0.0010
** RAE Sheet resistance per square: 40000.0000
** Boundary resistance: 503.1248
** Anode temperature: 300.0000
** Eta: 10.0000
** Gamma: 2.4100
********************************
Mean square fluctuation in x: 1.867353E-012,
Root mean square fluctuation in x: 1.320418E-012
The simulation shows that the RAE is showing negligible fluctuation in position.
82
5.6
Discussion
A literature study has been done in order to help with the design work of future
detectors. Optimised design parameters for the 1-D capacitively terminated RC-line
and square anode have been presented.
For the Gear anode design recommendations have been presented. The theory has
been applied through software simulation and shown promising results for the TEX
RAE. A recommendation is to continue the work by applying it to the PHEBUS and
EXCEEED detectors.
Conclusively, the design process of a RAE based detector of Gear’s design should
be done in the following steps. First the expected detection count rate should be
matched to the pulse shaping amplifier time constant. The sheet resistivity shall be
maximised for best resolution, while still fulfilling Ta η Rc
. The capacitance c can
π2
be approximated with a parallel-plate approximation of the MCP - RAE gap and
plate areas. To get the best resolution possible a method for measuring the intrinsic
capacitance within the RAE should be constructed so that it can be included into
the time constant design condition [47].
83
REFERENCES
[1] G.W. Fraser, E. Mathieson, K.D. Evans, The capacitively terminated RC line,
Nuclear Instruments and Methods, 180, 1981, 255-279.
[2] S. Kalbitzer, W. Melzer, On the charge dividing mechanism in position sensitive detectors, Nuclear Instruments and Methods 56, 1967, 301-304.
[3] A. Doehring, S. Kalbitzer, W. Melzer, Semiconductor spectrometers for energy
and position spectroscopy, Nuclear Instruments and Methods 59, 1968, 40-44.
[4] S. C. Solomon, Mercury: the enigmatic innermost planet, Earth and Planetary
Science Letters 216, Issue 4, 2003, 441-455.
[5] R. Grard, A. Balogh, Returns to Mercury: science and mission objectives,
Planetary and Space Science, 49, Issues 14–15, 2001, 1395-1407.
[6] F. Sohl et al., Implications from Galileo Observations on the Interior Structure
and Chemistry of the Galilean Satellites, Icarus , 157, no. 1, 2002, 104-119
[7] A. G. W. Cameron et al. The strange density of Mercury: Theoretical considerations, Mercury, The University of Arizona Press 1989, pp. 692-708.
[8] N. F. Ness et al., Magnetic Field Observations near Mercury: Preliminary
Results from Mariner 10, Science, 185, 1974, 151-160.
[9] M. A. Slade, B. J. Butler, D. O. Muhleman. Mercury Radar Imaging: Evidence
for Polar Ice, Science, 258, 1992, 635-640.
[10] B. C. Murray et al., Mariner 10 pictures of Mercury: First results, Science,
184 , 1974, 459.
84
[11] A. L. Broadfoot et al., Ultraviolet Spectrometer Experiment for the Voyager
Mission, Space Sci. Rev., 21, 1977, 183.
[12] M. S. Wedlund In-flight calibration of the PHEBUS UV instrument Monte
Carlo modelling of the hydrogen exosphere, Ph.D. dissertation, Universite
Pierre et Marie Curie, Paris, France, May 2011
[13] D.
Attwood,
magnetic
treme
The
Spectrum,
Ultraviolet
Short
Course
Radiation
Wavelength
material
at
the
Region
for
Soft
University
of
the
X-Rays
of
Electroand
Berkeley,
Ex2009,
http://ast.coe.berkeley.edu/sxreuv/2005/Ch01.pdf.
[14] R. J. Vervack et al., Mercury’s Complex Exosphere: Results from MESSENGER’s Third Flyby, Science, 329, 2010, no 5992, 672-675.
[15] J. Casteren, M. Novara, BepiColombo Mission, Planetary and Space Science,
58, 2010, 2-20.
[16] E. Chassefie‘re et al., PHEBUS: A double ultraviolet spectrometer to observe
Mercury’s exosphere, Planetary and Space Science, 58, 2010, 201-223.
[17] European
Space
Science
Agency
(ESA),
Technology:
(2012-12),
BepiColombo,
ESA
Available:
http://sci.esa.int/science-e/www/area/index.cfm?fareaid=30,
[ac-
cessed: 2012-12-05].
[18] W. E. McClintock, M. R. Lankton, The Mercury Atmospheric and Surface
Composition Spectrometer for the MESSENGER Mission, Space Sci. Rev.,
131, Issue 1-4, 2007, 481-521.
[19] R. Killen, A. Potter, Review of ground based observations of Mercury’s
exosphere,
Presentation
85
held
at
Exosphere-Magnetosphere
Workshop LASP Boulder, Colorado, November 2–5, 2010, Available:
http://lasp.colorado.edu/messenger/MESSENGER_Workshop/files/..
Presentations/2_1_1_a_Killen_GBO_overview.pdf.
[20] R.E. Gold et al., The MESSENGER mission to Mercury: scientifc payload,
Planetary and Space Science, 49, 2001, 1467-1479 .
[21] C. L. Yen, Ballistic Mercury orbiter mission via Venus and Mercury gravity
assists, Paper AAS 85-346, AAS/AIAA Astrodynamics Specialist Conference,
Vail, Colorado, August 12-15, 1985.
[22] D. D. Barbosa, F. V. Coroniti, A. Eviatar, Coulumb thermal properties and stability of the Io plasma torus, The Astrophysical Journal, 274, 1983, 429-442.
[23] J. W. Belcher, The Jupiter-Io connection: An Alfvén engine in space, Science,
238(4824), 1987, 170-176.
[24] E. W. Goodman, A fine-structure chemistry model of the Io plasma torus,
Ph.D. dissertation, Aerospace Engineering, University Of Southern California,
Los Angeles, USA, 2006
[25] M. A. McGrath, R. E. Johnson, Magnetospheric plasma sputtering of Io’s
atmosphere, Icarus, 69, 1987, 519-531.
[26] J. Kister,
Introduction to physics of contact resistance,
Presenta-
tion held at SoutWest Test Workshop San Diego, 1998, Available:
http://www.swtest.org/swtw_library/1998proc/PDF/S01_kister.PDF.
[27] B.L Theraja, A. K. Theraja, ”AC Bridges,” in A textbook of electrical technology in SI units Vol II, AC & DC Machines, 23rd ed., S. Chand Publ., New
Dehli, India, 2012, ch.16, pp 628-640.
86
[28] G. Murakami, K. Yoshioka, I. Yoshikawa, High-resolution imaging detector
using five microchannel plates and a resistive anode encoder, Applied Optics,
49, No. 16, 2010, 2985-2993.
[29] K. Yoshioka, EUV spectroscopic observation of Jupiter’s inner magnetosphere,
Ph.D. dissertation, Dept. Earth and Planet. Sci., The University of Tokyo,
Tokyo, Japan, 2010.
[30] K. Yoshioka, G. Murakami, I. Yoshikawa, Optical performance of PHEBUS/EUV detector onboard BepiColombo, Advances in Space Research, 49,
2012, 1265-1270 .
[31] H. Ishii et al., An EUV spectrometer on earth-orbiting satellite for planetary
science, UV, X-Ray, and Gamma-Ray Space Instrumentation for Astronomy
XVII, Proc. of SPIE, 8145, 2011.
[32] K. Yoshioka et al., Development of the EUV detector for the BepiColombo
mission, Advances in Space Research, 41, 2008, 1392-1396
[33] K.Yoshioka et al., Feasibility study of EUV spectroscopic observation of the Io
plasma torus from the earth-orbiting satellite EXCEED, Planetary and Space
Science, 62, 2012, 104-110.
[34] Centre
12),
National
BepiColombo
d’Etudes
MPO
Spatiales
(CNES),
Instruments,
(2012Available:
http://smsc.cnes.fr/BEPICOLOMBO/GP_instr_mpo.htm, [accessed:
2012-
12-12].
[35] G. W. Fraser, E.Mathieson, Signal location using resistive anodes of Gear’s
design, Nuclear Instruments and Methods, 180, 1981, 597-601.
87
[36] G. W. Fraser, E.Mathieson, (A)Signal location uniform resistive anodes, Nuclear Instruments and Methods, 179, 1981, 591-604.
[37] G. W. Fraser, E.Mathieson, (B)Signal location uniform resistive anodes, Nuclear Instruments and Methods, 179, 1981, 591-604.
[38] G. W. Fraser X- and γ -ray imaging using microchannel plates, Nuclear Instruments and Methods in physics research, 221, 1984, 115-130.
[39] W. Parkes, K. D. Evans, E. Mathieson, High resolution position-sensitive detectors using microchannel plates, Nuclear Instruments and Methods, 121,
1974, 151-159
[40] M. Lampton, C. W. Carlson, Low-distortion resistive anodes for twodimensional position-sensitive MCP systems, Rev. Sci. Instrum., 50, 1979,
1093-1097.
[41] J. W. Stümpel, P. W. Sanford, H. F. Goddard, A position sensitive proportional counter with high spatial resolution J. Phys. E: Sci. Instrum., 6, 1973,
397-400.
[42] D. Rees et al., Minature imaging photon detectors, J. Phys. E: Sci. Instrum.,
13, 1980, 763-770.
[43] J. Vallerga, The current and future capabilities of MCP based UV detectors,
Astrophys Space Sci,320, 2009, 247-250.
[44] J. L. Wiza, Microchannel plate detectors, Nuclear Instruments and Methods,
162, 1979, 587-601.
[45] J.E. Lees, Novel electronics for MCP imaging detectors, Nuclear Instruments
and Methods in Physics Research A, 537, 2005, 621-625.
88
[46] AMPTEK, Charge sensitive preamplifier and shaping amplifier A225 A225
Datasheet.
[47] G. W. Fraser, Private communication - emails, August 2012.
89
Appendix A
JYETECH AVR ATMEGA48 CAPACITANCE METER SCHEMATIC
D
C
B
A
Cx
R16
39K
J4
1
2
3
4
J5
1
2
3
4
5
6
5
5
R15
39K
1.5K
1.5K
1.5K
1.5K
10K
R1
R2
R3
R4
1.5K
1.5K
1.5K
1.5K
1
2
+5V
DIG1
LED 4-DIGIT 0.5"
R5
R6
R7
R8
R13
RXD
TXD
+5V
R11
3.3M
J3
+5V
R12
3.3K
4
13
12
11
6
5
4
3
2
ISP_SCK 19
ISP_MISO 18
ISP_MOSI 17
16
15
14
R9
120
R10
DNI
4
U1
3
ATmega48/DIP28
9
10
1
7
20
8
22
21
23
24
25
26
27
28
Y1
12MHZ
22pF
C1 22pF
C2
ISP_nRST
C4
+5V
C3
0.1uF
10K
0.1uF
C7 0.1uF
R14
SW1
Date:
Size
A
+5V
+
1
2
2
5
VOUT
10uF/16V
C5
+5V
SW2
1
3
4
6
ISP_MISO
ISP_SCK
ISP_nRST
VIN
U2
LM78L05/T92
Document Number
2
Thursday, October 18, 2012
3
J8
1
3
5
+
1
POWERJACK-3.5
1
3
2
D1
J6
ISP_MOSI
+5V
1N4001G
C6
100uF/16V
2
4
6
HEADER 3X2
M48 PROGRAM PORT
Sheet
105-06000-00B
1
1
of
2
1
2
J1
Rev
00B
今越电子制作
WWW.JYETECH.COM
Title
Cap Meter
R10, R17, R18, AND J7 SHOULD NOT BE
INSTALLED. THEY ARE NOT REQUIRED FOR
THIS CAP METER TO FUNCTION.
R18
DNI
DNI
PC0/ADC0
PC1/ADC1
PC2/ADC2
PC3/ADC3
PC4/ADC4
PC5/ADC5
AREF
GND
GND
AVCC
VCC
PC6/RESET
PB5/SCK
PB6/XTAL1/TOSC1
PB4/MISO
PB3/MOSI/OC2A
PB2/SS/OC1B
PB1/OC1A
PB7/XTAL2/TOSC2
PB0/CLKO/ICP1
R17
PD7/AIN1
PD6/OC0A/AIN0
PD5/OC0B/T1
PD4/XCK/T0
PD3/INT1
PD2/INT0
PD1/TXD
PD0/RXD
J7
1
2
DNI
NOTE:
DNI = DO NOT INSTALL
3
D
C
B
A
90
GND
2
3
5
10
1
2
4
7
11
DP
g
f
e
d
c
b
a
C1
C2
C3
C4
12
9
8
6
Figure A.1: JYETECH AVR ATmega48 Capacitance meter schematic.
Appendix B
A125B SCHEMATIC
Figure B.1: A125B Movable MCP/RAE Schematic.
91