Chapter 3 Mechanical Systems
advertisement

ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Chapter 3
Mechanical Systems
Dr. A.Aziz. Bazoune
3.1 INTRODUCTION
Mathematical Modeling and response analysis of mechanical systems are the subjects
of this chapter.
3.2 MECHANICAL ELEMENTS
Any mechanical system consists of mechanical elements. There are three types of
basic elements in mechanical systems:
¾
¾
¾
Inertia elements
Spring elements
Dampers elements
Inertia Elements. Mass and moment of inertia. Inertia may be
defined as the change in force (torque) required to make a unit change in
acceleration (angular acceleration). That is,
inertia (mass) =
change in force
N
change in acceleration
m/s
inertia (moment of inertia) =
2
or
kg
change in torque
N-m
change in ang. accel.
rad/s
2
or
kg
Spring Elements.
A linear spring is a mechanical element that can
be deformed by external force or torque such that the deformation is directly
proportional to the force or torque applied to the element.
Translational Springs
For translational motion, (Fig 3-1(a)), the force that arises in the spring is
proportional to x and is given by
F = kx
(3-1)
where x is the elongation of the spring and k is a proportionality constant called
the spring constant and has units of [force/displacement]=[N/m] in SI units.
1/34
ME 413 Systems Dynamics & Control
At point
at point
Chapter Three: Mechanical Systems
P , the spring force F
P.
X
P
acts opposite to the direction of the force
f
f
x2
P
Q
f
X+x1 −x2
(a) One end of the spring is deflected; (b) both ends of the spring are
deflected. ( X is the natural length of the spring)
Figure 3-1(b) shows the case where both ends
deflected due to the forces
is
applied
X + x1
X+x
Figure 3-1
F
f
P
and
Q
of the spring are
applied at each end. The net elongation of the spring
x1 − x2 . The force acting in the spring is then
F = k ( x1 − x2 )
Notice that the displacement
X + x1
and
x2
of the ends of the spring are measured
relative to the same reference frame.
Practical Examples.
Pictures of various types of real-world springs are found below.
2/34
(3-2)
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Torsional Springs
Consider the torsional spring shown in Figure 3-2 (a), where one end is fixed
and a torque τ is applied to the other end. The angular displacement of the free
end is
θ . The torque T
in the torsional spring is
T = kT θ
where
θ
(3-3)
is the angular displacement and
kT
is the spring constant for
torsional spring and has units of [Torque/angular displacement]=[N-m/rad] in SI
units.
θ
θ1
θ2
τ
τ
τ
Figure 3-2
(a) A torque τ is applied at one end of torsional spring, and the other
end is fixed; (b) a torque τ is applied at one end, and a torque τ , in
the opposite direction, is applied at the other end.
At the free end, this torque acts in the torsional spring in the direction opposite to
that of the applied torque τ .
For the torsional spring shown in Figure 3-2(b), torques equal in magnitude
but opposite in direction, are applied to the ends of the spring. In this case, the
torque
T
acting in the torsional spring is
T = kT (θ1 − θ 2 )
(3-4)
At each end, the spring acts in the direction opposite to that of the applied torque at
that end.
For linear springs, the spring constant
spring constant k =
1442443
for translational spring
for torsional spring
may be defined as follows
change in force
N
change in displacement of spring
m
spring constant kT =
1442443
k
change in torque
N-m
change in angular displacement of spring
rad
Spring constants indicate stiffness; a large value of
hard spring, a small value of
k
or
kT
k
or
kT
corresponds to a
to a soft spring. The reciprocal of the spring
3/34
ME 413 Systems Dynamics & Control
constant
k
Chapter Three: Mechanical Systems
is called compliance or mechanical capacitance
C.
Thus
C =1 k.
Compliance or mechanical capacitance indicates the softness of the spring.
Practical Examples.
Pictures of various types of real-world springs are found below.
http://www.esm.psu.edu/courses/emch13d/design/animation/animation.htm
Practical spring versus ideal spring. Figure 3-3 shows
displacement characteristic curves for linear and nonlinear springs.
•
•
All practical springs have inertia
and damping.
the
force
F
An ideal spring has neither mass
nor damping (internal friction)
and will obey the linear force
displacement law.
o
Figure 3-3 Force-displacement
characteristic curves for linear and
nonlinear springs.
x
Damper Elements. A damper is a mechanical element that dissipates
energy in the form of heat instead of storing it. Figure 3-4(a) shows a schematic
diagram of a translational damper, or a dashpot that consists of a piston and an-oilfilled cylinder. Any relative motion between the piston rod and the cylinder is resisted
4/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
by oil because oil must flow around the piston (or through orifices provided in the
piston) from one side to the other.
x1
x2
x& 1
x& 2
f
θ&2
f
Figure 3-4
θ&1
τ
τ
(a) Translational damper; (b) torsional (or rotational) damper.
Translational Damper
In Fig 3-4(a), the forces applied at the ends of translation damper are on the
same line and are of equal magnitude, but opposite in direction. The velocities of the
ends of the damper are
same frame of reference.
x&1
and
x& 2 . Velocities x&1
F
In the damper, the damping force
velocity differences
x&1 − x& 2
and
x& 2
are taken relative to the
that arises in it is proportional to the
of the ends, or
F = b ( x&1 − x& 2 ) = bx&
where
x& = x&1 − x& 2
and the proportionality constant
to the velocity difference
x&
b
(3-5)
relating the damping force
F
is called the viscous friction coefficient or viscous
friction constant. The dimension of
b
is [force/Velocity] = [N-s/m] in SI units.
Torsional Damper
For the torsional damper shown in Figure 3-4(b), the torques τ applied to
the ends of the damper are of equal magnitude, but opposite in direction. The
θ&2
and they are taken
relative to the same frame of reference. The damping torque
the
angular velocities of the ends of the damper are
θ&1
and
T that arises in
&
&
damper is proportional to the angular velocity differences θ1 − θ 2 of the ends, or
(
)
T = bT θ&1 − θ&2 = bTθ&
where, analogous to the translation case,
constant
bT
relating the damping torque
5/34
T
θ& = θ&1 − θ&2
(3-6)
and the proportionality
to the angular velocity difference
θ&
is
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
called the viscous friction coefficient or viscous friction constant. The
dimension of
b
is [torque/angular velocity] = [N-m-s/rad] in SI units.
A damper is an element that provides resistance in mechanical motion, and,
as such, its effect on the dynamic behavior of a mechanical system is similar to that
of an electrical resistor on the dynamic behavior of an electrical system.
Consequently, a damper is often referred to as a mechanical resistance element
and the viscous friction coefficient as the mechanical resistance.
Practical Examples.
Pictures of various examples of real-world dampers are found below.
Practical damper versus ideal
damper
•
•
All practical dampers produce inertia
and spring effects.
An ideal damper is massless and
springless, dissipates all energy, and
obeys the linear force-velocity law (or
linear torque-angular velocity law).
Nonlinear friction.
Friction that obeys a linear law is called linear
friction, whereas friction that does not is
described as nonlinear. Examples of nonlinear
friction include static friction, sliding friction,
and square-law friction. Square law-friction
occurs when a solid body moves in a fluid
medium. Figure 3-5 shows a characteristic
curve for square-law friction.
6/34
Figure 3-5
Characteristic curve
for square-law friction.
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
3.3 MATHEMATICAL
MODELING
MECHANICAL SYSTEMS
OF
SIMPLE
A mathematical model of any mechanical system can be developed by applying
Newton’s laws to the system.
Rigid body.
When any real body is accelerated , internal elastic
deflections are always present. If these internal deflections are negligibly small
relative to the gross motion of the entire body, the body is called rigid body. Thus,
a rigid body does not deform.
Newton’s laws.
Newton’s first law: (Conservation of Momentum)
The total momentum of a mechanical system is constant in the absence of
external forces. Momentum is the product of mass m and velocity v , or m v , for
translational or linear motion. For rotational motion, momentum is the product of
moment of inertia
J
and angular velocity
ω,
or
Jω ,
and is called angular
momentum.
Newton’s second law:
Translational motion: If a force is acting on rigid body
through the center of mass in a given direction, the acceleration of the rigid body in
the same direction is directly proportional to the force acting on it and is inversely
proportional to the mass of the body. That is,
acceleration =
or
force
mass
( mass ) ( acceleration ) = force
Suppose that forces are acting on a body of mass m . If
∑F
is the sum of all
forces acting on a mass m through the center of mass in a given direction, then
∑F = m a
(3-7)
where a is the resulting absolute acceleration in that direction. The line of action of
the force acting on a body must pass through the center of mass of the body.
Otherwise, rotational motion will also be involved.
Rotational motion. For a rigid body in pure rotation
about a fixed axis, Newton’s second law states that
7/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
( moment of inertia ) ( angular acceleration ) = torque
or
∑T = J α
where
∑T
is the sum of all torques acting about a given axis,
inertia of a body about that axis, and
α
(3-8)
J
is the moment of
is the angular acceleration of the body.
Newton’s third law. It is concerned with action and reaction
and states that every action is always opposed by an equal reaction.
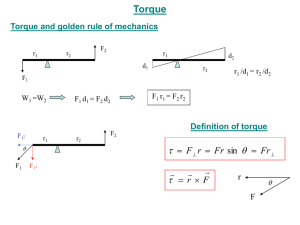
Torque or moment of force.
Torque, or moment of force, is
defined as any cause that tends to produce a change in the rotational motion of a
body in which it acts. Torque is the product of a force and the perpendicular distance
from a point of rotation to the line of action of the force.
⎡⎣Torque ⎤⎦ = [ force × distance ] = [ N-m ] in SI units
Moments of inertia. The moment of inertia J of a rigid body about an
axis is defined by
J = ∫ r 2 dm
(3-9)
Where dm is an element of mass, r is the distance from axis to dm , and integration
is performed over the body. In considering moments of inertia, we assume that the
rotating body is perfectly rigid. Physically, the moment of inertia of a body is a
measure of the resistance of the body to angular acceleration.
Figure 3-6
Moment of inertia
Parallel axis theorem.
Sometimes it is necessary to calculate the
moment of inertia of a homogeneous rigid body about an axis other than its
geometrical axis.
8/34
ME 413 Systems Dynamics & Control
Figure 3-7
Chapter Three: Mechanical Systems
Homogeneous cylinder rolling on a flat surface
As an example to that, consider the system shown in Figure 3-7, where a cylinder of
mass m and a radius R rolls on a flat surface. The moment of inertia of the cylinder
is about axis CC’ is
Jc =
1
mR2
2
The moment of inertia J x of the cylinder about axis xx’ is
Jx = Jc + m R 2 =
1
3
mR2 + mR2 = mR2
2
2
Forced response and natural response. The
behavior
determined by a forcing function is called a forced response, and that due initial
conditions is called natural response. The period between initiation of a response and
the ending is referred to as the transient period. After the response has become
negligibly small, conditions are said to have reached a steady state.
Figure 3-8
Transient and steady state response
Parallel and Series Springs Elements.
In many
applications, multiple spring elements are used, and in such cases we must obtain
the equivalent spring constant of the combined elements.
9/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Parallel Springs.
3-9, the equivalent spring constant
keq
For the springs in parallel, Figure
is obtained from the relation
x
k1
x
k eq
F
k2
Figure 3-9
F
Parallel spring elements
F = k1 x + k2 x = ( k1 + k2 ) x = keq x
where
keq = k1 + k2
This formula can be extended to
n
n
keq = ∑ ki
i =1
( for parallel springs )
(3-9)
springs connected side-by-side as follows:
( for parallel springs )
(3-10)
Series Springs. For the springs in series, Figure 3-10, the force in
each spring is the same. Thus
y
k1
x
k2
k eq
F
F
Figure 3-10 Series spring elements
F = k1 y ,
F = k2 ( x − y )
Eliminating from these two equations yields
⎛
F⎞
F = k2 ⎜ x − ⎟
k1 ⎠
⎝
or
F = k2 x −
k2
F ⇒
k1
k2 x = F +
10/34
⎛k +k ⎞
k2
F = ⎜ 1 2 ⎟F
k1
⎝ k1 ⎠
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
or
⎛
⎞
⎜ 1 ⎟
⎛ k1 + k2 ⎞
⎛ k2 k1 ⎞
x=⎜
⎟F ⇔ F = ⎜
⎟x = ⎜ 1 1 ⎟x
⎜ + ⎟
⎝ k2 k1 ⎠
⎝ k1 + k2 ⎠
⎜k k ⎟
1
2 ⎠
⎝14
24
3
keq
where
1
1 1
= +
keq k1 k2
which can be extended to the case of
n
1
1
=∑
keq i =1 ki
( for series springs )
n
(3-11)
springs connected end-to-end as follows
( for series springs )
(3-12)
Free Vibration without damping.
Consider the mass spring system shown in Figure 3-11. The equation of motion can
be given by1
m &&
x+k x=0
or
&&
x+
k
x = 0 ⇒ &&
x + ωn2 x = 0
m
K
where
ωn =
k
m
is the natural frequency of the system and is expressed in
rad/s.
Taking LT of both sides of the above equation where
x ( 0 ) = xo
and
x& ( 0 ) = x&o
gives
s 2 X ( s ) − sx ( 0 ) − x& ( 0 ) + ωn2 X ( s ) = 0
1444
424444
3
M
x (t )
Figure 3-11 Mass
Spring System
L [ x&&]
rearrange to get
1
The weight
W = mg
of the mass
m
is equal to the static deflection of the spring. Therefore, they
will cancel each other, (See Appendix A).
11/34
ME 413 Systems Dynamics & Control
X (s) =
Chapter Three: Mechanical Systems
sxo + x&o
, ⇒ Remember poles are s = ± jωn
1
424
3
s 2 + ωn2
complex conjugates
X ( s) =
x (t )
and the response
ωn
s
+ xo 2
2
ωn s + ωn
s + ωn2
x&o
2
is given by
x (t ) =
It is clear that the response
x&o
ωn
sin (ωnt ) + xo cos (ωnt )
x (t )
consists of a sine and cosine terms and depends
on the values of the initial conditions
xo
and
x&o . Periodic motion such that described
by the above equation is called simple harmonic motion.
x (t )
slope = x&o
Im
s − plane
ωn
xo
Re
t
−ωn
Period = T =
2π
ωn
Figure 3-12 Free response of a simple harmonic motion and pole location on the s-plane
if
x& ( 0 ) = x&o = 0,
x ( t ) = xo cos (ωnt )
The period T is the time required for a periodic motion to repeat itself. In the
present case,
Period T =
The frequency
f
2π
ωn
seconds
of a periodic motion is the number of cycles per second (cps), and
the standard unit of frequency is the Hertz (Hz); that is 1 Hz is 1 cps. In the present
case,
12/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Frequency f =
The undamped natural frequency
1 ω
=
Hz
T 2π
ωn
is the frequency in the free vibration of a
system having no damping. If the natural frequency is measured in Hz or in cps, it is
denoted by
fn .
If it is measured in rad/sec, it is denoted by
ωn .
In the present
system,
ωn = 2π f n =
Rotational System.
k
rad/sec
m
Rotor mounted in bearings is shown in figure 3-
13 below. The moment of inertia of the rotor about the axis of rotation is
J . Friction
in the bearings is viscous friction and that no external torque is applied to the rotor.
ω
b
J
J
ω
bω
1442443
T (t )
Figure 3-13 Rotor mounted in bearings and its FBD.
Apply Newton’s second law for a system in rotation
∑ M = Jθ&& = J ω&
J ω& + bω = 0 ⇒ ω& + ( b / J ) ω = 0
or
ω& +
Define the time constant
1
ω =0
( J / b)
τ = ( J / b ) , the previous equation can be written in the
form
1
ω& + ω = 0, ω ( 0 ) = ωo
τ
which represents the equation of motion as well as the mathematical model of the
system shown. It represents a first order system. To find the response
LT of both sides of the previous equation.
13/34
ω ( t ) , take
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
⎡
⎤
⎡
⎤
⎢ sΩ ( s ) − ω ( 0 ) ⎥ + 1 ⎢ Ω ( s ) ⎥ = 0
4244
3 ⎥ τ ⎢ {⎥
⎢ 14
L[ω& ]
⎣ L[ω ] ⎦
⎣⎢
⎦⎥
where
1⎞
⎛
⎜ s + ⎟ Ω ( s ) = ωo
⎝ τ⎠
the denominator s + (1 τ )
equation
s + (1 τ ) = 0
Ω(s) =
⇒
ωo
s + (1 τ )
is known as the characteristic polynomial and the
is called the characteristic equation. Taking inverse LT of the
above equation will give the expression of
ω (t )
ω ( t ) = ωo e −(b / J ) t = ωo e −(1/ τ )t = ωo e −α t
It is clear that the angular velocity decreases exponentially as shown in the figure
below. Since
lim e
t →∞
−( t / τ )
= 0;
then for such decaying system, it is convenient to
depict the response in terms of a time constant.
Free response of a rotor bearing system
1.5
α=0
ω
o
α=0.2
ω (t)
α=0.5
α=0.7
α=1
0.5
α=2
α=5
α =10
0
0
5
10
time (t)
Figure 3-14 Graph of
ωo e −α t
14/34
15
for ranges of
α.
20
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
A time constant is that value of time that makes the exponent equal to -1. For this
system, time constant τ = J / b . When t = τ , the exponent factor is
e
−( t / τ )
=e
−(τ / τ )
= e −1 = 0.368 = 36.8 %
This means that when time
constant = τ ,
the
time
response
is
reduced
to
36.8 %
of its final value.
We also have
τ = J / b = time constant
ω (τ ) = 0.37 ωo
ω ( 4τ ) = 0.02 ωo
Figure 3-15 Curve of angular velocity
versus time
ω
t for the rotor shown in Figure 3-13.
Spring-Mass-Damper System.
Consider the simple mechanical system
shown involving viscous damping. Obtain the mathematical model of the system
shown.
Fb = b x&
k
b
m
Fk = k x
m
+x
x (t )
14444244443
Free Body Diagram (FBD)
Figure 3-16 Mass -Spring –Damper System and the FBD.
i)
ii)
The FBD is shown in the figure 3-16.
Apply Newton’s second law of motion to a system in translation:
∑F
= m x&&
⇒
Rearranging
15/34
− bx& − kx = mx&&
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
m x&& + bx& + k x = 0
The above equation represents the mathematical model as well as the free vibration
for a second order model. If m = 0.1 kg, b = 0.4 N/m-s, and k = 4 N/m , the
above differential equation becomes
0.1 &&
x + 0.4 x& + 4 x = 0 ⇒
To obtain the free response x
&&
x + 4 x& + 40 x = 0
( t ) , assume x ( 0 ) = xo
x& ( 0 ) = 0.
and
Take Laplace
transform of both sides of the given equation
⎡ s 2 X ( s ) − s x ( 0 ) − x& ( 0 ) ⎦⎤ + 4 ⎡⎣ sX ( s ) − x ( 0 ) ⎤⎦ + 40 ⎡⎣ X ( s ) ⎤⎦ = 0
⎣14444
1442443
1
424
3
244443
L ⎣⎡ x& ( t ) ⎦⎤
L ⎡⎣ &&
x( t ) ⎤⎦
Substitute in the transformed equation
obtain
or solving for
L ⎣⎡ x( t ) ⎦⎤
x ( 0 ) = xo
and
x& ( 0 ) = 0,
and rearrange, we
⎡⎣ s 2 + 4 s + 40 ⎤⎦ X ( s ) = [ sxo + 4 xo ]
X (s)
yields
X (s) =
( sxo + 4 xo )
s + 4 s + 40
2
=
( s + 4)
s + 4 s + 40
14243
2
xo
Characteristic polynomial
which can be written as
G (s) =
X (s)
( s + 4)
= 2
xo
s + 4 s + 40
14243
Characteristic polynomial
where
G (s)
is referred to as the transfer function that gives the relationship
between the input
xo
xo
and the output
X (s) . G (s)
can be shown graphically as:
(s + 4 )
s14
+44244
s+3
40
2
X(s)
Characteristic polynomial
144424443
Transfer function
Figure 3-17 Transfer function between input and output.
iii)
It is clear that the characteristic equation of the system is
has complex conjugates roots.
16/34
s 2 + 4 s + 40 = 0
and
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
2
s 2 + 4s + 40 = s1
+24
4 s +34 + 36 = ( s + 2 ) + 62 = 0
4
2
( s + 2 )2
The roots of the above equation are therefore complex conjugate poles given by
s1 = −2 + j 6 and s2 = −2 − j 6
iv)
The expression of
X (s) =
=
v)
( s + 4)
s + 4 s + 40
2
xo =
can be written now as:
2
( s + 2 + 2) x = ( s + 2) x +
x
o
o
2
2
2
2
2
2 o
+
+
+
+
+
+
s
2
6
s
2
6
s
2
6
(
)
(
)
(
)
( s + 2) x + 1
6
xo
2
2 o
3 ( s + 2 )2 + 62
( s + 2) + 6
Solving for
Or
X (s)
x ( t ) = L−1 ⎡⎣ X ( s ) ⎤⎦
yields
2
x (t ) =
1
⎛
⎞
x ( t ) = xo ⎜ e −2t cos 6t + e −2t sin 6t ⎟
3
⎝
⎠
10 −2t
xoe ( sin 6t + 71.56o )
3
x ( t)
e −2t
s1 = −2 + j 6
1
x (t ) = xo ⎜⎛e−2t cos 6t + e−2t sin 6t ⎞⎟
3
⎝
⎠
−2
2π
ωd
s − plane
j6
t
Td =
Im
Re
− j6
s2 = −2 − j 6
Figure 3-18 Free Vibration of the mass-spring-damper system described by
&&
x + 4 x& + 40 x = 0 with initial conditions x ( 0 ) = xo
2
(See Appendix B).
17/34
and
x& ( 0 ) = 0, .
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Pole-Zero Map
10
Imaginary Axis
5
0
-5
-10
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
Real Axis
Free vibration of mass-spring-damper system
1.5
x(t)
xo
0.5
0
-0.5
0
0.5
1
1.5
2
2.5
t (sec)
3
3.5
4
4.5
5
Figure 3-18 Free Vibration of the mass-spring-damper system described by
&&
x + 4 x& + 40 x = 0 with initial conditions x ( 0 ) = xo
and
x& ( 0 ) = 0, .
3.4 WORK ENERGY, AND POWER
Work.
The work done in a mathematical system is the product of a
force and a distance (or a torque and the angular displacement) through which the
force is exerted with both force and distance measured in the same direction.
d
d
F
θ
F
W = F d cos θ
W =F d
Figure 3-19 Work done by a force
The units of work in SI units are :
[ work ] = [ force × distance ] = [ N-m ] = [ Joule ] = [ J ]
The work done by a spring is given by:
18/34
.
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
x
1
W = ∫ k x dx = k x 2
{
2
0 F
k
F
F
l
l+x
Figure 3-19 Work done by a spring.
Energy.
Energy can be defined as ability to do work. Energy can be
found in many different forms and can be converted from one form to another. For
instance, an electric motor converts electrical energy into mechanical energy, a
battery converts chemical energy into electrical energy, and so forth.
According to the law of conservation of energy, energy can be neither created
nor destroyed. This means that the increase in the total energy within a system is
equal to the net energy input to the system. So if there is no energy input, there is
no change in the total energy of the system.
Potential Energy.
The Energy that a body possesses because of its
position is called potential energy.
• In mechanical systems, only mass and spring can store potential
energy.
• The change in the potential energy stored in a system equals the work
required to change the system’s configuration.
• Potential energy is always measured with reference to some chosen
level and is relative to that level.
m
h
x
mg
F
Figure 3-20 Potential energy
Refer to Figure 3-20, the potential energy,
x
U of a mass m
U = ∫ mg dx = mgh
0
19/34
is given by:
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
For a translational spring, the potential energy U (sometimes called strain energy
which is potential energy that is due to elastic deformations) is:
x
x
0
0
U = ∫ F dx = ∫ k x dx =
If the initial and final values of
Change in potential energy
x
are
1 2
kx
2
x1 and x2 , respectively, then
x2
x2
x1
x1
ΔU = ∫ F dx = ∫ k x dx =
1 2 1 2
k x2 − k x1
2
2
Similarly, for a torsional spring
Change in potential energy ΔU
θ2
θ2
θ1
θ1
= ∫ T dθ = ∫ kT θ dx =
1
1
kT θ 22 − kT θ12
2
2
Only inertia elements can store kinetic energy in
Kinetic Energy.
mechanical systems.
⎧1
2
mv
⎪⎪
T = Kinetic energy= ⎨ 2
⎪ 1 Jθ& 2
⎪⎩ 2
(Translation)
(Rotation)
The change in kinetic energy of the mass is equal to the work done on it by
an applied force as the mass accelerates or decelerates. Thus, the change in kinetic
energy
T
of a mass
m
moving in a straight line is
Change in kinetic energy
x2
t2
x1
t1
dx
dt
dt
ΔT = ΔW = ∫ F dx = ∫ F
t2
t2
v2
t1
t1
v1
= ∫ F v dt = ∫ mv& v dt = ∫ m v dv
1
1
= mv22 − mv12
2
2
The change in kinetic energy of a moment of inertia in pure rotation at
angular velocity
θ&
is
Change in kinetic energy
20/34
ΔT =
1 &2 1 &2
Jθ 2 − Jθ1
2
2
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Dissipated Energy.
Consider the damper shown in Figure 3-21 in
x1
which one end is fixed and the other end is moved from
energy
ΔW
to
x2 . The dissipated
in the damper is equal to the net work done on it:
x2
x2
t2
t
2
dx
ΔW = ∫ F dx = ∫ b x& dx = b ∫ x&
dt = b ∫ x& 2 dt
{
dt
x1
x1 F
t1
t1
x2
x1
x
b
Figure 3-20 Damper.
Power.
Power is the time rate of doing work. That is,
Power = P =
dW
dt
where dW denotes work done during time interval dt .
In SI units, the work done is measured in Newton-meters and the time in seconds.
The unit of power is :
N-m ⎤ ⎡ Joule ⎤
=
= [ Watt ] = W .
⎣ s ⎥⎦ ⎢⎣ s ⎥⎦
[ Power ] = ⎡⎢
Passsive Elements. Non-energy producing element. They can only
store energy, not generate it such as springs and masses.
Active Elements.
Energy producing elements such as external
forces and torques.
Energy Method for Deriving Equations of Motion. Equations
of motion are derive from the fact that the total energy of a system remains the
same if no energy enters or leaves the system.
Conservative Systems.
Systems that do not involve friction
(damping) are called conservative systems.
21/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Δ (T + U )
1424
3
=
Δ
W
{
Net work done on the
system by external forces
Change in the total energy
If no external energy enters the system ( ΔW
forces) then
= 0 , no work done by external
Δ (T + U ) = 0
or
(T + U ) = constant
Conservation of energy only
for conservative systems
(No friction or damping)
An Energy Method for Determining Natural Frequencies.
The natural frequency of a conservative system can be obtained from a
consideration of the kinetic energy and the potential energy of the system. Let us
assume that we choose the datum line so that the potential energy at the equilibrium
state is zero. Then in such a conservative system, the maximum kinetic energy
equals the maximum potential energy , or
Tmax = U max
Solved Problems.
Example 3-5 Page 80 (Textbook)
Consider the system shown in the Figure shown. The displacement
measured from the equilibrium position.
The Kinetic energy is:
The potential energy is:
x
is
k
1
T = m x& 2
2
1
U = k x2
2
The total energy of the system is
m
1
1
T + U = m x& 2 + k x 2
2
2
The change in the total energy is
d
d 1
1
(T + U ) = ⎛⎜ m x& 2 + k x 2 ⎞⎟ = 0
dt
dt ⎝ 2
2
⎠
1
1
&&& + × 2 × k xx& = 0
= × 2 × m xx
2
2
= x& ( m x&& + k x ) = 0
Since
x& is not zero then we should have
m x&& + k x = 0
22/34
x
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
or
&&
x+
k
x = 0 ⇒ &&
x + ωn2 x = 0
m
where
ωn =
k
m
is the natural frequency of the system and is expressed in rad/s. Another way of finding the
natural frequency of the system is to assume a displacement of the form
x = A sin ωnt
Where
A is the amplitude of vibration. Consequently,
1
1
2
T = m x& 2 = m A2ω 2 ( cos ωn t )
2
2
1
1
2
U = k x 2 = k A2 ( sin ωn t )
2
2
Hence the maximum values of
T
and
U
are given by
1
Tmax = m A2ωn2 ,
2
Since
U max =
Tmax = U max , we have
From which
1
1
m A2ωn2 = k A2
2
2
ωn =
k
m
23/34
1
k A2
2
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Problem 24/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Problem 25/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
26/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
27/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
28/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
29/34
ME 413 Systems Dynamics & Control
TABLE 1.
Chapter Three: Mechanical Systems
Summary of elements involved in linear
mechanical systems
Rotation
Translation
Element
x
F4
Inertia
F2
F1
m
F3
T
∑F = m a
∑T = J α
x1
x2
F
F
k
θ1
F = k ( x1 − x2 ) = kx
F
b
F
b
T
T
θ&1
F = b( x&1 − x& 2 ) = bx&
θ2
T = k (θ1 − θ 2 ) = kθ
x& 2
x& 1
Damper
T
T
k
Spring
θ
J
θ&2
T = b(θ&1 − θ&2 ) = bθ&
PROCEDURE
The motion of mechanical elements can be described in various dimensions as
translational, rotational, or combination of both. The equations governing the motion
of mechanical systems are often formulated from Newton’s law of motion.
1. Construct a model for the system containing interconnecting elements.
2. Draw the free-body diagram.
3. Write equations of motion of all forces acting on the free body diagram. For
translational motion, the equation of motion is Equation (1), and for rotational
motion, Equation (2) is used.
30/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
APPENDIX A:
Static Equilibrium
k
Lo
k
k
δ st
m
m
x
kδ st
k( x +δst )
m
m
mg
mg
At static equilibrium, we have:
mg = K δ st
Let the mass be displaced a distance x downward from its equilibrium, the spring
force becomes
f = − K ( x + δ st ) . Apply Newton’s second law for the mass-spring
system, one can write:
∑ F = mx&&
or
− K ( x + δ st ) + mg = mx&&
or
− Kx − K δ st + mg = mx&&
14243
= 0 ( Static Equilibrium )
Therefore
mx&& + Kx = 0
31/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
The above equation represents the mathematical model for the mass-spring
system. It is a second order ordinary differential equation with constant
coefficients. It is clear that the weight mg cancels with the static deflection − K δ st of
the system. Therefore, it does not appear in the equation of motion.
32/34
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
APPENDIX B:
The expression of
sin (ωt ) , that is
a cos (ωt ) + b sin (ωt )
can be written in terms of
cos (ωt )
or
⎛
⎞
a
b
(
)
(
)
ω
ω
a cos ( ωt ) + b sin ( ωt ) = a 2 + b2 ⎜ 2
cos
t
sin
t
+
⎟
2
a 2 + b2
⎝ a +b
⎠
Define
ψ
such that
a
⎫
a + b ⎪⎪
⎬⇒
b
⎪
2
2
a + b ⎪⎭
cos ψ =
2
sin ψ =
2
b
ψ = tan −1 ⎜⎛ ⎟⎞
⎝a ⎠
Therefore
a 2 + b 2 (cos ψ cos ( ωt ) + sin ψ sin ( ωt ) )
a cos ( ωt ) + b sin ( ωt ) =
Using the identity
cos ( ωt − ψ ) = cos ( ωt ) cos ψ + sin ( ωt ) sin ψ
Therfore,
a cos ( ωt ) + b sin ( ωt ) =
a 2 + b 2 (cos ωt − ψ )
a cos ( ωt ) + b sin ( ωt ) =
a 2 + b 2 (sin ωt + ϕ )
or
Where
sin ϕ =
cos ϕ =
a
⎫
a + b ⎪⎪
⎬
b
⎪
a 2 + b 2 ⎭⎪
2
2
⇒
33/34
a
ϕ = tan −1 ⎛⎜ ⎞⎟
⎝b ⎠
ME 413 Systems Dynamics & Control
Chapter Three: Mechanical Systems
Useful Sites Torsion
http://www.esm.psu.edu/courses/emch13d/design/animation/animation.htm
Mass Spring System
http://www.colorado.edu/physics/phet/simulations/massspringlab/MassSpringLab2.swf
http://physics.bu.edu/~duffy/java/Spring2.html
http://www.ngsir.netfirms.com/englishhtm/SpringSHM.htm
http://www.myphysicslab.com/spring1.html
http://www.walter-fendt.de/ph11e/springpendulum.htm
http://webphysics.davidson.edu/physlet_resources/gustavus_physlets/VerticalSpring.html
http://www.sciences.univ-nantes.fr/physique/perso/gtulloue/equadiff/equadiff.html
Response of First and second Order Systems
http://www.sciences.univ-nantes.fr/physique/perso/gtulloue/equadiff/equadiff.html
34/34