4801 - International Conference on Noise and Vibration Engineering
advertisement

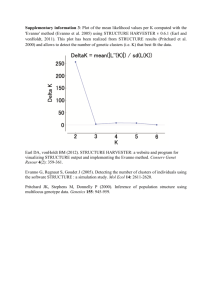
Comparison of Linear and Nonlinear Energy Harvesting Strategies with Uncertainty B.P. Mann 1 , D.A.W. Barton 2 1 Duke University, Department of Mechanical Engineering & Material Science, Durham, NC 27708, USA e-mail: brian.mann@duke.edu 2 University Bristol, Department of Engineering Mathematics, Bristol, U.K. Abstract The present article investigates how linear and nonlinear energy harvesting strategies are affected by uncertainties. Comparisons are made between a prototypical harvester - one that uses a linear oscillator and electromagnetic induction for energy conversion - and the same system with different types of nonlinear restoring forces. The dimensionless equations are used for each of these systems to generalize the results that elucidate which types of strategies are more robust to uncertainty. 1 Introduction The success of portable electronics and remote sensing devices is dependent upon the availability of remote power. While batteries can sometimes fulfill this role over short time intervals, they are often undesirable due to their finite life span, need for replacement and environmental impact. Instead, researchers are now investigating methods of scavenging energy from the environment to eliminate the need for batteries or to prolong their life [1]. While solar, chemical and thermal sources of energy transfer are sometimes viable, many have recognized the abundance of environmental disturbances that cause either rigid body motion or structural vibrations. This has led to a dramatic increase in the number of studies for vibration-based energy harvesting. While the research over the past decade has primarily focused on inertial generators that operate in a linear regime, recent work suggests that designing a harvester to operate in a nonlinear regime can improve the harvesters performance [2]. More specifically, several research groups are now investigating the use of nonlinearities to extend the bandwidth, broaden the frequency spectrum, and/or to facilitate tuning. These efforts take aim at overcoming the limitations of linear devices, which only perform well for a narrow band of frequencies [2]. The output power is one of the most important measures of performance. It is most often reported as the peak power, the average peak power, or the peak power divided by one or more quantities - such as the volume or the base acceleration. Despite the fact that recent efforts have begun to question whether a linear or nonlinear strategy should be used, little to no work has appeared to quantify the affect that uncertainties in the physical parameters have on the uncertainty in the output power. However, many sources of uncertainty exist - such as uncertainties in the lowest natural frequency, damping, excitation source, and physical dimensions that can dramatically alter the performance. This has motivated the authors to consider the question of whether a measure of robustness should accompany the typically reported values of peak performance. The present article investigates how linear and nonlinear energy harvesting strategies are affected by uncertainties. Comparisons are made between a prototypical harvester - one that uses a linear oscillator and 4801 4802 P ROCEEDINGS OF ISMA2010 INCLUDING USD2010 electromagnetic induction for energy conversion - and the same system with different types of nonlinear restoring forces. The dimensionless equations are used for each of these systems to generalize the results that elucidate which types of strategies are more robust to uncertainty. This content of this paper is organized as follows. The next section derives and non-dimensionalizes the math model under the consideration of a generic restoring force. Approximate analytical solutions are then used to obtain the frequency response of the system for various types of restoring forces. In particular, we derive approximate analytical solutions for the frequency response and average power delivered to an electrical load for the following types of restoring forces: 1) linear, 2) hardening and softening, 3) bistable potential wells, and 4) linear with a double-impact barrier. The responses of these systems are then compared for the case when all of the system and excitation parameters are precisely known; this is followed by a section that uses uncertainty propagation to explore the robustness of each type of restoring force. 2 Energy harvester model This section derives the dimensionless equations that govern the behavior of the harvesters under consideration. Since the goal is to consider a prototypical device that uses electromagnetic induction for energy conversion, the final governing equations are reminiscent of the equations given in references [?, ?, ?, ?]. However, we present an energy formulation and use a generic functional for the restoring forces to aid in the analyses that follow. i=dq/dt co V=Θy Figure 1: Illustration of a prototypical energy harvester that uses electromagnetic induction for energy conversion. Illustration (a) shows the oscillating magnet with a nonlinear restoring force and linear viscous damping whereas (b) shows the schematic for the electrical circuit. 2.1 Electromagnetic induction harvester The kinetic energy of the energy of the coupled electromechanical system can be expressed as 1 1 T = mẋ2 + Lq̇ 2 + Θ̂q̇y , (1) 2 2 where ẋ is the velocity of the inertial mass m, L is the inductance, q is a generalized charge coordinate, y = x−z is the relative velocity between mass and base, and Θ̂ is the coupling coefficient of the electromechanical transducer [?]. The dissipative function of the system is 1 D = co ẏ 2 + (RL + Ri ) q̇ 2 (2) 2 A PPLICATIONS 4803 where co is a constant used to described the mechanical damping, Ri is the internal resistance of the coil and RL is the resistance of the external load. The potential energy of the system can be described by the integral Z y χ(y)dy , (3) U= 0 of the restoring force χ(y). Here, we have written the restoring force as an arbitrary function since we will examine linear and several types of nonlinear restoring forces. Choosing q as an independent coordinate and applying Lagrange’s equation gives the governing equation for the electrical circuit Lq̈ + q̇ (RL + Ri ) + Θ̂ẏ = 0 . (4) Similarly, choosing y as a generalized coordinate and substituting x = y + z into Eq. (1) gives the governing equation for the mechanical system mÿ + co ẏ + χ(y) − q̇ Θ̂ = −mz̈ , (5) U (y ) (a) χ (y ) after applying Lagrange’s equation. (b) 0 U (y ) (c) χ (y ) 0 (d) 0 χ (y ) U (y ) 0 (e) (f) 0 U (y ) (g) 0 y χ (y ) 0 (h) 0 y Figure 2: Illustrations of the potential energy (left column) and corresponding restoring forces (right column) considered in the present study. Starting with the top row and progressing to the bottom row, the graphs show linear, hardening, softening, bistable, and bilinear potential energy curves and restoring forces. In the analyses that follow, we consider the five types of restoring forces shown in Fig. 2; these cases represent a linear, hardening, softening, bistable, and bilinear restoring forces. The first four cases can be written with 4804 P ROCEEDINGS OF ISMA2010 INCLUDING USD2010 the cubic polynomial χ(ŷ) = ±k ŷ ± k3 ŷ 3 , where the signs in front of k and k3 are altered to create each type of restoring force. The details for the final case, the bilinear system, are described within Section ??.p For the sake of analytical convenience, Eq. (4) and Eq. (5) were non-dimensionalized by substituting ω = k/m, τ = ωt, y = y`, z = z`, and q̇ = im I, where τ is dimensionless time, ` is the maximum displacement allowed by physical constraints, and im is a threshold or reference current. The dimensionless electrical equation becomes I 0 + ρI + θy 0 = 0 , (6) where a dot denotes a derivative with respect to dimensionless time and the dimensionless constants, ρ= RL + Ri ωL and θ= ` Θ̂ , im L (7) have been defined in terms of the original physical parameters. Before unveiling the dimensionless form of the mechanical equation, we introduce harmonic base excitation into the governing equation z̈ = −A sin Ωt, where Ω represents the excitation frequency and A the acceleration amplitude. The dimensionless mechanical equation becomes y 00 + µy 0 + χ(y) − θI = Γ sin ητ , (8) where the undefined constants are co µ= , mω L = m im ω` 2 L = k im ` 2 , Γ= A . `ω 2 (9) In the analyses that follow, the frequency response for Eqs. (6) and (8) will be derived for each type of restoring force. The amplitude of the responses, along with the average power delivered to an electrical load, are then compared for the nominal case. An uncertainty analyses is then used to compare each type of phenomena and ascertain which nonlinear phenomena is more robust to small uncertainties in the excitation and physical parameters. 3 Theoretical analysis This section derives the frequency responses of the mechanical and electrical systems to compare the average power harvested. To make these comparisons, an expression for the average power is formed by integrating the dimensionless form of the instantaneous power P = ρI 2 over the period of the excitation Pa = 1 T Z 0 T ρI 2 dt , (10) where T = 2π/η is the period of the excitation source. Although this expression assumes an ideal transducer, where the internal resistance is zero Ri = 0, there is no loss of generality since the actual power delivered to the resistive load would augment all of the cases studied by the same fraction. 3.1 Frequency response for hardening, softening, and linear harvester cases This section derives the frequency response for the hardening, softening, and linear restoring force cases. These cases can be represented by y 00 + µy 0 + y + βy 3 − θI = Γ sin ητ , (11) where the value of β is used to recover: 1) the linear case when β = 0, 2) a hardening spring when β > 0, or 2) a softening spring when β < 0. A solution to Eqs. (??) and (6) was assumed in the form of a A PPLICATIONS 4805 truncated Fourier series with slowly varying coefficients y = a(τ ) cos ητ +b(τ ) sin ητ and I = c(τ ) cos ητ + d(τ ) sin ητ ; the necessary derivates of the assumed solution expressions are y 0 = a0 + bη cos ητ + b0 − aη sin ητ , (12a) I 0 = c0 + dη cos ητ + d0 − cη sin ητ , (12b) (12c) y 00 = 2b0 − aη η cos ητ − bη + 2a0 η sin ητ , where a00 = b00 = 0, which is consistent with the slowly varying assumption. The expressions for y, y 0 , y 00 , I, and I 0 were then returned to Eq. (6) and Eq. (11); the coefficients of cos ητ and sin ητ were then balanced on each side of the equation to obtain c0 + θa0 = −ρc − ηd − θηb , 0 (13a) 0 d + θb = −ρd + ηc + θηa , 3 2 0 0 2 µa + 2ηb = a η − 1 − β r − µηb + θc , 4 3 2 0 0 2 −2ηa + µb = b η − 1 − β r + µηa + θd + Γ , 4 (13b) (13c) (13d) where r2 = a2 + b2 . The steady-state amplitude of the periodic response is obtained from the fixed points of Eqs. (13a)–(13d), which requires a0 = b0 = c0 = d0 = 0. After setting these terms to zero, the coefficients for the assumed solution of the electrical equation to be written in terms of the coefficients of the displacement; rearranging Eqs. (13a) and (13b) gives the following: c̃ = − ρ2 θη (ηã + ρb̃) + η2 d˜ = and ρ2 θη (ρã − η b̃) + η2 (14) where a (˜) has been used to represent the fixed point solutions. The expressions for c̃ and d˜ were then returned Eqs. (13c) and (13d) for c and d, respectively, along with a0 = b0 = 0, to obtain θ2 3 2 θ2 ρ 2 − 1 η + 1 + βr̃ ã + µ + 2 η b̃ = 0 , (15a) ρ2 + η 2 4 ρ + η2 θ2 3 2 θ2 ρ 2 − 1 η + 1 + βr̃ b̃ − µ + ηã = Γ , (15b) ρ2 + η 2 4 ρ2 + η 2 Squaring and adding these two equations gives the final expression for the frequency response for the hardening and softening cases 2 2 3 2 θ2 ρ θ2 2 2 − 1 η + 1 + βr̃ r̃ + µ + 2 η 2 r̃2 = Γ2 . (16) ρ2 + η 2 4 ρ + η2 To recover the frequency response of the linear harvester, β is set to zero in Eq. (16) and the quadratic equation is applied to solve for the amplitude of the frequency response r̃ = r 1+ θ2 ρ2 +η 2 Γ − 1 η2 2 + µη + θ2 ρη ρ2 +η 2 2 . (17) Although the frequency response expressions of Eqs. (16) and (17) provide the response amplitude of the mechanical system, the power is a betterpmetric for comparison. Recognizing that the square of the steadystate current amplitude is given by r̃e = c̃2 + d˜2 , we have applied Eq. (14) to write the steady-state current in terms of the response of the mechanical oscillator r̃e2 = θ2 η2 2 r̃ , + η2 ρ2 (18) 4806 P ROCEEDINGS OF ISMA2010 INCLUDING USD2010 5 0.4 3 0.3 r Pa 4 2 0.2 1 0.1 0 0 0.5 1 1.5 η 2 0.5 1 1.5 η 2 3 0.6 Pa Pa 2 1 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 1 2 Γ ρ 3 4 5 4 x 10 Figure 3: Response trends for the linear harvester. Graphs show frequency responses for (a) the oscillation amplitude of the mechanical system and (b) the dimensionless average power; graphs (c) and (d) plot the dimensionless average power for changes in Γ and ρ, respectively. In addition to µ = 0.01, β = 0, = 0.8, and θ = 10, the following parameters were applied: both (a) and (b) used Γ = 0.2 and ρ = 2500, (c) η = 1.0 and ρ = 2500, (d) η = 1.0 and Γ = 0.2. Inserting this expression into Eq. (10) gives the dimensionless average power in terms of the response amplitude of the mechanical oscillator 1 ρθ2 η 2 2 Pa = r̃ , (19) 2 ρ2 + η 2 where the explicit expression for r̃ depends on the type of restoring force. More specifically, Eq. (17) provides the response of the linear system whereas the hardening and softening cases require solving for the roots of Eq. (16). In addition, the mechanical response of the bistable and bilinear cases, which are examined in the upcoming sections, can also be inserted into Eq. (19) to make comparisons of the average power generate by the 1:1 response i.e. the response at the excitation frequency. 3.2 Bistable harvester analysis The dimensionless equation for a bistable oscillator that is coupled to the aforementioned electrical circuit is y 00 + µy 0 − y + βy 3 − θI = Γ sin ητ , (20) where β is a dimensionless constant for the bistable system. Unlike r the systems already examined, the 1 when β > 0. We therefore exbistable case has multiple stable equilibria, which are located at ye = ± β pect that small levels of excitation will cause relatively small oscillations around one of the stable equilibria. A PPLICATIONS 4807 3 0.4 0.3 r Pa 2 0.2 1 0.1 0 0 0.5 1 1.5 η 0.5 1 η 1.5 0.4 0.3 Pa Pa 0.1 0.2 0.05 0.1 0 0 0.1 0.2 0.3 Γ 0.4 0.5 1000 2000 3000 4000 5000 ρ Figure 4: Response trends of the harvester with a hardening nonlinearity. Graphs show frequency responses for (a) the oscillation amplitude of the mechanical system and (b) the dimensionless average power; graphs (c) and (d) plot the dimensionless average power for changes in Γ and ρ, respectively. In addition to µ = 0.01, β = 0.2, = 0.8, and θ = 10, the following parameters were applied: both (a) and (b) used Γ = 0.2 and ρ = 2500, (c) η = 1.2 and ρ = 2500, (d) η = 1.4 and Γ = 0.2. However, past research on bistable mechanical oscillators has shown a dramatic increase in the energy-level of the response once exceeding the threshold for a potential well escape. The approximate analytical solution can be derived by assuming a solution in the form of a truncated Fourier series with time varying coefficients y = p(τ ) + a(τ ) cos ητ + b(τ ) sin ητ ; the first and second derivates become y 0 = p0 + a0 + bη cos ητ + b0 − aη sin ητ , (21a) y 00 = 2b0 − aη η cos ητ − bη + 2a0 η sin ητ , (21b) where we have presumed that a00 = b00 = p00 = 0 owing to the slowly varying approximation. The expressions for y, y 0 , y 00 , I, and I 0 are then returned to Eqs. (20) and (6) where the constant coefficients, along with the coefficients of cos ητ , sin ητ , are balanced on each side. Balancing the constant coefficients gives 3 2 0 2 µp = p 1 − β p + r , (22) 2 4808 P ROCEEDINGS OF ISMA2010 INCLUDING USD2010 0.25 6 0.2 r Pa 4 0.15 0.1 2 0.05 0 0 0.5 1 1.5 η 0.5 0.25 1 η 1.5 0.3 0.15 Pa Pa 0.2 0.2 0.1 0.1 0.05 0 0 0.1 0.2 0.3 Γ 0.4 0.5 1000 2000 3000 4000 5000 ρ Figure 5: Response trends of the harvester with a softening nonlinearity. Graphs show frequency responses for (a) the oscillation amplitude of the mechanical system and (b) the dimensionless average power; graphs (c) and (d) plot the dimensionless average power for changes in Γ and ρ, respectively. In addition to µ = 0.01, β = −0.03, = 0.8, and θ = 10, the following parameters were applied: both (a) and (b) used Γ = 0.2 and ρ = 2500, (c) η = 0.85 and ρ = 2500, (d) η = 0.85 and Γ = 0.2. whereas balancing the coefficients of cos ητ and sin ητ gives 3 2 0 0 2 2 µa + 2ηb = a η + 1 − 3βp − βr − µηb + θc , 4 3 2 0 0 2 2 −2ηa + µb = b η + 1 − 3βp − βr + µηa + θd + Γ , 4 (23a) (23b) along with Eqs. (13a) and (13b). The steady-state response of the systems requires a0 = b0 = p0 = c0 = d0 = 0. After setting these terms to zero, the expressions for c̃ and d˜ were then returned Eqs. (23a) and (23b) for c and d, respectively, to obtain 3 2 θ2 ρ θ2 2 2 1− 2 η + 1 − 3β p̃ − βr̃ ã − µ + 2 η b̃ = 0 , (24a) ρ + η2 4 ρ + η2 θ2 3 2 θ2 ρ 2 2 η + 1 − 3β p̃ − βr̃ b̃ + µ + 2 ηã = −Γ . (24b) 1− 2 ρ + η2 4 ρ + η2 where a (˜) has been used to represent the fixed point solutions. Squaring and adding these two equations gives an expression for the frequency response of the mechanical system 2 2 θ2 3 2 θ2 ρ 2 2 2 1− 2 η + 1 − 3β p̃ − βr̃ r̃ + µ + 2 η 2 r̃2 = Γ2 (25) ρ + η2 4 ρ + η2 A PPLICATIONS 4809 where p̃ may take on multiple values. More specifically, after setting p0 = 0 in Eq. (22) and solving for 1 3 the steady-state solution, the fixed points p̃ = 0 and p̃2 = − r̃2 are obtained, where the latter solution β 2 2 restricts the values of r̃ that provide a physical solution for p̃ to r̃2 ≤ . The average power can now be 3β predicted by simply inserting the value obtained for r̃ into Eq. (19). 4 Comparison of response trends 5 0.4 4 0.3 r Pa 3 2 0.2 0.1 1 0 0 0.5 η 1 1.5 0.5 η 1 1.5 0.4 0.3 Pa Pa 0.3 0.2 0.1 0.2 0.1 0 0 0.5 1 1.5 Γ 2 2.5 3 0.5 1 1.5 ρ 2 2.5 3 Figure 6: Response trends for a harvester with a bistable potential well. Graphs show frequency responses for (a) the oscillation amplitude of the mechanical system and (b) the dimensionless average power; graphs (c) and (d) plot the dimensionless average power for changes in Γ and ρ, respectively. In addition to µ = 0.01, β = 0.09, = 0.8, and θ = 10, the following parameters were applied: both (a) and (b) used Γ = 0.2 and ρ = 2500, (c) η = 0.75 and ρ = 2500, (d) η = 0.9 and Γ = 0.2. This section compares the frequency and average power responses of the linear, hardening, softening, and bistable harvesters when there is no uncertainty in the system parameters. Starting with the linear system, Fig. 3 shows the amplitude of the mechanical oscillator’s response and the average power both peak the natural frequency. In addition, average power is shown to scale with the square of Γ and to deliver peak power to an electrical load for a single value of of ρ. By comparison, both the hardening and softening cases of Figs. 4 and 5 show peak responses away from the linear natural frequency. While both the hardening and softening cases reveal relatively larger responses over a broader range of frequencies, along with the coexistence of multiple stable periodic attractors, these response differ in several ways. For instance, the hardening response peaks with a stable periodic solution while the peak response for the softening system can sometimes be unstable. Another interesting aspect is that the relatively larger responses for both the 4810 P ROCEEDINGS OF ISMA2010 INCLUDING USD2010 hardening and softening system cease to exist for relatively lower ρ values. Perhaps the most interesting response behavior, with both intrawell and well mixing behavior, is shown by the results of Fig. 6. The frequency response trends show that the largest amplitude response actually occurs away from resonance and at frequencies below the natural frequency. For the cases studied, Pa also scales nonlinearly with respect to changes in Γ; it is believed that this nonlinear scaling could be a favorable trait of the bistable system since relatively larger levels of uncertainty in Γ would not cause significant changes in r. As in the previous nonlinear cases, the relatively large amplitude responses vanish for ρ values below some threshold. 5 Uncertainty analysis and constraints The previous section described response behaviors for the ideal cases, i.e. when there is no uncertainty associated with the model parameters or with the excitation source. The aim of this section is take a closer step towards reality and consider the how the performance of each harvester fairs when there is some uncertainty associated with the response of the system. Consider the case of an experimental result that is defined by the general expression f = f (x1 , x2 , . . . xN ) , (26) which is a function of N measured variables denoted by x1 –xN . The uncertainty in the result, Uf , is given by ∂f 2 2 ∂f 2 2 ∂f 2 2 2 Uf = UxN (27) Ux1 + U x2 + · · · + ∂x1 ∂x2 ∂xN where each Uxi represents the uncertainty in the measured variable xi . In Eq. (27), it is common to express the uncertainty at the same level of confidence (e.g. a 95% confidence level or 20:1 odds, are typically used). This will result in a 95% confidence level in Uf as well. The poster will present the propagation of uncertainty in all of the linear and nonlinear cases to elucidate the most robust phenomenon. Acknowledgements The first author would like to acknowledge financial support from Dr. Ronald Joslin through an ONR Young Investigator Award. The second author would like to acknowledge support from a Great Western Research Fellowship. References [1] S. Roundy, P. Wright, J. Rabaey, Energy Scavenging for Wireless Sensor Networks, Springer-Verlag, 2003. [2] B. Mann, N. Sims, Energy harvesting from the nonlinear oscillations of magnetic levitation, Journal of Sound and Vibration, 2009, 319, 515-530