Design Team 13 - Mechanical Engineering Department
advertisement

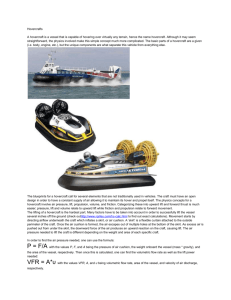
Design Team 13 Twin-Engine Remote Hovercraft April Project Report Raymond Fitzpatrick B00322395 Martin Mitchell B00433676 Jake Martell B00431852 Travis Lunn B00448582 Jeremy Keans B00450500 Dr. J.M. Chuang Submission Date: Submitted to: April 9th 2010 Dr. J. Militzer Abstract Hovercrafts are multi-purpose vehicles which can travel across various types of terrain with no alteration. The overall purpose for this design project is to build a hovercraft which can carry various payloads, up to 100 lbs, across land and water. This air cushioned vehicle (ACV) can be used for numerous different applications including military, aid, transportation of building supplies, etc. This report will outline the design process as well as the final selected design. It also includes sections on fabrication and testing of the hovercraft and all its components. Also included in this report are detailed design drawings, detailed budget, a list of calculations done for the project. i Acknowledgements Design Team 13 would like to extend our special thanks to our supervisor Dr. Chuang for his help throughout this project as well as his patience in working with us throughout both terms for the duration of this project. We would like to thank Dr. Militzer for his overseeing of the design project course. We would like to thank the department staff who assisted us, especially our assigned technician Mr. Albert Murphy for his help in welding, fabrication and testing. As well as thanking Mr. Mark MacDonald and Mr. Angus MacPherson for their help throughout the term. Finally we would like to thank Mr. Leo Cruickshank, a local hovercraft expert who provided advice coming from his hovercraft building experiences. Slipstream hovercraft who gave us a discount on parts we had ordered from them, Shell Canada for their funding donations, and Dalhousie University. ii Table of Contents Abstract ................................................................................................................................ i Acknowledgements ............................................................................................................. ii List of Tables ..................................................................................................................... iv List of Figures .................................................................................................................... iv 1. Introduction ................................................................................................................. 1 2. Design Requirements ................................................................................................... 3 3. Design Selection .......................................................................................................... 5 3.1. Engine Selection ................................................................................................... 5 3.2. Thrust Powertrain ................................................................................................. 6 3.3. Lift Powertrain ..................................................................................................... 7 3.4. Platform & Skirt ................................................................................................... 9 3.5. RC Control / Steering ......................................................................................... 10 3.6. Buoyancy Compensation.................................................................................... 10 4. Final Design ............................................................................................................... 11 4.1. Thrust Powertrain ............................................................................................... 12 4.2. Lift Powertrain ................................................................................................... 13 4.3. Platform & Skirt ................................................................................................. 14 4.3.1. Platform .......................................................................................................... 15 4.3.2. Skirt ................................................................................................................ 15 4.4. RC Control & Steering ....................................................................................... 17 5. Build and Construction .............................................................................................. 19 5.1. Thrust Powertrain ............................................................................................... 19 5.2. Lift Powertrain ................................................................................................... 20 5.3. Platform and Skirt .............................................................................................. 22 5.4. RC Controls ........................................................................................................ 24 6. Testing ....................................................................................................................... 25 6.1. Size and Weight ................................................................................................. 25 6.1.1. Size ................................................................................................................. 25 6.1.2. Weight ............................................................................................................ 26 6.2. Safety.................................................................................................................. 27 6.2.1. Shrouds ........................................................................................................... 28 6.2.2. Kill Switch ...................................................................................................... 29 6.3. Twin Engine ....................................................................................................... 29 6.4. Terrain ................................................................................................................ 29 6.5. RC Controls ........................................................................................................ 30 6.6. Payload ............................................................................................................... 32 6.7. Steering with Rotating Thrust Fan ..................................................................... 33 6.8. Buoyancy............................................................................................................ 35 6.9. Miscellaneous Criterion ..................................................................................... 36 6.9.1. Maximum speed (5 m/s or 18 km/h). ............................................................. 36 6.9.2. Minimum hover height of 3” .......................................................................... 38 6.9.3. Aesthetics Testing........................................................................................... 40 7. Budget ........................................................................................................................ 42 8. Conclusions ............................................................................................................... 44 References ......................................................................................................................... 45 iii Appendix A: Calculations ................................................................................................. 46 Appendix B: Drawings ..................................................................................................... 48 List of Tables Table 1: Engine Design Selection Matrix ........................................................................... 5 Table 2: Thrust Powertrain Design Selection Matrix ......................................................... 7 Table 3: Lift Powertrain Design Selection Matrix .............................................................. 8 Table 4: Platform & Skirt Design Selection Matrix ......................................................... 10 Table 5: Main Parts List for Thrust Assembly.................................................................. 13 Table 6: Main Parts List for Lift Assembly ...................................................................... 14 Table 7: Main Parts List for Platform and Skirt ............................................................... 14 Table 8: Main Parts List for Steering / RC Control Assembly ......................................... 18 Table 9: Weight Testing Results ....................................................................................... 27 Table 10: Terrain Testing Results ..................................................................................... 30 Table 11: Speed Test Results ............................................................................................ 38 Table 12: Hover Height Test Results ................................................................................ 40 Table 13: Final Budget...................................................................................................... 43 List of Figures Figure 1: Direct Drive Thrust Fan ...................................................................................... 6 Figure 2: Chain Driven Thrust Fan ..................................................................................... 6 Figure 3: Centrifugal Fan .................................................................................................... 7 Figure 4: Horizontal Fan ..................................................................................................... 7 Figure 5: Tilted Lift Fan Assembly .................................................................................... 8 Figure 6: Raised Horizontal Fan ......................................................................................... 8 Figure 7: Diffuser Plate Design .......................................................................................... 9 Figure 8: Bag Skirt Design ................................................................................................. 9 Figure 9: Final Design ...................................................................................................... 11 Figure 10: Thrust Powertrain Assembly ........................................................................... 12 Figure 11: Lift Powertrain Assembly ............................................................................... 14 Figure 12: Platform ........................................................................................................... 15 Figure 13: Airflow Analysis of Bag Skirt (Red=High Velocity, Blue=Low Velocity) .... 17 Figure 14: Steering Control Assembly ............................................................................. 18 Figure 15: Chain Driven Thrust Assembly Construction ................................................. 19 Figure 16: Final Thrust Assembly .................................................................................... 20 Figure 17: Lift Assembly Construction ............................................................................ 21 Figure 18: Top Plate & Skirt Construction Top................................................................ 23 Figure 19: Top Plate & Skirt Construction Bottom .......................................................... 23 Figure 20: Steering Mechanism ........................................................................................ 24 Figure 21: Length Measurement ....................................................................................... 25 Figure 22: Width Measurement ........................................................................................ 26 Figure 23: Weighing of Thrust Assembly ........................................................................ 27 Figure 24: Shrouded Thrust Fan ....................................................................................... 28 iv Figure 25: Shrouded Lift Fan ............................................................................................ 29 Figure 26: Lift Kill Switch Testing ................................................................................... 32 Figure 27: Thrust Kill Switch Testing .............................................................................. 32 Figure 28: Basic Steering Test Results (Top to bottom: turning left, center, right) ......... 35 Figure 29: Garmin GPS Speed Readout ........................................................................... 37 Figure 30: Hover Height Measurement (front) ................................................................. 39 Figure 31: Hover Height Measurement (back) ................................................................. 39 Figure 32: Aesthetic Poll Results ...................................................................................... 41 Figure 33: Cross Sectional View of Skirt (Jackson, 2004, p. 68) ..................................... 46 v 1. Introduction Air Cushioned Vehicles, also known as ACVs, are an ideal type of payload carrying medium as it is amphibious. This allows the hovercraft to carry various payloads across various types of terrain in a single journey whereas multiples vehicles would be needed to complete this same journey. Team 13 is undertaking the design and construction of a twin-engine remote controlled hovercraft also known as an Air Cushioned Vehicle (ACV) which will be capable of carrying a 100 lb payload across various terrains. This payload was picked because it, when combined with the total weight, was at the upper range of the hovercraft guidelines for pressure of 15 lb/ft2 to maintain operation. The design was selected via an iterative design methodology in which many different designs for the four separate sections; namely, thrust powertrain, lift powertrain, platform & skirt, and RC control/steering, were considered. The main focus was to find the best balance between performance, budget, and construction feasibility. The selected design consists of two engines (one lift & one thrust), a bag skirt design without holes, single plate platform, and rotating thrust fan for steering. This prototype hovercraft design will utilize all of the thrust power from the fan by rotating the fan versus using the conventional flaps which reduce air flow. The hovercraft will be controlled using a 6-Channel remote and receiver which will control both engine throttles as well as steering of the craft. In order for safety the craft will be equipped with one kill switch, for both engines. This report will outline the design requirements set out in September, the final budget, a list of testing results, as well as recommendations for future work and improvements on the current design. It will then detail the fabrication and construction undertaken during the winter term and discuss the modifications needed to the original design needed in order to meet the design requirements during the testing phase. It will then discuss the testing process as well as the results obtained from them. Work during the winter term commenced upon the team's return to Halifax in January began with the construction of the design from the fall term. As parts and stock arrived the fabrication was the first step in the building process. The raw aluminum 1 material was fabricated into the thrust assembly, lift assembly, and main plate, and upon completion of this the task was undertaken to construct the skirt of the durable nylon skirt material. After construction of the skirt was complete testing started with the lift assembly and was immediately deemed successful as the craft hovered effortlessly. Then after finalizing the chain-driven thrust assembly and testing it with negative results due to excessive vibrations modifications were attempted including chain tensioners and idler sprockets. Neither method worked so a redesign which included direct driving the thrust fan by raising the engine and lowering the fan to meet each other. This new design proved extremely successful with smooth operation and allowed the testing process to begin. During the testing of all the criteria put forward, the project was deemed a success as it met virtually all of the listed criteria. It lifted payload, steered, and traversed as desired on all surfaces (asphalt, gravel, sand, water) with the exception of grass. Research shows that grass is one of the most difficult surfaces for a hovercraft to traverse because it is often not smooth, and creates very high friction with the craft relative to other surfaces. 2 2. Design Requirements The primary objective of the project is to be able to carry a payload of 100 lbs across various types of terrain while demonstrating the advantages of a hovercraft over that of either a typical land or water vehicle. There are many secondary design requirements which are also proposed as follows: Powered by twin engines and twin fans (lift and thrust) to achieve maximum possible performance Maximum Size 6' x 4' so that transportation can be obtained in any ordinary quarter ton pickup trick. Maximum weight of 250 lbs was selected as a reasonable number when considering the weight of 1/4" aluminum used for the design. Must move a payload of a minimum 100 lbs. This weight is selected because 15 lb/ft2 is the upper range of operation pressure for hovercrafts. The 100 lbs payloadbrings our hovercraft weight to approximately this value as well as is heavy enough to carry many standard items or tools to assist in use. Fans must be covered and shrouded for safety. Controlled by remote control, two thrust controls, and steering. Must include one kill switch for safety shut off of both engines. Maximum speed of at least 5 m/s. This speed was selected as it provides an effective speed as well as being much faster than last year's 1.3m/s craft. Steering controlled by rotating the thrust fan. Craft must be buoyant in case of emergency engine shut down. Minimum hover height of 3”. This value was selected as it will allow the craft to traverse most small obstacles in its way and discrepancy in terrain. Capable of operation on various terrain including: o Asphalt, o Grass, o Sand, o Snow, 3 o Water, and o Rough land – gravel. Aesthetically pleasing. 4 3. Design Selection 3.1. Engine Selection In order to provide the proper amount of thrust and lift the selection of number of gas engines as well as required horsepower had to be selected. The options which were weighed were a single 6.5 hp horizontal shaft engine, two 6.5 hp horizontal shaft engines (one thrust and one lift), and one 5 hp vertical shaft (lift) and one 6.5 hp horizontal shaft (thrust) engine. Due to the carrying capacity of the hovercraft the first option of a single 6.5 hp engine was not selected. Although this would be the most inexpensive option it is not viable due to the lift requirements of the hovercraft. The second alternative of two 6.5 hp horizontal shaft engines provided the necessary amount of horsepower for both thrust and lift but due to the construction difficulties it was not selected. Ducting the air from a horizontal fan for lift posed additional flow consideration problems as well as an increase in cost. The horizontal engines also weigh more than a vertical engine. The third option was the use of one 5 hp vertical shaft engine for lift and a 6.5 hp horizontal shaft engine for thrust. This option poses the best power to weight as well as simplifying the construction of the hovercraft. Although the vertical engine is more expensive than that of the horizontal, the decrease in construction costs by using it will lower the overall cost of the hovercraft. Table 1 shows the design selection matrix for the selection of the engines. Due to the weight reductions and construction cost reductions Option #3 consisting of one 5 HP vertical shaft and one 6.5 HP horizontal shaft engine were selected. Table 1: Engine Design Selection Matrix Design Weight Power Construction Control #1 Single Engine 10 (~30 lbs) 2 (6.5hp) 4 4 #2 Two Horizontal Shafts (2 x 6.5hp) 3 (~70 lbs) 10 (13hp) 4 7 #3 One Vertical (5hp) & 1 Horizontal (6.5 hp) 6 (~60 lbs.) 8 (11.5hp) 8 10 Cost 9 (~$200) 6 (~$400) 4 (~$500) Total 29 30 34 5 3.2. Thrust Powertrain In order for the hovercraft to make turns, it was determined that the thrust fan, which is located at the back of hovercraft, would have to rotate. With a rotating thrust fan, the thrust force could be applied at different angles on the back of the hovercraft in order to rotate the hovercraft and make turns. The thrust fan and motor will be placed on a rotating platform. In order to rotate the platform, three separate designs were examined in terms of performance, vibration resistance, center of gravity, construction and cost. The results of these ratings can be found in Table 2. All three designs require the use of a remotely controlled electric motor. Design #1 involves attaching the motor directly to the thrust fan as shown in Figure 1. This design is simple but has a few significant flaws. First, the platform would be difficult to control as the rotating shaft from the electric motor would rotate very fast. Secondly, this design would require placing the electric motor directly beneath the platform which would Figure 1: Direct Drive Thrust Fan elevate the thrust fan and create a higher center of gravity for the hovercraft. Design #2 involves the use of a belt drive to translate rotational power from the motor to the platform. This design gives better control and performance over Design #1 as the rotational speed can be reduced through the use of different sheave sizes. A disadvantage of this design would be that it would require a significant amount of tension in the belts which would create a bending moment on the motor shaft and platform shaft. Design #3 is similar to Design #2 but uses a chain drive to translate the power rather than a belt, see Figure 2. This design would eliminate the problem of the bending moment in the shafts because the chain does not need to be in a great deal of tension. From the results in Table 2, Design #3, Figure 2: Chain Driven Thrust Fan chain driven design, was selected. Design #1 was rated significantly lower. Design #3 6 was selected in order to simplify construction as well as reduce bearing forces as discussed above. Table 2: Thrust Powertrain Design Selection Matrix Design #1 Direct Drive #2 Belt Drive #3 Chain Drive 3.3. Performance Vibration Center of Gravity Construction Cost Total 4 8 8 4 4 6 4 8 8 10 3 8 8 (~$50) 6 (~$50) 4 (~$60) 22 29 34 Lift Powertrain Lift Powertrain is a very important aspect of the hovercraft since it creates the air pressure beneath the hovercraft that lifts it off the ground. This (combined with skirt design) will give the hovercraft its ability to float and traverse the various specified terrain. A front mounted engine for lift has been chosen to balance the rear thrust engine so longitudinal center of gravity remains even without payload. The results of the design selection matrix can be seen in Table 3. Design #1: Horizontal shaft engine and a centrifugal fan directing air downwards, see Figure 3. This design involves an expensive centrifugal fan because the fan intakes and outputs air through different directions. This fan works similar to a pump and is less efficient than a standard fan flowing air straight through. Figure 3: Centrifugal Fan Design #2: A vertical shaft engine with a corresponding fan blowing air directly straight downward, see Figure 4. This design is the easiest to construct as it requires only a platform to mount the engine giving space and air access to the fan mounted directly to the output shaft. This fan provides an efficient flow of air. The downfall Figure 4: Horizontal Fan of this design, which led to it not being selected, is that the close proximity of the fan blades to the skirt poses a risk of damaging the skirt during shutdown or deflation. 7 Design #3: An angled engine and fan blowing air towards the rear of the hovercraft, see Figure 5, which would give a better dispersion of air. The angled fan would provide better airflow to the rear of the craft which a straight vertical fan would not reach as easily, providing a better balance. However this Figure 5: Tilted Lift Fan Assembly design is complicated because the engine then must be mounted at an angle, which makes the mounting complicated. Furthermore, the engines are designed for fuel and oil flow to be operated with a level engine; it is questionable how the engine systems will react to an angled position. Design #4: as seen in Figure 6 is conceptually very similar to design #2. However by raising the engine vertically upwards a height of 13 inches gives this design two major advantages. First it removes the risk of the fan damaging the skirt during deflation, because the skirt cannot deflate in close proximity to the blades. The second major improvement is that it allows us to taper the duct from the blades to the skirt inlet effectively. Figure 6: Raised Horizontal Fan As can be seen in Table 3, Design #4 the raised vertical fan design has been selected. The main reason for this selection is the ability to funnel the air flow into a smaller cross section as well as keeping the skirt material out of the vicinity of the fan blades. Table 3: Lift Powertrain Design Selection Matrix Uniformity of Airflow Control Construction Weight Cost Total #1 Horizontal Engine with Centrifugal Fan 4 8 2 2 (~60lbs) 2 (~$350) 18 #2 Vertical Fan 8 5 (skirt interference) 9 8 (~45lbs) #3 Fan on angle 10 8 4 6 (~50lbs) #4 Raised Vertical Fan 10 10 (no interference) 8 7 (~50lbs) Design 9 (~$250) 4 (~$350) 39 32 9 (~$250) 44 8 3.4. Platform & Skirt One of the most vital parts of a hovercraft is the design of the platform and skirt. There are many ways in which a seal can be made with the ground and after reviewing multiple selections online three different designs were considered. Design #1 shown in Figure 7, uses a diffuser plate to diffuse the air and create pressure under the hovercraft, Design #2 is called a “bag skirt” and the air is directly flows into the skirt with holes in it, and Design #3, is a combination of a diffuser plate with a bag skirt. Design #1, shown in Figure 7, is one of the more expensive alternatives for the design. Due to having multiple plates the construction of this design is also more complex. The uniformity of the airflow through the plate is also a downfall of this design. Design #2, see Figure 8, is a simple Figure 7: Diffuser Plate Design alternative to the diffuser plate. In this design the air flows directly into the skirt inflating it and then the air is released under the hovercraft through designed holes in the skirt. This design is also the lightest, and simplest to construct. Figure 8: Bag Skirt Design Design #3, is a combination of Design‟s #1 and #2 using two plates and a bag skirt design. This design complicates the construction and also adds weight and cost. The airflow through this design is more uniform than that of Design #1. Table 4 shows the design selection matrix for the platform and skirt. The bag skirt design was selected for its overall ease of construction, uniformity of airflow as well as reduced cost and weight. 9 Table 4: Platform & Skirt Design Selection Matrix Uniformity of Airflow Control Construction Weight Cost Total #1 Diffuser Plate 6 8 6 8(~75lbs) 32 #2 Bag Skirt 10 8 10 10 (~50lbs) 4(~$250) 8 (~$200) #3 Bag Skirt w/ Diffuser Plate 8 8 8 6 (~75lbs) 4(~$250) 34 Design 3.5. 46 RC Control / Steering The selection of the radio control was limited to a single design. A controller with a minimum of 4 channels was selected as it is necessary to have a channel for each engine throttle, a channel for steering, as well as one channel for the kill switches. Four servo motor actuators will be used; two to control each individual throttle and two to actuate the kill switches on each engine. A high torque servo motor will be used and remote controlled to rotate the steering fan. 3.6. Buoyancy Compensation In case of emergency shutdown on water the craft must be buoyant so that it can float and be retrieved. Highly buoyant material such as solid foam will be added to the craft to gain buoyancy. Material positioning will be in a location that will not detract from craft aesthetics such as directly beneath the plate and inside the skirt itself. Inside the skirt will also be highly beneficial because it will reduce the water which could get in the skirt when shutdown occurs, and replace that volume with a buoyant volume. 10 4. Final Design The hovercraft design incorporates many challenges for Team 13 to overcome. These challenges presented themselves throughout the design and construction processes. The design minimizes the center of gravity of the overall craft in order to increase the stability of the overall ACV. The overall final design is one that uses tried and tested hovercraft design with a state of the art rotating thrust fan for steering, which can be seen in Figure 9. The final design accounts for many design alterations from that listed in the Section 3 Design Selection to account for construction and testing issues. All alterations are listed in each section under the proposed final design. This is done in order to demonstrate that the design process was done in such a manner that shows the engineering thought put into the overall design but also illustrates the problems which were encountered and how they were overcome. The hovercraft was designed by separating the craft into four separate sections: Thrust Powertrain, Lift Powertrain, Platform & Skirt, and the Remote Control, Steering, and Electronics. Figure 9: Final Design 11 4.1. Thrust Powertrain The thrust powertrain is the system responsible for lateral propulsion of the ACV. To keep the center of gravity as low as possible the engine will be mounted directly onto the rotating steering plate, see Section 4.4 for details on the steering. The center of gravity was largely taken into account in order to maximize the overall stability of the craft. In order to drive the fan, the drive shaft of the engine will have an attached gear sprocket which will be attached to the input shaft of the fan via chain. The 22” diameter thrust fan is attached directly to the input shaft using a key and bolt connection and produces 20.4 lbf which is calculated in Appendix A: Calculations. The final design selected for the thrust assembly can be seen in Figure 10 along with a list of parts as shown in Table 5. Figure 10: Thrust Powertrain Assembly 12 Table 5: Main Parts List for Thrust Assembly Item Engine Fan Dampers Fan Supports Sprocket Chain Fan Shaft Angular Bearing Bearing Block Pillow Block Mounting Plate 4.2. Description Qty 6.5 hp horizontal shaft engine, make Powerfist 22" diameter fiberglass fan Rubber dampers (from scrap) Custom manufactured aluminum fan support assemblies 10 tooth V-Series sprocket Length of chain 3/4" custom shaft 12" length 3/4” bearing for thrust and radial load Custom built block for angular bearing Radial bearing 24" OD aluminum mounting plate 1 1 N/A 2 2 1 1 1 1 1 1 Lift Powertrain The lift powertrain is in charge of providing the necessary pressure underneath the craft to lift the craft‟s weight off of the ground. This pressure is created using a vertical shaft engine attached directly to the lift fan. This fan forces air directly into the bag skirt, see Section 4.3.2 for bag skirt details, which then inflates the skirt and creates the pressure under the craft. The lift engine is mounted on a custom made aluminum plate, which has sections removed in order to allow air flow, and the plate is supported with 6 pillars to hold the engine and fan in place. Vibration is minimized through the effective use of rubber pads under the mounts. The overall final design of the lift powertrain is shown in Figure 13 and a list of the main parts can be found in Table 6. 13 Figure 11: Lift Powertrain Assembly Table 6: Main Parts List for Lift Assembly Item Engine Fan Key Dampers Engine Mounts Mounting Plate 4.3. Description 5 hp vertical shaft engine, make Powerfist 22" diameter fiberglass fan, 5 vane Standard square key way for 7/8” shaft Rubber dampers (from scrap) Custom manufactured aluminum fan supports Custom manufactured aluminum engine mount plate Qty 1 1 1 N/A 6 1 Platform & Skirt The most important aspect of design of a hovercraft is the platform and skirt design. This design is essential as it separates the lift air flow and creates the high pressured area beneath the craft which lifts the vehicle. The platform is also the housing for all the mounting of equipment such as engines, electronics, and fans. A complete listing of parts can be found in Table 7. Table 7: Main Parts List for Platform and Skirt Item Aluminum Plate Skirt Material Flotation Strengthening Ribs Skirt Bolt Strips Description 6’ x 4’ with 24” radius and 19” dia. hole Black-8 linear yards Added buoyancy Aluminum rods for added strength Aluminum strips to pinch skirt to platform Qty 1 N/A N/A N/A N/A 14 4.3.1. Platform The platform of the hovercraft is important as it will house all of the components and must take all of the respective loads. A ¼” Aluminum plate (5052-H32) was selected due to its lightweight and strength properties. The overall size of the hovercraft has been selected as 6 ft in length by 4 ft in width. This was chosen in order to minimize the cushion pressure under the hovercraft. When the preliminary size was selected of 5.5 ft by 3 ft a cushion pressure was calculated to be 21.21 lb/ft2 which is much higher than the average hovercraft cushion pressure of 10-15 lb/ft2. Once the new designed size was selected an acceptable cushion pressure of 14.58 lb/ft2 was calculated, which is still relatively high but carries a safety factor associated with it, for detailed calculation see Appendix A: Calculations. The final design of the platform can be seen in Figure 12. 4 ft 6 ft Figure 12: Platform 4.3.2. Skirt The skirt design will be a „Bag‟ skirt. This design is readily used in industry as one of the more reliable constructions. In this design the lift air is ducted directly into the skirt which then inflates. The skirt allows the air to exit under the craft using specified holes in the skirt. This air flow under the craft creates the high pressure which lifts the 15 ACV. The skirt is constructed using a Polyurethane-Coated Nylon Fabric which is attached directly to the platform at two separate locations sealed off air tight. In order to select the appropriate size of skirt, Team 13 followed standard practice for bag skirt design as outlined in Introduction to Radio Control Hovercraft (Jackson, 2004). Following common practices shown in this book the two different radiuses of the skirt were selected to be R1=3” and R2=6”, which exceed the design criteria of hover height of 3 inches. With these values the skirt cross sectional area and volume were calculated to be 0.49 ft2 and 8.97 ft3, see Appendix A: Calculations for detailed calculations. The skirt has dual purpose of both sealing off the high pressure area under the craft as well as providing emergency buoyancy in case of a shut down over water. In order to compare the amount of volume required to have the craft float in water the overall weight of the craft is divided by the density of water which is then compared with the volume of air in the skirt. With our current design there is 59% excess volume of air in the hovercraft skirt in order to keep the craft afloat. For detailed calculations see Appendix A: Calculations. An airflow analysis has been conducted on the bag skirt to ensure that the designed airflow will exit the craft evenly. This airflow analysis can be seen in Figure 13. 16 Figure 13: Airflow Analysis of Bag Skirt (Red=High Velocity, Blue=Low Velocity) Although at first glance this airflow seems to be uneven, this is only due to the limitations of the airflow software. This case as shown in Figure 13 shows the hovercraft at start up, with 5220 cubic feet per minute (cfm) of flow. Initially the pressure under the craft will be the same as atmospheric but as the pressure underneath increases the flow out of the skirt will become more stable and even. 4.4. RC Control & Steering A majority of RC control components have already been obtained free of charge, such as a 6 channel controller and receiver along with 5 servomotors. These have all been salvaged from previous design projects and will work perfectly for our requirements. It was decided that minor modification of the engines such as removing throttle leavers and connecting directly to the throttle would be the most cost and time effective way of utilizing RC controls. Through minor modifications of the stock engine setups (adjustment and replacement of levers and springs), the servomotors on hand will accomplish the tasks of engine throttles as well as kill switches. For simplicity of design and construction, and because the controller and receiver have additional channels than we initially desired, the engine kill switches will be on the same channel for quickest 17 shutoff. In addition, the controller can be pre-programmed so that if signal from the controller is lost, the kill switches can be automatically activated so the craft does not continue on out of control. Steering control will be performed by rotating the horizontal engine mounting plate around a single shaft in a thrust and radial bearing block in the center of the plate. This is achieved through the use of a high torque servo motor which will be directly attached to the mounting shaft. This complete assembly is shown in Figure 14 along with the parts list in Table 8. Figure 14: Steering Control Assembly Table 8: Main Parts List for Steering / RC Control Assembly Item Bearing Shaft Sprockets Chain Bearing Plate Supports Steering Motor Remote Control Servos Battery 6 Volts for Receiver Description Thrust and radial bearing w/ housing Shaft 10 tooth V-Series sprocket Size and length of chain Caster wheels to distribute load Ultra torque servo motor (manufacturer TBD) 6 Channel Small Servos 6.0V for more power (optional) Qty 1 2 1 6 1 1 5 1 18 5. Build and Construction 5.1. Thrust Powertrain The chain driven system was constructed as shown in Figure 15, with an additional support frame over the engine to support the fan shaft which included two bearings one being a thrust roller bearing. For safety reasons there is also an aluminum frame which encases the chain to protect any user from being able to touch as well as be hurt by the assembly. The final assembly can be seen in Figure 15 below. Once this assembly was built it was tested and found to have excessive vibration as well as chain slop, therefore a new design was proposed, see Figure 16. Figure 15: Chain Driven Thrust Assembly Construction Although the original design selected a chain driven system, this thrust assembly caused many more problems than originally anticipated. Due to the large force which the fan imposed on the drive shaft and support frame there was an extremely high degree of vibration which resulted in chain slop. In order to minimize the chain slop a chain tensioner was first installed, but was found not to have enough force to eliminate this vibration. Next an idler sprocket was installed to put tension on the chain with the overall same result. After having tested the thrust system with both types of tensioners it 19 was found that the welds in the corners of the support frames had started to crack due to excessive vibrations and force. After spending a substantial amount of time trying to get the chain driven system to perform to standard it was decided to abandon the chain assembly. In order to minimize the vibrations, a direct drive with a flexible coupling was installed. Although this option was looked at in the design selection it was abandoned due to the height of installation of the engine. It was found with the assembly on hand that the fan could be lowered and this would only result on increasing the height of the engine 5” which was deemed acceptable. With this decision in mind the direct drive system was constructed as can be seen in Figure 16. This new design also minimized the weight of the assembly for better performance. Figure 16: Final Thrust Assembly 5.2. Lift Powertrain During construction the design selection for the raised vertical fan with a funnel type front design selected in January was slightly altered to give a combination of two designs proposed. In late January to become more familiar with the construction of hovercrafts a local hovercraft expert Leo Cruickshank was approached and asked for suggestions on our proposed designs. One of the main suggestions he had was to put a larger hole in the 20 front of the craft as the amount of air we were using would be plenty to fill the skirt and the rest can go directly under the craft to create the intense pressure to lift the hovercraft. This design was then looked into in more detail and the construction of it would also be a lot simpler while there would also be an efficiency increase of the airflow. With this in mind the design was altered to be a combination of designs #2 and #4 where a raised vertical fan was used but was funneled directly down and only a third of the air was used to inflate the skirt. To do so a 19” diameter hole was put in the front of the top plate, as shown in Figure 17. There was also a slight design alteration in the support plate for this assembly. In the original design there were square type sections which were cut out of the plate for the airflow. When construction of this plate began it was decided upon that it is much easier to use two different radius‟ circles and create the same cross section for the airflow. Therefore as shown in Figure 17 the cut outs are actually round as opposed to the quadrilateral type shape originally designed. The final design constructed is shown in Figure 17. As shown in this photo, the air is ducted down from the fan into the skirt and directly under the hovercraft while the overall height proposed for the raised vertical fan was maintained. Figure 17: Lift Assembly Construction 21 5.3. Platform and Skirt Once again there was a slight design alteration made to the top plate due to the aforementioned visit with Leo Cruickshank. In order to synchronize the top plate design with the lift assembly the size and position of the air entry hole was changed. A 19” hole was cut, as shown in Figure 18, in replacement of the 6” hole and it was moved further towards the rear of the hovercraft. The final construction of the top plate can be seen in Figure 18. The skirt design was also changed to compensate for the lift assembly alterations. Because there is only a third of the air entering the skirt it was not found necessary to place any holes in the skirt as previously selected. The skirt was constructed to allow air to exit under the craft through the small gaps between the bolts on the inner perimeter where as the outside perimeter is air tight optimizing the use of the air. The final skirt design can be seen in Figure 19. The construction of the skirt was difficult as the shapes of the corners were not intuitive and therefore through an iterative process the proper shapes were cut and glued together and the overall design has performed very well. During construction of the skirt wire mesh was used to frame out the desired shape of the skirt so that when the loose fabric was draped in place it would hold the desired shape. This allowed a better visualization of the panels needed to shape the skirt so that the proper panels could be cut to shape the rear corners and the front radius so that when glued together created an effective skirt design which we wanted. During final application of the skirt onto the plate, waterproof caulking was used to seal the bolt holes, and on the outside bolt line of the skirt corner bead was layed so that it clamped the skirt 100% airtight and air could not leak on the outside of the craft. This bolting strip was deemed unnecessary because if any small holes occurred on the inside of the skirt it would only leak to the underside of the craft where it would aid in the lifting of the craft and would not be a performance loss. 22 Figure 18: Top Plate & Skirt Construction Top Figure 19: Top Plate & Skirt Construction Bottom 23 5.4. RC Controls The original design called for the use of a servo motor to rotate the thrust plate to give the steering control but problems arose with this design. The high torque servo motor was able to turn the assembly but the plastic attachments for the servo were quickly stripped due to the torque imposed upon them. A brass piece was then constructed but without the ability to make the inner splines for the servo it was impossible to get it to stop slipping. With this design problem in mind, Team 13 was able to borrow a previously used electric motor and gear box from Team 5 as it was undersized for their use. With this electric motor a speed controller was taken from an RC car and implemented to rotate the plate directly, see Figure 20. Figure 20: Steering Mechanism With the use of the electric motor and gear box the steering was then able to become very reliable and found to have excess power. 24 6. Testing In order to ensure that the designed and constructed hovercraft meets the design requirements as shown in Section 2: Design Requirements each of the requirements had to be specifically tested. Some of the design requirements were met without testing being required as the construction of the hovercraft itself ensured that the requirements would be met. The following section will outline each design requirement, testing methodology, the results of each test, as well as any conclusions or recommendations which were made post testing. 6.1. Size and Weight 6.1.1. Size This design requirement was fulfilled during the construction phase of the hovercraft and is therefore satisfied without testing; see Figure 21 and Figure 22. The craft plate was cut to fit within the criteria and sized at 4'x6'. Figure 21: Length Measurement 25 Figure 22: Width Measurement The size restriction set on the hovercraft was accomplished during fabrication and the hovercraft can successfully be carried by 3 people and placed in the back of a pickup truck as well. 6.1.2. Weight The maximum weight of 250 lbs was selected in order to be able to move the hovercraft around by 3 people with little restriction. The hovercraft was built in a piece set up where the lift and thrust assemblies can be removed as well for ease of transportation. In order to substantiate that the hovercraft met the maximum weight of 250 lbs the following steps were taken. 1. A digital scale was borrowed from the civil department. 2. The thrust assembly, lift assembly, and plate were all weighed separately, see Figure 23 for example of thrust assembly. 3. The sum of the weights is the total weight of the craft. The result of the maximum weight was that the hovercraft came in weighing in at 232.2 lbs. This is therefore a success for meeting this design requirement and does not require any further testing. For specific weight of each assembly see Table 9. 26 Table 9: Weight Testing Results Component Weight Top Plate 116.2 lbs. Thrust Assembly 74.8 lbs. Lift Assembly 41.2 lbs. Total 232.2 lbs < 250 lbs Figure 23: Weighing of Thrust Assembly 6.2. Safety Due to the inherent safety hazards with a moving craft with two high speed rotating fans safety is a major concern. We want to design a safe craft so we will concentrate our safety concerns with isolating the fans with shrouds and providing a kill switch to quickly shut down the craft 27 6.2.1. Shrouds In order to ensure the hovercraft can be used safely by any user the fans were required to be shrouded and the ability to reach them had to be restricted. This was done through the construction phase of the hovercraft. The shrouds are used to increase the efficiency of the fans and therefore were installed first. In order to reduce the chances of things getting into contact with the fans there was a chicken wire placed on both sides of the thrust shroud and on the upper side of the lift shroud. With these safety pieces constructed this design requirement was satisfied without testing. See Figure 24 and Figure 25 for shroud coverage. Figure 24: Shrouded Thrust Fan 28 Figure 25: Shrouded Lift Fan As the pictures above demonstrate the fans are adequately shrouded in order to protect the user while still allowing the fans to draw enough air to create the required cubic feet per minute of airflow. 6.2.2. Kill Switch The testing of this requirement is included in Section 6.5 ,see below 6.3. Twin Engine This design requirement was fulfilled during the construction phase of the hovercraft and is therefore satisfied without testing, see Figure 21. 6.4. Terrain One of the main capabilities of the hovercraft is established that it must be able to work on various types of terrain. This has been established through many other tests but is a simple pass or fail scale whether the hovercraft worked or didn‟t on these types of terrain. 1. Hovercraft was placed on the various surfaces. 2. Both engines were turned on. 3. Hovercraft was driven around and if performance was satisfactory a pass grade given. 29 Table 10: Terrain Testing Results Terrain Test # Pass Cement 1 X 2 X 3 X 1 X 2 X 3 X 1 X* Gravel Grass 2 Water Sand Fail X 3 X 1 X 2 X 3 X 1 X 2 X 3 X * only lift was tested on first test. Terrain tests were deemed a large success as the hovercraft was capable of operating on all smooth services, while grass provided it much difficulty to thrust. However literature available online shows that grass is one of the hardest surfaces for a hovercraft to traverse because the craft does not get good lift separation between the ground, grass, and skirt. On all other surfaces (cement, gravel, water, and sand) the hovercraft was able to both lift and thrust and steer adequately to provide control of operation. This test was also deemed a success, as in almost all cases the hovercraft was able to perform as desired. With respect to the low performance on grass, this could be solved through a more powerful motor in either lift, thrust, or both. This would allow the craft to lift higher and gain more separation, power through the separation which is already occurring, or both, respectively. 6.5. RC Controls The first design requirement was that the hovercraft must be remote controlled. This was selected instead of the proposed design of a manned hovercraft due to safety concerns. This design criteria was met as all the kill switches, throttles, as well as 30 steering are remote controlled. The steering is controlled through a speed controller which varies the speed of a gear reduced electric motor. The remote control design requirement was tested very simply. In order to substantiate that the remote control functions were functional, the following steps were demonstrated. 1. Hovercraft was placed in a well ventilated area and tied down. 2. The gas switch on the thrust engine was manually turned on as well as the choke. 3. The kill switches were tested to ensure the on/off capabilities were working before the engines were started. 4. The kill switches were then turned to the on position so the engines could be started. 5. The thrust engine was pull started manually to lift the hovercraft. 6. The lift throttle was then throttled up and down to demonstrate that the servo was in control of the throttle. 7. The thrust engine was then pull started manually and once started the choke was shut off manually. 8. Once the engine was running smoothly the thrust throttle was throttled up and down to demonstrate throttle control. 9. To ensure kill switches were working the kill switch was then turned off to verify that both engines would shut down. The servo motor controls of the kill switches as well as throttles worked well each and every time they were tested. The first test was a pure servo motor test as outlined in this section, it was a success. The kill switch testing photos are shown in Figure 26 and Figure 27. The throttle testing was also successful but no photos are shown in the report due to little range of throttle design. 31 Figure 26: Lift Kill Switch Testing Figure 27: Thrust Kill Switch Testing The servo testing was a full success in which all the servos used worked well. All of the custom servo mounts held the servos in place with little to no induced vibration from the motors. Over the series of tests which were conducted on the hovercraft this test is essentially repeated and there was not a single failure of the system. Every test outlined from this section is inherently retested every time the hovercraft is used and therefore is ultimately a success. 6.6. Payload The payload design criteria stated that the hovercraft should lift and move a minimum of 100lb payload. The 100lb payload was selected so the hovercraft overall weight with payload divided by its footprint was approximately 15 pounds per cubic feet, which is the upper range of a hovercrafts operating pressure. Testing of the payload is fairly simple, 100 lbs is to be fitted to the hovercraft platform, and then the hovercraft is to be started up to see if it will inflate its skirt and lift up as it would if it did not have a payload on it. 32 Testing results for the payload were extremely positive as the hovercraft was able to lift the 100lbs easily on all surfaces tested. With the additional weight, it took an additional second or two for the skirt to inflate and lift in comparison to the unloaded craft, this was deemed normal as it had to lift the additional weight. The hovercraft thrust also worked sufficiently, on all surfaces except grass (which was expected from the terrain clips). With the payload the thrust assembly turned the craft and pushed it forward, and similar to the lift assembly startup, it took slightly longer for the loaded craft to gain headway in contrast to the unloaded craft due to the extra force needed to build up to push the increased mass. The 100 lbs payload was achieved on all surfaces, including sand, grass, asphalt and pavement, (water was left out just as a precaution to not lose the weights in the lake). In some cases like on asphalt, gravel, and grass, the craft was capable of lifting up to 160 lbs. This however severely retards the thrust response. The payload criteria tests were deemed a success as the craft could lift the payload sufficiently and traverse with it on all terrain which it could traverse normally. Recommendations for payload are that a larger thrust engine would generate sufficient power as to provide more nimble operation of the craft under loaded situations. 6.7. Steering with Rotating Thrust Fan The most innovative piece constructed for the hovercraft was the rotating thrust fan which turns the thrust assembly instead of using a rudder system. In order to test this assembly the hovercraft is lifted and thrust turned on and the hovercraft is then steered using the remote control. The testing methodology for the steering mechanism was done through two tests. First, a basic test where the servo was used to turn the plate without the thrust fan on, and secondly, as a full scale test turning the hovercraft under full operation. Basic Test: 1. Hovercraft was fully assembled with thrust engine off. 2. Remote control was used to turn the thrust assembly both right and left. Full Test: 1. Hovercraft was placed outside on a flat surface. 33 2. The electronics were all set up and the lift and thrust engines turned on. 3. Once the hovercraft was driving the controller was used to maneuver the hovercraft right and left. 4. On thrust engine idle the turning radius to the right and left were recorded. The results for the steering tests were all once again successful. In the basic test where the electric motor was used to turn the plate without the thrust assembly on there were absolutely no problems, see Figure 28. 34 Figure 28: Basic Steering Test Results (Top to bottom: turning left, center, right) Based on the test results which are shown in the previous section the steering mechanism was shown to be performing well. The recommendation which is made is that the steering mechanism is not very affordable or realistic due to its constructability and complicated set up. If the hovercraft were to be mechanically driven as opposed to remote controlled then this would be a more viable alternative. 6.8. Buoyancy It is extremely important for a hovercraft to be able to float during an emergency shut down over water. This ensures that the craft itself and the payload can be recovered. 35 This was a simple test to perform in which was performed only once to ensure that the hovercraft was buoyant. 1. Hovercraft and all electronics were turned on. 2. The craft was driven onto water where team members had the craft roped off in case the craft did not float. 3. The kill switch was turned off and both the thrust and lift engines shut off. 4. The hovercraft was left to rest in the water to ensure buoyancy was met. During this test the hovercraft was started up and slid from the beach onto the water where it was then shut down. The hovercraft skirt deflated and the plate lowered to the water, where it then proceeded to float under no power and moved with the current. The flotation material which was installed in the skirt and underneath the craft to assist buoyancy provided sufficient buoyant force to keep the craft above water. This test was deemed a success because the hovercraft did float under an emergency shutdown condition. It was noticed however that under emergency shutdown the craft could not handle additional weight added to it and therefore it is recommended to add some more buoyant foam so that there is a larger factor of safety for buoyancy during shutdown. 6.9. Miscellaneous Criterion 6.9.1. Maximum speed (5 m/s or 18 km/h). The design criteria for a minimum speed of 5 m/s (18 km/h) was established in order to have an overall better performance than the hovercraft built in 2008-2009 at Dalhousie University. The testing of the speed test was conducted on pavement terrain as it is the best for performance hence why it was selected for the test. If time is adequate speed test will be completed on other surfaces. 1. Hovercraft was placed on a flat surface with adequate room to open full throttle. 2. A Garmin GPS unit was strapped down to the hovercraft to measure the velocity, see Figure 29 for an example of readout. 36 3. Controller was turned on, battery plugged in, and kill switch was put to the on position. 4. Lift engine was started following by the thrust engine. 5. Thrust engine was then throttled up to full throttle. 6. Once hovercraft meets what is perceived as max speed, the throttle was released and the kill switch turned off. 7. The GPS was removed and the average and maximum speeds are read off and recorded. The following are the results of the speed test on the hovercraft. Each measurement was repeated twice to ensure accuracy. Table 11 shows the test results for each of the various surfaces in which we were able to perform the speed testing on. An example of the Garmin GPS readout can be seen in Figure 29. Water is not included in this test as we did not want the Garmin GPS unit to get wet and therefore this was not completed. Figure 29: Garmin GPS Speed Readout 37 Table 11: Speed Test Results Terrain Test # Pavement Gravel Grass Water Avg. Speed (m/s) Max Speed (m/s) 1 1.81 (6.5 km/h) 5.47 (19.7 km/h) 2 3.44 (12.4 km/h) 6.36 (22.9 km/h) 1 2.92 (10.5 km/h) 4.33 (15.6 km/h) 2 2.72 (9.8 km/h) 3.97 (14.3 km/h) 1 <1 <1 2 <1 <1 1 N/A N/A 2 N/A N/A As shown in Table 11 the results of the speed test were mostly successful. The hovercraft performed really well on pavement and exceeded our design requirement of 5 m/s. Although on the gravel the craft did not meet the 5 m/s, the team believes that the craft performed effectively. The run which was used for the gravel test was less than 100 m in length and therefore the craft was not able to reach maximum speed. Given a longer run of gravel the team believes that the craft could meet the requirement of 5 m/s. Performance on grass was not admirable as there was too much friction which restricted the craft from travelling up to speed. This is usual as it is the toughest surface for hovercrafts to hover. Overall, the speed test was deemed a success. 6.9.2. Minimum hover height of 3” The design requirement of a minimum hover height of 3 inches was established in order for the hovercraft to be able to traverse across various rough terrains with rocks, etc. The testing of this requirement was very simple as it required only the thrust portion of the craft be activated. 1. Hovercraft was placed on the terrain listed below. 2. Lift engine was turned on and left at idle for first measurement of height (measurement taken between ground and bottom of plate) at both the front and back of hovercraft, see Figure 30 and Figure 31 respectively. 38 3. Lift engine was throttled up to full throttle and another measurement was taken for both the front and back. Figure 30 and Figure 31 show an example of the lift height being take on concrete at idle. This was repeated both at full throttle and idle for all of the different surfaces. Table 12 shows the results of the various hover height measurements. Figure 30: Hover Height Measurement (front) Figure 31: Hover Height Measurement (back) 39 Table 12: Hover Height Test Results Terrain Position Idle Height (inches) WOT Height (inches) Cement Front 8 8 Back 5.75 6.75 Front 8 8.25 Back 6.75 8 Front 8 8.25 Back 6.75 8 Gravel Grass The hovercraft performed admirably in this category as the skirt was well inflated at idle speed for the lift engine. The craft had trouble a bit more to get off of the grass surface due to the amount of air escape which happens because of the tendency of the grass. The center of gravity of the craft is also slightly to the back as can be seen by the hover heights being higher in the front then the back. This can be fixed with simple ballasting of the front. 6.9.3. Aesthetics Testing The aesthetic test is a very qualitative and subjective area and is therefore difficult to get an accurate test. However the team decided to design the craft as to give it a rounded looking front section, and finished in the raw, polished aluminum look to give it an attractive appearance. Testing data was taken by inquiring with people who viewed the craft what they thought of the overall appearance. A survey sheet was passed about classmates and acquaintances who viewed the craft and a poll showed the overall thoughts of its appearance as can be seen in Figure 32. As can be seen, the majority of people agree that the hovercraft does look aesthetically pleasing or 'good'. Although the largest majority opined that it would look better painted a stealthy 'matte black', while zero people referred to it as being 'ugly'. With this result in mind it is recommended to finish the hovercraft with a matte black appearance to gain maximum aesthetic benefits. 40 Figure 32: Aesthetic Poll Results 41 7. Budget The following section outlines a detailed budget of all the necessary parts which were purchased in order to build the hovercraft. Team 13 was able to find outside funding through the sponsorship of an anonymous source which donated the aluminum plate, Slipstream Hover which gave a 10% discount on the skirt material, and Leo Cruickshank owner of LE Cruickshanks Sheet Metal who donated the aluminum shrouds. The final budget can be seen in Table 13. The budget is within the allotted budget which the Department of Mechanical Engineering at Dalhousie University gave to Team 13. 42 Table 13: Final Budget 43 8. Conclusions In conclusion the twin-engine payload hovercraft project was deemed a success. The craft fulfilled virtually all design criteria which it set out to accomplish. The rotating steering fan which was the largest design departure from conventional hovercrafts proved itself a great success as the electric motor installed effortlessly rotated the engine and fan assembly and provided interactive steering and good performance. However the RC controls did provide some added difficulty to this as the original servo motor which was designed had adequate power but sufficient attachments were unavailable which could handle the repeated loading as they were made of plastic. It is recommended that if this design were to be scaled to a manned hovercraft, a direct steering linkage to a 'steering wheel' of sorts would easily provide power and responsiveness. This proof of concept was deemed a total success. The hovercraft overall performance was excellent on all surfaces with exception to grass. It performed in handling, lift, and thrust adequately on all other surfaces. To fix the grass performance deficiency, as stated before it is recommended to increase engine power so the craft can help overcome the added resistance of grass surfaces. In addition, additional thrust power would also help improve the performance of the craft under payload operations, and would also increase general performance on other surfaces more as well. Finally, we believe this project was also a huge success as it provided real world experience to the design of a physical entity and provided necessary challenges we worked to overcome to design around any issues which occurred such as the thrust vibrations. It also provided excellent first hand experience with the fabrication of the parts in the machine shop and the overall project provided an excellent experience in a teamwork environment. 44 References ASM Aerospace Specification Metals Inc. (n.d.). Aluminum 5052-H32. Retrieved from http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=MA5052H32. Engineering ToolBox. (2005). Air Temperature, Pressure and Density. Retrieved from http://www.engineeringtoolbox.com/air-temperature-pressure-densityd_771.html. Jackson, K., & Porter, M. (2004). Introduction to Radio Control Hovercraft. Germantown, MD: Flexitech LLC. National Aeronautics and Space Administration. (2008). General Thrust Equation. Retrieved from http://www.grc.nasa.gov/WWW/k-12/airplane/thrsteq.html. 45 Appendix A: Calculations Skirt Volume Calculation: Figure 33: Cross Sectional View of Skirt (Jackson, 2004, p. 68) (Introduction, 2004) Where, C = circumference of the skirt cross sectional area of skirt perimeter of hovercraft volume of skirt Buoyancy Calculation: The buoyancy calculation above assumes no loss of air when emergency recovery required, which will not be the case in reality. The craft does have more buoyancy than required but in order to add more safety to the craft buoyant materials will be added to increase this buoyancy ratio. 46 Thrust Calculation (National, 2008) Given Where, = volume flow rate of air = density of air at a given temperature and pressure Then the thrust (T) is defined as Where, = mass flow rate of air = discharge velocity of air = total cross sectional area of the fan Therefore, Convert the thrust to lbf, 47 Appendix B: Drawings 48