13.3 Arc Length and Curvature
advertisement

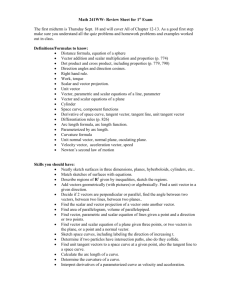
Instructor: Longfei Li Math 243 Lecture Notes 13.3 Arc Length and Curvature Arc Length We learned the length of a curve in 2D is the limit of lengths of inscribed polygons, and we obtained the formula: Z bp L= [f 0 (t)]2 + [g 0 (t)]2 dt a if the curve has the parametric equations x = f (t) and y = g(t) and both f 0 and g 0 are continuous. Similarly, the length for a curve in space with a vector equation r(t) =< f (t), g(t), h(t) >, a ≤ t ≤ b is given by the formula Z bp L= [f 0 (t)]2 + [g 0 (t)]2 + [h0 (t)]2 dt a provided f 0 , g 0 , h0 are all continuous. We can write the formula into a more compact form: Z L= b |r0 (t)|dt a Example: Find the length of the arc of the circular helix with vector equation r(t) = cos ti + sin tj + tk from the point (1, 0, 0) to (1, 0, 2π). Solution: The curve from the point (1, 0, 0) to (1, 0, 2π) is corresponding to the parameter t from 0 to 2π, i.e. 0 ≤ t ≤ 2π. So Z 2π Z 2π p Z 2π √ √ 0 2 2 2 [− sin(t)] + [cos t] + [1] dt = 1 + 1dt = 2 2π L= |r (t)|dt = 0 0 0 1 Figure 1: This is the graph that the equation r(t) = cos ti + sin tj + tk from the point (1, 0, 0) to (1, 0, 2π) represents A single curve C can be represented by a vector equation r(t) =< f (t), g(t), h(t) >, and the vector equation is called a parametrization of the curve C. Remark: Parametrizations of a curve is not unique. For instance, the twisted cubic r(t) =< t, t2 , t3 >, 1 ≤ t ≤ 2 can also be represented by the parametrization r(u) =< eu , e2u , e3u >, 0 ≤ u ≤ ln 2 provided t = eu . Remark: Reparametrize a curve is similar to change of variables. The arc length arises naturally from the shape the curve and does not depend on parametrization. Arc Length Function: Suppose C is curve given by a vector function r(t) = f (t)i + g(t)j + h(t)k, a≤t≤b where r0 is continuous and C is traversed once as t increases from a to b. Definition The arc length function s is defined by Z t s(t) = |r0 (u)|du a Remark: s(t) is the arc length of the part C between r(a) and r(t). According to the Fundamental Theorem of Calculus, we have ds = |r0 (t)| dt Often times, it’s useful to parametrize a curve with respect to its arc length because arc length is independent on parametrizations. 2 Example: Reparametrize the line r(t) =< 2t, 1 − 3t, 5 + 4t > with respect to arc length measured from (0, 1, 5) in the direction of increasing t. Solution: The arc length measured from the point (0, 1, 5) corresponding to t = 0. To reparametrize the curve w.r.t. the arc length, we need the relation between s and t. Since Z t√ Z t √ √ ds 0 0 = |r (t)| = | < 2, −3, 4 > | = 29 ⇒ s(t) = |r (u)|du = 29du = 29t dt 0 0 Therefore, s t= √ , 29 and the reparametrization is obtained by substituting for t s s s r(s) =< 2 √ , 1 − 3 √ , 5 + 4 √ > 29 29 29 Curvature A parametrization r(t) is called smooth on an interval I if r0 (t) is continuous and nonzero. A curve is called smooth if it has a smooth parametrization (No sharp corners or cusps; tangent vector turns smoothly.) Note that when C is nearly straight, the direction of tangent vector changes slowly; when C bends or twists more sharply, the direction of tangent vector changes more quickly. Curvature at a point is defined to measure how quickly the curve changes direction at that point. Definition: The curvature of a curve is dT κ= ds where T is the unit tangent vector. Remark: differentiate with respect to arc length. It’s easier to compute a curvature if it is expressed in terms of t instead of s. 3 From Chain Rule: dT dT ds dT dT . ds = ⇒ = dt ds dt ds dt dt We know ds = |r0 (t)|, dt So κ(t) = |T0 (t)| |r0 (t)| The curvature of the curve given by the vector function r: κ(t) = |r0 (t) × r00 (t)| |r0 (t)|3 (Read theorem 10 in the textbook for the proof) For a plane curve, y = f (x), curvature can be given by κ(x) = |f 00 (x)| [1 + (f 0 (x))2 ]3/2 (This formula is derived from the vector equation formula by using r =< x, f (x), 0 >) Example: Find the curvature of the curve given by r(t) =< a cos t, a sin t, 0 >. Solution: r0 (t) =< −a sin t, a cos t, 0 > r00 (t) =< −a cos t, −a sin t, 0 > So |r0 (t) × r00 (t)| = |(a2 sin2 t + a2 cos2 t)k| = |a2 k| = a2 and |r0 (t)| = a Therefore, from the formula given by the vector function: κ(t) = |r0 (t) × r00 (t)| a2 1 = = |r0 (t)|3 a3 a Remark: r(t) in this example represents a circle with radius a. The results shows larger circles have smaller curvature while smaller circles have lager curvature. 4 The Normal and Binormal Vectors Sometimes it’s useful to have a moving reference frame. Remark: Reference frame is a set of orthogonal vectors r0 (t) . We need a vector orthogonal to |r0 (t)| 0 T. Recall from the example of previous lecture that |T| = 1 ⇒ T · T = 0, i.e., T0 is orthogonal to T. T0 is not necessarily a unit vector, but if r is smooth, and r0 6= 0, we can find the corresponding unit vector of T0 . We have already introduced the unit tangent vector T(t) = Definition: The principle unit normal vector is defined by N(t) = T0 (t) |T0 (t)| Remark: N(t) indicates the direction where the curve is turning. We need another unit vector that is orthogonal to both T and N to get a reference frame in 3D space. Definition: The binormal vector is defined by B(t) = T(t) × N(t) Remark: B is a unit vector because |B| = |T × N| = |T||N| sin π2 = 1 We call the plane containing N and B at a point P the normal plane of the curve at P (It consists of all lines orthogonal to T) Formula Summary: T(t) = r0 (t) , |r0 (t)| N(t) = T0 (t) , |T0 (t)| B(t) = T(t) × N(t) dT |T0 (t)| |r0 (t) × r00 (t)| κ(t) = = = 0 ds |r (t)| |r0 (t)|3 5