Elasticity and mechanical advantage in cables and ropes
advertisement

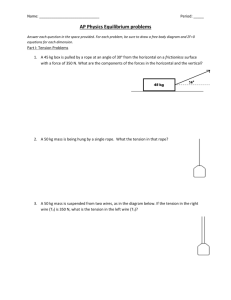
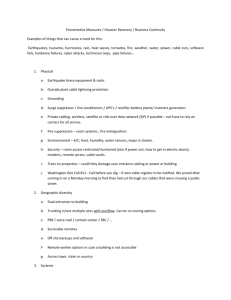
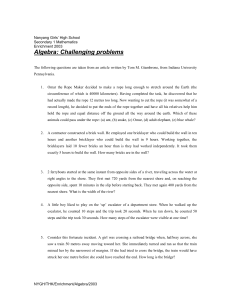
IOP PUBLISHING EUROPEAN JOURNAL OF PHYSICS Eur. J. Phys. 28 (2007) 715–727 doi:10.1088/0143-0807/28/4/011 Elasticity and mechanical advantage in cables and ropes M J O’Shea Department of Physics, Kansas State University, Manhattan, KS 66502, USA E-mail: mjoshea@phys.ksu.edu Received 7 February 2007, in final form 25 April 2007 Published 7 June 2007 Online at stacks.iop.org/EJP/28/715 Abstract The conditions under which one can gain mechanical advantage by pulling with a force F perpendicular to a cable (or rope) that is fixed at both ends are examined. While this is a commonly discussed example in introductory physics classes, its solution in terms of fundamental properties of the cable requires one to model the elasticity of the cable. This solution has several complex and interesting features, e.g. a large increase in the tension in the cable may occur upon application of F if (i) F lies in a certain range and (ii) the initial tension T1 in the cable (before F is applied) satisfies T1 < 0.0340 κ. Here, κ is the spring constant of a unit length of the cable. For steel cables and cables composed of other materials such as carbon nanorods where the elasticity is low, significant increases in tension are possible. Examples involving walking a tightrope and attempting to increase the tension in a rope hauling a load are considered. Two programs to solve the equations of this work are available in the electronic version of this journal. S This article has associated online supplementary data files (Some figures in this article are in colour only in the electronic version) 1. Introduction It has often been noted in introductory physics texts that the tension in a cable (or rope) that is secured at both ends can be increased significantly by pulling with force F on the cable in a direction perpendicular to it [1, 2]. This method may be used to increase the tension in a cable in many situations, e.g. a car stuck in the mud being pulled by a winch, or a raft stuck on a rock being pulled by a rope, see figure 1. In other situations where a perpendicular force is present, such as the weight force F of a person on a tightrope, it may not be advantageous to have a large increase in tension upon application of F. In this work relations are derived between the elasticity of the cable and the tension in the cable when F is applied. Sections 2–5 give a basic analysis of a model in which Hooke’s law is assumed to hold and section 6 gives a quantitative discussion of the examples of figure 1. c 2007 IOP Publishing Ltd Printed in the UK 0143-0807/07/040715+13$30.00 715 716 M J O’Shea (a) (b) (c) Figure 1. (a) A car with a wheel stuck in a rut is pulled by a tow vehicle, (b) a raft pinned against a rock by moving water is pulled by a group of people, (c) a person walks a tightrope. In (a) and (b) a possible force F that is applied after the cable or rope is tied off is shown. In (c) a perpendicular force F is present due to the weight of the person. Table 1. Young’s modulus (Y), spring constant of a unit length of cable (κ), yield and tensile strengths, critical value of tension (T1c) and mass per unit length (m/L0) for selected cables. An 11 mm diameter cable is assumed as discussed in the text. Strength (kN)b Rope/cable Ya (GPa) κ a (MN) Yield Tensile a (kN) T1c m/L0 (kg m−1) Spider silk Titanium (6% Al, 4%V) Steel (ASTM-A36 steel) Tungsten Carbon nanotube 8.0 116 210 411 1,000 0.76 11.0 20.0 39.1 95.0 14 80 90 52 – 109 90 150 140 5700c 26 375 680 1330 3200 0.12 0.43 0.74 1.83 0.22 a The error bars on Y, κ and T1c for metals are less than 5%. The variation in Y, κ and T1c for the spider silk is 25%. These variations for the carbon nanorods are somewhat larger. b The error bars on the strengths are as large as 30%. c This tensile strength was estimated using a tensile strength/area of ∼60 GPa [6, 7]. 2. Cables and ropes If the length of a material changes linearly with applied tension (Hooke’s law), then the elasticity of a cable made up of this material can be described by Young’s modulus, Y = stress/strain. The spring constant κ of a unit length of this cable is related to Y by κ = Y A, (1) where A is the cross-sectional area of the cable. The change in length x of a cable under tension T may then be written as T = kx. The spring constant k is given by k = κ/L0, where L0 is the untensioned length of the cable1 . Values for Y [3] and calculated values of κ are given in table 1 for various metals composing cables, the most important of which is steel. A tungsten cable is considered since it has the largest value of Y and is the stiffest (in terms of 1 The extension x scales with the length of the cable (or rope). Writing Hooke’s law as (1/k) = x/tension, 1/k also scales with length. Therefore, (1/k)/L0 = (1/κ) ⇒ κ = kL0 . Elasticity and mechanical advantage in cables and ropes 717 Table 2. Static elongation (s), spring constant of a unit length of rope (κ), tensile strength, critical value of tension (T1c) and mass per unit length (m/L0) for selected ropesa. Rope (diameter) s κ (kN) Tensile strength (kN) T1c (kN) m/L0 (kg m−1) Static rope (11 mm) Static rope (22 mm) 0.018 0.0054 44 176 29 116 1.5 5.8 0.075 0.30 a The error bar on the strength is approximately 20% and the error bars on s, κ and T1c are 5%. elongation) of cables that can be made from commonly available metals. Titanium cables are also considered due to their specialized applications. Spider silk [4] is considered since it is one of the strongest of naturally produced fibres and is only ∼30% weaker by area than steel. Spider silk is significantly more elastic than steel as can be seen by comparing the calculated values of κ assuming an 11 mm diameter cable given in table 1. Carbon nanotubes are considered since their Young’s modulus and tensile strength are extremely large and are comparable to diamond [5–7]. The calculated value of κ for a hypothetical carbon nanotube cable is significantly larger than for any metallic cable. Note that ‘nano’ refers to the diameter of the carbon unit and not to its length which can range from microns up to metres. While the measured value of Y for real ropes composed of many carbon nanotubes is large, it has not reached the value found for single carbon nanotubes [5–7]. Static ropes are low-stretch ropes and can be used in rappelling, hauling loads and in tyrolean traverses. Manufacturers often characterize the elasticity of ropes by the static elongation defined by s = x/L0 . Here x is the change of length of a rope of untensioned length L0 when a standard mass mS of 80 kg is hung (not dropped) on its end [8]. Assuming a Hooke’s law behaviour, κ = mS g s−1 . (2) For an 11 mm diameter static rope of kernmantle construction, s is about 0.018 (1.8%). See table 2 for s and the calculated values of κ for two selected static ropes. Hooke’s law approximation is good, provided the tension in a material is not too large. In the case of cables composed of metals and of spider silk a linear region exists up to a tension close to the yield point, given in table 1, and the results of this work are limited to this region. The tensile strength is given in tables 1 and 2 and is measured by subjecting a previously unused material to a large enough tension to cause it to fail. Working loads for safe use of cables and ropes are usually recommended to be <20% of their tensile strength. 3. Applying F at the midpoint of a cable (c = L1/2) We consider a cable (or rope) of untensioned length L0. Stretching the cable to length L1 and fixing it at both ends increases the tension to T1, see figure 2. When the perpendicular force F is applied, the cable is stretched further and the tensions in the left and right sides of the cable increase from T1 to TL and from T1 to TR respectively. The left and right sides of the cable now make angles of θ L and θ R respectively with the horizontal. Also, the point P shifts downward a distance y and shifts horizontally so that its new distance from the left support is d. In our analysis below, we assume that the weight of the cable is small enough to be ignored. This is reasonable if the weight force determined from L0 and the mass per unit length (given in tables 1 and 2) of the cable are small compared to the larger of T1 and F. 718 M J O’Shea Figure 2. A rope is stretched between two fixed points separated by a distance L1 and is under tension T1. A perpendicular force F is then applied at point P, initially a distance c from the left support. A free body diagram is shown for the point P. We consider a special case where the perpendicular force F is applied at the midpoint of the cable (c = L1 /2). Symmetry implies TL = TR ≡ T, θ L = θ R ≡ θ , and d = c. Hooke’s law gives 2 (3) L1 + (2y)2 − L1 k. T − T1 = Newton’s second law gives F = 2T sin θ = 2T y/ y 2 + (L1 /2)2 . Using this to eliminate y from equation (3) gives2 2T (T1 + κ) F (T + κ) T =√ −κ = . 2 2 2((T + κ)2 − (T1 + κ)2 )1/2 4T − F (4) The second form of equation (4) is obtained by making T in the square-root of the first form the subject. Several limits for T can be obtained using the first or second form of equation (4): (i) F T1 and κ: T → T1 , (ii) F T1 and κ: T → F /2, (iii) κ T1 1/2 and F (κ = 0): T → T12 + (F /2)2 , (iv) κ T1 and F, T1 and F of the same order: T → (κF 2 )1/3 /2. Defining reduced variables t = T /κ, t1 = T1 /κ and f = F /κ, equation (4) can be written as t= 2 f (t + 1) . 2((t + 1)2 − (t1 + 1)2 )1/2 We also use T1 = k(L1 − L0 ) = kL1 − κ obtained from Hooke’s law to eliminate the quantity kL1. (5) Elasticity and mechanical advantage in cables and ropes (a) 719 (b) Figure 3. (a) The contour (full line) corresponding to mechanical advantage γ = 1 on an f − t1 plot. The perpendicular force F is applied at the midpoint of the cable or rope. (b) Detail showing maxima γ max (dashed line) and minima γ min (dotted line) in γ (f ). An inflection point of γ (f ) is at (t1,infl, finfl). 4. Mechanical advantage (c = L1 /2) To examine the circumstances under which significant tension increases can be obtained, we contrast the case of applying a force F perpendicular to a cable at its midpoint by applying F parallel to the cable. In this latter case, the tension on the load side of the cable is T1 + F.3 We define the mechanical advantage γ ≡ T /(T1 + F ) = t/(t1 + f ). To determine the circumstances when mechanical advantage can be obtained, we first consider the special case γ = 1 or t = t1 + f. Using this value of t, equation (5) can be rewritten as a cubic equation in f and solved by standard methods; see the appendix. We consider three ranges of t1. For 0 t1 < t1c (t1c = 0.0340), two real positive solutions exist and are given by 1/2 2(7t1 + 3) 2 ϕ + 2π − , cos fupper = − 25t12 + 42t1 + 45 9 3 9 (γ = 1), (6) 1/2 2(7t1 + 3) 2 ϕ + 4π − flower = − 25t12 + 42t1 + 45 cos 9 3 9 where 125t13 + 315t12 + 567t1 + 297 cos ϕ = . 2 3/2 25t1 + 42t1 + 45 (7) For t1 = t1c only one positive solution exists given by either of the above solutions. For t1 > t1c, no real positive solutions for f exist. The solutions fupper and flower correspond to the upper and lower parts of the solid contour as shown in figure 3 and meet at the mathematical critical point (t1c , fc ) = (0.0340, 0.0378). For points that lie within the contour, γ > 1 and it is favourable to apply the force F perpendicular to the rope to maximize T. Note that if t1 t1c (or T1 T1c, T1c ≡ κ t1c), mechanical advantage is not obtained for any value of f. Values of T1c are listed in tables 1 and 2 for various ropes and cables, respectively. As the contour of figure 3 approaches the origin, the slope of the contour can be evaluated as limt1→0 ∂f/∂t1 = 16t1 . Thus as the contour approaches the origin, its slope approaches zero and a straight line 3 F is applied parallel to the cable. We denote the tension on the load side of the cable by Tparallel. If the parallel force is applied at some distance b from the load end of the cable, then defining δ = b/L1 , it can be shown that the tension on the load side is given by Tparallel = T1 + (1 − δ)F if F T1 /δ, and Tparallel = F if F T1 /δ. We assume b ≈ 0 (F is applied close to the load for the parallel case) and so Tparallel = T1 + F. 720 M J O’Shea Figure 4. Dependence of the mechanical advantage γ on t1 and f. The perpendicular force F is applied at the midpoint of the cable or rope. The dashed and dotted lines correspond respectively to maxima (γ max) and minima (γ min) in γ (f ). The solid lines represent the mechanical advantage for the tightrope and car as indicated. (a) (b) Figure 5. (a) Dependence of γ on f for selected values of t1. (b) Blow-up of the dashed oval region in (a). of any slope f/t1 > 0 will intersect the contour. This implies that mechanical advantage can always be obtained for sufficiently large κ. We now consider the more general case, where γ = 1, and solve equation (5) numerically for t as a function of t1 and f. γ is then calculated, and the results are shown in figure 4 as a surface plot. A divergence is present in γ when both f and t1 become small (but f = 0), and such a limit is approached when κ becomes large. It can be seen that as f becomes large, then γ → 1/2. Also as f → 0, then γ → 1. The dashed and dotted lines correspond to a ridge and a valley respectively on this surface plot. The valley actually curves around behind the main peak (not shown) and terminates at the origin. It is useful to look at how γ varies with f since in a particular cable or rope set-up, f is likely to be varied as the rope system is used. Figure 5 shows plots of γ (f ) for selected values of t1. For the curve that passes through the critical point (t1 = t1c = 0.0340), a maximum Elasticity and mechanical advantage in cables and ropes 721 and a minimum are present and correspond to points on the ridge and the valley of figure 4 respectively. The maximum has a value of unity at f = fc = 0.0378. Generally, maxima and minima are present in γ (f ) provided t1 < t1,inf (t1,inf = 0.0613). At t1 = t1,inf , the maxima and minima vanish and only an inflection point is left. If t1 > t1,inf, then γ (f ) is a monotonically decreasing function of f. The maxima (γmax ) and minima (γmin ) in γ (f ) are plotted in figures 3(b) and 4 and meet at the inflection point of γ (f ), which is located at (t1,inf, finf ) = (0.0613, 0.0347). To obtain maximum mechanical advantage, it is clearly advantageous to choose f close to the position of the maximum in γ (f ). Note, however, that these maxima are broad so that a range of values of f can lead to a large mechanical advantage for a given t1. 5. Applying F away from the midpoint of a cable (c = L1 /2) We now consider the general case where F is applied at some point P a distance c (c = L1/2) from the left support, see figure 2. In this case TL = TR and θ L = θ R, and d = c. Details of the derivation of TL and TR are given in an ancillary file (see stacks.iop.org/EJP/28/715), and we outline the main steps here. To find expressions for TL and TR, we apply Newton’s second law to the point P and obtain TL cos θL − TR cos θR = 0 and TL sin θL + TR sin θR − F = 0. Substituting for the sine and cosine functions in terms of y and d and solving these equations for d/L1 and y/L1 give F 2 + TR2 − TL2 d = L1 2F 2 and y = L1 2 F + TR2 − TL2 F 2 − TR2 + TL2 . 2 2F 2 2 TL2 + TR2 F 2 − TR2 − TL2 − F 4 (8) (9) The spring constant kL of the segment of rope to the left of point P is given by kL = kL1/c. Applying Hooke’s law to the situation, where the rope is initially stretched between the two fixed points (F is not yet applied), gives T1 = (L1 − L0)k = kL1 − κ which allows elimination of kL1 to give kL = (T1 + κ)/c. (10) We now apply Hooke’s law to the situation where F is present. For the segment of rope to the left of point P, TL − T1 = ( y 2 + d 2 − c)kL . Substituting for d, y, kL, using equations (8)– (10), defining α ≡ c/L1 and using reduced variables gives tL (t1 + 1) f 2 + tR2 − tL2 tL + 1 = , (11) 2 αf 2 tL2 + tR2 f 2 − tR2 − tL2 − f 4 where tL = TL/κ and tR = TR/κ. A similar analysis of the segment of rope to the right of point P gives tR (t1 + 1) f 2 + tL2 − tR2 tR + 1 = . (12) 2 (1 − α)f 2 tL2 + tR2 f 2 − tR2 − tL2 − f 4 A symmetry check can be done by exchanging the quantities 1 − α ↔ α and tL ↔ tR to make sure that equation (11) is transformed into (12) and vice versa. Two limits of equations (11) and (12) for tL and tR are of interest. They are as follows. 722 M J O’Shea (1) Limit α → 0. Rearranging equation (11) to make α the subject and then taking the limit indicates that f 2 + tR2 − tL2 → 0. Substituting this limit into equation (12) yields tR → t1 , and therefore tL → f 2 + t12 . Similar relations may be obtained for the case α → 1. We leave it to the interested reader to determine expressions for the values of θ L and θ R in these limits. (2) α = 1/2. Symmetry implies that tL and tR should be equal and in fact both equations (11) and (12) reduce to equation (5). While it is possible to solve equations (11) and (12) analytically for tL and tR, the results are prohibitively complex. It is easier to solve these equations numerically, and we have implemented this in a program available to the reader as an ancillary file (see stacks.iop.org/EJP/28/715). 6. Applications We briefly consider three examples where a perpendicular force is present. 6.1. Walking a tightrope Consider a tightrope where the perpendicular force is applied by the weight of a person at the midpoint of the tightrope. We assume a tension T1 of 2 kN before the person steps onto the tightrope and a mass of the person of 80 kg so that F is 0.784 kN. Comparing T1 with the values of T1c in table 2 indicates that no mechanical advantage is expected for the 11 mm static rope since T1 > T1c. For the 22 mm static rope and all the cables (see tables 1 and 2), mechanical advantage can be obtained since T1 < T1c. To find the actual tension T and mechanical advantage γ , equation (4) can be solved as a function of κ for given values of F and T1. This equation can either be solved numerically or can be turned into a quartic equation in T for which standard programmes exist to find the solution. In this latter case there are two real solutions (one positive and one negative) and two complex solutions for T if T1, κ and F are all positive and so T can be identified as the single real positive solution. T as a function of κ obtained from equation (4) is shown in figures 6(a) and (b), and the values of κ for several cables and ropes are indicated. At large enough κ, T increases as κ 1/3 as expected from section 3. Once T is determined, the mechanical advantage γ can be calculated. For an 11 mm static rope γ is 0.92, and no mechanical advantage is obtained. For a steel cable and a carbon nanotube rope, a significant mechanical advantage is obtained with the calculated values of γ of 4.40 and 7.22 respectively. While the steel cable and carbon nanotube rope have a much higher strength than the static rope, the anchors will also have to support this large tension. The value of κ above which the mechanical advantage is obtained can be found from the point where the T − κ curve crosses the horizontal dashed line corresponding to the quantity T1 + F in figure 6(a). A value of κ of 76 kN is obtained. A part of the mechanical advantage diagram of figure 3 is reproduced in figure 6(c) and the dashed line, slope f/t1≡ F/T1 = 0.392, represents possible combinations of f and t1 for the tightrope that can be obtained as κ is varied with larger κ corresponding to points closer to the origin. The intersection of this dashed line with the contour γ = 1 can also be used to show that mechanical advantage is obtained if κ > 76 kN. To gain insight into why the mechanical advantage γ increases rapidly with κ we examine the topology of the γ surface of figure 4. γ as a function of t1 and f for the case of the tightrope is plotted as a line on this γ surface. Different points along the line correspond to different Elasticity and mechanical advantage in cables and ropes (a) 723 (b) (d) (c) (e) Figure 6. T versus κ on (a) linear and (b) logarithmic scale for the tightrope walker (T1 = 2 kN, F = 0.784 kN). (c) Trajectory of values of f and t1 as κ is varied (dashed line) and the contour corresponding to γ = 1 (solid line). (d) Vertical shift y/L1 and (e) angle θ of cable. F is applied at the midpoint of the cable or rope. The values of κ for several ropes and cables are indicated in (a) and (b). values of κ with points closer to the t1 − f origin corresponding to larger κ. This line climbs directly up the steep maximum so that γ quickly becomes large as κ increases. More insight is gained from a plot of γ versus f. For the case of the carbon nanotube cable, t1 = 2 kN/95 MN = 2.1 × 10−5 and a plot of γ versus f for this value of t1 is shown in figure 5. This plot has a maximum value of γ of 9.7 at an f of 4.4 × 10−5. The actual value of f for the tightrope walker on a carbon nanotube rope is 0.784 kN/95 MN = 8.3 × 10−6. The peak in γ is rather broad and this value of f is close enough to the maximum in γ (f ) such that the actual value of γ of 7.22 is still large. The value of y/L1 (the sagging of the rope) and θ may also be calculated and are shown in figures 6(d) and (e). Both y/L1 and θ are moderately large at small κ and become small at larger κ. Of course, the small amount of sagging of the tightrope at large κ is ‘paid for’ with a larger tension in the rope. We now consider the tension when the tightrope walker is not at the midpoint of the rope and assume an 11 mm static rope so that t1 = 0.0455 and f = 0.0178. Figure 7 shows tL and tR obtained by solving equations (11) and (12) as a function of α = c/L1 for the tightrope walker. The inquisitive reader can check the limits for tL and tR as α → 0 or α → 1 discussed in section 5. A maximum in tL occurs when F is applied at α ≡ αmax = 0.455, see the inset of figure 7(b). Note, however, that the values of tL at α = 0.5 and at α ≡ αmax differ by less than 1%. The value of tL drops when F is applied close to either end of the rope (α → 0 or α → 1) and tR behaves in a similar way. If κ is increased (i.e. a stiffer cable or rope is used), the calculation can be repeated and the maxima move towards α = 0.5 and become more pronounced. If κ is decreased then the maxima move away from α = 0.5 and at small enough κ maxima are no longer present. The quantities θ L, θ R, y and dshift/L1 = (d − c)/L1 are shown in figures 7(c) and (d). θ L and θ R are the mirror images of each other. The quantity which describes the drop in height of point P, y/L1, is symmetric about α = 0.5. The quantity which describes the horizontal 724 M J O’Shea (b) (a) (c) (d) Figure 7. (a) The tightrope before and after the walker steps on the rope. (b) The reduced tensions tL and tR, (c) angles θ L and θ R and (d) vertical (y/L1) and horizontal (dshift/L1) movement of the point P as a function of α (=c/L1). F is 0.784 kN, T1 is 2 kN and an 11 mm static rope (κ = 44 kN) is assumed. The inset in (b) shows a blow-up of the maxima in tL and tR. (a) (b) Figure 8. T versus κ on (a) linear and (b) logarithmic scales for the car (T1 = 12 kN, F = 0.45 kN) and the raft (T1 = 7 kN, F = 2.7 kN). The value of κ is indicated for several ropes and cables. The perpendicular force F is applied at the midpoint of the cable or rope. shift of point P, dshift/L1 is antisymmetric. Each of these symmetries can be argued from the symmetry of the original problem. The drop in height is moderately small being at most about 10% of L1 and the horizontal shift is extremely small being at most only 1% of L1. 6.2. Pulling a car stuck in the mud Consider a car with a wheel stuck in a rut or mud on the side of the road being pulled with a small winch that can create a tension T1 of approximately 12 kN. If 12 kN is not enough to move the car, is it possible to significantly increase the tension in the cable by locking off the winch and applying a force perpendicular to the cable at its midpoint? The force F that an individual can pull with is estimated as F ∼ 0.45 kN [9]. Figure 8 shows the tension T created Elasticity and mechanical advantage in cables and ropes 725 in a cable as a function of κ obtained from equation (4) and the values of κ for several cables and ropes are indicated. Once T is obtained the mechanical advantage γ can be calculated and for an 11 mm static rope γ is 0.96 and no mechanical advantage is obtained. A steel cable gives a γ of 1.16 and a small mechanical advantage is obtained while a carbon rope results in a γ of 1.51 and a somewhat larger mechanical advantage is obtained. Thus, γ increases more slowly with κ for the car than it does for the tightrope. Insight into the slow increase of mechanical advantage with κ can be obtained by examining the topology of the γ surface of figure 4. γ as a function of t1 and f for the car is plotted as a line on this surface. This line angles off to one side of the steep maximum so that γ increases slowly with κ. Since f is likely to be varied in this set-up, it is of interest to look at γ as a function of f. For the case of the carbon nanotube cable, t1 = 12 kN/95 MN = 1.3 × 10−4 and a plot of γ versus f is shown in figure 5 for this value of t1. This plot has a maximum value of γ of 5.5 at a value of f of 2.5 × 10−4. However the actual value of f for the car is 0.45 kN/95 MN = 4.7 × 10−6, well away from the position of the maximum in γ . 6.3. Pulling a raft off a rock Occasionally a whitewater raft on a river can be pinned against a rock by the force of moving water. The raft crew (∼6) with a pulley system can create a tension T1 of ∼7 kN in a rope connected to the raft [9]. It has been suggested that further mechanical advantage can be gained by tying the rope off and pulling sideways on it [10]. To examine this, we estimate the perpendicular force that a team of six people (a raft crew) can apply as F ∼ 6 × 0.45 kN = 2.7 kN. Figure 8 shows T versus κ obtained by solving equation (4) for the raft. Calculated values of γ for the static rope, steel cable and carbon rope are 0.80, 2.98 and 4.82 respectively. Thus while no mechanical advantage is obtained for the static rope, significant mechanical advantage is obtained for the steel cable and carbon rope. 7. Conclusions When a perpendicular force F is applied at the midpoint of a cable or rope, mechanical advantage can only be obtained if T1 < T1c (T1c = κ t1c, t1c = 0.0340) and then only over a range of values of F. If T1 T1c, mechanical advantage cannot be obtained for any value of F assuming Hooke’s law is obeyed. For static ropes used in climbing and river rescue, no significant mechanical advantage can be obtained over the range of tensions for which these ropes are normally used. Generally, for stiff objects such as steel cables and theoretical carbon nanotube ropes (diameter 11 mm) κ is large enough such that significant mechanical advantage can be obtained. Programs to solve equation (4) and to solve equations (11) and (12) of this work are available at the electronic version of this journal (see stacks.iop.org/EJP/28/715). Acknowledgments We thank Larry Weaver for a critical reading of this manuscript. This work was supported by the KSU-PDS partnership project funded by the US Department of Education. 726 M J O’Shea Figure 9. Solution to the cubic equation for f, equation (A.1). The full line represents the real solutions and the dotted lines represent the real part of the imaginary solutions. The dashed circle shows the region reproduced in figure 3. Appendix Substituting t = t1 + f (γ = 1) in equation (5) and rearranging gives the cubic equation f 3 + 2f 2 (7t1 + 3)/3 + f 19t12 + 14t1 − 1 3 + 8 t13 + t12 3 = 0 (γ = 1). (A.1) Coefficients ai are defined by a comparison to f 3 + a1 f 2 + a2 f + a3 = 0. We then define [11] Q ≡ 3a2 − a12 9 = − 25t12 + 42t1 + 45 (9)2 R ≡ 9a1 a2 − 27a3 − 2a13 54 = − 125t13 + 315t12 + 567t1 + 297 (27)2 and obtain the discriminant D: D = Q3 + R 2 = 4 25t14 + 76t13 + 122t12 + 84t1 − 3 (3 × 272 ). (A.2) While polynomials with terms up to t16 are obtained for Q3 and R2, cancellation of the coefficients of t16 and t15 lead to a polynomial of order t14 for D. D is zero when t1 = −1.322 896 94 or 0.033 999 43 and D < 0 in this interval. We define the upper end of the interval as t1c = 0.0340 (rounded to three significant digits). For this problem F, T and T1 and their reduced values may not take on negative values. The solutions of equation (A.1) are summarized in figures 3 and 9. We consider three ranges of t1. • 0 t1 < t1c: here D < 0 and equation (A.1) has three real solutions [11] given by equations (6) and (A.3): ϕ 2(7t + 3) 1/2 2 1 − . (A.3) fnegative = − 25t12 + 42t1 + 45 cos 9 3 9 The quantity cos ϕ is given by equation (7). The first two solutions, equation (6), are both positive and describe the upper and lower parts of a contour, shown as a solid line in figure 3. The third solution, equation (A.3), is negative and is not relevant to this problem. • t1 = t1c: here D = 0 and two distinct real solutions exist. One is positive while the other is negative and is not relevant to this problem. The positive one corresponds to the point (t1c, fc) where the two positive solutions given by equation (6) meet and is a mathematical critical point. The f coordinate of this point is determined from 2 1/2 + 42t1c + 45 × (−0.5) − 2(3 + 7t1c )/9 = 0.037 78. fc = −(2/9) 25t1c (A.4) Elasticity and mechanical advantage in cables and ropes 727 • t1 > t1c: here D > 0 and there is only one real solution for f. This solution turns out to be negative and so is not relevant to this problem. References [1] Halliday D, Resnick R and Walker J 2005 Fundamentals of Physics 7th edn (Hoboken, NJ: Wiley) chapter 12, problem 10 [2] Giancoli D C 2005 Physics 6th edn (Englewood Cliffs, NJ: Prentice Hall) chapter 9, problems 24, 65 and 79 [3] Kaye G W C and Laby T H 1986 Tables of Physical Constants 15th edn (New York: Longman) pp 32–4 Gray D E 1972 American Institute of Physics Handbook 3rd edn (New York: McGraw Hill) section 2, p 66 [4] Vollrath F and Knight D P 2001 Liquid crystalline spinning of spider silk Nature 410 541–8 [5] Treacy M M J, Ebbesen T W and Gibson J M 1996 Exceptionally high Young’s modulus observed for individual carbon nanotubes Nature 381 678–80 [6] Ruoff R S 2006 Time, temperature, and load: the flaws of carbon nanotubes Science 103 6779–80 [7] Dalton A B, Collins S, Muñoz E, Razal J M, Ebron V H, Ferraris J P, Coleman J N, Kim B G and Baughman R H 2003 Supertough carbon-nanotube fibres Nature 423 703 [8] Long J 1993 Rock Climb! 2nd edn (Evergreen, CO: Chockstone Press) p 65 (bottom) [9] O’Shea M J 2006 Fluid flow, Newton’s second law and river rescue Phys. Educ. 41 137–43 [10] Bechdel L and Ray S 1985 River Rescue (Boston, MA: Appalachian Mountain Club) p 127 [11] Beyer W H 1987 Handbook of Mathematical Sciences 6th edn (Boca Raton, FL: CRC Press) pp 31–2