CALIFORNIA PATH PROGRAM . 0 Ztftf^f" I INSTITUTE OF
advertisement

CALIFORNIA PATH PROGRAM
INSTITUTE OF TRANSPORTATION STUDIES
UNIVERSITY OF CALIFORNIA, BERKELEY
Micro-simulation Modeling Approach
Applications of On-line Simulation and
.
0
Ztftf^f" I
to
Data
Fusion
LianyuChu
Will
"?*e\
Recker
California PATH Research R e p o r t
UCB-ITS-PRR-2004-1
*
*
This work w a s performed as part of the California PATH Program of the
^O
University of California, in cooperation with the State of California Business,
Transportation, and Housing Agency, Department of Transportation; and the
United States Department of Transportation, Federal H i g h w a y Administration.
T h e contents of this report reflect the views of the authors w h o are responsible
for the facts and the accuracy of the data presented herein. T h e contents do not
necessarily reflect the official views or policies of the State of California. T h i s
report does not constitute a standard, specification, o r regulation.
Final Report for Task Order 4 1 4 3
January 2 0 0 4
ISSN 1055-1425
CALIFORNIA PARTNERS FOR ADVANCED TRANSIT AND
HIGHWAYS
V
^J&*
^
J^
(. -*
Final R e p o r t for
T04143
Micro-simulation M o d e l i n g A p p r o a c h to
of On-line Simulation a n d D a t a
Lianyu Chu and Will
Fusion
Recker
California P A T H A T M S
Institute of Transportation
Center
Studies
U n i v e r s i t y o f California at Irvine
Irvine,
CA
Applications
ACKNOWLEDGEMENTS
Scott Aitken and E w a n Speirs, from Quadstone in Scotland, provided invaluable
technical supports in the process o f applying the P A R A M I C S model. Their continuous
collaboratiori to the project greatly facilitated the work.
11
EXECUTIVE SUMMARY
This r e p o r t s u m m a r i z e s research w o r k conducted under X0.4143 at the California P A T H
A T ^ I S Center at the University^of California, Irvine. This project has two tasks:
•
Functionality enhancements of the P A & A M I C S simulation m o d e l through A P I
-- programming for the on-line simulation application;
Vf
•
On-line data fusion algorithm for a better section travel t i m e estimation based o n
•point-detector, data and probe vehicle data.
In order to cpntjuct these two tasks, w e complete the following two related studies, w h i c h
are the basis of the two, tasks of this project:
• .Development ofrthe capability-enhanced P A R A M I C S singulation environment
through.API p r o g r a m m i n g ;
•
Calibration and validation of microscopic simulation m o d e l s .
in
Contents
t
i \
CONTENTS..:
t
s
X
1
C H A P T E R 1. I N T R O D U C T I O N
3
C H A P T E R 2: D E V E L O P M E N T O F T H E C A P A B I L I T Y - E N H A N C E D
PARAMICSSIMULATION ENVIRONMENT
5
2.1 n s r M o b u t r n o N
2.2 F R A M E W O R K O F C A P A B I L I T Y E N H A N C E M E N T S
2.2.1 Overview of PARAMICS
.
'
2:2.2Hbw'APl
works in PARAMICS
2.2.3 Aspects of PARAMICS need to be complemented
and'enhanced
2.2.4 Framework...t......
2.3 B A S I C M O D U L E S
2J.1 Basic control modules
2.3.2 Traffic Information Collection
2.3:3 Database connection
2.3.4 Performance measures
2.4. A D V A N C E D M O D U L E S
2.5 C O N C L U D I N G R E M A R K S
2.6 R E F E R E N C E S
^.~.T:
C H A P T E R 3. C A L I B R A T I O N A N D V A L I D A T I O N O F M I C R O S C O P I C
SIMULATION M O D E L
;..*.
3.1 I N T R O D U C T I O N
3.2 O V E R A L L C A L I B R A T I O N / V A L I D A T I O N P R O C E D U R E
3.2.1 Basic Data Input J NetworkVoding
3.2.2 Calibration of Driving Behavior Models
3.2.3 Calibration of the'Route Choice Behavior Model
3.2.4 OD Estimation
3.3 S T U D Y SITfe'AND C A L I B R A T I O N D A T A A C Q U I S I T I O N
3l.3.1 Study Site
3.3.2 Preparation of Calibration Data
3.3.3 Calibration Data Reduction
3.4. C A L I B R A T I O N
3.4.1 Basic Data Input /Network Coding
3.4.2 Calibration of Driving Behavior Models
3.4.3 Calibration of Route Choice Model
3.4.4 OD Estimation
3.4.5 Model Fine-tuning
3.5. O V E R A L L M O D E L V A L I D A T I O N
3.5.1 Determination
of Number of Simulation Runs
3.5.2 Validation Results
3.6. C O N L U D I N G R E M A R K S
5
6
6
6
6
9
10
W
13
14
14
15
16
17
18
18
19
19
19
19
19
22
23
23
24
24
24
25
25
,25
30
30
30
31
35
3.7 R E F E R E N C E S
35
CHAPTER 4 ON-LINE SIMULATION
4.1 F R A M E W O R K O F O N - L I N E S I M U L A T I O N I N P A R A M I C S
4.2 L O O P D E T E C T O R D A T A P R O C E S S I N G
4.3 T R A F F I C F L O W P R E D I C T I O N
4.3.1 Introduction
.•
*
4.3.2 Kalman Filtering basedprediction
method..*
4.3.3 Solution Jo the Kalman filter based'prediction
4 ; 4 0 D ESTIMATION MODEL
...'.
-.:
.-.
4.4.1 Volume conservation
J?„
4.4.2 Model for distributing off-ramp traffic-to upstream zones
4.5 D E M A N D L O A D I N G / V E H I C L E R E L E A S I N G ' .
<
.
4.5.1 Random model'
4.5.2 Constant headway model
4.5.3-Composite
model
4.5.4 Random number generator
4.6 R E F E R E N C E S . . / .
-.
38
:
38
39
40
41
41
42
43
43
44
44
44
45
45
46
46
C H A P T E R 5. ftATA F U S I O N F O R B E T T E R T R A V E L T I M E E S T I M S t l O N . . . . 4 9
5.1 INTRODUCTION.,.,...,
5.2. M E T H O D O L O G Y
*
,
5.2.1 Kalman Filter
5.2.2 Application of Kalman Filter to the Section Travel Time Estimation
5.2.3 Adaptive Kalman Filter:, estimation of noise statistics
5.2.4 Summary of the AKFfusion
algorithm
5.3. E V A L U A T I O N
-.
,
5.3.1 Study Site
.,-.
5.3.2 Travel Time Estimation Methods
5.3.3 Performance Indices
5.3.4 Evaluation Scenarios
5.3.5 ^valuation Results
v
;
5.4 C O N C L U D I N G R E M A R K S
;
5.5 R E F E R E N C E S
49
50
50
51
54
56
56
56
57
60
60
61
65
66
'
'
-UK J
,i
H
.1
C h a p t e r 1. I n t r o d u c t i o b
u
j.
'.This; study focuses;ori>the/use i of'micr.oscppic simulation, i.e. P A R A M J C S , a s : a . t o o ^ f o r
on-line,simulation a n d data-fusioa studies, undej: ^ t r a f f i c syste,m w i t h various. Intelligent
Transportation* S y s t e m s ..(ITS) .components. -These IT^,qojnp,onents, 1 include^actuated- /
<adaptive'signal control, ramp> metering, ftaffic suryeiltenee catneras, C h a n g e a b l e M e s s a g e
Sign (CMS)/rtooprdetector data 1 collection,,and^tjie fl-S c o m m u n i c a t i o n system> ( A Traffic
M a n a g e m e n t Center, can o b t a m traffic .data frpm m u l t i p l e sQurces. ano^control,/ m a n a g e
traffic:.This k i n d ' o f traffic s y s t e m , h a s i b e e n - i m p l e m e n t e d in .the real w,orld. J n o r d e r t o
emulate.this ITS^ready t r a f f i d s y s t e n v t b e capabilities o f c o m m e r c i a l P A R A M I Q S m o d e l
needsSOJOQ e n h a n c e d through £ P I - p r o g r a m m i n g . A s e r i e s o f A P I p l u g i n s are d e v e l o p e d
for this purpose.
;,
.Aj simulation m o d e l o f ^the, t a r g e t . n e t w o r k , w h i c h c a n . b e established u n d e r this I T S capable. traffic simulation- model'*- n e e d s t o b e ftalibrated-fiisti Ojhe,rwise, it*cahnoJ-fee-used
fociany .application., D u e ; t p t h e lack o f . s y s t e m a t i c rules/and guidelines, o f calibration and
validation o f Jraffifc m o d e l s , A . g e n e r i c appxfiach^that is., suitable fQr a n y m i c r o s c o p i c
simulation .-models is proposed. This m u l t i - s t a g e p r o c e d u r e -is d e m o n s t r a t e d gin a
.caIihration.study w i t h . a corridor n e t w o r k o f t h e southern California in P A R A M I C S .
?
'•
*
*
B a s e d o n a calibrated n e t w o r k with v a r i o u s I T S c o m p o n e n t s , w e c a n i m p l e m e n t a n d
evaluate a v a r i e t y o f A d v a n c e d T r a n s p o r t a t i o n and Information S y s t e m s ( A T M I S )
applications. T h i s project o n l y focuses o n s t u d i e s o n t h e o n - l i n e s i m u l a t i o n a n d d a t a
fusion for a b e t t e r section travel t i m e estimation b a s e d o n p o i n t detector data a n d p r o b e
vehicle data.
Potentially, t h e o n - l i n e si m u l a t i o n c an b e u s e d t o p r o y i d e r eal-time t raffic i riformation
and select t h e oest control and m a n a g e m e n t strategies a c c o r d i n g to t h e Jesting simulation
r u n s o f candidate control strategies u s i n g predicted traffic d e m a n d s . T h e task o f this
project is'to e n h a n c e the capabilities o f P A R A M I C S to enable its application for on-line
simulation. W e establish t h e c o n n e c t i o n b e t w e e n r e a l - w o r l d l o o p detector d a t a and
simulation. A- simple O D estimation m e t h o d is developed for t h e estimation o f d y n a m i c
O D d e m a n d m a t r i c e s for a freeway n e t w o r k b a s e d o n real-world l o o p detector data. A
K a l m a n filtering b a s e d traffic flow prediction algorithm is also developed. T h e predicted
traffic flows"serve for t h e prediction o f future d e m a n d matrices. I n t e r m s o f t h e d e m a n d
loading or vehicle releasing from a zone, P A R A M I C S releases v e h i c l e s b a s e d o n r a n d o m
n u m b e r s . O u r d e m a n d loading m o d e l m a k e s is possible for P A R A M I C S to release
vehicles based on a certain distribution, i.e. t h e h e a d w a y b e t w e e n t w o adjacent vehicles
subject to a c o m p o s i t e m o d e l , w h i c h is a c o m b i n a t i o n o f shifted n e g a t i v e e x p o n e n t i a l
distribution (under v e r y l o w traffic flow condition) and n o r m a l distribution with t h e m e a n
o f a constant h e a d w a y (under congested or saturated traffic condition).
T h e data fusion study o f this project is motivated b y the recent advances in surveillance
technologies, such as Global Positioning Systems (GPS), Automatic Vehicle
Identification ( A V I ) , a n d vehicle re-identification. These- technologies 'promise High
accuracy traffic information; however, their performance in field is insufficient yet
m o s t l y d u e to the lack of probe vehicles. Meantime, the m o s t prevailing traffic
surveillance system in the world is t h e conventional inductive loop detector system
although this s y s t e m often fails to p r o v i d e accurate measures:* W e discuss h o w ^ o . i m p r o v e
travel t i m e estimates from loop J detectors b y incorporating data from advanced
surveillance technology, 1 a n d p r o p o s e a data fusion m e t h o d based o n Adaptive "Kalman
Filter ( A K F ) t e c h n i q u e that dynamically calculates data noise vaYiancesibyadapting-to
the r e a l - t i m e data. T h e p r o p o s e d algorithm is t e s t e d ' a n d evaluated under b o t h recurrent
a n d non-recurrent ^congestion rising the-enhanced P A R A M I C S simulation* model. In this
study, a s a m o s t p l a u s i b l e case, w e use* two-different sources o f data: o n e from loop
detectors and t h e other from a small sample *of probe*vehicles. T h e evaluation results
sho*w that t h e p r o p o s e d fusion algorithm significantly i m p r o v e s section travel t i m e
estimates c o m p a r e d to t h e cases w h e n single data source is used.
T h i s report is" organized as follows^ Chapter 2 d e s c r i b e s " o u r development of the
capability-*enhanced P A R A M I C S singulation environment through A P I programming.
Cfiapter : 3 p r o p o s e s a general a p p r o a c h ' t o calibrate and* validate microscopic; "simulation
m o d e l s a n d p r o v i d e s a n e x a m p l e calibration study under P A R A M I C S environment.
C h a p t e r '4 e x p l a i n s ' h o w w e erihance the capabilities of P A R A M I C S in order to m a k e it fit
to t h e n e e d s of on-line simulation. Chapter 5 presents 'our-efforts on the. development of
data fusion algorithm that can provide a better estimation o f section travel time.
I >
1
••* ' i
''
'
t
t
f
1
f
-I I
,-)*
'f I
a*
'Ut .u
'•n
C h a p t e r 2. Devfeldpment of t h e C a p a b H i ^ E n h a n c e d
^ARAIVIltS Simulation Environment
$ i 1
». ./
"
2.1 I N T R O D U C t i O N
Microscopic traffic simulation is a software tool to model' the* real-world trdffic system,
including
the road, drivers, and vehicles, in fine details. In the micro-simulation process,
includ
m e sti
oasea1*
accejStanbe ^models *hxe the basic elements of a microscopic- tftCffic' simulator. "(Notable
instances of* micro-simulators i n c l i n e * ' P A R A f a l C S ; COKLSIM; V l S S I M ; A I M S U N 2 ,
T R ^ N g B ^ / a n d ' I v l l f S I M (i]:
With 1 " the 'advancements " o f c o m p u t e r technology,' micro-simulation "has b e c o m e a n
increasingly popular and e'ffective'tool for marly 'applications'; which*- are n o t aniendable to
study b r o t h e r ineahs. For the academic side1, one" application is to test new-traffic nio'dels.
For t h ? practical' side, m o s t applications are m e ^evaluation "(and development) o f
Intelligent T r a h s p o r t a t i o n ^ y s t e m s (ITS^becaiise theyaPe v difficult to-be evaluated in 1 t h e
field operational tests and they need cost-benefit analyses before their implementation [2].
In general, ITS involves the introduction of a variety of advanced technologies, such as
information'tecnnologies, to t h e transpbrtltion-systerh in order t o - m a k e ' t h e existing road
network, o'e efficiently used. Typical I T S applications'"include adaptive 'signal control,
r a m p metering, ! and"dynamic r6ute gUidarfce system; fetd. O n e of their c o m m o n "features is
mat thev'need the real-time traffic information," generally collected b y detectors o r p r o b e
vehicle's. For a complex' ITS'^strategy, 'such as Changeable M e s s a g e Sign ( C M S ) routing,
n o ? only drivers' Behaviors a n d ' r o u t e s b u t also*!traific" control 'facilities need to b e
controlled. Inbugh*current micro-simulators have enabled a lot of ITS features, it is still
impossible to implement a complicated ITS strategy b y the micro-simulatdr itself.
The'direct w a y t o ' e n h a n c e the capabilities of a1 micro-simulator is to w o r k ' o n the source
codes. Another w a l l s ' to code cofhplerrientary' of E n h a n c e d c o m p o n e n t s through
A p p l i c a t i o n ' P r o ^ a m m i r i g Interface (API)' p r o g r a m m i n g - a n d then interface t h e m to t h e
simulator! Sirice t h e ' s o u r c e c o d e is p r o p r i e t a r y / A P I p r o g r a m m i n g is a practical w a y for
users. API* p r o g r a m m i n g needs to u'se provided A P P library 'of 'a micro- simulator^ w h i c h
includes a Iset of interface functions, through w h i c h users c a n access the b o r e m o d e l s o f
t h e micro-simulator. M o s t current popular commercial micro-simulators,' 'including
P A R A M I C S , VISSIM, and A I M S U N 2, provide a series of their A P I functions for users.
This chapter will* describe our practices on developing a capability-enhanced
P A R A M I C S simulation environment through A P I p r o g r a m m i n g . It is organized as
follows. First, w e will give a b r i e f overview o f t h e micro-simulator, P A R A M I C S , u s e d
for t h e c apability enhancements. W e e xplain h o w A P I w orks i n P A R A M I C S , i n w hat
aspects w e enhance the capabilities of P A R A M I C S , and the framework o f the capabilitye n h a n c e d PARAMICS„simulation Environment-. Then, w e describe the basic enhancement
m o d u l e s in m o r e details. T h e advanced modules, developed o n t o p o f b a s i a m o d u l e s , are
further introduced. Finally, concluding r e m a r k s are presented.
2.2 F R A M E W O R K O F C A P A B I L I T Y
ENHANCEMENTS
i >
2.2.1 Overview o f P A R A M I C S
i
t
P A R A M I C S ( P / t R A l l e l M I C r o s c o p i c Simulation) is a, s p i t e of microscx>pic t simulation
tools used to m o d e l t h e moyenjenti and behavior o f i n d i v i d u a l yehiple.s on urban and
h i g h w a y road n e t w o r k s [3]. It offers, v e r y plausibly detailed m o d e l i n g for . m a n y
c o m p o n e n t s of the,traffic -system. Npt^only the characteristics o f drivers, vehicles, and t h e
interactions between vehicles b u t also the network geometry can influence simulation
results. P A R A M I C S is fit to ITS studies d u e to its high performance, scalability and the
ability o f m o d e l i n g the e m e r g i n g ITS infrastructures, s u c h as loop detectors and V M S . In
addition, P A R A M I C S proyides users w i t h A P I through w h i c h users can customize and
extend m a n y features o f the underlying simulation m o d e l without h a v i n g ^ q deal with the
u n d e r l y i n g proprietary code. T h o u g h P A R A M I C S can m o d e l s o m e simple ITS strategies,
A P I p r o g r a m m i n g is eventually required to implement m o r e complicated ITS strategies.,
2.2.2 H o w A P I w o r k s in P A R A M I C S
P A R A M J C S provides users w i t h an A P I library that include a set of interface functions,
w h i c h caiffce used to access its core,models. Basically, PARAMICJ3 provides two g r o u p s
of interface functions ? callback functions and .control functions. The. callback functions
are u s e d for p r o v i d i n g a n f o r m a t i o n about u i e attributes o f v e h i c l e s a n d their environment.
There % are ,two types o f control, functions, override and overload functions. Override
functions are used"to replace an internal function o f standard simulation loop„such as carfojjowing models.* p v e r j p a d j u n c t i o n s are used to add, a d d i t i o n a l functions to the
P A R A M I C S simulation loop.
.
. r
„ ,
,
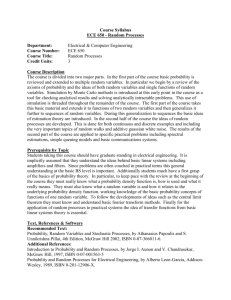
A s s h o w n in Figure 2-1, the simulation process is like this^afjer the start,of simulation,
s o m e b a s i c elemente.of.the simulation, such.as the speed and, position of yetycles^traffic
signals, etq., a r e - u p d a t e d a t every time,, step. I f an A P I m o d u l e . i $ r i n y o j v e d in the
simulation, it m a y , w o r k at ev^ry time step", or be triggered aj a,specific simulation t i m e orj
b y a .specific event. I n ..general, an. a\PI m o d u l e .gets necessary infprmatjon from the]
simulation world through callback f u n c t i o n , a n d then a f f e c t s ' t h e - s i m u l a t i o n through]
control functions.
~
->
;o»
«
t
0
2.2.3 A s p e c t s o f P A R A M I C S nee$l-to b e complemented and enhanced^
r*
Tach micro-simulator Has its'-own features to-simulate the r e a l - w o r l d traffic.-Specifically
pop P A R A M I C S , m a n y - a s p e c t s £ f P A R A M I C S n e e d ' t o i b e r c o m p l e m e n t e d - a n d enhanced
[through A P I p r o g r a m m i n g in o r d e r t d . b e t t e r m o d e M T S i O u r current efforts are limited to
I the following basic aspects of the software.
*
U p d a t e vehicles and
their environment at
e v e r y time step: '
"S3
Callback
<< en
i =
5> 6
"• i
Override
*~~
Overload
I I
•<
X*
**1
I
I
O t h e r applications
e.g. database
Figure 2.1 T h e P A R A M I C S simulation p r o c e s s w i t h A P I m o d u l e s
2.2.3.1 Routing
P A R A M I C S is a lirik-based simulator. Vehicles being simulated do n o t carry their w h o l e
routes b u t decide thejr-route based on the routing table stored at each node, along its route.
These routing tables are prejcalculated based on the currently used traffic assignment
method. A path-based routing m e c h a n i s m is required fo/ the applications qf traveler
information related ITS strategies, such as d y n a m i c route guidance or C M S routing.
2.2.3.2 Real-time traffic information collection
T h e c o m m o n feature o f ITS,is that ITS needs the real-time traffic information, generally
collected b y detectors o r probe, vehicles, for decision-making. P A R A M I C S can m o d e l
loop detectors, the m o s t frequently used sensors in the real world. H o w e v e r , aggregated
loop data, which are generally provided by freeway systems and can be used for real-time
traffic control, c a n n o t b e obtained d i r e c t l y from P A R A M I C S simulation. Also, the
c o n c e p t o f p r o b e v e h i c l e s needs, P A R A M I C S to track a certain percentage o f p r o b e
vehicles- and extract travel t i m e or travel speed information from them. This cannot b e
d o n e without the i n v o l v e m e n t of A P I p r o g r a m m i n g .
2.2.3.3 Signal control
P A R A M I C S can basically m o d e l the fixed-time signal control. Besides, P A R A M I C S also
p r o v i d e a plan/phase l a n g u a g e (i.e. a kind o f script language) to simulate some simple
actuated signal control logics. However, in the field,, the w i d e l y used actuated signal
controller uses t h e c o m p l e x N E M A logic or t y p e - 1 7 0 l o g i c , O u r "experiences found this
script language is difficult t o b e used to m o d e l these c o m p l e x control logics and to
replicate these logics to multiple signalized intersections.
2.2.3.4 R a m p m e t e r i n g control
i
P A R A M I C S can m o d e l fixed-time ramp metering with multiple timing plans. H o w e v e r , a
ramp-metering controller, developed^ in P A R A M I C S A P I , is required for the support of
development of adaptive r a m p ' metering -algorithms, w h i c h h a v e m o r e complicated
control logics. T h e r a m p - m e t e r i n g cbntroller should p r o v i d e interface functions that c a n
b e used for querying t h e old metering rate and s e t t i n g ^ n e w metering rate based on the
adaptive r a m p m e t e r i n g algorithms. W h e n the adaptive ramp-metering algorithm is not
activated, the fixed-time m e t e r i n g will b e the default control.
2.2.3.5 Database connection
P A R A M I C S does n o t h a v e the capability to connect with a database. T h e advantage o f
t h e u s e o f database i s that database c a n b e c o m e t h e m e d i u m w h e r e A P I m o d u l e s c a n
e x c h a n g e data w i t h outside p r o g r a m s or applications.
2.2.3.6 Performance m e a s u r e
P A R A M I C S h a s s t r o n g abilities o n the collection o f statistics data. Except some general
performance data, P A R A M I C S can output link-based, trip-based, intersection : based, and
detector-based data. H o w e v e r , the current difficulties are
1. W i t h the increase o f the size o f the network, 'the n u m b e r ' o f l i n t s / trips,
intersections, a n d detectors increases drastically*in P A R A M I C S .
2. Large a m o u n t o f data-are required to b e processed after, simulation runs in order-to
f
J
obtain the expected" performance measures-.
3. Some'f5er'formance measures, such as on-ramp waiting time, c a n n o t be extracted
from output m e a s u r e m e n t data.
4. P A R A M I C S h a s a restriction on the n u m b e r 6 f ou'tfrat'files t o b e opened-during
simulation u n d e r W I N D O W S version.
T h e u s e ' o f A P I t o collect performance m e a s u r e s can effectively-decrease the amount of
data'post-proc'essing w o r k s ' a n d obtain m o r e performance m e a s u r e s directly.
•J
*
.
,
r
2.2.4 Framework
-
-
,
The above capability^enhancements-are- focused o n the^ba^iC 1 aspects o f the microsimulator, P A R A M I C S . - E a c h of these basic m o d u l e s refers tb an important aspect o f
simulation. T hese functionality-jenhanc'ements c ( an b e e lassified i nto the following f o u r
categories:
i ' .__
1. Basic control-modules, including signal, ramp m e t e r i n g a n d routing
2. Traffic information collection
3. Database connection • t
*r
4. Performance measures
J
x
*
Figure 2.2 s h o w s 'the-framework-*)f the .capability-enhanced* P A R A M I C S simulation
environment. A n y an A P I m p d i i l e j n th'e_eiman,ced~PARAMICS environment exchanges
dynamic data with thefcore P A R A M I C S imodel and-other advanced Af(l m o d u l e s through
the Dynamic Linking L i b r a r y (DLL) m e c h a n i s m !
Besides these basjc r m^dujes, ttie capability-enhanced P A R A M I C S -environment also
includes advanced modules. Examples o f advanced m o d u l e s include r a m p metering
algorithms, adaptive signal control, and integrated control, w h i c h include^several I T S
components. These advanced m o d u l e s are developed on top o f .basic enhancement
modules. This hierarchical A P I development approach, demonstrated in Figure 2.3, can
thus re-use the codes developed in the basic modules.
Advanced Modules
Figure 2.2 Framework o f the capability-enhanced P A R A M I C S simulation
Signal
Provided
A P I Library
Ramp
-*•
Control
Modules
->
1 1
w
Basic
modules
r >
w
Data
Handling
w
^-w
fr
V
Advanced
Modules
—
Routing
Loop...
CORBA
Database
XML...
Adaptive Signal Control
/ i f '
•l
• Rantp'trfetering alg6rithms
Integrated Control
F i g u r e 2.3 T h e hierarchical A P I development approach
2.3 B A S I C
MODULES
2.3.1 Basic control m o d u l e s
2.3.1.1 Full-actuated Signal Control
T h i s plug-in m o d u l e i m p l e m e n t s the eight-phase, dual-ring, concurrent controller logic.
T h e d a t a input t o t h i s A P I is t h e signal t i m i n g plan, t h e geometry a n d detector
informatiorjbof e a c h intersection. Interface functions h a v e b e e n provided b y this A P I for
external, m o d u l e s to acquire and change the default tjming plan. This A P I provided a
couple of interface functions for external A P I m o d u l e s to acquire- the current signal
t i m i n g plan and set a n e w j i m i n g p l a n to a specific signal. A n - a d v a n c e d signal control
algorithm A P I c a n be-further developed b a s e d on them. T h e prototypes o f these, interface
functions are s h o w n b e l o w [4],
'
u
S i g n a l * s,ignaKgetj)aranieters(char * n o d e N a m e ) ;
Function:
Q u e r y i n g t h e current signal t i m i n g p l a n o f a specific'actuated signal
R e t u r n V a l u e : J h e - c u r r e n t t i m i n g p l a n o f a n .actuated signal.
10
Parameters:
n o d e N a m e a s the .name of the signal n o d e :
fa
- wu
S i g n a l is t h a s t r u c t u r e of actuated signal data,;whose definition is:
type Signal
- •//intersectionname t ahd"lo'cafion
char *node;
char *controllerLbcation;
((H
*I
r
/ \
II signal parameters *
int movements[8]V
float m a x i m u m G r e e n [ 8 ] ;
float-minimumGreen[8]; - float ex(eh'sjon[8];"
' ?'
fioVsWe&teip];
'
float pha^eGreenTirfie[8];-'
float m o v e m e n t G r e e n T i m e [ 8 ] ;
l
// current p h a s e information
int currentPhase;
i n t expiredTimeJ '*
float redTimeLeft;'
B o o l cycleEhdFlag;' •
V o i d s i g n a l _ s e t _ p a r a m e t e r s ( S i g n a I *sig);
Function:
- Setting a ' n e w tiniirig p l a n id zfspecific signal/
Return Value: N o n e
"
'"
Parameters*! 1 sig stores the n e w t i m u i g p l a h .
2.3.1.2 Rdrhp-Met'ering'Coritr6l
'
This plug-in module is designed to m o d e l pre-timed r a m p m e t e r i n g control on either onecar-per-green basis o r n-cars-pef-gre'eh basis (with n >'l)V'It'alsb s(i{)pofts'mulfiple.'timihg
plans, H O V bypass, a n d the Us'e o f r a m p detedtofs for m e t e r i n g ' control. T h e data ifiput o f
this A P I is a time-of-day r a m p control plan'ancfthe detect'of'ififormation'ofeach meter. In
addition,-this A P T provided £ c 6 u p i e ' ' o f interface-functions for external A P I m o d u l e s to
acquire the current metering rate and set a n e w metering 'rate* to a specific r a m p meter. A n
advanced ramp-metering algorithm A P I can b e further developed based on these interface
functions. T h e prototypes of t h e m are shown below.
R A M P * r a m p _ g e t _ p a r a m e t e r s ( c h a r *rampnodje) /
Function:
Querying the current metering p l a n o f a specific'jamp meter.
Return Value: The current metering control plan of an o n - r a m p signal.
11
m
Parameters:
r a m p n o d e is t h e n a m e o f an o n - r a m p signal node.
R A M P is the structure o f r a m p control data, w h o s e definition is:
type R a m p
{
// o n - r a m p signal n o d e n a m e a n d its location
char
*rampNode;
char
*controllerLocation;
// r a m p control types and parameters
int
ControlType;
float
meteringCycle;
};
W h e r e c o n t r o l T y p e is t h e ' s t a t u s , ( o r t y p e X o f the r a m p metering control,
w h i c h c a n be 0 (if R A M P _ C L O S U R E ) , ' l ( i f s H A M P _ O N with single-entry
metering), 2 (if R A M P _ O N w i k i p l a t o o n metering) and 9 (if R A M P _ O F F ) .
v o i d ramp_set__parameters (RAlVtP * r a m p , B o o l staus)
Function:
Setting a n e w m e t e r i n g rate, to a specific r a m p meter.
R e t u r n Value: N o n e
Parameters:
r a m p stores the n e w metering control-data o f a specific on-ramp;
status is a Boolean value. s t a t u s = r T R U $ m e a n s to set a n e w metering
rate b a s e d on an external algorithm; status = ; F A L S E m e a n s to restore the
default time-of-day timing plans.
2.3.1.3 Path-based routing
T h e path-based routing plug-in .module establishes tlje- m e c h a n i s m for vehicles to follow.
a g i v e n p a u \ w h i c h is an essential requirement for the simulation o f ^ r i y e r responses to
the informatiorTsupply and the resulting route choice. O n l y those vehicles tha,t need to
follow specific p a t h s will guided b y this A P I and other vehicles will select route based on
the internal routing m e t h o d o f P A R A M I C S . O n e interface ^function of this-plugin, -which
is u s e d to set a path for a vehicle to follow, is shown as follows:
v o i d u c i _ v e h i c I e _ r o u t e _ s e t ( v p i d * Y p , V ^ O U T E route),
>
,4
fj
(
Parameters^
Y p : t h e pointer o f p. v e h i c l e r e q u i v a l e n t t q vehicle I p f 3
,
/ w j
rou^e is«the initial address of the w h o l e patfw . ,
,# w ,
t,
V R O y T E is a link r Iist storing, w h o l e patli Jhe, vehicle, should follow,
w h i c h is defined-as:
..
,
typeVROUTE
d
{
'
// link n a m e along the route
r
char • l i n k N a m e ?
' **
VROUTE*next;'M'
! '-:* r ^c
1 c
12
• n-w*i* i w
2.3.2 Traffic rnformatioh Collection
J
.tt„
2.3.2.1 Lodp-detector.data
n
i tf
.>o
In the real world, loop dejectors are .placed »qn freeways' and artdrials for collecting
aggregated d a t a . a t ascertain time-interval ( t y p i c a l l y ^ O seconds) ,for the purposes o f
traffic a n a l y s i s a n d traffic control. T h e s e a g g r e g a t e d l o o p d a t a a r e s t o r e d e i t h e r i n t h e
database or shared m e m o r y . Other traffic operation.c&mponents canigetf-access ; to these
data through data communication networks and u s e t h e m for generating real-time control
J
strategies,
.-i - ^ ^
Ja
>
>'
T h e l o o p ' t a t a aggregator A P I works.as the,traffic data c o l l e c t i o n andrprovisior^ server in
-the enhancedvPARAMICS environment. Itemulates.thejreaL-world data collection from
inductive loop detectors and broadcasts the latest aggregated loop data,t o. the d y n a m i c
m e m o r y during simulation. Other A P I m o d u l e s c a n obtain t h e s e data in real t i m e t h r o u g h
the interface function provided by this A P I . In addition, this^API- c a n report the
aggregated loop data to text files or the M Y S Q L database as performance m e a s u r e s for
-data analysis and performance comparison.
O n e interface function o f thfsrAPI c a n - b e u s e d f o r q u e r y i n g t h e # g g r e g a t e d loop d a t a at a
detector station at a certain time interval.' T h e aggregated loop data includes, grouped
volume, average o c c u p a n c y a n d average speed, a s well as lane-based v o l u m e , average
occupancy and'average speed.
- L O O B A G G l o o p ^ a g g ( c h a r *dete.ctorName)'
Return Value: T h e aggregated detector data o f a loop detector
Parameters:
d e t e c t o r N a m e : loop detector n a m e
L O O P A G G is a structure that h a s t h e following definition:
typeXOO?AGG,
i
U i.
int
i detectorlndex;
float
AggregationTime;
lane;
int
int
g_vol;
float
g occ;
float
g_spd;
*vol;
int
float
*occ;
float
*spd;
J:
where
d e t e c t o r l n d e x is the network-wide index for the detector;
13
waprrt * tt-r,
A g g r e g a t i o n t i m e is the time o f the latest aggregation, determined b y the
loop data collection interval;
g_vol is the total traffic counts passing all lanes o f a detector station;
g_occ is t h e average o c c u p a n c y o f all lanes at a detector station;
g _ s p d is the average speed o f all vehicles passing ja detector station;
lane is the total n u m b e r o f lanes at the detector station;
*vol; *occ, and ^spd are-pointers for recording value&of,volume,
o c c u p a n c y and average, speed at each lane of a detector station.
!
1
2.3.2.2 Point-to-point travel t i m e data collection
Similarly, w e d e v e l o p a p r o b e vehicle A P I to simulate point-to-point travel t i m e data
collection through G P S equipped vehicles. T h e sample rate, w h i c h is equivalent to the
percentage o f G P S - e q u i p p e d vehicles, c a n b e specified through control,interface. Pointto-point 'travel t i m e data can b e output to the 'dynamic m e m o r y and text files or .the
M Y S Q L database:
2.3.3 Database connection
t
M Y S Q L d atabase i s c urrently r egarded a s t h e m ost p opular a n d h ighly e fficient O p e n
Source S Q L (Sequential Q u e r y Language) database in the world. W e developed the
interface functions, including a s e t o f simple C r b u t i n e s ' p r o g r a m m e d 'in*MYSQL A P I , in
order to c o n n e c t r P A R A M I C S w i t h M Y S Q L database:
.r >
. r
M Y S Q L database can thus b e used for storing intermediate simulation data o r final
simulation r esults if 1 arge a m o u n t s o f d ata a re g enerated. In a ddition, A P I m odules o f
P A R A M I C S can also get access the database duringrthe simulation to pbtain^'outside data.
*j'
•i
2.3.4 Performance m e a s u r e s
'••
*
i »
*
i
A n important aspect of the evaluation studies -is to use -some overall performance
m e a s u r e s to evaluate h o w the, implementation of an 'ITS strategy benefit the whole traffic
system, including the freeway and arterial part of the network. T o b e m o r e efficient to
evaluation studies, w e developed a M O E A P I for Computing, gathering and reporting a
n u m b e r of user-preferred overall performance" measures, each of which corresponds to a
specific aspect of interest.
i
2.3.4.1 Overall performance
M O E # 1 sy stem e fficiency m easure: a verage sy stern* t ravel t ime ( A S T T ) o f t he w hole
simulation period. A S T T is calculated a s the weighted m e a n o f the average travel times
of all O D pairs
.
'*
(2.1)
vi.y
/• v/.V
."U 'U
14
where Ntf is t h e total h u m b e j o£v.ehicles that'actuall>aravele'd*from. t origin'i to.destination
jl-Tfi is t h e . a v e r a g e £ ) D travel t i m e ^ r o m origin"/ urdestinationy';<•
t
M O E # 2 s y s t e m - r e l i a b i l i t y m e a s u r e : a v e r a g e staridard, deviation q f > O D t r a v e M i m e s
( S t d e v X T ) o f the e n t i r e - s i m u l a t i o n p e r i o d . . S t d e v ^ T T * i s : calculated as.-the w e i g h t e d
.standarddeviation f ofthe;av'erage*travel t i m e s ,ofallJQD pairs for t h e w h d l e studyiperiod:
StdevJT
w h e r e Std(T{J
destination^".
= ^(Std(TiJ)*NiJ)
fiTNu
(2.2)
> , f
is the standard deviation o f t h e average p D travel t i m e from origin / to
2.3.4.2 F r e e w a y P e r f o r m a n c e
M O E # 3 freeway efflciency'measure t
fi
(1) average m a i n l i n e travel speed o f the" entire simulatiorrpprjod%AMTS)
(2) average m a i n l i n e travel speed during ithe congestion period (peak__AMTS). T h e
congestion p e r i o d is defined a s t h e c o n g e s t i o n p e r i o d o f t h e baseline-scenario.
•a
r
M O E # 4 o n - r a m p efficiency m e a s u r e
(1) total o n - r a m p d e l a y ( T O D )
(2) t i m e p e r c e n t a g e o f the o n - r a m p q u e u e spillback to t h e local streets ( P O Q S )
2.3.4.3 Arterial P e r f o r m a n c e
M O E # 5 arterial efficiency m e a s u r e
(1) average travel t i m e from t h e u p s t r e a m e n d to the1 d o w n s t r e a m e n d o f an arterial
(ATT)
(2) th&stahdard d e v i a t i o n o f A T T ( s t d ^ A T T )
2.4. A D V A N C E D
MODULES
A n advanced m o d u l e , such as a signal coordination strategy, adaptive r a m p m e t e r i n g
algorithm, or ah 1 '"integrated 'control strategy, generally i n v o l v e s ' t h e control 6 f o n e or
several'control c o m p o n e n t s , 1 including signals, r a m p s , V M S , a n d rbufirig vehicles,' b a s e d
on traffic information. A s intfbSuced m Section 2 ' 4 7 l h e c a p a b i l i t y - e n h a n C e d ' P A R A M l C S
environment u s e s a hierarchical' a p p r o a c h t o cleVelop a d v a n c e d mo'dufes. In o t h e r w o r d s ,
advanced m o d u l e s are developed based oh several basic m o d u l e s , 'which c a n b e accessed
b y interface functions provided b y b a s i c m o d u l e s .
A s an example, Figure* 2.4 describes h o w an a d v a n c e d r a m p - m e t e r i n g algorithm is
developed. T h e a d v a n c e d A P I is built on t o p *of t w o b a s i c p l u g - i n m o d u l e s , i.e., r a m p
metering controller and loop data aggregator. T h e entrance r a m p signals in the simulation
n e t w o r k a r e controlled b y t h e r a m p m e t e r i n g A P I , t h r o u g h w h i c h m e t e r i n g rates c a n b e
15
queried and set b y other A P I m o d u l e s . T h e loop data-aggregator API-emulates the realw o r l d loop data collection, typically with a thirty-second interval, a n d broadcast :the latest
loop data to the d y n a m i c m e m o r y . T h e advanced A P I can access the d y n a m i c m e m o r y
and obtains the required loop d a t a through interface functions provided b y the loop data
aggregation A P I . T h e n t h e m e t e r i n g rate for t h e n e x t control interyal is. calculated* based
o n 'the advanced r a m p - m e t e r i n g algorithm.' T h e n e w metering rate is sent back to the
r a m p controller A P I for implementation [5].
PARAMICS
simulation
New rate
nA
Provided API
R a m p metering
Controller
New rate'
1
Loop Data
Aggregator
Old metering rate
Loop data
Advanced
ramp-metering algorithms
Efasic API modules
i
Advanced API modules
Figure 2.4 T h e hierarchical approach to develop advanced r a m p metering m o d u l e
2.5 C Q i y C U J B I N Q JUEJMARKS
T h i s chapter presents our practices on the> d e v e l o p m e n t , of a capability-enhanced
P A R A M I C S simulation environment through integrating s o m e plug-in modules
implemented in P A R A M I C S A P I . T h e s e plug-in modules c o m p l e m e n t and enhance the
functionalities o f t h e commercial P A R A M I C S m o d e l ^ A s a - r e s u l t , the capabilitye n h a n c e d P A R A M I C S simulation can better m o d e l and evaluate ITS.
Our.,experiences s h o w that AJ*I ,can be, used to access .thg core m o d e l s r o f f a - m i c r o sirnulator and potentially, researchers.can u s e ' c o m m e r c i a l micro-simulatprs^as a shell for
testing their o w n njQdels gnh algorithms. Since other commercial micro.-s^mulators. such
as VTSSIM and A u M S y N t 2 , £lso .provide users with their owji A P I functipns, .users can
replicate o u r m e t h o d s jto e n h a n c e their capabilities.,
O u r current capability enhancements o f P A R A M I C S only cover s o m e aspects of the
micrq-sjmulator, m o r e efforts a r e .expected in order to m a k e the enhanced P A R A M I C S
better fit to ITS-related studies.
••> ,,
'i
•
~* *
16
ifcitiig-m
2.6 R E F E R E N C E S
J ' C f t > * K i P * 1'* - \ * j V . / sa,» #* «• » , K
1. Jayakrishnan, R., Oh, J., and Sahraoui A. (2001) Calibration^ and Path D y n a m i c s
Issues in Microscopic simulation For Advanced Traffic M a n a g e m e n t and
Information Systems, 80th Transportation Research Board Annual Meeting,
Washington D.C.
2. Algers, S., Bernauer, E., Boero, M., Breheret, L., di T a r a n t p , £ . , Dougherty, M-,
Fox, K., and J. Gabard (1998) Smartest Project deliverable D 3 . University o f
K kee4?- h
.
,. mL ,
\
\
Srnith, M . , \ S. Druitt, G. £ a m e r o i j and D . MacArthur, Paramics final R e p o r t ,
Technical Report E P C C - P A I ^ A M I C S - F r i ^ A L / ' U n i v p r s i t ^ of" Edinburgh, July,
. W , "
'
. ' " .„ \
i ',. " r
v
" ,
.
• ,4. Liu, X., C h u , L . , and Reqke?;, W . ,(2001) P A R A M I C S . A P I R e s i g n p o c u n i e n t for
.r.„Actuated ;SignaI^ -Signal ,Coprdinatipn .and (Karnp QontrpI, California P A T H
WorkingjPaper, U g B - I T S , : P \ ^ P - 2 0 c ( l r l i , University o f California at Berkeley,
200 L > > * .
*
'
5. Chu, L., Liu X., Recker, W., Zhang, H . M . (2002) P e r f o r m a n c e Evaluating of
,
Adaptive f J^amp^ .Metering Algorithms, .accepted,, ,by A S C E _ J o u r n a l of
Transpqrtationingjneering. t
,,
t
17
C h a p t e r 3. Calibration a n d Validation of
Simulation
3.1
Microscopic
Model
INTRODUCTION
Simulation m o d e l i n g is a n increasingly p o p u l a r and effective tool for analyzing
transportation p r o b l e m s that are n o t amendable 1 *to s t u d y b y other rrieans'. In the
transportation simulation field, there is g e n e r a l agreement that microscopic-simulation,
i.e., a computational resolution d o w n to the level of individual travelers, is n o w a viable
alternative and m ^ y b e t h e only answer to questions arising from a w i d e variety of
problems 1 . 1 Recent a d v a n c e m e n t s in computer 1 technology h a v e led to*th6 development of
h i g h fidelity m i c r b s c o p i c simulation models: E x a m p l e s -of w i d e l y u s e d microscopic
traffic simulation m o d e l s are AEVISUN2, M I T S I M , P A R A M I C S , a n d VISSBvI.
A microscopic traffic simulation model' generally includes physical components, s u c h as
the r o a d w a y n e t w o r k , traffic control systems, and drive'f'-vehicle units, etc., and
associated behavioral m o d e l s , such as driving behavior m o d e l s and route choice models.
T h e s e components and m o d e l s h a v e complex data requirements and numerous m o d e l
parameters. Although m o s t simulators provide data input guidelines and default m o d e l
parameters, these m o d e l s nevertheless n e e d to b e calibrated for the specific study network
a n d t h e intended applications [1].
I n t h e traditional p r o c e s s o f m o d e l calibration, m o d e l p a r a m e t e r s are adjusted until
reasonable (qualitative and quantitative) correspondence b e t w e e n the m o d e l and fieldobserved data is achieved. S u c h adjustments with multiple parameters are a timec o n s u m i n g ^ a n 4 tedious process. T h e trial-and-error m e t h o d based on engineering
j u d g m e n t or experience is usually employed for m o d e l calibration. M o r e systematic
approaches include t h e gradient approach a n d Genetic A l g o r i t h m s ( G A ) [2, 3]. T h e s e
approaches regard t h e m o d e l calibration procedure as a n optimization problem in w h i c h a
combination o f p a r a m e t e r v a l u e s that b e s t satisfies an objective function is searched.
M o s t calibration efforts reported in the literatures have focused on either the calibration
of driving behavior m o d e l s [3, 4, 5, 6], or the calibration of a simple linear freeway
n e t w o r k [2, 7, 8, 9]. H o w e v e r , these studies represent only an incomplete process of
m o d e l calibration a n d validation. In order to analyze network-wide transportation
problems, it is necessary to include n o t only driving behavior m o d e l calibration b u t also
d y n a m i c O D estimation and route choice in t h e calibration process.
T h e purpose of this p a p e r is to p r o v i d e a systematic, network-level calibration and
validation framework for microscopic traffic simulation models. Along with the
framework, w e p r o v i d e a case study to demonstrate h o w w e calibrate a corridor network
consisting o f b o t h a freeway a n d its adjacent parallel streets using the P A R A M I C S
microscopic simulation model.
This-chapter j s i o r g a n i z e d as^follows: an joverall-calibration a"nd validation procedure j s
proposed irtSection 2. The'third'section brieflydescriaes\the study, n e t w o r k "and data used
i n ' t h e ' c a l i b r a t i o n study. "Sectjoni 4 explains the. details* o f hosv* the study n e t w o r k , is
c a l i b r a t e d ' u s i n g ' the proposed procedure*; The> m o d e l validation results are* given in
Section 5. Discussion a n d conclusions are presented in t h e last section.
3.2 O V E R A L L C A L I B R A T J O N A ^ A L I D A T I O N I P R O C E D U R E
t
Model calibration involves checking t h e - m o d e l results against observed data and
adjusting parameters until the, model results "fall Within "an'acceptable r a n g e o f error.
Various components in microscopic simulation 'models 1 are calibrated according to the
following procedure, as s h o w n iiTFfgure T.l.
3.2.1 Basic D a t a Input / N e t w o r k Coding
T h e first step is to input basic dataj including-network- geometry,, travel d e m a n d , drivers,
vehicle characteristics, and'traffic c o n t r o l s y s t e m s . T h e ' a c c u r a c y and/or availability o f
these data are very important-because-these-inputs-directly-affect 1 the performance o f the
micro-simulation m o d e l s , , and the accuracy of such inputs n e e d s to b e taken into
consideration during the "model calibration and" validation procedures. F o r most cases,
demand data are not a v a i l a b l e ? T h e proposed procedure includes the O D estimation as a
part of calibration in step four.
3.2.2 Calibration of Driving Behavior M o d e l s
T h e second step involves the calibration o f d r i v i n g b e h a v i o r m o d e l s using either
disaggregated data Or aggregated data. T h e driving b e h a v i o r m o d e l s include carfollowing (or acceleration) and Jane-changing modejs, w h i c h govern vehicular traffic
m o v e m e n t and need to b e calibrated,for the specific region. Global parameters o f these
models are calibrated w i t h i n t h e sub-network level.
3.2.3 Calibration of the R o u t e Choice Behavior M o d e l
T h e third step is to calibrate the route choice b e h a v i o r m o d e l , w h i c h m u s t b e conducted
o n a network-wide level. T h e route ^choice behavior m o d e l c a n be calibrated using either
aggregated data or b y aggregating individual data obtained from driver surveys.
3.2.4 O D Estimation
T h e next step is OD^estimation and/or model adjustment. T h i s step involves several tasks
if applicable.
3.2.4.1 Acquisition o f O D demand^pattem
19
TB-- - rg,-'*^yrw !•- •»'
A simulation m o d e l n e e d s to h a v e a n O D d e m a n d pattern a s a starting point o f t h e
calibration. A g o o d s o u r c e of-this is from the p l a n n i n g m o d e l s , such as Transplan and
T r a n s C A D b a s e d o n t h e social-economic data of the target network. Q f course, this O D
d e m a n d pattern c a n also b e obtained from the. traditional four-step m o d e l calculation
u s i n g t h o s e s o c i a l - e c o h o m i c data.
Calibration data preparation
I
Basic data input / Network coding
I
Calibration of driving behavior models
I
Calibration of routing-behavior model
Reference O D from planning model
Route choice adjustment
(
Total O D estimation
Reconstruction of timedependent O D demands
j
:
:
:
:
=
i
^
g
:
:
:
:
-
Fine-tuning parameters
.«»i
/
Overall m o d e l '
validation / Evaluation
Figure 3.1 Flow chart o f calibration procedure
20
'
3.2:4.2'Modification .of rouje choices *
,!'• • • "
u
This-task-irivolvesvthe. modification of *the "route/link^ specific, c o s t ' i n r o r d e r to reflect
r e a s o n a b l e , r o u t e x h o i c e s ^ I n t h e . O D e s t i m a t i o n , p r o c e ' s s , all m o d e l ' p a r a m e t e r s a n d route
choice -behayjrorsftneed -to .be fixed ifirst .since, .this [ p r o c e s s is. ;based on .JheMraffic
assignment matrix that is affected by* any c h a n g e in simulation inpufcor parameters.
3.2.4.3 F i n e - t u n i n g t h e total O D matrix
•
*- «
T h e O D (Jemand matrix from the planning m o d e l is not accurate enough" and thus this
matrix can**become a starting point of the calculation o f ' a better 6 D matrix. T h i s O D
matrix can be called the total O D d e m a n d matrix that needs to cover the w h o l e simulation
period. Th£-estimation of the total O D matrix is an iterative process t o m a t c h simulation
results with the aggregated traffic v o l u m e observations at s o m e specific m e a s u r e m e n t
locations. T h e objective of this process is:
.jnin' \^{VOh^[n)-VOLsimin))2
(3.1)
where N is the total n u m b e r of ( measurement locations.
I s *
A *
f
,
This O D estimation process can b e conducted outside of t h e microscopic simulation
m o d e l . ( There, are some, software tools, such as T r a n s C A D , Q u e e n s O D that c a n hejp the
estimation of a static OD.. However, this m a y .cause, some, O D estimation r errors if
different traffic assignment m e t h o d s are used in the 6 p estimation .process and the
microscopic simulation. The microscopic simulation models h a v e started to develop their
o w n O D estimation tool in order to avoid this problem. F o r example; I N T E G R A T I O N
provides Q u e e n s O D as its O D estimation tool and P A R A M I C S provides an O D estimator
tool in i t s n e w , version.
3'
3.2.4.4 D y n a r n i c O D estimation
I n order, to obtain a m p r e accurate simulation model, t h e - d y n a m i c .(or time-dependent)
O D estimation is required. Theoretically, it is a dynamic O D d e m a n d estimation p r o b l e m ,
which m a y not need a total O D as basis. So far, there is not an effective m e t h o d that c a n
solve tljis prpblern .[15,16], except that the F R E Q m o d e l can b e used for the estimation of
time-dependent O D o f freeway,network for,micro-simulation [7].
This estimation is generally based on the total O D d e m a n d matrix,, estimated in a
previous step. This dynamic O D estimation process can be regarded as a process that
assign the total O D to'detailed time slices. T h o u g h some existing O D estimation tools, i.e.
QueenOD i a n d Estimator of P A R A M I C S , h a y e . a certain potential to handle the dynamic
O D estimation, their capabilities are not recognized.
3.2.5 Model Fine-tuning
21
T h e last step o f calibration is m o d e l fine-tuning using aggregated traffic data in order to
reflect network-level congestion effects. T h e driving behavior m o d e l s need to b e further
validated locally (intersection-by-intersection or junction-by-junction) and adjusted to
reflect the local characteristics. T h e local characteristics .can- b e b a s i c a l l y examined
t h r o u g h the c o m p a r i s o n o f v o l u m e - o c c u p a n c y curves drawn based o n aggregated point
detector data from b o t h simulation and the real world.
T h i s step o f calibration is performed as a two-objective optimization process:
min
T N
££(row«.0-raw«.'))2
r
min
(3.2)
N
ZS(7T^("*')_7T^(n»'))2
/-I n-1
(3.3)
T h e t w o objectives c a n b e called v o l u m e m a t c h and travel t i m e m a t c h . S o m e previous
calibration efforts actually started from this point [2, 8]. This is the reason that w e think
that t h e c u r r e n t s t u d i e s represent o n l y an i n c o m p l e t e p r o c e s s o f m o d e l calibration a n d
validation process. U n d e r the following situations, there is no p r o b l e m to start calibrating
a n e t w o r k from this step:
(1) T h e network h a s been coded and roughly'calibrated.
(2) T h e driving b e h a v i o r m o d e l s h a v e b e e n calibrated a n d validated based o n
previous studies on the s a m e network.
(3) There is no* data that'can support the calibration of route choice model 1 , or o n e of
' the route c h o i c e m o d e l s in the m i 6 r o s c o p i c s i m u l a t o r can b e accepted.
(4) T h e ' O D d e m a n d matrices h a v e b e e n given.
'
3.2.6 M o d e l Validation
M o d e l validation is typically an iterative process linked to each model- 6alibration. T h e
m o d e l validation is generally conducted with a different data set o f larger area within the
m o d e l i n g n e t w o r k in order to check if the calibrated m o d e l 'parameters -are 1 suitable.
M o d e l validation is regarded as a final stage to investigate if each c o m p o n e n t adequately
reproduces observed travel characteristics and the overall performance o f the m o d e l is
.
10
reasonable.
I.J.
T h e following'sections o f this ^chapter'will'focus o n ' a case-study tha^ follows the above
procedure o f m o d e l calibration "and valiaatiorf to calibrate a" network*'in a P A R A M I C S
(version 3.0 Build 7), a widely used microscopic simulation m o d e l developed b y
•i *
Q u a d s t o n e in Scotland.
'
3 . 3 S T U D Y S I T E A N D C A L I B R A T I O N bjiTA
ACQUISITION
!
T h e data are an important issue in the calibration of a microscopic simulation moflel. T h e
m o r e data and the better data w e have, the better the calibration result can be achieved. In
22
this section,* w e talked about dataussues, b a s e d .on our practices jri the calibration o f the
case study network-in P A R A M I C S .
i
3.3.1 Study Site
Vl
The^shidy'network is a h i g h l y x o n g e s t e d ^ O r r i d o r network i r r t h e c i t y ' o f Irvine,/Orange
County, X a l i f d r h i a ; ; a & « h a w n ' i n Figure 3.2.,The»network includes a 6-mile.section of
freeway J - 4 0 5 , a 3-mile section .-of
freeway'I^^'Si-mjle
section o f freeway SR-l j 33-*and
the adjacent surface streets:* T h i s n e t w o r k u s calibrated torinvestigate.the effectiveness o f
various Intelligent Transportation Systems (ITS) strategies on relieving traffic congestion
happened along the n o r t h b o u n d 1-405 in the m o r n i n g peak periods.
»" ' *J * ~"i * J.
'
, .
6,
'
.fl
I
;*r>
1-405
i a
i
»
Culver
.*"
t*
',.
'*
"•/*
a
"V i t ) . »
r y / V j •Bar
"
U'"'" -^L A
/ ^ ^
f
: 3 > X j#, ^ S ^ / ^ v " " ^ ^'M^V'^V
M
•JeBery^ ' ^
^ r % Q T a T j N 7 ^i\fcj^fifl_''
i '
i, *~~.-~.1— ^ n ^ j K i
C. rt^V jAflon
i-lt
J "• /
* «• . V .
\ ? ^-'f J.S
* - , / tR-133
?£b Jl?
'i
,5
IrvfeW CenterDr*
i . i..
1-5
Figure 3.2 Overview o f the study n e t w o r k
3.3.2 Preparation of Calibration D a t a
Microscopic simulatidn ' m o d e l s h a v e very c o m p l e x data requirements and n u m e r o u s
model'parameters. T h e niofe'data that'can-be collected and used for Calibration, the better
the calibration'Can'be.
T h e following data, including basic input data of the simulation and observed data for
calibration / validation p u r p o s e are prepared.
1) Vehicle characteristics and performance data
These data include vehicle length, m a x i m u m speed, m a x i m u m acceleration and
deceleration rates, etc., w h i c h are obtained from California D e p a r t m e n t of Transportation
(Caltrans).
2) Vehicle mix b y type
23
V e h i c l e composition b y type is determined b y the statistical analysis of traffic flow data
observed from surveillance videos at two freeway locations in t h e n e t w o r k /
3) Arterial v o l u m e d a t a
W e obtained 15-minute interval traffic counts at all important cordon points of the
network. S o m e of t h e s e data w e r e from the City o f J r v i n e , collected in January 2002 and
J u n e 2 0 0 1 . O t h e r s w e r e derived based- on t h e s u r v e i l l a n c e video - data, .video-taped
b e t w e e n M a r c h 27, 2 0 0 2 and April 19, 2002. T h e d a t a .from the City of-Irvine also
includes traffic count d a t a at/important links inside t h e network.
4 ) Travel t i m e data
W e obtained floating car data of northbound and southbound freeway 1-405 collected at
Oct. 17 and Oct. 18 o f 2 0 0 1 from Caltrans.
5) F r e e w a y loop detector data
W e directly access mainline, on-ramp and off-ramp l o o p detector data from an on-line
database at the University of California, Irvine.
**"
3.3.3 Calibration D a t a R e d u c t i o n
B e c a u s e field observatioris\vary from day to d a y due, to the stochastic nature o f traffic,
o u r calibration objective is "to' re-construct the typical real-world traffic variation in
simulation. W e selected o n e d a y ' s data for the calibration process.
t.
T h e m ethod w e e m p l o y e d i n t h i s s election i s t o c o m p a r e t h e p eak-hour (i.e. 7 -8 A M )
v o l u m e of a candidate day at any selected loop station w i t h the average p e a k - h o u r
v o l u m e of all candidate days u s i n g the G E H statistic, used b y British engineers [10]:
GEH =
(Vol(0~ave_Vol)2
*(Vol(i) +
ave_Vol)/2
(3.4)
In o u r study, if the G E H values for m o r e than 8 5 % of the selected loop stations are less
than 5, the demand, pattern-,of the ^candidate day is typical. There are 3 5 selected,. loop
stations, placed at the.npstre.am end of each freeway, all o n - r a m p s ano! all pff-ramps. This
study showed that the d e m a n d pattern at Oct. 17, 2001 is typical based on t all w e e k d a y s '
data in October. Therefore, the travel time and loop data of Oct. 17 were chose for the
calibration study, t
ft
3.4. C A L I B R A T I O N
3.4.1 Basic D a t a I n p u t / N e t w o r k Coding
(•
W e built the study n e t w o r k in P A R A M I C S based on aerial p h o t o s and road geometry and
infrastructure m a p s obtained from Caltrans and the city of Irvine. The. simulated .network
h a s the same configuration of loop detector stations as those in the real world and the
24
same traffic. controL operations* including actuated .signal control and t i m e - b a s e d - r a m p
metering, m o d e l e d b y full-actuated signal and r a m p m e t e r i n g plugins-, respectively [11].
T h e zone structure o f t h e network is based on data from the O C T A M model.
, •* *
'
'
T h e basic input data also include vehicle m i x b y type, vehicle characteristics and
performance .data? a n d some;driving restrictions. S i n c c . P A R A M I C S regards,each* vehicle
-in ther^simulatidn as tsc Driver -Vehicle i .Unit (DVU),- 'driver" jdata, r e p r e s e n t e d b y
aggressiveness*iand. awareness" factors^ are Jalso inputs o £ simulation. For this 1 study, w e
u s e d thendefault'distributionsjof these t w o factors.,) if
3.4.2 Calibration o f Driving'Behavior M o d e l s *
'
*»
x
T h e driving behavior m o d e l s of P A R A M I C S have*been extensively studied.[4,-5, 6]i Lee
et al. [5] conducted a calibration study based on a sub-network of this s t u d y network,
-which shows calibrated v a l u e s , o f i h e two^major parameters*6f driving.behavior m o d e l s ,
i.e. the m e a n target h e a d w a y and driver reaction time, are 0.625 and 0.415 respectively.
•These two v a l u e s m a y be'£hanged in the-parameter fine-tuning step, in order t o ' m a t c h the
•observed congestion patterns'.
, ">
6 . 4 . S C a l i b r a t i o n of R o u t e Ghoice'Model;
© u e ' f o . the-existence o f freeways and parallel streets 'in\the s t u d y network, *the routing
algorithm adopted i n the simulation is -important.; W e . calibrated .the n e t w o r k under
s t o c h a s t i c ' a s s i g n m e n t . 'Stochastic 'assignment i n - P A R A M I C S ' ^ a s s u m e s , that different
drivers perceive different costs from -a', decision n o d e to the destination. T h e perceived
cost is calculated based on the given perturbation factor w i t h a r a n d o m n u m b e r assigned
to the.vehicle, .and the'shortest perceived route is-cnosen a t the decision node.
Since-we- h a v c . n o data to calibrate.perturbatibn factors,- w e take a value o f 5 % for all
driVers'based on the-assumption that most drivers in t h e m o r n i n g . p e a k are familiar drivers
who-have^a good k n o w l e d g e , of the road n e t w o r k , and traffic condition. In addition, the
"familiarity" attribute 'affects t h e route ehoic6, behaviors -in P A R A M I C S . Since w e
calibrated the n e t w o r k using the morning p e a k d e m a n d , when- m o s t travelers are
commuters, w e assumed that 9 5 % of drivers are familiar drivers, w h o c a n choose from
among both'arterials and secondary streets.
3.4.4 O D E s t i m a t i o n
3.4.4.1 Reference.OD matrix
A static origin and 'destination (OD) d e m a n d matrix is sub-extracted from the O r a n g e
County Transportation Authority Model ( O C T A M ) 2 0 0 0 model. It is used as the
reference O D matrix o f this study.
T h e reference O D matrix is evenly loaded for the w h o l e simulation.perjod (subject to .a
flat demand "profile"). T h e vehicles are observed as vehicles m o v e through tne network.
25
A b n o r m a l behaviors always correspond to n e t w o r k coding errors, w h i c h need to b e
identified and solved.
3.4.4.2 Modification o f route choices
Based on- the calibrated route choice m o d e l (i.e. stochastic assignment), w e need to
further fine-tune s o m e local parameters, such as link costs*-in order to^have a reasonable
resulting routing, w h i c h c a n b'e based on. survey data. Since travel .delays caused b y
intersection signals and freeway ramp control are not considered for traffic; assignment in
P A R A M I C S , w e a d d e d tolls to o n - r a m p links to reflect o n - r a m p control, and decreased
speed limit values o f arterial links in order to 'reflect ssignal control.
t
3.4.4.3 Fine-tuning the total O D matrix
T h e reference O D matrix obtained from the O G T A M m o d e l needs to b e adjusted for t w o
reasons:
>
t
• (1) It is for the m o r n i n g p e a k hours from J6 J o 9. H o w e v e r , the congestion.in the study
network cannot b e totally cleared at 9 o ' c l o c k . Consequently^ the O D d e m a n d
matrix needs to b e further expanded to 4 hours, i.e. from 6 to 10;
(2) It is not accurate because the data sets of O C T A M n i d d e l are generally limited to
t h e nearest decennial c e n s u s year a n d t h e sub-extracted O D matrix is based o n t h e
four-step m o d e l o f T R A N P L A N . A s a r e s u l t , w e n eed t o adjust t h e w h o l e O D
matrix based o n the-reference O D , tfxe'assumed-traffic a s s i g n m e n t - m e t h o d a u d i t s
resulting route choice. T i u V i s a static OD-estimation problem,-which h a s . m a n y
solution m e t h o d s . T h e least square m e t h o d i s mo'st-frequently used [12,1-3].
.
J
-if''
i
>r
Since w e h a v e 15-minute interval traffic c o u n t s ' a t all cordon points of. the network, the
total traffic attractions and generations o f each z o n e are k n o w n . W e assumed the same
trip distribution as that t>f the reference O D m a t r i x e s applied to all z o n e s i n the adjusted
O D matrix. T h e F l J R N E S S technique is=then-used for balancing the adjusted O D table. If
the total ^attractions are n o t equal to-the .total generations, the-total generations are used! as
t h e total: For Ihe-'following steps o f ' O D modification, the-total origin and destination
d e m a n d s will b e basic constraints.
" i
i
t *'
\
,
i
W e evenly load the adjusted O D matrix for the w h o l e simulation period (subject Jo-a flat
d e m a n d '^profile"). B a s e d on the simulation results, w e can c o m p a r e the observed a n d
simulated total traffic counts at selected measurement locationsrrwith the 'objective
function s h o w n in Equation 3.1. In this study network, there are 52 selected measurement
locations, including 13 mainline loop stations, 29 on-ramp loop'stations, 1 a n d 10 arterial
links. T h e measure o f t h e overall quality o f the O D estimation is the G E H statistic:
I,
i.
'
f
.
U
T
^
I f t h e G E H values for m o r e than 85%"of the measurement locations are-less than 5, the
l
adjusted O D is acceptable.
' i J'
J ' • 1 ''
26
A n iteration p r o c e s s is required in order to obtain a satisfactory total O D matrix. B a s e d
on a simulation run and its resulting GEH'values'at^measurement'Ib'c.atioris, w e can
further adjust the complete O D matrix according to assumption of the proportional
assignment [14], w h i c h assumes t h a t the link volumes are proportional to the O D flows.
T h e modifications t td Vehicle routes ' m a y also n e e d ' ' t o be^ i n v o l v e ^ to generate an
a d V e p t a b l e ^ h o l e O D matrix. '
*
" *
"• " '
»t i
B a s e d ' o n multiple Iterations, a good and acceptable total O D ' c a n , b e obtained. Table 1 3.1
.(left side) shows the calibration results at this step. It shows tKat; except* for a single onr a m p Ideation anil o n e arterial' link location, "k\\ o t h e r m e a s i i r e m e n t locations h a v e a G E H
value" lower than 5; which'satisfies the calibration acceptance criteria o f this step.
3.4.4.4 Reconstruction o f time-dependent O D d e m a n d s
T h e objective o f this step is to assign the total O D to a series o f consecutive t i m e slices.
Otir Tne'thod tries* 'to simplify I the'"c6mplex' tunfe-dependent O D estimation problem
through reconstructing & e d y n a m i c ' O D ' d e m a n d s - ' b a i e d ' o n ' a ' s e t o f * d e m a n d profiles.
P A R A M I C S has an enhanced feature o f d e m a n d loading, i.e. the^ ability to specify
*different"*demand profiles'for e a b n O D pair. : Thre-ugn t h e ' u s e o f " m a u H x " and "profile"
files* "a'profile c & r b e gpecifiiid f o r a specific OD'pair. Since the 16-mmute interval*traffic
counts at all cordon points of the network are known, the pro'flle o f Vehicle generation
from any origin z o n e and that of vehicle attraction to any destination zones are thus
known.
W e further assume a n u m b e r o f i nitial d e m a n d profiles f o r a 11 O D p airs b ased o n t h e
fonowing>criteria:
i(l),T)ie f jdemand profile from a n arterial origin z o n e to a n y arterial destination z o n e
has.Jhe.same profile, .which is the s a m e as the vehicle generation profile from this
origin zone;
(2) T h e d e m a n d profiles fro;n a . freeway ..origin, zone to a freeway d e s t i n a t i o n zone,
from,a freeway origin z q n e to an arterial destination,zone, fromran arterial .origin
z o n e e t o . a freeway destination z o n e will ,be bajsed^n the v tra/fic count profile at
corresponding, loop, stations placed at freeway mainline, off-ramp, and bn-ramp,
jTespectiyely.
Based ori.these criteria, w e will furjher. find the d e m a n d profile for e a c h O D pair.
A s wp know, trie O D estimation process is related tp, the other calibration process.
Without me,paIibration.of other c o m p o n e n t s of the simulation m o 4 e l , [the d y n a m i c O D
d e m a n d s are almosl i m p o s s i b l e to b e obtained because the traffic during p e a k h o u r s
involves the capacity o f the network, w h i c h is what the calibration needs to find out.
A s a result, this step has two calibration objective ^functions. The,first o n e is an easy one,
which is to m i n i m i z e ,the deviation b e t w e e n the observed <and corresponding simulated
traffic counts at selected measurement- locations, for .tjie peak h o u r o f the simulation
period:
27
^(VOLobs(n,peak_T)-VOLsim(«,peak_T)):
min
(3.6)
rt-O.
w h e r e A^ is t h e total n u m b e r o f m e a s u r e m e n t locations; VOLobs(i, peak T) and VOLsim(i,
peak_f)
are total o b s e r v e d and simulated traffic counts for the p e a k Jiour at measurement
location i9 respectively. T h e selected m e a s u r e m e n t points are the s a m e as those in last
step. T h e p e a k h o u r is defined as from 7 to 8 A M . T h e following criteria are required to
b e satisfied for this objective:
•
ThQ-modeled p e a k h o u r v o l u m e s at measurement locations m u s t be within l S
percent o f the observed vofumes for flows greater tfcan 700 vphpl, o r within 100
v p h for flows less than 700 v p h . These targets m u s t b e satisfied for 85 percent of
the cases;
•
Total screenline flows (normally > 5 links) to be within five percent for nearly all
screenlines;
T h e G £ H statistic to be .less than five for -individual flows f o t . 8 5 percent of the
cases, and less, t h a n four for screenline totals for nearly all screenlines;
•
T h e second objective function is to m i n i m i z e the deviation, betwpen the observed and
corresponding simulated traffic counts at' selected measurement locations at
five-minute
interval. It c a n b e formulate as:
T N
m™
YYiVOLeln{n,t)-VOLalm(n,Qy
(3.7)
M n=\
w h e r e N and T are t h e n u m b e r o f measurement locations and t i m e periods, respectively;
VOLobs(h, tXand VOLsim(n, t) are observed a n d simufated trafficcounts of time period 1 t at
m e a s u r e m e n t location I, respectively. T h e length o f each p e r i o d i s 5^minutes m this study.
T h i s step l of calibration is an iterative process. W e m a i n l y modify t h e d e m a n d profiles
from'a* freeway origin z o n e ' t o a freeway clestina'tibh zone, frorrr^a freeway origin z o n e to
an arterial 'destination zone, and from afi arterial'ori^in'zorieto a-freeway destination zone
in order to m a t c h the traffic counts-at selected measurement locations. T h e trial-and-error
m e t h o d is used t for the modification of d e m a n d profiles based on t h e following criteria:
(1) T h e pr6file~rrbm a freeway origin zone to an arterial 'destination zone can b e
estimated, b a s e d o n the 15-minute loop data at a corresponding off-ramp location.
(2) T h e profile from an arterial origin zone t o a' freeway destination z o n e -can b e
'estimated b a s e d on the 15-mihute 1 loop data at a'corresponding on-famp location.
( 3 ) ' T h e profiles from freewa^'origiri zones to' freeway1 "destination z o n e s ' a r e decided
J
last!'
'
'
'*
"*•>J'
•
Traffic count .calibration h e r e ' i s ' a n initial m a t c h o f v o l u m e ' d a t a ; v o l u m e calibraHorf will
b e fine-tuned 1 'in next s t e p / T h e calibration results o f this step a r e - s h o w n in Table 3.1
(right side), w h i c h s h o w s t h e comparison of traffic counts of p e a k h o u r at those selected
m e a s u r e m e n t locations.
28
Table 3.1 Traffic counts calibration results o f the total A M peak-period and*the peak^hour
Peak Hour (7-8 AM)
AM Peak Period (6-10 AM)
Simulated. ,% diff GEH Observed Simulated %,diff .GEH
Mainline detectors *- ««% J * -Observed
24505
0%
0% {f.06
24428
0.49
405n0.93ml
6^0,3. ,
,. 6808
v
J
-1%' \%f ' 33274 ° 32646
-2%
9127'" 1
9006
3.46
405n3.31ml
"
(
w 8^22- ''
-2%
29890
4.02
495^3:86™^
'PJ
8248~'<jI * - w ,-o:8i ' ^30589"
:-2% ' -U3
34277- j 33475
-2%
9545? i 0 937Z, i
4.36
405n5.74mli *
i
' '
8
5
7960 on
.
28255
279,04
-1%
2.09
405s6.21ml
1?
*b
>W*
8098 . « • 8 0 1 0 r
-1% t 0.98
28501
27795
-2%
4.21
40qs3.31pl
1
'
5514 (
405s6.77ml
5583'
19638
-2%
2.97
-1% ' tf.93 "2d057
j
2% &75 ' '26830
26614
-1%
1.32
7686
5ri22.2mF' '
'
- 7&P
6499 „ + , 6974
'7% i 5.79-' •24464
-2%
2.82
5s22.14ml f
*
24025
4
133n9.37ml
-8%, 1.76 - 1496
1498 -i T,0%
0.05
7t
' Slfllj'
133n10.05ml
,
804
817
2% 0.46
2534
2607
3%
1.44
'*-3% ** 1.50 11 §557
0%*
2752
2674
85571
0.00
133s10.05mf ,,
*' J
-6% 2.61
52331'
5429
4%
133s9.37rnf' ' *v r
"1760*""
1652 ^
2.68
v
Rsmi^ Defectors
1
1% 0.16
546
56^4
3% .0.76
4Q5i]0i93fr_ . (
,160
M162,
405n0.93orb
» . 512
507
,-1% 0.22
1815
1760
-3%
1.30
,f
' 'Hio
'35% 3.43
445
0%
0.09
149*
447 '
405nffilort>
l !
54
M% o.2r
'213
197
-8%'
56
1.12
405nf.73ffs
*'
2227
2166
-3% .1.30
6887 *~-~6987
1%
1.20
405M.93ft
*!*
165
196
19% 2.31
726
705
0.79
405n2.99fr
(-3%
405n2.99orb
436
442
1% 0.29
1418
1358
'-4%
1.61
3% 0.82
2737
2704
0.63
405n3.86fr
709
731
-1%
4% 0.73
*931*
3%
405n3.86orb
*
" '
307320
963'
1.04
816
^1% 0.25
2889
2686
-7%
3.84
405n4.03orb
809
460
426
-7% 1.62
1626
1659
2%
0.81
405n5.55fr
-2% 0.46' 2161
2134
-1%
0.58
405n5.55orb
682
670
405n5.74orb
1026
1075
5% 1.51
3567
3576
0%
0.15
12% '•3.52 1 3182'
3139
-1%
0.76
40*5s5.69fr
853'
959
-13> 2.32 , 983
921
-6%
2.01
4*05s5.69orb'
316
276
4p5s5.5orb
241 ,
281 , .t „<17% 2.48
9,40
914
-3%
0.85
405s4.03fr
409
392
-4% 0.85
1602
1554
-3%
1.21
16% 2:06 ' 647
3%
664
0.66
405s4.03orb
183
212
-10% :4.64
624
567
-9W 2.34 0 2112'
1904
405s3.84farb
864
- 817
-5% 1.62- 2937
2743
-7%
3.64
405s2.88fr
405s2.88orb
152
159
5% 0.56
468
505
8%
1.68
592
573
-3% 0.79
1881
1953
4%
1.64
405s 1.58ff
70
117
67% 4.86
315
319
1%
0.22
405s1.57ff
-3% 1.28
4906
4907
0%
0.01
405s0.96fr
* 1546
1496
405s0.96drb
'20
65% 2.53
58
123
112% 6.83
33
11
22% 0.63
43
43
0%
0.00
405s0.77ort)
9
742
802
8% 2.16
2443
2600
6%
3.13
5n22.1fr
84
94
12% 1.06
289
339
17%
2.82
5n22.1orb
199
232 >
.17% , 2.25
752
735"
-2%
0.62
5n22.2orb
Arterial Detectors 6563
2119
-7% 3.45
6317
-4%
3.07
Jeffery 405-Alton
1963
1
882
1057
20% 5.62 ' 3520
3505
0%
0.25
Alton E of Jeffery
**
758
604
-20% 5.90
1987
2038
3%
1.14
439
446
2% 0.33
1470
%1386
-6%
2.22
624
-29% 7.84
1675
1480
-12% 4.91
Alton E of Sand
443
729
777
7% 1.75
2443
2469
1%
0.52
804
619
-23% 6.94
2102
2382
13%
5.91
Alton E of Laguna
491
606
23% 4.91
1714
1921
12%
4.86
-2% 0.39
1287
-4%
Barranca SR133-ICD
428
420
1240
1.32
959
962
0% 0.10
3235
3161
-2%
1.31
29
3.4-5 M o d e l Fine-tuning
T h i s step fine-tunes v a r i o u s p a r a m e t e r s "in order to- re-construct traffic variations and
m a t c h the congestion pattern o f the study network. These, parameters include:
*
(1) Link specific parameters, including the signposting setting or the target h e a d w a y
o f those links at critical bottleneck locations w h e r e a very_ m i n o r change in
capacity can h a v e a<major effect on congestion.
(2) Global p a r a m e t e r s for ^he car-following and lane-changing models, i.e., the m e a n
target h e a d w a y and driver reaction time. T h e y are two k e y user-specified
parameters in< t h e car-following and lane-charrging m o d e l s that can drastically
influence overall driver behaviors o f the simulation*.
(3) D e m a n d profiles from freeway o r i ^ r i zones to freeway destination zones m a y
need to b e further modified, in order to adapt traffic congestion along freeways.
T h e objective function o f this step is to m i n i m i z e the deviation between the observed arid
t h e corresponding simulated 5 m i n v o l u m e and point-to-point travel time measurements. It
is a two-objective o p t i m i z a t i o n process, w h o s e formulations are shown in Equation 3.2
and 3. B a s e d ' o n travel t i m e matching, the 5-min traffic counts at measurement points*are
further matched.
In o u r study, the point-to-point travel time matching w a s performed only for the
northbound and s o u t h b o u n d freeway 1-405 between the interchanges at Irvine "Center
D r i v e and Culver D r i v e d u e to the lack of data for other trips.
'
B e c a u s e of the high traffic d e m a n d s during the p e a k hour, and recurrent congestion along
the northbound 1-405, s o m e network coding p r o b l e m s ' ' m a y show up and need td^tfe
corrected. Congestion a n d queuing p h e n o m e n a o n the northbound 1-405 m a y take extra
effort to modify d e m a n d profiles of s o m e specific OD' pairs. This step m a y involve
multiple simulation* r u n s in order to determine a g o o d combination o f rthese
aforementioned p a r a m e t e r s . T h e trial-and-error m e t h o d is used for parameter
modification.
T h e final calibrated m e a n ' target h e a d w a y and driver reaction time are 0.78 and 0.66,
respectively. Figure 3.3 s h o w s the calibrated-demand profiles for several major O D pairs.
3.5. O V E R A L L M O D E L V A L I D A T I O N .
*
T h e final m o d e l validation requires^ multiple simulation runs because of the stochastic
nature of microscopic simulations; T h e m e t h o d to determine the number- o f runs^is
described in Section 3.5.1.
, r j
3.5.1 Determination of N u m b e r of Simulation R u n s
30
-Microscopic* simulation* is' a-Jgenerally stochastic sprocess, w h i c h rely u p o n r a n d o m
numbers to-release Vehicles, select 'vehicle type* select* theiF destination and their> route,
and to determine t h q h x ' b e h a v i o r as they m o v e through -the network. Therefore, the
-average results o £ several 1 simulation runs-'Using: different seed n u m b e r c a n reflect the
traffic condition o f a specific"scenario.
12%
•o
c
«
£
o
•o
«
9%
Z
o
6%
<D
o>
a
c 3% -!
a>
a
0%
6:00
6:30
7:00
7:30
8:00
8:30
9:00
9:3"0"
- a freeway zone to a freeway zone —•— an arterial zone to an industrial zone
• a freeway zone to an arterial zone —X— a/i artertial zone to a freeway zone
Figure 3.3 Demand-profiles for m a j o r O D pairs
is
In order to determine the n u m b e r of simulation m o d e l runs, w e need to k n o w the variance
of a n u m b e r of performance measures from simulation results, w h i c h are u n k n o w n before
simulations T h e flow chart to determine the n u m b e r of simulation runs is s h o w n in F i g u r e
3.4.
W e execute nine simulation runs first and then calculate the n u m b e r o f runs needed
according to the m e a n and standard deviation of a performance m e a s u r e o f these nine
runs:
N = {tan
-)•
ft • £
(3.8)
where n and 5 are t h e m e a n and standard deviation of the performance m e a s u r e based on
the already conducted simulation runs; £ is the allowable error specified as a'fraction of
the rnean p.; t ^ is the critical value of the't-distribution'at'the confidence interval of a .
This calculation n e e d s to be done for all performance m e a s u r e s of interest. T h e highest
value f r o m v ariances i s the required n u m b e r o f runs. If,the' current n u m b e r o f r u n s j s
already'larger than this valufe, the simulation of this scenario is ended. Otherwise, o n e
additional run is performed and then the required n u m b e r of runs needs to be recalculated.
3.5.2 Validation Results
31
F o r o u r case, the p e r f o r m a n c e m e a s u r e s w e u s e are.the total vehicle hour traveled and the
northbound point-to-point travel' time (i.e. from I C D to Culver). T h e total n u m b e r of
simulation runs is 3 1 in order to achieve statistically meaningful performance measures.
T h e m e a s u r e o f g o o d n e s s of fit w e used for evaluating t h e calibrated simulation m o d e l is
t h e m e a n abstract p e r c e n t a g e error ( M A P E ) , w h i c h can b e calculated by:
«•
(3.9)
MAPE = 1 £ W*> (0 " Msim (0) / Mobs (/))
1
r=t
Start
Original nine runs
1'
Calculating the mean^and its std
o f each performance m e a s u r e
V. '
Calculating t h e required # o f runs
for each performance m e a s u r e
Additional o n e
simulation run
j
Is curreait # o f
runs enough?
N
Y
Figure 3.4 F l o w chart o f the determination of n u m b e r o f simulation runs
W e compared the simulation results w i t h the loop data and'the floating car data o f Oct. 17,
2001. Figure 3.5 shows,.the comparison o f observed arid simulated 5-mihute traffic'counts
.at eight major freeway m e a s u r e m e n t locations. T h e M A P E error of traffic'counts at these
m e a s u r e m e n t locations r a n g e frpm 5^8% to 8.7%. T h e travel, t i m e calibration results are
s h o w n in Table 3.2. Figure 3.6 and 3.7 s h o w the comparison o f observed and simulated
point-to-point travel,time for the.northboupd and -the sou'tnbound 1-405", w h i c h have the
M A P E errors o f 8 . 5 % and 3.1%, respectively.
32
In summary, simulated traffic counts and point-to-point travel t i m e data correspond well
to the observed measurements. T h e calibrated simulation, m o d e l accurately captures the
congestion natterns of t h e target netwo'fk s h o w n oh Oct. 1 7 , 2 0 0 1 7
J±
900
700*
j
c
300
6:00
^
W
7:00'
*
^
8:00*
9:00
10:0C
6:00
•*-=-405N0.93rhl-sim — 405N0.93ml-obs
7:00
8:00
9:00
10:0C
•405N1.93ff-sim —— 405N1.93ff-real
900
300
6:00-
-1 T
7:00
8:00
• N3.04ml-sim
300 4
6:00 **
7:00
7:06
10:00!
•N3.04ml-obs
8:00
9:00
10:0C
-6:00
8:00
• 5n22.2ml-sim
9:00
10:0C
•5n22.2ml-real
7:00
8:00
9:00
10:0C
•405N3.86ml-sim —— 405N3.86ml-obs
6:00
•405N5.55ml-obs
•405N5.55ml-sim
6:00
9:00
7;00
8:00
-405s3.31-sim
6:00
7:00
•133s9.37ml-sim
9:00
10:0C
-405s3.31-obs
9:00
10:OC
•133s9.37ml-real
Figure 3.5 Traffic counts calibration (5-minute volume) at major freeway m e a s u r e m e n t
locations
33
Table 3.2 Travel time calibrations
v **; t, tV;* ;?j % «fl. *ur ^ ? ^
.•***••
Arrival
Arrival
Mainline Trip Analysis
Start time
Time
Observed Start time
time
Southbound 1405fromCulver to
ICD
6:00:22
6:04:38
256
6:00:00
6:15:00
6:25:14
6:29:36
262
6:25:00
6:30:00
6:47:01
6:51:17
6:45:00
6:50:00
256
7:06:34
7:10:56
262
7:05:00
7:10:00
7:24:45
7:28:54
249,
7:25:00
7:30:00
7:45:00
7:50:00
7:46:23
7:50:48
265
8:05:14
8:09:41
267
8:05:00
8:10:00
8:24:23
8:28:44
261
8:25:00
8:30;00
8:43:42
8:47:47
245
8:45:00
8:50:00
9:04:27
9:08:34
9:05:00
9:10:00
247
MAPE
Northbound 1405fromICD to
Culver
6:00:58
6:04:45
227
6:00:00
6:05:00
6:19:32
6:23:40
6:20:00
6:25:00
248
6:40:51
6:44:50
239
6:40:00
6:45:00
7:00:58
7:05:05
247
7:00:0/)
7;05:00
7:23:06
7:27:57
291
7:25:00
7:30:00
7:40:53
7:49:29
514
7:45:00
7:50:00
7:57:57
8:05:58
481
8:00:00
8:05:00
8:22:06
8:27:59
353
8:25:00- 8:30:00
8:40:27
8:44:25
238
8:40:00
8:45:00
8:59:57
9:04:03
246
9:00:00
9:05:00
MAPE
Travel time
*c
•*.
t •* -
simulated % diff
264.5
7.0%
257.8
3.3%
255.7 , 5.4%
259.6
1.7%
263.1
5.9%
278.9
1.1%
326.8 .- 0.3%
262.6
0.6%
259.5
2.1%
246.4
3.2%
3.1%
247.7
248.3
252.2
294.2
325.1
504.4
505.1
390.4'
281.6
256.0
9.1%
0.1%
5.5%
19.1%
11.7%
1.9%
5.0%
10.6%
18.3%
4.1%
8.5%
T \
"S-400 o
M
a>
•
> 200
L.
I-
6 00
-
6:30
7:00
7:30
8:00
8:30 . 9:00 *$:30
* v —— simulatioo -^observation
10: DC
i
Figure 3.6 O b s e r v e d and"simulated travel time of northbound 1-405
34
;<
~r~~i ;
* r • ' n<* *fii
/"
TTT*^
i .» • v
i
,
/
f ,0
. ,' "J?
rt
,6:00
r
- 1 li)l
6:30, 7:00
•* * 0 7~J"
'.'
7.-30„ 8:00
,,8:30
9:00
Un
9:30
10:00
- ^ sirhulatibrt-^-*-*-' observation
.c
i
)y r ~» F i g u r ^ 3 . 7 Observeci and simulate^,travel time p f southI?pund J-405
**
3-J6.. COmV&WQ
REMARKS
/
" - r
*
This chapter proposes a calibration a n d validation p r o c e d u r e for microscopic, simulation
' m o d e l s . ' I f t ^ e j j r e x z o u s studies-focused mostly ojijdriyjng .behavior m o d e l calibration t o
study a-sectipn g f freeway,. Jhis study p r o v i d e s a general s c h e m e of,mqdel. calibration and
validation for network-level simulation^ -responding tp^the extended u s e - o f microscopic
s i m u l a t i o n , mgdels, Such extension, -requires, m o r e systematic *apprpach in m o d e l
calibration since various, model-,cornppnents^ are i n c l u d e d * in- -the *proc,es,s. JJie* p r o p o s e d
procedure r is demonstrated via>a c a s e n e t w o r k s that,- involves / n u l t i p l e s t a g e s a n d t h e
calibrated-, model s h ^ w s reasonable * performance in replicating ;the .observed .flow
condition,
J/
tr
i- i
In this^cjiapter^vanptis" c o m p o n e n t s p/mq^ej&-were, addressed in-the m o d e l ^calibration
process; however, w e u s e d t h e default route choice m o d e l in P A R A M I C S b e c a u s e o f t h e
interaction .^etween v #ied:pute choice m o d e l a n d , O D estimation p r o b l e m . In the, n e t w o r k
Jevpl<"mpdel calibratjfin/yalidatiqn (process, the i ; ipter-rejationship- f between route choice
and O D estimation m a k e t h e p r o b l e m complicatechunlessf o n e o f 4hem is, externally
determined. This -wi]l ; b e o n e o f topics t& b e further studied in micros-simulation
calibration/validation process:
'Another further topic w o r t h y of study is-the-development ojf an, automated and systematic
topi *for microscopic simulation mode,l calibration/validation b y incorporating
optimization-based _model calibration m e t h o d s within t h e proposed multiple stage
approach.
3.7 R E F E R E N C E S
35
1. M . G. M c N a l l y , J - S . O h , "Technical M e m o r a n d u m on Calibration / Validation o f
Traffic M i c r o s i m u l a t i o n M o d e l s , " Research Report for Orange C o u n t y
Transportation Authority.(OCTA), D e c e m b e r 20Q2. +
2. J. Hourdakis, P. G . Michalopoulos, J. Kottommannil, " A practical procedure for
calibrating m i c r o s c o p i c traffic simulation m o d e l s , " 8 2 n d Annual Meeting Preprint
C D - R O M , Transportation Research Board, J a n u a r y 12-16, 2002^ Washington,
D.C.
3. R. L. C h e u , X . Jin, K. C. N g , Y . L. N g , and D . Srinivasan, "Calibration o f
F R E S I M for Singapore expressway using Genetic Algorithm*, Journal o f
Transportation Engineering, Vol. 124, N o . 6, 1998, pp. 526-535.
4. T . M a a n d B . A b d u l h a i , " G E N O S I M : A G e n e t i c A I g o r i t h m - b a s e d o p t i m i z a t i o n
approach and generic tool for the calibration o f traffic microscopic simulation
parameters^" 81st A n n u a l M e e t i n g Preprint'"(JD-RbM, Transportation Research
Board, J a n u a r y 13-17,- 2Q02, W e l l i n g t o n , D . C .
5. D - H Lee, X . Y a n g , and P. Chandrasekar, "Parameter calibration for P A R A M I C S
using Cjenetic Algorithm^'' 80uV ' A n n u a l - M e e t i n g 'Preprint
CD-ROM,
Transportation Research Board, January 7-11, 2001, Washington, D.C.
6. B. Abdulhai, J - B Sheu, a n d W . Recker, "Simulation o f I T S on the I r v i n e F O T
area using ' P a r a m i c s 1.5' scalable microscbpictrafiic*simulator:- Phase* I: m o d e l
calibration and validation," California P A T H Research Report, U C B - I T S - P R R 99-12, T999.
7. L. Chu, H . ' X . Liu, W . Recker, and H . M . Z h a n g / " P e r f o r m a f i c e Evaluating 'of
Adaptive R a m p M e t e r i n g Algorithms U s i n g 'Microscopic Traffic' Simulation
M o d e l , " accepted b y Journal o f Transportation Engineering.
8. Y. Gardes, A . D . M a y , J. Dahlgren, A. Skabardonis, " F r e e w a y Calibration and
Application o f t h e P A R A M I C S Model,"" 81st'Annual M e e t i n g Preprint C D - R O M ,
Transportation R e s e a r c h ' F o a r d , J a n u a r y 1 3 - 1 7 , 2 0 0 2 , Washington, D.'C.
9. M : B e n - A k i v a / ' A . -Davol, T. Toledo, H . N . Kbustopoulos, ''-'Calibration arid
evaluation o f M I T S I M L a b in Stockolm", 82nd A n n u a l Meeting Preprint C D R O M , Transportation Research Board, January 12-16, 2002, Washington, D . C .
101 U K H i g h w a y s A g e n c y , " t J K design rnanu'al fbr roads and bridge's," London, U K ,
1996.
- .
.)J-I I
• ,
11. H.X. Liu, L. Chii, W : Recker, "Paramics A P I -Development- Ddcument for
Actuated S i g n a l , H S i g n a l Coordination arid".Ramp-Control", California P A T H
workingpaper,UeB-ITS-TWP-2b01-ll. '
*
1
1
12. E. Cascetta, "Estimation of trip matrices 'from traffic counts and survey"'data: A
generalized least squares estimator," Transportation "ResV-B. Vol. 18 (4/5),' 1984,
p p 289-299.
' 1 3 . M . G . H . Bell, *The : e'stimation o f origin-destination rhatrices b y constrained
generalized 1 east square*s,'*Transportatibh R'esearCfi B . V of.25", N b . 1, 1*991[ p p
13-22-.
r
">
• * *•
,
'Li.
r .
*
14. P. Robillard, "Estimating the O - D matrix from observed link volumes," Trans.
Res. 9 s p p . l 2 3 - 1 2 8 , 1975.
15. E. C a s c e t t a , D . Inaudi, G. M a r q u i s , " D y n a m i c estimators o f Origin-Destination
matrices u s i n g traffic counts," Transportation Science,"' 'VdWSJ, *No.4°, 1994,
pp363-373.
36
16. K. Ashok, M . E . Ben-Akiva, "Alternative approaches for real-time estimation and
prediction o f time-dependent origin-destination*flows," Transportation 6 Science,
Vol. 34, N o . l , February, 2000.
'^ii
a,
K ! * w *i .
^0"
p -r
i'i -
i
1i
t »r*
jl K il l
•*
iV **
J. I * o . *•*
i i
t
i
« f'
U
J
r
r
'
i
m
? )
'1
I
J
'
i
J
37
Chapter 4 On-line
simulation
4.1 F R A M E W O R K O F O N - L I N E S I M U L A T I O N I N P A R A M I C S
T h e goal o f this sub-task of the project is to enhance the capabilities £>f the P A R A M I C S
simulation m o d e l t h r o u g h A P I p r o g r a m m i n g for t h e on-line simulation application. T h e
framework o f the on-line system to b e implemented can be illustrated in Figure 4.1. T h e
real-world loop detector data are inputs o f t h e system.
D a t a o f those loop detectors located at cordon points of the n e t w o r k are queried from the
database. T h e s e r a w d a t a are processed in o r d e r to obtain lane-based speed estimation and
aggregated volume, o c c u p a n c y data at the detector station. T h e m i n i m u m aggregation
c y c l e is equal to t h e t i m e interval o f l o o p detector data from the field, w h i c h is 3 0
s e c o n d s in California. A typical aggregation cycles is 5 minutes or 15 minutes.
Reference
O D pattern
Dynamic
O D estimation
Forecast
lead t i m e
Historical
Data
Traffic flow
prediction
D e m a n d loading
Paramics
simulation
l *
D a t a aggregation
Consistency check
2
Traffic data at
cordon points
L o o p data at
measurement points
L o o p data from Oracle database
at A T M S Testbed
Figure 4.1 F r a m e w o r k o f the implemented on-line system in P A R A M I C S
I f t h e s ystem i s w o r k i n g u n d e r p rediction m ode, t h e future t raffic c ondition a t e ordon
points o f the n e t w o r k will be predicted u s i n g the aggregated loop data of last several time
intervals. T h e K a l m a n filtering based traffic prediction is applied. A forecast lead time
c a n b e specified as a n input o f the prediction, w h i c h represent h o w long in the future the
traffic condition is predicted. If the system is working under the responsive mode, this
prediction process is ignored. T h e traffic flow data at cordon p o i n t s o f the n e t w o r k are
then output to the d y n a m i c O D estimation module, that performs the estimation of an O D
matrix based on the d a t a of the current time interval. T h e current d y n a m i c O D estimation
38
m o d u l e is a.'^imple method that e a r s o n l y .handle, a.freetvay network*. A n advanced
dynamic O D •estimation: method, iwhich may. n e e d s a reference d e m a n d pattern as its input,
can" be-inserted here for-the capability e n h a n c e m e n t s , o f the on-line simulation system.
Currently, there are. s o m e on-going projects focusingrori.this.study.r
}
. •'
«
'1
A f t e r t h e acquisition o f the O D matrix, t h e - d e m a n d l o a d i n g ' m o d u l e remploya releasing
vehicles j r o m its original' zone to* the network.„A composite m o d e l is' implemented in
order to release vehicles with a certain h e a d w a y distribution, i.e. shifted negative
exponential distribution u n d e r v e r y l o w traffic flow condition, n o r m a l distribution w i t h
the>mean;of a:xohstant h e a d w a y under xongested'traffic condition,, a n d the, combination
o f two distributions u n d e r o t h e r conditions. >
A s a result, P A R A M I C S is connected w i t h the real-world J o o p datatdirectly a n d ' e a n j h u s
on-line simulate traffic. S o m e d e m a n d errors m a y cause m o r e c o n g e s t e d q £ l e s s congested
traffic •condition in.t&e simulation. A consistency checking m o d u l e ^s-.used, to .keep the
simulation as similar as that in the real world. T h e real-world loop detector data at
m e a s u r e m e n t points q f i h e n e t w o r k a r e . i n y o l v e d ' i n this p r o c e s s to-detect .the difference
between the real w o r l d and the simulation. D u e to the current theoretical l i m i t a t i o n on
consistency checking, t h e current project leaves this topic for t h e future."'
- ' '
" u
T h e following s e c t i o n s o f this ; chapter will-talk about the details h o w w e implement this
on-line simulation system.
4.2 L O O P D E T E C T O R D A T A
PROCESSING
T h e objectives o f t h e p r o c e s s i n g o f r a w l o o p d e t e c t o r d a t a a r e t o o b t a i n : ( 1 ) t h e l a n e based speed estimation; (2) the aggregation o f v o l u m e and o c c u p a n c y data o f last several
t i m e intervals. These data will further b e u s e d to O D estimation and d e m a n d loading.
The; loop detector data ; sJor,ed a t t h e A T M S testbed,datal?ase : are obtained from the, F r o n t
End Processor (FEP) of d i s t r i c t 12 qf Caltrans. These data are.raw data an,d not processed
b y the A T M S system o f Caltrans.-A script language is used to p r o c e s s these data in order
to store them to the Oracle database. T h e s e data can b e queried for t h e research u s e inside
our local network.
A n example of the data w e query from a typical mainline loop detector station is:
05/22/2001 06:00:00, 1201203, 5, 5, 1, 10, 0, 1, 9,-0, 2, 13, 0, 1, 7, 0, 0, 0, 0
w h i c h corresponds to the format:
D A T E T I M E , V D S J D , # o f L A N E S , # of L O O P S , L A f l E _ l _ V O L , L A N E _ l _ O C C ,
LANE_1_STATUS,
LANE_2_VOL,
LANE_2_OCC,
LANE_2JSTATUS,
....,
LANE_n_VOL, LANE_n_OCC, LANE_n_STATUS
39
'tVDS__ID" represents vehicle detector station index. A-detector station c a n h a v e several
loop" detectors', each o f w h i c h covers o n e lane. "# o f L A N E S " representS'the<total n u m b e r
o f -lanes at the loop detector station. " # o f L O O P S " represents the total n u m b e r of
installed loop detectors at the station*. " L A N E _ 1 " represents the leftmost lane. T h e actual
o c c u p a n c y value o f a lane is equal to the L A N E I O C C / 9 0 0 because the scan rate of
loop- detectors is 3 0 ' H z and the time, interval o f these data is 30 second.
" L A N E _ 1 _ S T A T U S " represents the status of the data, w h i c h shows* " 0 " for good data
a n d " 1 " f o r b a d data.
*
T h e l o o p d etector data* f r o m t h e field m a y suffer f r o m . a l o t o f p r o b l e m s . T h e r e a s o n s
m i g h t b e the c o m m u n i c a t i o n , noises, and sensitivity o f loopsi T h e quality o f t h e data
cannot b e detected. T h e data processing m o d u l e has the following features:
(1) Analyzing the existence o f l o o p data
(2) Filtering.those d a t a w i t h p o o r quality
(3) Aggregating v o l u m e and o c c u p a n c y data-at a certain aggregation cycle, .typically,
5 -minutes or 15 m i n u t e s
^
(4) Estimating -the average lane-hased speed based o n aggregated .volume and
o c c u p a n c y data
T h e estimation of speed is based on the assumption o f an effective vehicle length. For
lane*i o f l o o p detector station k, the average^speed o f time interval t is defined as
(4.1)
v,u(0 = — - r *Skj
OkAO
where,
qk,i = traffic count
Okj = occupancy*
gkj = average "effective vehicle length
*
T h e ' a v e r a g e effective^ v e h i c l e ' l e n g t h "needs-to*be estimated'before the r o p e r a t i o n ' o f the
algorithfri. W e take" t h e default values of effective vehicle length's from the A T M S "system
of District 7 and'12 in durialgorithrnl T h e s e default'values^are: < '
*"
l
(1) Leftmost laneV ^ f e e t "
-»
• ''
*
(2) Middle lanes: 2 2 feet
(3) Rightmost lane: 2 5 feet
4.3 T R A F F I C F L O W
PREDICTION
If t h e system is w o r k i n g under prediction mode, data of those l o o p detectors" located' at
cordon points of the n e t w o r k are outputted to the traffic flow prediction m o d u l e for the
prediction b f the future, traffic condition based "on the aggregated loop data of last several
t i m e intervals! If the s y s t e m is w o r k i n g , under the" responsive, m o d e , this'prediction
J
f
process is bypassed.
*
'
40
A typical O D
O D together
(Ashok et-al?
cordon points
traffic flows.
estimation & prediction method combines.the estimation and prediction o f
using K a l m a n filtering and Generalized Least Square ( G L S ) approach
1996). T h e proposed m e t h o d h e r e i s - t o predict the future traffic flows at
o f n e t w o r k first and then estimate the O D matrix b*ased on these predicted
The'traffic "flow-'prediction involves the
stations of upstream o f m a i n l i n e freeway,
•previous time penods^of the-same-day.
'<
-/
.
h
"-prediction o f traffic counts at loop detector
on-ramps and off-ramps based on loop data o f
*J
•«
'
•
4.3.1 Introduction
A c c o r d i n g ' t o l o o p data, w e c a n only k n o w the traffic counts o f last several time intervals.
In order to reflect traffic counts of the current running t i m e interval (or, next t i m e
^interval), w e have to use^traffic flow.#rediction.,techniques. *A n u m b e r of traffic? fl6w
predictive models h a v e b e e n developed and proposed, including ,historic .profile
approaches (Shbaklo, S., B h a t , et al 1992, Kreer, J. B., 1975, Hoffmann, G. and J. Janko,
;1990, Jeffrey,'D. £F.,d987),-non-parametric r e g r e s s i o n (SeungjaeXe.eKeUaly 1998y D a v i s ,
G. Av and/Nihan,,N>iL.,U991), time-series (Mobrthy, G. K . -and RatcIffieT-B. G v 19&8),
^leurabnetworks (BaherA-bdulhai, e t a i ; 1998,-Jinsoo Y o u a n d - J s c h a n g h o ^ l 9 9 8 ) ^ K a I m a n
filtering jtYoung^-Ihn Lee,t C h a n Y o u n g -Choi* 1995), t r a f f i c simulation, a n d D y n a m i c
Traffic1 Assignment m o d e l s .
4.3.2 Kalman Filtering b a s e d prediction-method
*
The;Kalman filter, p r o p o s e d b y K a l m a n in. I 9 6 0 , provides an.efficient least square b a s e d
solution to the estimate p £ t h e state, vector x o f a discrete t i m e controlled process.^ K a l m a n
filtering has shown g o o d p e r f o r m a n c e in a lot o f real-time f applications. T h e K a l m a n
filtering based prediction m e t h o d is applied in this study.
T h e traffic flow at a detection station is the state variable for the K a l m a n filtering process.
W e can establish the state equation as follows:
xk = xk_{ + uk + wA_,
(4.2)
where x* is the traffic flow at time interval k. Wk is the state nois"6, which" has a n o r m a l
distribution with zero m e a n and a variance of Qk. Uk is the predicted traffic flow
increment based on the last several traffic flow data (Xk-n, Xk-i) using the linear regression
approach, which h a s the objective to fit a linear relationship:
xt-a
+ b-i '
(4.3)'
where i varies from 1 to n. a is the intercept o f the o f the line with the vertical axis and b
is the slope of the line. T h e least square solution for this regression problem is
41
n
n
»-£(^*M)-<LO-.<5>*-,)
M
(=1
(4.4)
»-(Z«2)-(Z**-i):
/-I
i=l
T h e value of b is actually the predicted c h a n g e o f traffic flow at the detector station UkLet Zk denotes the observation o f traffic flow at time interval k, w h i c h is obtained) from
t h e real-world loop detector. T h e m e a s u r e m e n t equation associated with the state variable
Xk is given by:
(4.5)
2* = *k + vk
w h e r e v*. denotes t h e m e a s u r e m e n t error, w h i c h has a n o r m a l distribution with zero m e a n
a n d a variance o f Rk'
i.
In m a n y applications, the state^noise c o v a r i a n c e Q and m e a s u r e m e n t noise c o v a r i a n c e R
are often a s s u m e d t o b e constants, which-are usually jdetermin&l.prior t o t h e operation o f
t h e filter. R is generally determined b a s e d ' o n off-line^sample measurements. H o w e v e r , Q
i s m o r e ^difficult to b e determined bedause t h e p r o c e s s state* is typically n o t bbservable.
T h e m e t h o d s described in Section 5.2.3 are used to the online estimation*o£R-and Q.. L
4.3.3 Solution to the K a l m a n filter based prediction)
Let xk and Pk denote a priori state estimation-'and its estimation variance a t time step k,
xk a n d , ^ d e n o t e t h e ^p'dsteriori'state e s t i m a t e a n d ' its' estimation covariance at t i m e step
k, arid Kk denotes ' K a l m a n gain. T h e solution* Jo th'e'above K a l m a n filter problem, is
s h o w n a s follows:
S t e p 1: Initialization
x0 = E[xQl
pQ
=E[(x0-x0)2]
(4.6)
Step 2: State propagation
t
xk = xk_x + uk
(4-7)
(4-8)
Step 3: K a l m a n gain calculation:
Kk=Pk[Pk+Rkyl
(4.9)
Step 4: State estimation
*k
=Xk+Kk[z*-*k]
(4.10)
42
Pk=Pk-KkPk
.
i
(4.11)
Step 5: State prediction
If there is only one-step ahead prediction, the predicted traffic flow is:
'Jt
'-5fti-= * * + " * + i
*
'
(4-12) •
where Uk+i is calculated based on Equation 4.4. T h e prediction variance is:
Jt
t
?»Mt.ft
^
(4-13)
If the prediction is for several time intervals ahead, t h e predicted traffic flow will b e used
as the observation for a re-iteration prediction p r o c e s s (i.e. Step 5, Step 3, and Step 4).
4.4 O D E S T I M A T I O N
MODEL
Traffic xounts-.at.alLcordoncpbints, of the^ s t u d y n e t w o r k are n e e d e d for-(3D estimation.
Thesetcordon points-include the-upstream end of freeway, d o w n s t r e a m end of freeway,
all on-ramps and all off-ramps.
4.4.1 Volume conservation
T h e freeway system h a s the following input flows:
i (1) traffic flow at the upstream end o f freeway
(2) traffic flow at eacji r a m p
Since there are correspondent loops located at o n - r a m p s and the upstream end of
the sum of entrance traffic counts is:
In_Flow,(t) = Up_Flow(t) + > #amp_,Flow(i,t)
freeway,
(4.13)
where i is ;the index o f r a m p s , In_Flqw(t) is the traffic count o f t i m e interval / at the
upstream end of freeway, Ramp_Flow(i, t) is the traffic count of t i m e interval t on r a m p /.
If there is no congestion at the freeway origin locations, In_flow(t) is the d e m a n d entering
the freeway section.
T h e system has the following outflows:
(1) traffic flow at each,off-ramp
(2), traffic flow.at the downstream end of freeway
Since there are correspondent l o o p s located at off-ramps a n d the d o w n s t r e a m end of
freeway, the sum of exit traffic counts is:
Out_Flow(t)
= Down_Flow(t) + ^Offramp
_Flow(i,t)
(4.14)
43
rrr
T h e principle o f the t e c h n i q u e o f O D estimation is:
fn_FIow(t) = Out_Flow(t)
(4.15)
A s s u m i n g the error caused b y loop detector detection can be ignored, this formula is true
if the traffic is stable. U n d e r this condition, w e can further estimate each element in the
O D table through distributing off-ramp traffic t o upstream origins/zones.
4.4.2 M o d e l for distributing off-ramp traffic to upstream zones
T h i s m o d e l is originally
proportionality s c h e m e .
from
FREQ
model,
w h i c h is based
O,
ODtj=Dj.
on
the
intuitive
(4.16)
2>ieA
where A
upstream
freeway);
freeway);
is a set that includes all upstream z o n e s o f zone j (i.e., all on-ramps and the
end o f freeway);. Dj is the total off-ramp traffic flow (or, exit traffic; flow from
Oj is the-total flow from z o n e i to freeway mainline (or, entrance trafficiflowto
O D y is t h e d e m a n d from origin i to j .
4.5 D E M A N D L O A D I N G / V E H I C L E
RELEASING
P A R A M I C S release vehicles to the links w h o s e ' m i d p o i n t lies within origin zones. T h e
location that vehicles m a y b e released can be a n y point on the" link: T h i s Simulates the
p a r k e d vehicles m o v i n g a w a y from t h e kerb, out o f driveways and emerging from
l
u n m o d e l l e d side-^streets.
"
H o w e v e r , for a n e t w o r k with freeways and arterials, there are some internal zones and
s o m e cordon points, located at the b o u n d a r y o f freeways and arterials. The-vehicle release
pattern o f P A R A M I C S can only simulate the vehicle release pattern from internal zones.
H o w to release" vehicles from a cordon point o f a' network is *6ur inferest; T h e study on
s
t i m e h e a d w a ^ distribution w a s related to t h i s t o p i c .
*
;r
4.5.1 R a n d o m m o d e l
W h e n the traffic is not congested, or h a s a low density, Poisson'count'distribution cari'be
u s e d to describe the distribution o f the n u m b e r of time periods, w h i c h ' c o n t a i n different
flow level. T h e negative e x p o n e n t i a l distribution can b e further Serived from t h c P o i s s o n
count distribution for m e ' d e s c r i p t i o n o f t h e ' n u m b e r of*'individual t i m e - h e a d w a y s in
various time h e a d w a y intervals. Its probability distribution furictidh i s : °
'
P(kzt)
= l-e
P(h £ t) = e~%
-^or
(4.17)
44
""BBli HLJ.-T3"
vvnere t is a t i m e h e a d w a ^ Valued t is the avefag£-time'headway or-the reciprocal o f t h e
departure rate"tuhit? veh/sec). Since Q'<P(hzt)<lks w e . f a n a s s u m e P(h>t) is a r a n d o m
nurrioer rarigihg 'from 0 to J f'."Theii the" cofresporidiri| 'time h e a d w a y of the r a n d o m
n u m b e r is:
( 4 -18)
t$MK)*~t
w h e r e x = P(h>t),
w h i c h is a r a n d o m n u m b e r uniformly distributed between 0 and 1.
Therefore, the intern-departure time from drrofigin zone is:
tM-tt
= -ln{X)*~t
'
(
(4.19)
w h e r e tj+i and ti are the departure t i m e o f two vehicles. T h e negative exponential
ffis*rnDutfon''has t h e ' inhefeht M a t u r e Hhat the S m a l l e s t "headways- are m o s t likely occur.
However, r if-is 1 impossible to h a v ^ s u c h a'low"time h e a d w a y u n d e r the^ow-densityfrafficT h e shifted negative exponential distribution is thus -employed. Its probability distribution
function is:
P(h>t) = e-I=a
-"
(4.20)
where a is £he m i n i m u m time headway under the low 7 density .traffic. T h e inter-departure
time is: „
.i
tM-t,=a-I„{X)*(t-a)
(4.21)
4.5.2 Constant h e a d w a y m o d e l
If the traffic is congested, vehicles are traveling under car-following regime, T Vehicles
departing from an origin z o n e can be thought to have a constant h e a d w a y . T h e interdeparture time between two consecutive vehicles is the reciprocal o f the departure rate,
i.e.,
'W-</=)£
(4-22)
T h e normal distribution is used to describe the condition that drivers attempt to drive at a
constant time h e a d w a y but the actual h e a d w a y varies around the expected h e a d w a y
because of drivers* perception error.
4.5.3 Composite m o d e l
T h e random model is suitable for the very low traffic flow conditions and the constant
h e a d w a y model is suitable for the very high traffic flow conditions. It is h a r d to identify if
the traffic condition is under r a n d o m state or constant h e a d w a y state. W e can thus
integrate above two m o d e l s to a n e w m o d e l via the use o f a distribution factor, w h i c h h a s
45
a value b e t w e e n 0 a n d 1. T h e distribution factor determines the m o d e l selected for t h e
departure o f vehicles., F o r example, 0.3 o f the distribution factor indicates that 3 0 % o f
vehicles departs according to constant h e a d w a y model a n d other 7 0 % according to die
r a n d o m model.
tM-tt*
MX
if
<b>df
a-la(X)*(t-a)
if
<b<df
(4.23)
w h e r e O is a r a n d o m n u m b e r uniformly distributed between 0 and 1, df is the distribution
factor, w h i c h can b e determined based on the following equation:
df = \.S/t
(4.24)
w h e r e 1.5 second is r e g a r d e d as the, m e a n t i m e h e a d w a y w h e n ( all vehicles are under v e r y
h i g h traffic, flow conditions, r c a n be obtained if w e k n o w - t h e total n u m b e r of-vehicles
that will b e released from an origin zone.
(
4.5.4 R a n d o m n u m b e r generator
P A R A M I C S uses t h e Marsaglia r a n d o m n u m b e r generator. However, 1 w e take the
modified version of t h e r a n d o m n u m b e r generator proposed b y P a r k & Miller to generate
r a n d o m number' for vehicle releasing. J o h n Burton of G & A "Technical Software, I n d is
the author of this modified version of r a n d o m n u m b e r generator, which is also the
r a n d o m n u m b e r generator o f M i t s i m . T h e advantage o f this generator is that it can run on
any m a c h i n e with a 32-bit integer, without overflow.
'
T h e source code for this r a n d o m n u m b e r generator is s h o w n below, in w h i c h " s e e d " is a
global parameter.
d o u b l e p p _ u r a n d o m (void)
{
// Constants for linear congruential r a n d o m n u m b e r generator.
const long int M = 2 1 4 7 4 8 3 6 4 7 ; // M = m o d u l u s (2 A 31)
const long int A = 4 8 2 7 1 ;
const long int Q = M / A ;
const long int R = M % A;,
J
"'<
seed = A * (seed % Q ) - R * (seed / Q);
seed = (seed > 0) ? (seed) : (seed + M ) ;
return (double) seed / (double) M ;
4.6 R E F E R E N C E S
46
•B&
Ashok, -K. (499'6) Estimation' a n d 'Prediction ofi'Time-Dependent Origin-Destination
Flows, P h D ' t h e s i s , D e p a r t m e n t o f - C i y i l a n d Environmental. Engineering, .Massachusetts
Institute of Technology, Cambridge, M A .
Baher Abdulhai, H i m a n s h u Porwal, Wilfred W . Recker, Short''TerrrTFreeway »Traffic
Flow Prediction U s i n g Genetically-Optimized Time-Delay-Based Neural N e t w o r k s , U C I - I T S - W P . 9 8 4 4 , 'July, 1998
^
, , " * , .
B a h e r Abdulhai, J i u h B i i n g Sheu, Will Recker, Simulation o f I T S on t h e l f v i n e F O T A r e a
U s i n g ' P A R A M I C S 1.5' Scalable Microscopic Traffic Simulator: Phase I: M o d e l
Calibration and-Validation, California PATH.ResearcRTlepoft,UCB-JTS-PRR-99 f -12.
i*
,
.•
i
A I i t
i.
Brian L.Smith and Michael J.Demetsky Short-term Traffic F l o w Prediction: N e u r a l
N e t w o r k Approach, Transportation Research R e c o r d 1453, P P 9 8 - 1 0 4
Davis, G.'A..and.Nilian, N . L.-1991. NonparametritrRegression^tnd Short-Term F r e e w a y
Traffic Forecasting, Journal o f Transportation Engineering, P P 1 7 8 - 1 8 8
D e r - h o r n g Lee, X u Y a n g , P. Chandrasekar, P a r a m e t e r Calibration for P A R A M I C S U s i n g
Genetic Algorithm, T R B 2001.
H e n r y Liu, Lianyu C h u , Will Recker, P A R A M I C S A P I D e v e l o p m e n t D o c u m e n t for
Actuated Signal, Signal Coordination and R a m p Control, P A T H w o r k i n g p a p e r U C B ITS-PWP-2001-11
Jeffrey, D. J., R u s s a m , K . , and Robertson, D . L, Electronic R o u t e Guidance b y
A U T O G U I D E : the Research Background., Traffic Engineering and Control, 1987,
PP525-529
Kreer, J. B., A C o m p a r i s o n of Predictor Algorithms for Computerized Control, Traffic
Engineering, vol.45, N o . 4 , 1 9 7 5 , P P 51-56
Hoffmann, G. and J. Janko, Travel T i m e as a B a s i c part o f t h e L I S B Guidance Strategy,
paper presented at the I E E E R o a d Traffic Control Conference, L o n d o n , M a y , 1990
Moorthy, C. K. and Ratcliffe, B. G., Short Term Traffic Forecasting U s i n g T i m e Series
Methods, Transportation P l a n n i n g Technology, v o l . 1 2 , 1 9 8 8 , P P 4 5 - 5 6
Seungjae Lee, D a e h y o n K i m , J u y o u n g Kim, B u m c h u l Cho, Comparison o f M o d e l s for
Predict in Short-term T r a v e l Speeds, Proceedings o f 5 t h W o r l d Congress o n ITS, Korea,
1998
Shbaklo, S., Bhat, C , K o p p e l m a n , F., Li, J., Thakuriah, P., Sen, A., and Rouphail, N . ,
Short-term Travel T i m e Prediction, A D V A N C E Project Report, T R F - T T - 0 1 , 1992,
Illinois University Transportation Research Consortium
47
Smith, B. L. and D e m e t s k y , M . J . , Traffic F l o w Forecasting: C o m p a r i s o n o f M o d e l i n g
A p p r o a c h e s , Journal o f Transportation Engineering, vol.123, N o . 4, 1997, PP261-266
Park, S. K . and Miller, K . W . (1988), R a n d o m n u m b e r generators: Good ones are hard to
find,-Comm. A C M , . V o l . 31, N o . 10;
R. Jayakrishnan, J u n - S e o k Oh, A b d - E l - K a d e r Sahraoui, Calibration and,Path D y n a m i c s
Issues in M i c r o s c o p i c simulation For A d v a n c e d Traffic M a n a g e m e n t and Information
Systems, T R B 2 0 0 1 , 2 0 0 1 .
i
Y a n g , Q. and H.-Koutsopoulos,(1996): A microscopic traffic simulation'for
evaluation of d y n a m i c traffic m a n a g e m e n t systems, Transportation
Research 4C,
p p l 13-129.
i
v
*
^
i
/
Y o u n g - I h n Lee, C h a n Y o u n g Choi, D e v e l o p m e n t o f L i n k Travel T i m e Prediction
A l g o r i t h m , for U r b a n E x p r e s s w a y , Proceedings o f 5 t h ' W o r l d - C o n g r e s s : on ITS? Korea;
1998.
IT
-1
r
1
i in 1
»
i
'
•* ).
'
i
f y
i. 'i
t
.3 1
1.
tc
*
.
n
**.
* *
r
'
'- M
i
'-U'Ji
l
,
i.
48
**-»-
C h a p t e r 5. D a t a Fusion-for B e t t e r T r a v e l
TiirteEstimation
5.1 I N T R O D U C T I O N
tin current traffic surveillance systems,; point detection systems, .such .as, inductance, loops,
-microwave detectors, aridiultrasonic'detectors; have„be.en v±se4 for trafficjp'ata-collection.
-Among ! these detection tech#ologies,jnost';agenc.ies,,rely p n jnductange-loop,detectors,
.mostly j i n g l e - l o o p s . S o m e double, Joppdfctepjors- haye? bjeen installed b e c a u s e d o u b l e
J o d p s x a n provided-accurate*point speed estimation besides the traditional traffic count and
'occupancyoutputs. Although_most;of the-purxent traffic "control a n d m a n a g e n i e n t s y s t e m s ,
suchuas r a r n r u m e t e r i n g - a n d incident deteption>.-p'e.pend on -mege, point-based, data, for
t operation, these point d e t e e t i o n s y s t e n x s l i a y e limitaJiQn-in.prpyiding-se^cJipn travel-times
that are preferable for other Advanced Transportation M a n a g e n i e n ^ and Information
Systems ( A T M I S ) applications, such as the traffic information and route guidance
systems'. T h e ?mqthods.;estimating, section^ teavel *tirne( from,, sjngle'.,loop,,dete i ctpr 4ata
-involve t h e conversion .of point volume .and o c c u p a n c y data £o fraveitfa&Hjasea! on .traffic
flow theory [,l]rThis estimation is i n a c c u r a t e n o t ^ n l y because o f the conversion error but
also! because o f t h e points detection* system-*s l i m i t a t i o n in capturing ar-ea-wide traffic
dynamics. *.
. Recent advances injsensing technologies, s u c h a s Automatic- Global Positioning Systems
(GPS) [2], Vehicle Identification (AVI) [3], pejlular phone*.positioning [4], and vehicle
re-identification technology based on advanced loop detectors [5] o r v i d e o i m a g i n g
technologies [6], provide information on timestamps w h e n vehicles p a s s predefined
locations. In such circumstances, the travel t i m e during a t i m e interval can^be calculated
b y averaging individual vehicles' travel times from upstream to downstream. Currently,
the GPS-based on-board navigation systems h a v e b e e n m o r e and m o r e installed to
passenger cars, w h i c h will b e c o m e potential p r o b e s if a suitable c o m m u n i c a t i o n ' m e t h o d
Even though these systems'arq expected to p r o v i d e high fidelity traffic '.information y/hen
there are enough p r o b e vehicles, these systems'are insufficient yet to p l a y a major r o l e as
m a i n detection systems due to the lack o f p r o b e rates.
It seems inevitable to h a v e multiple data sources for A T M I S applications. T h e y will b e
either point detection data or probe vehicle data. In terms o f the 'acquisition of section
travel time from these data sources, the p r o b e - b a s e d detection systems m a y suffer from
the low frequency'of p r o b e s or the situation that the probe vehicle travel t i m e cannot
reflect the travel times of all vehicles that traversed the section while the point detectors
suffer from the inability iri obtaining travel t i m e 'data directly. I n other w o r d s , e a c h d a t a
source provides traffic information with "different -characteristics, but h a s its »own
limitation. H o w e v e r , these different sources of data could be complementary each other,
and it will b e possible to achieve better measures w h e n t h e y are considered
49
simultaneously. T h e m a i n interest of this p a p e r is h o w to u s e both probe-based data
s o u r c e a n d p o i n t s b a s e d d a t a source for b e t t e r section travel, time estimation.
D a t a fusion is a t e c h n i q u e t o c o m b i n e data from several sources in order to provide
c o m p r e h e n s i v e and accurate information. Several data fusion techniques h a v e b e e n
d e v e l o p e d and m o s t o f t h e m are derived from physical models, feature-b£sed (inference
m o d e l s , and cognitive-based m o d e l s [7]. Physical models estimate the classification and
identity o f an object b y m a t c n i n g m o d e l e d or pre-stored object signatures to the observed
data/ A n e x a m p l e o f physical m o d e l s is Kalman'filtering, Which is- m o s t often used to
positional 'estimatioh^aricl target tracking 'applications '[8*,f 9].< Feature^based .inference
m o d e l s classify or idbntify objects b y m a p p i n g data,-such as-statistical k n o w l e d g e about
an object or recognition of its features. TheYe are m a n y feature-based'algorithms, such as
B a y e s i a n , Dempster-Shafer, artificial n e u r a l network, entropy' iriethodj woting m e t h o d ,
figure o f Merit, etc. Cognitive-based m o d e l s emulate a n d automatevthe decision-making
p r o c e s s e s used b y h u m a n analysts. E x a m p l e s t>f this* T y p e o f m o d e l s a r e knowledge-based
expert s y s t e m ' a h d "fuzzy logic m e t h o d .
f
T h i s chapter proposes a -data fusion algorithm for section travel t i m e estimation that fuses
b o t h ' p o i n t detectOf data and a r e a - w i d e ' p r o b e - d a t a ' u s i n g - t h e ' A d a p t i v e K a l m a n Filtering
( A K F ) technique.' T h i s paper" is* organized^ as follows: Section "2,'describes t h e
m e t h o d 6 1 o g y o f the' p r o p o s e d A K F baSea" section -travel' t i m e fusion algorithm, w h i c h h a s
the capability to dynamically estimate the variances o f state noise and measurement noi'se.
I n Section 3, the p r o p o s e d algorithm is implemented in a microscopic simulation
environment and t h e -'algorithm is evaluated u n d e r ' both recurrent and noh-recurreht
scenarios: Finally t h e c o n c l u d i n g r e m a r k s a r e ^ v e n .
5.2. M E T H O D O L O G Y
5.2.1 K a l m a n Miter
'
'
T h e K a u n a n filter, p r d p o s e d ' b y K a l m a n in,1960, provides^an^fficient.least square based
solution to the estimate o f tne"stafe Vector x o f a disorete'tinle controlled process t h a r c a n
b e described b y tije linear stochastic difference equation*[ 10j:
*
*
Xk =®k.k-\xk-y +Uk+Wk_}
'(5.1)
i
w i t h a m e a s u r e m e n t vqc^or y that is,
yk = Hkxk+
Y*
it*
•
.
,
v
., ** j
)
i$t&
,
wfc a n d v i a re t he s tate a n d m easurement n pises, r espectively. (J-ljey a r e a ssurned J o b e
uncorrelated white noises.with,normal distributions;i
* ** -,
.~-f/.
piw)~(0,Q)
.
•*
-r
.($••?> i
50
j*v)~$<U)
i n
,
(5.4)
In m a n y applications, t h e state n o i s e covariance Q and m e a s u r e m e n t n o i s e covariance R
are often assumed to b e constants, w h i c h are usually determined prior to the operation of
t h e filter. R is generally determined b a s e d on off-line s a m p l e m e a s u r e m e n t s . H o w e v e r , Q
is m o r e difficult to b e determined because the process state is typically not' observable.
In Equation 5.1, O is a transition matrix that connects the state at the previous time step
k - 1 with the current time step k. u is an optional control input to the state x. In Equation
5.2, matrix H relates t h e sfatfe t o t h e m e a s u r e m e n t y. In p r a c t i c e , '3>, u* Etrid H m i g h t ' b e
time-variant. If Q and R are^exactly k n o w n , the solution to t h e K a l m a n filter p r o b l e m is:
xk=<S>k,k-\Xk^+uk
*
, ^ = 7^1mkMl^kTl
xki=Sk +Kk[yir-Hkxk]
(5.5)
.
J
h=rk-'KkHkPk>
(5.7)
(5,8)
^__<5-9)
w h e r e xk' and Pk are defined as a priori state estimation and its estimation covariance at
t i m e step k.
xk and Pk are defined as the a posteriori state estimate a n d its estimation
covariance at t i m e step k. K* is defined as K a l m a n gain.
Equations 5.5 a n d 5.6 propagate t h e current state and error c o v a r i a n c e estimates to obtain
a priori state estimation for the next t i m e step. Equations 5.8 and 5.9 are used to
incorporate t h e rneasurement into t h e a priori state estimation i n order to obtain a n
i m p r o v e ^ a posteriori estimate.
5.2.2 Application o f K a l m a n Filter to the Seciion Travel Time.Estiniatioh
K a l m a n fitering has b e e n used to solve sorne r traffic p r o b l e m s , such as the d y n a m i c
estimatidn of traffip density [ 1 1 , 1 2 ] , freeway O D dernand m a t r i c e s [13], the prediction o f
traffic v o l u m e a n d travel t i m e [ 1 4 , 1 5 , 1 6 1 . l l i i s p a p e r uses K a l m a n filter.to associate t w o
data sources^ point detector daja and probe vehicle, data. W h i l e b o t h traffic count and
p c c u p a n c v data, ,are provided frorn the point* detectors, t h e section travel t i m e c a n b e
directly sampled from probe vehicles. H i e objective is to obtain a better estimation of
section travel time. This section provides an overall description o f t h e model.
5.2.2.1 Travel T i m e from Section Density
T h e m o d e l w e are proposing 1 here is based 'on the conservation o r continuity equation.
T h i s equation s h o w s t h e s a m e form as in fluid flow, and t h e solution o f t h e conservation
equation in traffic flow w a s first proposed b y Lighthill and W h i t h a m [ 1 7 ] and R i c h a r d s
[18]. T h e fluid conservation equation characterizes compressible 1 flow, that is,
51
—£. +
= o (or traffic generation rate)
d x
ax
(5.10)
where,
q - flow (vehicles/hour)
k = density (vehicles/mile)
x = location
t = time
If the speed of such traffic fluids is v, w e h a v e the following basic identity:
q = k-v
(5.11)
F r o m this equation, travel t i m e can b e derived as a function o f section density and traffic
flow rate. For a section w i t h detector stations at its boundaries, the traffic flow passing
this section (i.e., q) c a n b e estimated as a linear function 6f the tiafficsfiow'passing the
upstream detector station q u and d o w n s t r e a m detector station qa- A s s u m i n g that the traffic
inside the section is h o m o g e n e o u s , a n intuitive estimate of the section travel t i m e is:
A * ^ ^
v
q
^ * _ _
oc-qu+{l~a)-qd
( M 2 )
where,
ttSD = section-density-based travel t i m e
Ax = length of the section
a = a smooth'parameter
E q u a t i o n 5.12 actually establishes the relationship among t i e section travel'time, section
density, and passing flow of section m e a s u r e d b y t w o point detectors at boundaries ( of the
section. A s in E q u a t i o n 5.12, the section travel time can b e estimated as long as accurate
m e a s u r e s of section density.
' J
Figure 5.1 shows a typical section of urban freeway, \sjhich includes, oiie ofi-rarrip and'one
b f P r a m p . Let l^J(t) d e n o t e 'the n u m b e r o f vehicles*within a section a H i i n e ' t and'let* N u ' ^
Na(t), represent trie n u m b e r o f vehicles passing the* upstream and downstream de^ectpr
stations during time (t-1., t). *^<m(t) and No«(t)' are the' traffic cdunts' entering and exiting
the freeway section from on-ramps and" off-ramps, "respectively/If the count information
l
is precise, then "the s e q u e n c e Nft) can b e represented" b ^ :
"
' *'
°
N{t)^N(t-l)
+
{Nll(t)+N0„(t)-[Nd(t)
+ Nojr(t)]}=:N{t-l)
+ ^N(t)
^,(£.13),
Let k ( t ) denote the .section 4 e n g i t y ,at t i m e t. k(t) c a n b e estimated based, o p the
relationship be,twe,en N ( t ) and-)t(t):
, f
^
* j
•*.
y
L*Ax
where,
52
L = n u m b e r of lanes on'mainlinel freeway
At = time interval o f detector data aggregation
Nu
i** 'Hi
Nc
-Figure 5.1 A typical section pf-freeway
T h e section density is a non-observable state variable. A s a deterministic equation, the
section density sequence-mayoiot.be correctly,or-jpbustly. estimated using/Equation 5.14
rif £here v are a n y inpufcdata errors. T h e worst. situation^ is that this .equation cannqt? c o n v e r g e
and thus";losathe ability.to-estiniate;the section d e n s i t y . ^ solutionjtofthisjs tp. introduce a
feedback control m e c h a n i s m , s u c h as K a l m a n filtering, t o this estimation process.
5.2.2.2 Travel T i m e from Probe Vehicles
'When, pfobe vehicje d a t a are available, J h e travel- t i m e during a> time, interval .can be
.calculated b y averaging- individuali vehicles.' JraveijtiniQS from'upstream, to dQwnstreani.
"That is, the average travel time (ttA\ is calculated based on-the .vehicles tfjat arrived at the
vdownstream station during.a given time-step v[-l 9].
£ « - « )
,! tt. = M=l
N
(5.15)
where,
*
'*
'*
N =Aiumbet o f s a m p l e vehicles arriving the d o w n s t r e a m station ~
ty- time w h e n vehicle n passes the downstream station d
t" = time when vehicle n passes the upstream station u
5.2.2.3,Design o f K a l m a n Filter '
W e apply K a l m a n filtering to this travel t i m e estimation process. W e u s e b o t h d a t a
sources: one from point detectors and the other from probe vehicles. Based o n E q u a t i o n
5.14 and Equation 5.12, the state and m e a s u r e m e n t equations o f t h e K a l m a n filter are:
State equation: k(t) = k(t -1) + u(t).+ w(t -1)
(5.16)
Measurement equation: tt(t) = H(t)*k(t) + v(t)
(5.17)
where w(t) is the system noise, w h i c h is a zero-mean Gaussian white noise with the
variance of Q. v(t) is the measurement noise, i.e., the n o i s e of section travel t i m e
53
estimates from p r o b e vehicles. v(t) is a w h i t e n o i s e w i t h t h e variance o f R. In addition,
according to E q u a t i o n 5.14, w e have:
u{t) = -^-*W(t)
L*Ax
(5.18)
Based on Equation 5.12, w e set a = 0.5 in this study. T h e n w e have:
//(,)
=
*Z
<?*(0 + * r f (0)/2
(5.19)
N o t e in this p r o p o s e d m o d e l , the •transition'matrix, O, is^a constant of 1. In addition, w e
u s e k instead o f x and tt instead of y.
T h e solution of this Kalman'filter is s h o w n in Equation 5.5 to-Equation;5.9: At each t i m e
step, the K a l m a n filter w i l t output a posteriori-state estimate o f the section density, w h i c h
-can b e further used to calculate the estimated section travelrfme using E q u a t i o a 5 . 1 2 .
5.2.3 Adaptive K a l m a n Filter: estimation of n o i s e statistics
i
A w e l l - k n o w n limitation o f the application of K a l m a n filter is that it is hard to obtain the
estimates o f state n o i s e covariance Q"and m e a s u r e m e n t n o i s e covariance *R,'which'might
c h a n g e with each t i m e step or m e a s u r e m e n t in a real-world .system.-If R and Q- cannot
reasonably represent the-features of the state and m e a s u r e m e n t noises, the performance^of
K a l m a n filtering will degrade. T h e inappropriate values of covariance matrices *R and Q
can cause the divergence of the optimal estimator o f K a l m a n filter.
A c c u r a t e k n o w l e d g e o f n o i s e covariance R and Q is critical for the successful application
o f K a l m a n filter to t h o s e processes, such as the section travel time estimation process,
with time-varrant-*noise statistics. Several researchers h a v e studied on the sorcalled
A d a p t i v e K a l m a n F i l t e r ( A K f ) , w h i c h . i n c o r p o r a t e s ^ h e o n l i n e estimation o f R t l a n d Q
w i t h the K a l m a n Filter process. The.methop's of A K F w e r e class4fied;jntp four categories,
Bayesian, m a x i m u m likelihood, correlation, and covariance m a t c h i n g [20].
y
T h i s paper uses a covariance matching m e t h o d based on the research work d o n e b y
M y e r s K.A. and T a p l e y B.D. [21]. T h e basic concept of this method is to -niatch "trie
estimated covariance w i t h theoretical covariance.
5.2.3.1 Estimation o / R
Based on Equation 5.17, the measurement noise v(t) cannot b e determined because the
true state vector k(t) is u n k n o w n . A n intuitive' approximation o'f the'measuremeht noise at
t i m e step j is given by:
'
•
.
u
rj = ttj-Hjkj
•*
(5.20),
54
where'-rj is r f e f i n e d ^ t h e m e a s u r e m e n t n o i s e sample-, it is also k n o w n as the innovation or
' t h e m e a s u r e m e n t residual. T h e innovation s e q u e n c e is>.a zero meant Gaussian, w h i t e n o i s e
sequence. This is a necessaity and sufficient-condition for the optimality o f - a K a l m a n
filter [22].
A s s u m i n g "that t h e n o i s e sample s e q u e n c e r / can" b e representative ,of t h e true
measurement noise sequence Vj, rj and v, should b e independent and h a v e the s a m e
distribution. T h e n t h e actual covariance o f Vj can, b e approximated b y t h e u n b i a s e d
estimate of its sample covariance:
•n
N
>
~
Cr=—Yrrf
•
>
(5.21)
where :N" is the number, of measurement noise* s a m p l e s , , w h i c h is selected empirically in
order to provide a reasonable noise statistics'based o n the latest^lata. <
Based on Equations 5.20 and 5.21, the expected value* of Cr is:
E(Cy) = j-^HjPjHj+R
(5.22)
T h e unbiased estimation of R-will be:
k
=jhit>lrjr>
y="
~^
w >
]
(5
-23)
5.2.3.2 Estimation o f Q
B a s e d on'Equ'ation 5.16, the-state h o i s e w(t).cannot be"determined b e c a u s e the t r u e state
vectors k(t) a n d k(t^l) are unknown". T h e intuitive approximation o f the state noise at t i m e
step j is given by:
qj^kj-QjjJj^
(5.24)
w h e r e q; is defined as t h e state noise sample. It is a zero m e a n w h i t e noise. A s s u m i n g that
the no'is^ sample sequence oj can b e representative of the true state noise sequence Wj, qj
and wj should b e i n d e p e n d e n t and h a v e t h e s a m e distribution. T h e n t h e actual covariance
o f Wj can be approximated b y the unbiased estimate of its sample covariance:
*.-7fei>">
(5
-25)
55
w h e r e N is the n u m b e r o f m e a s u r e m e n t noise samples, w h i c h is selected empirically in
order to provide a reasonable noise statistics based on the -latest data. Following the s a m e
p r o c e d u r e in estimating R,<the unbiased estimation o f Q will be:
5.2.4 S u m m a r y o f t h e A K F fusion algorithm
T h e p r o p o s e d A K F b a s e d fusion algorithm can b e s u m m a r i z e d as follows. A t each time
step,
(1) Calculating u (t) a n d H ( t ) b a s e d o n t h e d a t a o f l a s t t i m e interval f r o m p o i n t
detector u s i n g Equations 5.18 and 5.19.
(2) State propagation: calculating a priori estimate o f k(t) and estimation
covariance.using Equations 5.5 and 5.6.
(3) Estimating R using Equation 5.23 based on last N measurement noise samples
(4) U p d a t i n g K a l m a n gain using-Equation 5.7.
(5) State estimation: calculating a posteriori estimate o f k(t) and estimation
covariance using Equations 5.8 and 5.9.
(6) Estimating Q using Equation 5.26 based on last N state noise samples.
(7) Calculating the section travel time based on Equation 5.12.
T h e p r o p o s e d fusion algorithm can b e executed without specifying initial estimates of R
and Q, although good initial values o f t h e m can m a k e the algorithm perform better at the
b e g i n n i n g o f its operation.
5.3. E V A L U A T I O N
T h i s study evaluates the proposed algorithms b y comparing various travel time estimation
m e t h o d s . T h e e v a l u a t i o n ' s p e r f o r m e d in a strptch of freeway .using, a microscopic •traffic
simulation model; P A R A M I C S (Version 4 Build 10) -based on teal w<?£ld data. W e
consider detection errors as well as non-recurrent traffic congestion for more, realistic
evaluation.
5.3.1 S t u d y Site
.?t
The, study site is a six-mile stretch o f northbound freeway 1-40S, b e t w e e n junctions of
freeway
1-5 and Culver Drive, in O r a n g e County, California. I ' h e schematic
representation of the, study site is illustrated in Figure 5 ^ . T h e ' l i n e across the freeway
lanes represents mainline detector, w h o s e l o c a t i o n is shown o n the bottom b y its postmile. A s a major freeway linking O r a n g e County to Los Angeles, this stretch of freeway
experiences h e a v y traffic congestion during the morning p e a k hours, w h i c h is Caused b y
h e a v y traffic flows from freeway S R - 1 3 3 and leffery Dr. In th\s study, w e only
considered the section from S a n d C a n y o n D r to Jeffery Dr, w h i c h includes o n e o n - r a m p
56
and off-ramp. This section features a _ l o t p f Shockwaves durjng.the m o r n i n g peak-hours
because o f the strong bottleneck point at Jeffery,Dr.
Los Angeles <-
Irvine • •
Jeffery Dr
Culver Dr
©
©
©
Sand canyon Dr
SR-133
Irvine Central Dr
©
©
©
©
&
6.21 5.74 5.55
5.01
4.03 3.86
3,31
'3.04
2.35
1.93 1.57
1.11 0.93
0.6
A
.Study section
Figure 5.2 Schematic figure of the study site
This network used in P A R A M I C -simulation has_been calibrated b a s e d on previous
simulation studies [23]. T h e time-dependent O D demands, estimated based o n the real
world traffic data of M a y 22, 2001, w e r e used for this simulation study. T h e simulation
period is frorheboto 9V00 A M .
_ _
5.3.2 Travel T i m e Estimation M e t h o d s
In the previous section, w e described three w a y s o f estimating section travel time: travel
time estimation from section density, travel t i m e estimation from p r o b e vehicles, and
travel time estimation fusing two data sources. In addition to these three methods, -a
b e n c h m a r k travel t i m e a n d a simple travel t i m e estimation m e t h o d from point detection
,data are considered for the comparison purpose.
5.3.2.1 B e n c h m a r k Travel T i m e
Within a discrete t i m e and space domain, the representative travel t i m e can b e defined a^
a m e a n travel t i m e within the closed area defined b y the t i m e (t-1 and t) and space (x u and
Xd),
as shown in Figure 5.3.
f
The. true, space-mean speed for vehicles within the closed area is equal to, the total travel
•distance, divided, b y .the totaj-travel t i m e ,of all vehicles in t h e closed area [24]. A n
unbiased estimate of the space-mean speed is:
^ ^ n ^ . x j - m a x ^ x j
v=-2=L
Z W
n»i
(5.27)
+
U;)-max^:)}
where,
N = n u m b e r of vehicles traversing the section during the time interval
x" = position of vehicle n at time t
57
xu — position o f the u p s t r e a m loop detector station u
xd = position of the d o w n s t r e a m loop detector station d
tnd — t i m e w h e n vehicle n p a s s e s the d o w n s t r e a m station d
tl = time w h e n vehicle n p a s s e s the upstream station u
Space
t+1
time
Figure 5.3 A temporal and spatial illustration o f section travel.time
T h e average section travel t i m e can t h e n b e estimated.
Ax
«s =
v
where,
ttg = average section travel t i m e
Ax = length of thVsectiori, i.e.'x<j - x u
i
(5.28)
J'
i
> v
S u c h an average section travel t i m e can b e considered as a-"true" mean* travel t i m e that
represents the section. In this study, this section travel time is used as a benchmark travel
time.
*"
'
5.3.2.2 1 Section Travel T i m e frorii'Pbint Detector D a t a
T h e general m e t h o d to estimate section travel t i m e from loop detector data' is based on
average speed estimates at the b o u n d a r y detector stations. T h e average speed b y lane can
b e obtained'direptly from d o u b l e ldpps or estimated from s i n g l e loops [25^*26*]. Based dn
these lane-based speeds, tne station speed is generally defiried'as the weighteo^ayerage'oT
lane speeds.
^
v* o = X
(
9kAt)*vu(t)
J
'I
)
*(5.29)
;=i
where,
L = n u m b e r of lanes at loop detector station k
q ki i(t) = traffic count at lane i o f upstream detector station k
*V
,}i
; !
'
58
'Vk,i(t) =4raffic count"at lane i dfidowhstream detector station-k.
f
iisi . '• •* • c <s
a ^i
T h e n l h e section t r a v e L t i m e l c a n b e . e s t i m a t e d [27] s:
u /
'
<'-«
Ii !
*
.. v
(l
. ^ J'_-jjAx, Ax
2
* „
<j
- Ji
X' 2 v„- -vd: *
>:>
*
r»r
t
(5.30),
where,
vH = speed at upstream detector
vd = speed atcjownstream detector
In this study, w e only consider the double loop case in order to avoid handling the speed
estimation from single l o o p data.
*
t'
''
5.3.2.3 Implementation o f Travel T i m e Estimation M e t h o d s
W e implement the p r o p o s e d A K F fusion algorithm and other above-mentioned travel
t i m e estimation m e t h o d s from double* l o o p s p e e d data, -section density.? alculation,, and
probe*-vehicle data ih."a microscopic .traffic s i m u l a t i 6 r r m o d e l , . P A R A M I C S . T h e s e "travel
time estimates are c o m p a r e d with the b e n c h m a r k travel- time described .above. T h e s e
travel time estimation m e t h o d s are summarized in Table 5.1.
Table 5.1 S u m m a r y of Travel T i m e Estimation M e t h o d s ,
Implementation M e t h o d
Method
D a t a source
*
B e n c h m a r k Travel T i m e Individual v e h i c l e ' s
trajectory from simulation
Speed data from double loop E q u a t i o n 5.29, 5.30
D o u b l e Loop Speeddetectors
based M e t h o d
Probe-based M e t h o d
Travel time from, projpe
Equation-5.15
vehicles,
*t
t t
Traffic counts from loop
Density-based M e t h o d
E q u a t i o n £.14, 5.12
detectors
(1) Traffic counts from loop
AKF-based D a t a F u s i o n
E q u a t i o n 5 . 1 5 , 5.16,
detectors
5.17,5.12
Algorithm
(2) Travel time from p r o b e
vehicles
I n the probe-based m e t h o d , w e do*not consider indrvip^ua^ vehicjes' t r a v e l . t i m e errors
(introduced by sensing technologies) bu^jtheir sarnpling errors. The, performance p f this
probe-based m e t h o d varies b y sampling rates o f p r o b e vehicles. In this method, there m a y
not, havp a, -probe within, a, t i m e interval when; the s a m p l i n g rate is, low. I n ,such
circumstances, the,-current t i m e step's travel time is assumed to b e s a m e as previous, t i m e
step's travel time.
59
In this study, w e considered detection errors • o f point detectors. According to an
evaluation report c o n d u c t e d b y T e x a s Transportation Institute [28], single loop detectors
can p r o v i d e a typical 9 8 % accuracy on loop c o u n t data and .double loop*detectors can
p r o v i d e a typical 9 6 % accuracy on speed data. W e understand this accuracy, 6, as the
average abstract relative error o f 1- 8. D u e t o the lack o f t h e knowledge* about this error
distribution, w e a s s u m e d it as a uniform distribution varying frorq - 4 % to 4 % with the
abstract error m e a n o f 2 % and zero mean. It h a s the following,properties o f the
probability density function:
[0
f(X)
~\/(l-S)*2
,/
if
x<-(l-<5)*2,x>(l-<?)*2
'W'31)
-0-^*2<x<(l-<5)*2
where,
5 = accuracy o f l o o p count, w h i c h is 9 8 % in this study
5.3.3 Performance Indices
T w o error indices, R o o t M e a n Square Error ( R M S E ) and-Mean Abstract Percentage Error
( M A P E ) , are employed" forithe-performance evaluation o f section travel t i m e ' m e t h o d s .
T h e s e t w o indices are defined as:
A,
-' •
^SE^ljf^t-'if
(5-32)
T
MAPE = - y ^ ^
where
'
Zj = the true valulTbf variable z at s a m p l i n g point i •
>'
z,= the estimated v a l u e o f variable z„at s a m p l i n g point i »
N = total n u m b e r o f s a m p l e s d f variable' z
5 . 3 . 4 E v a l u a t i o n Scenarios
'
-(5.33)
*.
'
*
l
'
fl
)
W e considered t h e following four scenarios:
*
(1) Recurrent congestion: without loop error
(2) Incident: w i t h o u t loop error
(3) Recurrent 1 congestion: wiuY98% accuracy o f loop'couht
(4) Incident: with 9%% accuracy of foop count
"
>
J
«
'
,
)
In the two incident scenarios^ari incident w a s injected to the m i d d l e o f ihe'study-section,
as shown in'FiguYe 5.3 (the location is close t o ' t h e off-rarrip a t ' J e f f e r ^ D r ) . T h e incident
w a s assumed to block a lane for 10 m i n u t e s from 8:20 to 8:30 A M .
°~
60
5.3.5 Evaluation Results ^
;<l
i All simulations-started t o r n 6 : 3 0 A M ' a n d tended-at 9:00 AM:. The-first T 5 m i n u t e s o f
each "simulation r u n i » regarded a s . t h e w a r m i n g u p p eriod. S i n c e i h e fu'sion a l g o r i t h m
needs s'ome t i m e - t o initialize a n d fine-tune p arameters,'its p erformance w a s c o m p a r e d
with other-algorithms between the time period from 7:00ito 9:00 A M .
T h e section travel time w a s estimated based on a 30-sec interval for all m e t h o d s under all
scenarios. T h e estimated travel times w e r e compared with the b e n c h m a r k section travel
time in order to obtain the two performance measures, including M A P E a n d R M S E .
Table 5.2 and 5.3 s h o w s the performance o f all evaluated algorithms undex four scenarios
in terms of M A P E and R M S E , respectively. B a s e d these performance m e a s u r e s , w e .find
that the fusion algorithm can generate a better section travel t i m e estimate compared to
all other evaluated estimation algorithms u n d e r all scenarios.
Table 5.2 M A P E o f various estima tion algorithms under different scenarios 1
i
Scenario 3
Scenario 1
Scenario 2
Scenario 4
D o u b l e L o o p Speedbased Method
Probe-based M e t h o d
( 5 % probe rate)
24.3%
24.4%
22.0%—•
20.0%
15.3%
16.1%
15.3%
116.1%
Density-based M e t h o d
r
t
10.9%
7.6%
18.8%
16.3%
A K F Fusion Algorithm-
7.2%
7.8%
7.9%-
8.2%
Table 5.3 R M S E o f various estima tion algorithms under different scenarios
Scenario 1
Scenario 2
Scenario 3
Scenario 4
34.1
43.7
32.2
33.1
25.0
34.1
25.0
34.1
Density-based M e t h o d
12.5 * "*
28.4
19.8
35.9
A K F Fusion Algorithm
11.5
20.8
10.7
18.6
Double Loop Speedbased Method
Probe-based Method
( 5 % probe rate)
T h e density-based m e t h o d shows better performance compared to probe-based
double loop detector based m e t h o d s u n d e r ideal detection conditions, i.e. Scenario 1
Scenario 2. D u e to the, involvement of- detection errors in Scenario 3 and 4,
performance o f t h e density-based m e t h o d - b e c o m e s worse, as illustrated i n ' T a b l e 5.2
5.3. B u t it still h a s a c o m p a r a b l e performance with the probe-based m e t h o d .
and
and
the
and
61
M
B a s e d o n the description of the p r o p o s e d fusion algorithm, t h e density-based concept is
used in formulating the state equation and the p r o b e based section travel time estimate is
used as the m e a s u r e m e n t . T h e fusion algorithm improves the: estimation of 4he section
d e n s i t y i ( a n d ' t h u s t h e estimation.of t h e section travel time) t h r o u g h the .incorporation o f
p r o b e - b a s e d travel t i m e data w i t h , p o i n t ^detector data. C o m p a r e d - t o the probe-based and
density-based algorithms, the 'fusion- algorithm improves section travel time estimate
significantly in t e r m s o f both M A P E and R M S E , as s h o w n in T a b l e 5.? and 5.3.
350
300
* 't » '•* .
J_I
* - ;_: * ±
8» 250 •j,*jh ««t*
i.»ift-j.j! lu^U'-i^ ' *i J
!*' V
J 200
I 150
c
so 100
CO
7f«...',"'•*'JI *
•V- -
7:15
7:30
7:00
7:45
*
8:00
_-£-
J
t*
8:15
8:30
• Benchmark travel time —-*— AKF fusion algorithm
* i.m ;
8:45
Probe-based method
Figure 5.4 C o m p a r i s o n o f section travel t i m e estimation u s i n g t h e probe-based-method
( 5 % s a m p l i n g rate) and the A K F fusion algorithm u n d e r Scenario 3
J^i,
350
300 r"iT~ni
J" fjtfff
2 250to
.1 200
150
i T.
,.' 'n *!;,„.,.,,**>„.
I 100
50
7:00
7:15
7:30
7:45
8:00
8:15
8:30
8:45
1
,—u
• |*i.,—'-*
'—(
p
r
:
«—Benchmark travel time —.—AKF fusion algorithm * Probe^based method
_LT
! I
1 ' i
-'*
L±i*
£_
Figure 5.5 C o m p a r i s o n o f section travel i i m e estimation using*the probe-based m e t h o d ,
« (5%-skmplirig rate) and t h e A K F fusion algorithm u n d e r Scenario 4n> '•
»*i
K ^'. 1 '
Figures 5.4 and 5.5 further c o m p a r e the section travel time estimation using the probebased m e t h o d and the fusion algorithm under Scenarios 3 and 4, respectively. Regardless
62
of the obvious incorrect section travel t i m e estimates from t h e p r o b e - b a s e d algorithm
during t h e congestion period, t h e fusion algorithm c a n p r o v i d e a better section travel t i m e
estimate "for"the w h o l e study period. Therefore, t h e fusion algorithm effectively captures
t h e variation o f section travel t i m e d u e to t h e integration o f b o t h l o o p count d a t a from
single loops and p r o b e vehicle data.
C
T h e proposed A K F fusion algorithm -worlds in a w a y like this: t h e state variable, i.e.
section density, is-estimated b y the state equation 1 , and t h e n t h e state variable-is further
corrected based on ttie^measurement data from p r o b e r ' a r i d j i h e K a l m a n gain, estimated
based "bn noise variances and the current system estimation variance. T h e k e y point o f t h e
proposed fusion "algorithm is its on-line estimation o f state -noise variance R a n d
measurement n o i s e variance Q. T h e estimated R a n d Q u n d e r Scenario 4 are s h o w n in
Figure 5.6. Since R is the variance o f travel t i m e estimation error from p r o b e s a n d h a s a
high value, w e u s e d ln(R) instead o f R in order to s h o w it together w i t h Q in a figure.
This figure s h o w s t h a f t h e s y s t e m m o d e l ( i . e . s t a t e e q u a t i o n ) b e c o m e s - m o r e a n d m o r e
accurate with the progression* o f the fusion process. D u r i n g t h e incident period, the
measurement noise v a r i a n c e Q keeps ( a^small v.ajue, w h i c h represents that the system
m o d e l is pretty accurate. H o w e v e r , the variance of the m e a s u r e m e n t n o i s e b e c o m e s larger
because the* probe-basedJ algorithm cannot 1 provide a g o o d .sectionntravel time estimate
right after the o c c u r r e n c c o f the incident, as illustrated in Figure 5.5.
Figure 5.6 T h e on-line estimation o f noise variances of R and Q u s i n g the A K F fusion
algorithm under scenario 4
T h e adaptive filtering m e c h a n i s m o f t h e proposed fusion algorithm provides a n
appropriate feedback t o t h e e ^ i m a t i p n o f t h e section,-density at e v e r y t i m e step, w h i c h
.causes an^optimized section density estjmate. Figure 5.7 . c o m p a r e s t h e section density
estimation, using uje proposed,, fjusion algorithm and the section density £>ased .algorithm
.under, S c e n a r i o 4 . T l i e s e c t i o n d e n s i t y es£imated,by t h e f u s i o n a l g o r i t h m h a s a M A P E
error o f 5.3%. It is m u c h better than the density estimate, from the, section density based
algorithm that h a s a M A ^ E error as high as 16.9%. F r o m this point of view, the proposed
fusion algorithm has an accurate .estimation of the section density and thus leads to the
accurate section travel time estimation.
63
7:00
7:15
7:30
7:45
8:00
-TR0E —m— Fusion
8:15
8:30
8:45
- Density
Figure 5.7 C o m p a r i s o n o f the estimation o f section density using ,the j AKF fusion
algorithm and the density-based m e t h o d u n d e r .Scenario 4
Figure 5.8 Section travel t i m e estimation using the double loop speed-based m e t h o d
under Scenario 3
A s a comparison, t h i s ' s t u d y compared^the fusion algdfithm w i t h ' t h e double 'loop based
section travel time estimatibh algorithm. B a s e d - o n v T a b l e 5 . 2 ' a n d 5.3, this double- loop
based algorithm p e r f o r m ^ % e worst ainoftg W ^ g o r i t h m s l A s "shown in Figufe *5f.8,' the
section travel tifnens underestimated by-double-lo#p d a t a . ' T h i s result is "consistent with
the c u r r e n t : k n b w l e d | e about t h e point 1 detector,"*whicrT provides a ' h i g h e r average point
speed'than'the / avera*ge [29], a n d ' t h u s causes a'lower travel time estimate'uslng r Eqifation
5.30. Therefore; the- estimation of section* travel time-using polht detector data-is not
64
robust and-the* estimation a c c u r a c y cannot be guaranteed b e c a u s e of various ^location
specific issues, such as vehicle weaving, curve link, etc. T h i s explains that pointidetectors
cannot capture the actual traffic condition. It also implies that an accurate estimation o f
pointfspeed using point detector data cannot.be used to i m p r o v e the provision o f accurate
area-wide traffic condition.
'
<
As" shown in Figure 5.9, a larger sample size X>f p r o b e s i m p r o v e s the accuracy o f the
travel* time estimate-, a l t h o u g h this accuracy i m p r o v e m e n t is n o t obvious after-the s a m p l e
rate^is h i g h e r "than 2 0 % . H o w e v e r , this travel t i m e , calculated, u s i n g the.&rrival-based
methodj'does not r e p r e s e n t m e b e n c h m a r k ' t r a v e f t i m e well. H o w e v e r , the p r o p o s e d fusion
algorithm- can significantly improve the estimate o f section travel" time through' the
integration o f t w o data sources. It performs "well'with-even a small s a m p l e size o f p r o b e s .
F o r example, 1% p r o b e s can provide a 11.8% M A P E error, w h i c h decreases to 8 . 4 % w i t h
3%-probes. Figure *5.9 also s h o w s ihat the-fusion of loop data w i t h a 10% sample size o f
probes-can provide.a highly .stable-accuracyjof'the,section travel time estimate..A h i g h e r
sample- size -cannot 5 provide a m o r e laccufate travel time/ estimate. This implies that the
proposed fusion algorithm has reached itSjmaximal performance. It is because any m o d e l ,
including; the m e a s u r e m e n t ^equation of the ' p r o p o s e d A K F fusion, algorithm, cannot
perfeitly capture the r a n d o m n e s s o f the traffic system.
— __ J
*' t^
hi „ J
* % :><< .. r.
^--XJ->.:-1
„1 »£
j '••: \ t^!( ,* "i!i fP !l faff
*• > ft '1 J*Jt
.
?
* £,<**•"**'
.* K**M*
•v ,w*'
o%
10
20
30
. #1^ ¥*» E
40
50
60
Probe sampling-rate'(%)
_VJL".
70
80
90
•AKF fusion algorithm —Br Probe-based method
Figure 5.9 Comparison o f section travel t i m e estimation using the A K F fusion algorithm
and the probed based method with respect to the s a m p l i n g rate o f probes
514 C O N C L U D I N G
REMARKS
This travel time data fusion problem is essentially a traffic Congestion recognition and
trayel time estimation p r o b l e m plus the traditional data fusion 1 problem. A c c o r d i n g to the
feature of available data s6urces, me^ectiori'travel t i m e ' c a n b e estimated based 6 n either
limited samples o f a probe-based data source or statistical data from a point detector data
source. Each data source h a s different features on its data collection method and t h u s
65
s h o w s different
condition.
a c c u r a c y o f section travel t i m e estimation under different
traffic
T h e p r o p o s e d fusion algorithm is established based on traditional flow theory and
K a l m a n filtering theory. It appropriately fuses t h e single l o o p detector data (i.e. traffic
count data only) with p r o b e vehicle data (i.e. s a m p l e section travel time data) in order to
obtain a m o r e accurate section travel t i m e estimate. T h e state noise variance R and
m e a s u r e m e n t n o i s e variance Q o f the K a l m a n filter are estimated dynamically b y
adapting to the real-time data. T h e p r o p o s e d fusion algorithm was-evaluated through the
c o m p a r i s o n with- other algorithms, including the probe-based ^method, the density-based
m e t h o d and the d o u b l e - l o o p - s p e e d based 1 m e t h o d , under b o t h recurrent .and incident
scenarios. T h e fusion algorithm s h o w e d m u c h better performance.
T h e detectors in t h e field a r e n o t perfect a n d e a c h detector h a s its o w n e r r o r features.
There is currently n o e n o u g h k n o w l e d g e ' t o s h o w w h a t thej^etection errors are..This paper
a s s u m e s l o o p detector errors are.uniform distributed with certain accuracy..It,may not be
t h e c a s e ' i n the real w o r l d . The. future w o r k will' be-io test the p r o p o s e d fusion algorithm
using the data from real wbrld. h v a d d i t i o n , s i n c e ' t h e p r o p o s e d ' a l g o r i t h m .can self start
without parameter inputs and adapt to the real data for n o i s e measurement, it-is eligible
for on-line applications.
T h e proposed data fusion algorithm is a generic algorithm. It can also handle different
combinations o f d ata s ources, s u c h a s t h e f u s i o n o f s ingle 1 o o p d ata w ith d o u b l e 1 oop
speed data. It m a y b e possible to use the single loop data only b e c a u s e w e did not u s e the
o c c u p a n c y data o f single loop detector outputs yet. This m a y n e e d s o m e investigations on
the p ossibilities b ased o n b oth s imulated d ata a n d r eal w orid d ata. A Iso, t he p roposed
fusion algorithm can o n l y w o r k with two data sources. Potentially, if can b e applied to the
multiple data sources.
5.5 R E F E R E N C E S
1.
2.
3.
4.
>t
Petty, K.F., Bickel P., Ostland r -M., R i c e , J., Schoenberg, F., Jiang, J., and Ritov,
Y. (1998) A c c u r a t e Estimation o f Travel Times from Single Loop Detectors,
Transportation Research*A, Vol. 32, N o . l*,.pp. 1-17:
G u o P., and Poling, A.Z>-, (1?95) g e o g r a p h i c f o r m a t i o n Systems/Qlobal
Positioning Systernsr Design, for, N e t w p r k Travel / H m e , Study, Transportation
Research Record 1497, Transportation Research Board, Washington, D C , pp.
135-139.
D i o n F . a nd R a k h a H . ( 2 0 0 3 ) E stimating.S patial 7 ravel T i m e u-smg A utornatic
Vehicle Identification Data, 8 2 n d A n n u a l ^Meeting Preprint CE>-ROM,
Transportation Research,Board, J a n u a r y 12-16, .Washington, D.C.
Yim, Y,B.Y., anc},R. Cayfbrd. (200)1) Inyesti^atiori o f Vehicles ( as £ro]?es U s i n g
Globa] Ppsitioning System ano^Cellular P h o n e Tracking: Fie\d"Operatibnaf ^ e s t .
California P A T p R e p o r t . UCB-ITS-P^VP-2001-9. University o f California,
Berkeley, C A .
'
, '.,
"
.
, ,,
66
5.
,'
Sun, C-, Ritchie, S „ Tsai, K., and Jayakrishnan,- R.i (1-999) U s e o f Vehicle
Signature Analysis and Lexicographic Optimization for Yehicle Reidentification
on Freeways, Transportation Research Part C. Vol. 7, No.4, pp. J 67-18$.
o V M a c Q a r l e y - A . (-1999) Advanced I m a g e .Sensing M e t h o d s i b r TraffiCjSurveillance
" a r i d ^ D e t e c t i o n , California P A T H :Research . R e p o r t U C B - I T S - P R R - 9 9 - 1 1 ,
University: o f California, Berkeley.
.- ^
7. *Klein,X.A.'(l 993) Sensor and Data.Fusibn Concepts and Applications-, V o l . T T 1 4 ,
SPIE Press, Bellingham, Washington, U S A .
8. 'Sarma, V..SJ and S. Raju (1991) Multisensor D a t a ' F u s i o n and P e c i s i o n ; § u p p o r t
for A i r - b o m e Target Identification, I E E E Transactions o n Systems;. M a n and
fl* 1 Cybernetics. -Vol. 21, f)p. 1224-1230. •> { H
>
9. Qi, H . a n d ' M o o r e j - J . B. -(2002) D i r e c t Kalar*'filtering A p p r o a c h i b r Q P S / I N S
, V -i Integration, I E E E Transactions o n A e r o s p a c e and Electronic Systems, YQI. 3 8 , N o .
2, pp. 6 8 8 . 6 9 3 .
'
j
lO^Kalman, R.E. (1960) ( A N e w * ' A p p r o a c h to Linear, Filtering a n d . Prediction
Problem's, Transaction o f t h e ^ A S M E ' ^ J o u r n a l of Basic* Engineering, Vol. 82
-(Series-D),pp. 35-45.
'
. '
11. Gazis,D^C- a n d K n a p p QJ3£<(1971) O n - l i n e Estimation: o f T r a f f i c D e n s i t i e s from
Time-series of F l o w and Speed Data, Transportation Science* V o l . 5„ N o . 3, pp.
283-301.
->
-—12. Szeto M . W . and Gazis D. C. ( 1 9 7 2 ) Application o f K a l m a n , f i l t e r i n g to the
Surveillance and Control o f Traffic Systems, Transportation Science, V o l . 6, N o .
4, pp. 419-439.
13. H u , S. R., M a d a n a t S. M., Krogmeier, J. V., and Prrta S. (2001) Estimation o f
D y n a m i c A s s i g n m e n t Matrix and O D D e m a n d s using A d a p t i v e K a l m a n Filtering,
Intelligent Transportation Systems Journal, Vol. 6, pp. 281-300.
14. Okutani I. and Stephanedes Y. J. (1984) D y n a m i c Prediction o f Traffic V o l u m e
through K a l m a n Filtering Theory, Transportation Research, Vol. 18B, N o . 1, pp.
1-11.
15. Gazis, D . C . and Liu, C. (2003) K a l m a n Filtering Estimation o f Traffic C o u n t s for
T w o N e t w o r k Links in Tandem, Transportation Research Vol. 37B, N o . 8 , pp.
737-745.
16. Chen, M . and Chien S. I. J. (2001) D y n a m i c F r e e w a y Travel T i m e Prediction
Using P r o b e Vehicle Data; Link-based vs. Path-based, 81st A n n u a l M e e t i n g
Preprint C D - R O M , Transportation Research Board, January 7-11, 2001,
Washington, D . C .
17. Lighthill, M . J., and G. B. W h i t h a m (1957) O n kinematic w a v e s , II: A theory o f
traffic flow o n l o n g crowded r o a d s . P r o c e e d i n g s o f t h e R o y a l S o c i e t y , L o n d o n
Series A 229, pp. 317-345.
18. Richards, P. I. (1956) S h o c k w a v e s on the Highway. Operation Research, Vol. 4,
pp. 42-51.
19. Dion, F . ' a n d Rakha, H . (2003) Estimating Spatial Travel T i m e s u s i n g A u t o m a t i c
Vehicle Identification Data, 82nd Annual M e e t i n g Preprint
CD-ROM,
Transportation Research Board, J a n u a r y 1 2 - 1 6 , 2 0 0 3 , W a s h i n g t o n , D . C .
20. Mehra, R . K . (1972) Approaches to Adaptive Filtering, I E E E Transactions on
Automatic Control, Vol. 17, pp. 693-698
67
21. M y e r s K . A . and T a p l e y B.D. (1976) Adaptive Sequential Estimation with
U n k n o w n N o i s e Statistics, I E E E Transactions on A u t o m a t i c Control, Vol. 21, N o .
4,pp.520-523.
22. M e h r a R. K . (1970) O n the i d e n t i f i c a t i o n - o f Variances and Adaptive K a l m a n
Filtering, I E E E Transactions on Automatic Control, Vol. 15, N o . 2, pp. 175-184.
23. Chu, L., Liu X . , Recker, W., Zhang, H . M . ( 2 0 0 3 ) P e r f o r m a n c e Evaluating of
A d a p t i v e R a m p M e t e r i n g Algorithms; accepted, b y A S C E Journal o f
Transportation Engineering
24. Gerlough, D . and M . Huber. Traffic F l o w Theory: A M o n o g r a p h , Special Report
165, T R B , 1975.
25. W a n g , Y . and N a n c y L. N . (2000) F r e e w a y Speed-Estimation U s i n g Single L o o p
Outputs. Transportation Research Record, N o . 1727,pp* 120-126.
26. Hellinga, B . ' R . (2002) I m p r o v i n g - F r e e w a y Speed .Estimates from Single-Loop
Detectors, Journal o f Transportation Engineering, Vol. 128, N o . 1, pp. 58-67.
27. Chen, C. (2003) F r e e w a y Performance M e a s u r e m e n t . System (PeMS),.California
P A T H R e p o r t UCB-ITS-PRR-&003-22, University o f California, Berkeley, C A .
28. Middleton, D . R., Jasek, D . L., and Parker R. T. ( 1 9 9 9 ) Evaluation o f S o m e
Existing Technologies for 1 Vehicle Detection, T e x a s Transportation Institute
Research R e p o r t 1715-S:
2 9 . H a i g h t , F. A . (1963). M a t h e m a t i c a l Theories o f Traffic Flow. N e w York:
A c a d e m i c Press.
i
!
T
f
r
t
68