neutron diffusion theory
advertisement

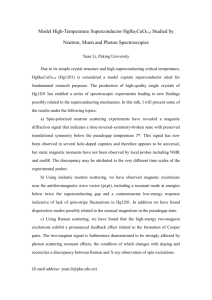
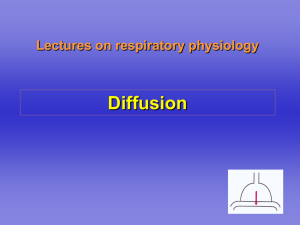
NEUTRON DIFFUSION THEORY © M. Ragheb 11/15/2014 1. INTRODUCTION The diffusion theory model of neutron transport plays a crucial role in reactor theory since it is simple enough to allow scientific insight, and it is sufficiently realistic to study many important design problems. The neutrons are here characterized by a single energy or speed, and the model allows preliminary design estimates. The mathematical methods used to analyze such a model are the same as those applied in more sophisticated methods such as multi-group diffusion theory, and transport theory. The derivation of the diffusion equation will depend on Fick’s law, even though a direct derivation from the transport equation is also possible. The Helmholtz equation is derived, and the limitations on diffusion equation as well as the boundary conditions used in its application to realistic engineering and physics problems are discussed. 2. TRANSPORT CROSS-SECTION The effect of the scattering angular distribution on the motion of a neutron is taken into account by use of the transport cross section. Let us assume: An infinite medium, 1. 2. A purely scattering medium without absorption, 3. The energy of the neutron does not change as a result of a collision with the nuclei of the medium, 4. After each collision the particle travels a scattering mean free path s and is deflected by the scattering angle . After injection to the system, the neutron moves a distance: Z 0 s (1) the projected distance traveled after the first collision along the z-axis is, as shown in Fig. 1: Z 1 s cos( 1 ) The average value of Z 1 is: Z 1 s cos( 1 ) s (2) where: and: 2 , 3A A is the mass number of the nuclei in the scattering medium. The distance traveled after the second collision is: Z 2 s cos(1 ).cos( 2 ) where the azimuthal angle ( ) scattering is isotropic. Figure 1. Geometry for the transport of a particle over three collisions. The average value of Z 2 is: 2 Z 2 s cos(1 ).cos( 2 ) s cos(1 ) s 2 (3) In general, for (n-1) collisions: Z n s n , for n=0, 1, 2, … (4) Since Z n 0 as n , this implies that the neutron could be scattered in either direction with equal probability, at its next collision. This means the neutron forgets its original direction of motion after a succession of collisions which is characteristic of Markov chains, and having been carried a distance of a transport mean free path: tr z 0 z 1 s n n 0 2 s (1 ) s 1 (5) , 1 The transport cross section is defined as: tr 1 tr s (1 ) (6) If absorption is present, we generalize the definition of transport cross section to be: tr a s (1 ) t s (7) where t is the total macroscopic cross section. 3. FICK’S LAW AND THE DIFFUSION APPROXIMATION The neutron flux ( ) and neutron current (J) are related in a simple way under certain conditions. This relationship between and J is identical in form to a law used in the study of diffusion phenomena in liquids and gases: Fick’s law. In Physical Chemistry, Fick’s law states that: “If the concentration of a solute in one region is greater than in another of a solution, the solute diffuses from the region of higher concentration to the region of lower concentration.” The use of this law in Reactor Theory leads to the Diffusion Approximation. Let us make the following assumptions: 1. 2. 3. 4. We consider an infinite medium, The cross sections are constants, independent of position, implying a uniform medium, Scattering is isotropic in the Laboratory (LAB) system, The neutron flux is a slowly varying function of the position, 5. We use a one speed system where the neutron density is not a function of time, 6. A steady state system where the neutron density is not a function of time, 7. No fission source in the system. Some of these assumptions will be later relaxed. For instance, the diffusing medium will be taken as finite in size rather than infinite. We shall attempt to calculate the current density at the center of the coordinate system of Fig. 2. The vector J is given by: J J x iˆ J y ˆj J z kˆ , (8) so that we must evaluate the components J x , J y , J z . Figure 2. Spherical geometry for the derivation of the neutron current and Fick’s Law. These net current components can be written in terms of the partial axial currents as: J x J x J x J y J y J y J z J z J z (9) Let us concentrate on the estimation of one single component: J z crossing the element of area dS z at the origin of the coordinate system in the negative z direction, as shown in Fig. 2. Every neutron passing through dS z in the x-y plane comes from a scattering collision. Neutron scattering above the x-y plane will thus flow downward through the element of area dS z . Consider the volume element: dV r 2 sin( )drd d (10) The number of scattering collisions occurring per unit time in the volume element dV is: s ( r )dV s ( r ) r 2 sin( )drd d where: (11) ( r ) is the particle flux, s is the macroscopic scattering cross section. Since scattering is isotropic in the LAB system, the fraction arriving to dS z is that subtended by the solid angle d , and is given by: dS d r 2 dS z cos( ) 4 4 r 2 (12) Thus the number of neutrons scattered per unit time in dV reaching dS z after being attenuated in the medium by the exponential factor e t r is: dN e t r ( r ) s r 2 sin( ) drd d dS z cos( ) 4 r 2 The partial current J z can now be written as: J z dN dS z / 2 2 e 4 s 0 0 ( r )sin( )cos( )dr d d t r (13) 0 Since (r ) is an unknown function, we expand it in a Taylor’s series assuming it varies slowly with position: ( r ) 0 x y z x 0 y 0 z 0 Writing x, y, and z in spherical coordinates: ( r ) 0 rsin( )cos( ) rsin( )sin( ) rcos( ) x 0 y 0 z (14) 0 Substituting Eq. 14 into Eq. 13, we get, J s 4 z 2 2 e 0 0 t r 0 rsin( )sin( ) r cos( ) 0 r sin( )cos( ) sin( ) cos( )drd d x y z 0 0 0 (15) The terms containing cos( ) and sin( ) integrate to zero over the angle 0, 2 interval, thus: J z s 4 / 2 2 e 0 0 0 r cos( ) z sin( )cos( ) drd d 0 t r 0 The first term can be evaluated as: / 2 2 I1 s 0 4 0 e 0 t r sin( )cos( ) drd d 0 s 1 1 0 2 4 t 2 1 s 0 4 t The second term also becomes: I2 s 4 z / 2 2 re 0 0 0 t r 0 s 1 1 2 2 4 z 0 t 3 1 s 6 t2 z 0 Thus Eq. 16 becomes: sin( )cos2 ( ) drd d (16) J z 1 s 1 s 0 4 t 6 t2 z 0 1 s 1 s 0 4 t 6 t2 z 0 (17) Similarly: J z (18) Substituting Eqs. 17 and 18 into Eq. 9, we can write: Jx Jy Jz 1 s 3 t2 x 0 1 s 3 t2 y 0 1 s 3 t2 z 0 (19) Substituting into Eq. 8, we get the expression for the current density after dropping the evaluation at the origin notation, since the origin of the coordinates is arbitrary: 1 s ˆ ˆ ˆ i j k y z 3 t2 x 1 s 1 s J grad 2 3 t 3 t2 J (20) We define the “diffusion coefficient”: D s 3 t2 (21) Thus Fick’s law for neutron diffusion is given by: J D (22) It states that the current density vector is proportional to the negative gradient of the flux, and establishes a relationship between them under the enunciated assumptions. Notice that the gradient operator turns the neutron flux, which is a scalar quantity into the neutron current, which is a vector quantity. 4. LIMITATIONS OF DIFFUSION THEORY Fick’s law expresses the fact that if the gradient of the flux is negative, then the current density is positive. This means that the particles will diffuse from the region of higher flux to the region of lower flux through collisions in the medium. Fick’s law imposes some limitations on the problems solved, because of the inherent assumptions, and it becomes invalid, needing corrections, under the following conditions: 1. Closeness to boundaries: The derivation assumed an infinite medium. For a finite medium, Fick’s law is valid only at points which are more than a few mean free paths from the edges of the medium. This is so, since the exponential term dies off quickly with distance, and only points of a few mean free paths from the point where the flux is computed make a significant contribution to the integral. 2. Proximity to sources or sinks: It was assumed that the contribution to the flux is mostly from scattering collisions. Sources can be present. Because of the attenuation factor, however, a small number of the source neutrons will contribute to the flux if they are more than a few mean free paths from sources. 3. Anisotropic LAB system scattering: Isotropic scattering in the LAB system occurs at low energies, but is not true in general. However, Fick’s law is still valid with moderate anisotropy in scattering, if a modified form of the diffusion coefficient is used, based on transport theory. Such an expression for D is given by: D 1 4 a 3 s (1 )1 5 t (23) If a t Eq, 23 reduces to: D since: where: 1 3 s (1 ) s (1 ) tr 1 tr , 3 3 tr 1 , tr tr is the transport mean free path defined earlier. 4. Highly absorbing media: (24) The flux was expanded in a Taylor’s series and was assumed as slowly varying. The flux however changes rapidly in strongly absorbing media. Thus Fick’s law applies to systems in which: a s When absorption is present, D should be computed using Eq. 23 and not Eqs. 24 or 21. 5. Proximity to interfaces: The assumption of a uniform medium was used in the derivation of Fick’s law. At the boundary between two media of different scattering properties, Fick’s law is still valid, provided that the sharp change does not lead to a rapidly varying flux, which invalidates the Taylor’s series expansions of the flux in the derivation. In fact, the second order derivatives, either integrate to zero, or cancel out in their contribution to J z . The third derivatives do in fact contribute to the integral of J . Thus Fick’s law would be valid if the second derivative of the flux does not vary appreciably. 6. Rapidly time-varying flux It was assumed that the flux is independent of time. It is possible to relax this requirement if the change in is small during the time for a neutron to travel a few mean free paths. If the slow neutrons in a reactor have velocity of v 10 5 cm/sec, and their travel over three scattering mean free paths, then we can state that the time variation of the flux must satisfy the condition: d dt 3s 3s 5 [sec] v 10 which states that the time needed for the neutron to travel three mean free paths is smaller than the characteristic time for the neutron flux variation. 5. DERIVATION OF THE NEUTRON DIFFUSION EQUATION To derive the neutron diffusion equation we adopt the following assumptions: 1. We use a one-speed or one-group approximation where the neutrons can be characterized by a single average kinetic energy, 2. We characterize the neutron distribution in the reactor by the particle density n(r,t) which is the number of neutrons per unit volume at a position r at time t. Its relationship to the flux is: r,t vn( r, t ) We consider an arbitrary volume V and write the balance equation: Time rate of change of the number of = Production rate - Absorptions - Net leakage from in V the surface of V in V neutrons in V The first term is expressed mathematically as: d 1 1 d n( r, t ) dV ( r, t ) dV ( r, t ) dV dt V dt V v v V t The production rate can be written as: S (r, t ) dV V The absorption term is: (r) (r, t ) dV a V and the leakage term is: J (r, t ) nˆ ds J (r, t ) dV s V where we converted the surface integral to a volume integral by use of Gauss’ Theorem or the divergence theorem. Substituting for the different terms in the balance equation we get: 1 ( r, t ) dV S ( r, t ) dV a ( r ) ( r, t ) dV J ( r, t ) dV t V V V v V or: 1 ( r, t ) S a J dV 0 t V v Since the volume V is arbitrary we can write: (25) 1 ( r, t ) J a S v t (26) We now use the relationship between J and (Fick’s law) to write the diffusion equation: 1 ( r, t ) D( r ) ( r, t ) a ( r ) ( r, t ) S ( r, t ) v t (27) This equation is the basis of much of the development in reactor theory using diffusion theory. 6. THE HELMHOLTZ EQUATION The diffusion equation (27) is a partial differential equation of the parabolic type. It also describes physical phenomena in heat conduction, gas diffusion, and material diffusion. This equation simplifies in case the medium is uniform or homogeneous such that D and a do not depend on the position r as: 1 ( r, t ) D2 ( r, t ) a ( r, t ) S ( r, t ) v t (28) where we used the fact that the divergence of the gradient leads to the Laplacian operator: . 2 The Laplacian Operator 2 depends on the coordinate system used: 2 2 2 x 2 y 2 z 2 Cartesian: 2 Cylindrical: 1 1 2 2 r r r r r 2 2 z 2 Spherical: 2 2 2 1 2 1 1 sin( ) r r 2 sin 2 ( ) 2 r 2 r r r 2 sin( ) (29) (30) (31) In case of symmetry around the angular variables and , these equations simplify in the one dimensional case into: 2 where: 1 d d r r dr dr = 0, for the cartesian coordinates, = 1, for the cylindrical coordinates, = 2, for the spherical coordinates, and the partial derivative has been replaced by the total derivative. When the flux is not a function of time, we use the steady state diffusion equation, or the scalar Helmholtz equation; D 2 a S 0 (32) which is a partial differential equation of the elliptic type. The Helmholtz equation can be written as: 2 ( r ) 1 S (r) (r) 2 L D (33) D , L is the diffusion length. a If on the other hand, the neutron density and flux are independent of position, we can write from Eqs. 28; considering div J 0 : where L2 1 d (t ) S (t ) a (t ) v dt (34) which is a time dependent equation in the flux. 7. BOUNDARY CONDITIONS FOR THE STEADY-STATE DIFFUSION EQUATION Mathematically, for the Helmholtz equation the following boundary conditions are needed: either or the normal derivative , or a linear combination of the two must be n specified. Both and cannot be specified independently. Normally, boundary conditions are n specified based on physical arguments that do not violate this condition. 1. Vacuum Boundary Conditions: The mean free path of neutron in air is much larger than in the reactor, so that it is possible to treat it as a vacuum in reactor calculations. If we consider no neutrons reflected from the vacuum back to the reactor core (Fig. 3), then we can write the equivalent to Eq. 17: J ( x) 1 s 1 s 0 0 4 t 6 t 2 x 0 (35) Recalling that from the Fick’s law derivation, D s 3 t 2 we can write: J ( x) 1 s D 0 0 4 t 2 x 0 (36) From which: 1 1 s 0 x 0 2 D t (37) If at the boundary the material is mostly a scatterer a t , then s can substitute for D tr 3 t 1 , and we : 1 1 3 1 0 x 0 2D 2 tr (38) However from the geometry of Fig. 3, if the diffusion theory is linearly extrapolated, we can write: 0 d tan( ) x (39) 0 where d is the “extrapolated length”. Comparing Eqs. 38 and 39, we get: 1 3 1 1 0 x 0 2 tr d from which: d 2 tr 3 (40) More detailed analyzes give more complicated expressions for d in the situation of curved boundaries. For instance, for plane geometry, it is given by: d 0.7104 tr (41) The boundary condition is now enunciated as: “The flux vanishes at the extrapolated distance beyond the edge of the reactor surface”, or: (R d ) 0 (42) where R is the reactor radius. Figure 3. Geometry for the estimation of the extrapolation length in diffusion theory. 2. Interface boundary conditions: The flux is continuous across the boundary between two different media A and B: A int erface B int erface (43) and the normal components of the current density at the boundary should be equal: J An int erface JBn int erface (44) 3. Physical requirements boundary conditions: The solution to the diffusion equation must be real, non-negative, and single valued: 0 (45) Also, the solution to the diffusion equation must be finite in those regions where the equation is valid except, but not necessarily, at singular points of the source distribution: (46) These conditions can be used to eliminate unnecessary functions from the solutions. This paves the way for the calculations of flux and power distributions in practical reactor design situations. REFERENCES 1. M. Ragheb, “Lecture Notes on Fission Reactors Design Theory,” FSL-33, University of Illinois, 1982. 2. J. R. Lamarsh, “Introduction to Nuclear Engineering,” Addison-Wesley Publishing Company, 1983.