Optimal Control for a Scalar One-Step Linear System with Additive
advertisement

2010 American Control Conference
Marriott Waterfront, Baltimore, MD, USA
June 30-July 02, 2010
WeB10.1
Optimal Control for a Scalar One-Step Linear System with Additive Cauchy Noise
Moshe Idan, Amir A. Emadzadeh and Jason L. Speyer
Abstract— An optimal control scheme is developed for scalar
discrete linear dynamic systems driven by Cauchy distributed
process and measurement noises. Since the Cauchy density
has infinite variance, a cost function is defined for which the
unconditional expectation with respect to the Cauchy densities
produces a cost criterion that exists. After showing that this cost
criterion allows a dynamic programming solution for the multistage problem, an optimal controller is determined for one step
time update. Characteristics of the optimal controller is compared with the linear exponential Gaussian (LEG) controller.
The dramatic performance difference between the Cauchy and
the LEG controllers is studied. Furthermore, through different
numerical examples, some interesting properties of the Cauchy
controller are examined.
I. I NTRODUCTION
There are many engineering applications where one encounters random processes or noises which cannot be described by Gaussian probability distribution. Atmospheric
and underwater acoustic noises are examples and are the
governing noises in radar and sonar applications, which
have a very impulsive character [1]. A class of probabilistic
models used to represent impulsive noises is called stable
non-Gaussian or symmetric alpha-stable (Sα-S) distributions
(see [2] for a comprehensive treatment of Sα-S densities). In
this class, the Gaussian distribution corresponds to α = 2,
whereas α = 1 leads to the Cauchy probability density
function (pdf).
It has been shown that a Cauchy pdf better characterizes such impulsive types of sensor noise compared to the
Gaussian [3], [4]. For example, in detecting a radar signal
in clutter, it was shown that the in-phase component of
radar clutter time series agrees extremely well with a SαS pdf with α = 1.7 [3]. In that study both the maximum
likelihood Gaussian (MLG) and Cauchy (MLC) detectors
were developed. The result is that for all α ∈ [1, 2] the MLC
is very close to the Cramer-Rao bound, whereas the MLG
deviates significantly from the Cramér-Rao bound as α goes
from 2 to 1.
The above observations about the nature of the impulsive
noises and the robustness characteristics of the Cauchy
This work was partially supported by Air Force Office of Scientific
Research, Award No. FA9550-09-1-0374, and by the United States - Israel
Binational Science Foundation, Grant 2008040.
Moshe Idan is an Associate Professor at the Faculty
of Aerospace Engineering, Technion, Haifa, 32000, Israel.
moshe.idan@technion.ac.il
Amir Emadzadeh is a Post Doctoral Scholar at the the Mechanical &
Aerospace Engineering Department, University of California, Los Angeles,
CA 90024, USA. amire@ee.ucla.edu
Jason Speyer is a Professor at the Mechanical & Aerospace Engineering
Department, University of California, Los Angeles, CA 90024, USA.
speyer@seas.ucla.edu
978-1-4244-7425-7/10/$26.00 ©2010 AACC
detectors motivated the development of sequential estimators
for linear systems with additive Cauchy noises [5], [6].
Such heavy tailed pdfs do not posses well defined and/or
finite moments of any order [7], which make the associated
estimation problem significantly more challenging compared
to the Gaussian case.
Utilizing the characteristics and properties of the Cauchy
estimators in [5], [6], a new optimal control paradigm for
dynamic systems driven by Cauchy distributed noises is
developed in this paper. The main challenge is the fact that in
such systems the unconditional, time propagated pdf of the
system state is not defined. This requires posing a different
performance criterion than the ones normally used in, e.g.,
linear-quadratic-Gaussian (LQG) or robust control settings.
The rest of the paper is organized as follows. The optimal
control problem is formulated in Section II. A dynamic programming structure is developed in Section III. The solution
to the problem for one step time update is presented in
Section IV. The Gaussian equivalent optimal control problem
is presented, solved, and discussed in Section V. Numerical
examples are given in Section VI. Concluding remarks and
suggestions for future work are presented in Section VII.
II. P ROBLEM S TATEMENT
Consider the following linear, discrete-time, scalar
stochastic system,
xk = Φxk−1 + uk−1 + wk−1
(1a)
zk = xk + vk
(1b)
where xk is the state, uk is the control signal, zk is the
measurement, and k is the time index. The signals wk and vk
are process and measurement noise sequences, respectively,
that are assumed to be independent of each other and Cauchy
distributed with pdfs
β/π
, β>0
+ β2
γ/π
fVk (vk ) = 2
, γ > 0.
vk + γ 2
fWk (wk ) =
wk2
(2a)
(2b)
In addition, the initial state is assumed to be also Cauchy
distributed
α/π
, α > 0.
(3)
fX0 (x0 ) =
(x0 − x̄0 )2 + α2
In posing an optimal control problem for the model in
(1), the commonly used cost criteria, such as quadratic,
exponential, and more, cannot be used since the expectations
requited to evaluate those criteria are infinite when the system
noise inputs have Cauchy pdfs. Rather, in the context of the
1117
system with the heavy-tailed Cauchy noises it turns out that
a new criterion that resembles in its form the Cauchy pdf’s is
required to allow for an analytical derivation of a controller.
Note that the stochastic system (1) can be decomposed into
deterministic and stochastic parts by exploiting the linearity
of the system. Let x̄k and z̄k be deterministic, and x̃k and
z̃k be stochastic variables such that
xk = x̄k + x̃k
zk = z̄k + z̃k .
Then, the cost function is a product of the membership or
penalty functions of (8), defined by
ψ(XN , UN −1 ) =
=
(4a)
(4b)
N
−1
Mx (xk+1 )Mu (uk )
k=0
N
−1
k=0
1
1
· 2
.
2
x2k+1 + ηk+1
uk + ζk2
(10)
with initial condition x̄0 , and the stochastic part is given by
The optimal control problem is to maximize the unconditional expectation E [ψ(XN , UN −1 )] with respect to the
control history γ(0, N − 1), where E[·] is the unconditional
expectation. An important characteristic of this cost criterion
is that for the Cauchy densities the unconditional expectation
exists and therefore lends itself to a dynamic programming
solution, as demonstrated in the next section.
x̃k = Φx̃k−1 + wk
z̃k = x̃k + vk .
III. A DYNAMIC P ROGRAMMING S OLUTION
Then, the deterministic part is described by
x̄k = Φx̄k−1 + uk−1
(5a)
z̄k = x̄k
(5b)
(6a)
(6b)
The stochastic output is determined as the difference
between the actual measurements zk and the output of the
deterministic model, as z̃k = zk − z̄k . The process and
measurements noise pdfs were defined in (2a) and (2b),
while the initial condition of this stochastic model is Cauchy
distributed with
fX̃0 (x̃0 ) =
α/π
, α > 0.
x̃20 + α2
(7)
The above decomposition will be used to derive the onestep Cauchy controller.
A general cost criterion is defined which is compatible
with the Cauchy pdfs and is reminiscent of the choice of
the cost criterion for the linear-exponential-Gaussian (LEG)
[8]. There, a multiplicative cost composed of exponentials of
quadratic functions of the state and control, which resemble
Gaussians, are used to penalize these variables. An original
motivation was to think of these exponential functions as
membership function, as proposed in fuzzy set theory [9].
Here, these membership functions are chosen as a rational
polynomial. In particular, they take the form resembling a
Cauchy pdf, where the state and control are penalized using
the membership functions
Mx (xk ) =
x2k
1
,
+ ηk2
Mu (uk ) =
u2k
1
.
+ ζk2
Define the information sequence as
Ik+1 := {Ik , zk+1 , uk }, k = 0, . . . , N − 1, I0 = {z0 }.
(11)
Since Ik+1 uses the most up-to-date measurements, it is a
current information pattern.
Dynamic programming is applied by starting with the cost
function
J∗ =
max
γ(0,N −1)∈UN −1
=
∞ where Uk is the class of piecewise continuous functions of
Zk .
(12)
−∞
E [ψ(XN , γ(0, N − 1))]
max
E E ψ(XN , UN −1 ) IN
γ(0,N −1)∈UN −1
∞ max
=
u0
−∞
∞ max
u1
−∞
u2
−∞
∞
∞
∞
max
···
max
−∞
uN −1
−∞
ψ(XN , γ(0, N − 1))f (XN |IN ) dXN f (zN |IN −1 )dzN
· · · f (z3 |I2 )dz3 f (z2 |I1 )dz2 f (z1 |I0 )dz1 f (z0 )dz0
(8)
(9a)
(9b)
(9c)
E [ψ(XN , γ(0, N − 1))] .
Expanding the expectation on the right-hand side results in
Let the state, measurement, and control histories be defined as
Xk := {x0 , . . . , xk },
Zk := {z0 , . . . , zk },
γ(l, k) := {ul , . . . , uk }, γ(l, k) ∈ Uk
max
γ(0,N −1)∈UN −1
(13)
where f (· |· ) is the conditional density. The Fundamental
Lemma [8] was used to interchange the maximization and
expectation operations.
Since the strategy is to apply dynamic programming to
this problem, the optimization of (13) is manipulated into the
form of a recursion rule for the propagation of an optimal
1118
value function. To get this function, first note that
E ψ(XN , γ(0, N − 1)) Ik+1 =
max
γ(k+1,N −1)∈UN −1
∞ max
uk+1
∞
∞ max
uk+2
−∞
Cauchy control problem is stated as
1 z̃0
JC∗ = max E E
u0
x21 + η 2 C
C
(19)
= max E Ψ = E max Ψ
· · · max
u0
uN −1
−∞
ψ(XN , UN −1 )f (XN |IN ) dXN f (zN |IN −1 )dzN
−∞
· · · f (zk+3 |Ik+2 )dzk+2 f (zk+2 |Ik+1 )dzk+2
(14)
and
f (Zk+1 |γ(0, k − 1) ) dZk+1
= f (zk+1 |Ik )dzk+1 · f (zk |Ik−1 )dzk
· · · f (z2 |I1 )dz2 · f (z1 |I0 )dz1 f (z0 )dz0
(15)
where the conditioning on the control sequence given the
measurement sequence is not a random variable, and appears
only for notational convenience.
Using these two facts, the cost function can be more
compactly rewritten as
J∗ =
∞ max
−∞
u0
∞ ∞ ∞
∞ · · · max
max
max
−∞
u1
−∞
subject to (1), while, for simplicity, setting Φ = 1. JC∗
explicitly denotes the optimal Cauchy cost criterion, and
1 C
z̃0
Ψ =E
x2 + η 2 1
1
z̃0
=E
(20)
(x̃1 + x̄1 )2 + η 2 where x̄1 = x̄0 + u0 .
The optimal control problem is to find the control signal
at k = 0, u∗0 , such that it maximizes the cost function (19)
given the measurement at time k = 0, i.e.
u∗0 = arg max ΨC .
To maximize the cost function (20), the conditional pdf
fX̃1 |Z̃0 (x̃1 |z̃0 ) is needed. It is computed following the steps
presented in [5], [6]. Using the Chapman-Kolmogorov equation, it can be computed as
∞
fX̃1 |Z̃0 (x̃1 |z̃0 ) =
max
γ(k+1,N −1)
(22)
The conditional density function fX̃0 |Z̃0 (x̃0 |z̃0 ) is constructed as
fX̃0 |Z̃0 (x̃0 |z̃0 ) =
E ψ(XN , γ(0, N − 1)) Ik+1
f ( Zk+1 |γ(0, N − 1)) (17)
Jk∗ (Ik ) = max
uk
∗
Jk+1
(Ik+1 ) dzk+1 .
Although a dynamic programming recursion exist, the solution maybe difficult to obtain analytically. Hence, initially,
to understand the properties of the optimal control problem,
the simplest Cauchy control problem is first considered in
the next section. In particular, the maximization indicated in
(18) is performed only for k = 0.
IV. O NE -S TEP C AUCHY O PTIMAL C ONTROLLER
fZ̃0 (z̃0 )
.
(23)
fX̃0 ,Z̃0 (x̃0 , z̃0 ) = fZ̃0 |X̃0 (z̃0 |x̃0 ) fX̃0 (x̃0 )
= fV0 (z̃0 − x̃0 )fX̃0 (x0 )
γ/π
α/π
=
·
.
(z̃0 − x̃0 )2 + γ 2 x̃20 + α2
(18)
−∞
fX̃0 ,Z̃0 (x̃0 , z̃0 )
The joint density function fX̃0 ,Z̃0 (x̃0 , z̃0 ) is computed
using the measurement equation (6b) and the noise pdf (2b),
and is given by
the sought after dynamic programming recursion rule becomes
∞
fX̃1 |X̃0 (x̃1 |x̃0 ) fX̃0 |Z̃0 (x̃0 |z̃0 ) dx̃0 .
−∞
If the optimal value function is defined as
∗
Jk+1
(Ik+1 ) (21)
u0
uk
−∞ E ψ(XN , γ(0, N − 1)) Ik+1
max
γ(k+1,N −1)∈UN −1
. (16)
f (Zk+1 |Uk ) dZk+1 · · ·
−∞
u2
u0
(24)
Since z̃0 is a sum of two Cauchy random variables, it is
a Cauchy random variable with
fZ̃0 (z̃0 ) =
(α + γ)/π
.
z̃02 + (α + γ)2
(25)
From (23), (24) and (25), and using a standard partial
fraction expansion, the conditional pdf fX̃0 |Z̃0 (x̃0 |z̃0 ) is
given by
Initially, the cost function of (12) will include the state
xk only with N = 1 and hence k = 0. Thus, the optimal
1119
fX̃0 |Z̃0 (x̃0 |z̃0 ) =
a1 x̃0 + b1
a2 x̃0 + b2
+
2
2
2
x̃0 + α
z̃0 − x̃0 + γ 2
(26)
where
a1 = 2z̃0 C = −a2
(27a)
b1 = [z̃02 + γ 2 − α2 ]C
(27b)
b2 = [3z̃0 − γ 2 + α2 ]C
1
αγ/π
·
.
C=
α + γ z̃02 + (α − γ)2
Next, from (6a) and
fX̃1 |X̃0 (x̃1 |x̃0 ) is given by
(2a),
fX̃1 |X̃0 (x̃1 |x̃0 ) = fW0 (x̃1 − x̃0 ) =
the
conditional
(27c)
(27d)
pdf
β/π
. (28)
(x̃1 − x̃0 )2 + β 2
Substituting (26) and (28) into (22) and solving the
integral, the conditional pdf fX̃1 |Z̃0 (x̃1 |z̃0 ) is determined as
fX̃1 |Z̃0 (x̃1 |z̃0 ) =
where
c1 =
Note that ζ here is the weighting parameter. If it is small,
it puts more constraints on u0 . Hence, the control signal is
expected to become more suppressed compared to the unweighted case. As ζ becomes larger, the optimal control is
expected to converge to the un-weighted controller since the
control signal is less penalized.
V. G AUSSIAN O PTIMAL C ONTROLLER
To compare the performance of the Cauchy controller
with, for example, one that is designed assuming Gaussian
noises, one has to consider: (a) the parameters of the Gaussian pdfs that best approximate the the Cauchy pdfs, and (b)
the cost criterion used to design the Gaussian controller to
be comparable to the one used in the Cauchy noise setting.
Those two items are addressed first in this section, following
the solution to the Gaussian controller problem.
a1 x̃1 + c1
a2 x̃1 + c2
+
2
A. Normal pdf Least Squares Fit of a Cauchy pdf
+ (α + β) [x̃1 − z̃0 ]2 + (γ + β)2
(29)
To construct a normal or Gaussian pdf that best fits a given
Cauchy pdf, the following optimization problem is solved
x̃21
α+β
b1 ,
α
c2 =
β
γ+β
z̃0 a2 +
b2 .
γ
γ
Using the conditional pdf (29), and performing the integration associated with the conditional expectation in (20),
the Cauchy control cost function is evaluated analytically as
η+α+β
η(α+β) c1
a1
α (u0
∞ 2
C
N
fX
(x) − fX
(x) dx,
σ = arg min
(30)
+ x̄0 ) +
1 C
Ψ =
2
π
u0 + x̄0 + (η + α + β)2
η+γ+β
+ u0 + x̄0 ) + η(γ+β)
c2
+
. (31)
2
z̃0 + u0 + x̄0 + (η + γ + β)2
∗
σ
d C
Ψ = 0.
(32)
du0
Since the expression in (31) is fairly complex, in the sequel
we will analyze several numerical cases, in an attempt to
deduct some general results for the minimization problem at
hand.
As in standard LQG or LEG problems, one may be
interested in weighting the control signal in the cost function,
as was presented in (10). With N = 1, the optimal cost
function for this case is
1
1 z̃0 ,
(33)
·
ΨCw = E
x21 + η 2 u20 + ζ 2 where the notation ΨCw is introduced to distinguish the case
with control signal weighting from ΨC that weights the state
only. Therefore, from (20)
ΨCw =
u20
1
ΨC .
+ ζ2
(34)
The optimal control signal may be found by solving
d C
Ψ = 0.
du0 w
(35)
−∞
where the Cauchy pdf is
δ/π
, δ>0
x2 + δ 2
and the normal pdf is given by
C
(x) =
fX
2
a2
γ (z̃0
To find the optimal controller defined in (21), the following
equation must be solved
(36)
N
fX
(x) =
(37)
2
e−x /(2σ )
√
, σ > 0.
2πσ
(38)
Solving (36) analytically leads to a complex nonlinear equation relating σ ∗ to δ. Solving the latter numerically yields
σ ∗ = k0 δ,
k0 ≈ 1.4.
(39)
Hence, the equivalent corresponding pdfs for the Gaussian
optimal control problem are chosen as
2
e−(x0 −x̄0 ) /(2M0 )
√
, M0 = k02 α2
2πM0
2
e−wk /(2W )
fWk (wk ) = √
, W = k02 β 2
2πW
2
e−vk /(2V )
√
fVk (vk ) =
, V = k02 γ 2 .
2πV
fX0 (x0 ) =
(40a)
(40b)
(40c)
B. Linear Exponential Gaussian (LEG) Controller
To best approximate the Cauchy cost criterion of (33), in
the Gaussian case an exponential cost criterion is chosen,
given by
−(qx21 +ru20 ) (41)
ΨN
z̃0 .
w =E e
Similarly to fitting the pdfs discussed above, the parameters
in the Gaussian cost can be chosen to best fit the Cauchy
cost. That is,
1
1
(42)
q = 2 2, r = 2 2.
2k0 η
2k0 ζ
1120
The LEG problem for the model in (1) and noise characteristics in (40) were addressed in [8]. The optimal controller
is given by
(43)
u∗0 = −Λ0 [1 + 2P0 S0 ]−1 x̂0
where
q
q + r + 2qrW
k 2 α2 γ 2
P0 = 02
α + γ2
qr
.
S0 =
q + r + 2qrW
Λ0 =
Thus the optimal controller can be expressed as
q
u∗0 = −
x̂0 .
q + r + 2qr(P0 + W )
(44)
K = P0 V
α2
= 2
.
α + γ2
Equation (55) is a 3rd order polynomial, whose solution
is fairly complex. Adding measurement noise, i.e γ = 0,
increases the order of the polynomial, and makes it even
harder to solve, thus demonstrating the difficulty in solving
the Cauchy optimal control problem.
VI. N UMERICAL E XAMPLES
(46)
(47)
(48)
where
−1
2u∗0 3 + 3z̄0 u∗0 2 + [ζ 2 + (η + β)2 + z̄02 ]u∗0 + ζ 2 z̄0 = 0. (55)
(45)
Furthermore, x̂0 can be computed as
x̂0 = x̄0 + K z̃0
and, from (35), the optimal control satisfies
(49)
Substituting the parameters q, r, W , and P0 into (47)
shows that the slope of u∗ with respect to z0 is independent
of k0 . In other words the corresponding parameters of the
Gaussian cost function may be chosen as q = 1/η 2 and
r = 1/ζ 2 .
This LEG controller is called risk adverse when r and
q are positive. If r and q are negative, then the controller
is an H∞ controller [8]. However, this type of cost is not
allowed for the Cauchy densities, because the unconditional
cost criterion will not exist.
If the control signal is not included in the cost function
(41), i.e. r = 0, the LEG cost function becomes,
2
(50)
ΨN = E e−qx1 z̃0 .
Through some numerical examples, the characteristics of
the Cauchy optimal controller, obtained from either (32) or
(35), is studied for both un-weighted and weighted control
scenarios. For each case, the results are compared against
the equivalent LEG controller, obtained from (51) or (47),
respectively.
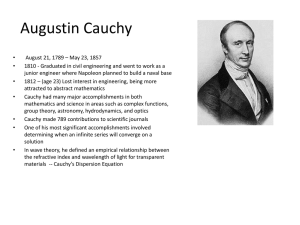
A. Nominal Example
First the un-weighted control scenario is considered. The
parameters for Cauchy signals are chosen as
α = 3, β = 3, η = 1, γ = 5, x̄0 = 0.
Substituting these parameters into (31), the cost function
becomes
3(29z 2 + 20uz − 288)
1 C
Ψ =
π
16(z 2 + 4) ((u + z)2 + 81)
10(7z 2 − 6uz + 112)
+
16(z 2 + 4)(u2 + 49)
α = 3, β = 3, γ = 5, η = 1, x̄0 = 0
0.06
0.05
0.04
ΨC
(51)
C. Discussion
(57)
where 0 and ∼ in z̃0 and u0 are dropped for brevity. The
cost function is plotted in Fig. 1.
In this case, from (44) and (46), Λ0 = 1 and S0 = 0.
Therefore, using (43), the optimal controller is independent
of q and is given by,
u∗0 = −x̂0 .
(56)
0.03
0.02
Consider the case where there is no measurement noise,
i.e. γ = 0. Hence, from (31), the Cauchy cost function
becomes
η+β
1 C
η
Ψ =
.
(52)
π
(z̄0 + u0 )2 + (η + β)2
0.01
0
50
50
0
0
Using (32), the optimal control equals
u∗0
= −z̄0 = −x̄0
z0
(53)
which is the same as Gaussian optimal controller obtained
from (48).
Furthermore, the weighted Cauchy cost function becomes
η+β
1
1 C
η
Ψw = 2
·
π
u0 + ζ 2 (z̄0 + u0 )2 + (η + β)2
Fig. 1.
−50
−50
u0
Cost function for Example VI-A.
The optimal controller can be obtained by minimizing (57)
with respect to u. This required the solution of
(54)
1121
l 5 u 5 + l 4 u 4 + l3 u 3 + l 2 u 2 + l 1 u + l 0 = 0
(58)
α = 3, β = 3, γ = 5, η = 1, x̄0 = 0
where
10
l4 = 92z
2
(59a)
8
(59b)
6
l3 = 6(2016 + 25z )
(59c)
l2 = z(19176 + 125z 2 )
(59d)
l1 = 7(94176 + 1290z 2 + 5z 4 )
(59e)
l0 = 147z(1476 + 5z 2 ).
(59f)
Cauchy
Gaussian
4
2
u*
l5 = 32
0
−2
−4
−6
−8
−10
−30
−20
−10
0
10
20
30
z0
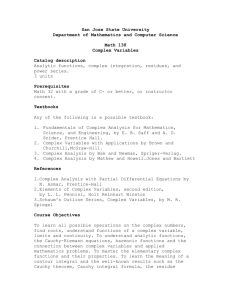
Fig. 2.
Optimal controllers for Example VI-A.
α = 3, β = 3, γ = 5, η = 1, x̄0 = 0
0.08
Cauchy
Gaussian
0.07
0.06
*
0.05
Ψ
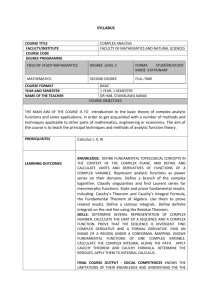
Equation (58) is solved numerically, and the optimal control signal is plotted in Fig. 2 along with the LEG controller,
obtained from (51). The cost function (20) evaluated with
both the Cauchy optimal control and the LEG controller is
plotted in Fig. 3.
Fig. 2 shows that the Cauchy controller is symmetric
and linear about z̃0 = x̄0 = 0. Interestingly, its slope is
nearly identical to that of the LEG controller. Furthermore,
the figure shows that the Cauchy controller approaches zero
when |z̃0 | becomes large, while the Gaussian controller
remains linear with respect to the measurement z̃0 . This is
a significant difference between the Cauchy and Gaussian
optimal controllers, which can be deducted analytically from
(58). Since u∗ is finite, the dominant term in (58) as |z̃0 | →
∞ is l1 u∗∞ , or lim|z̃0 |→∞ u∗∞ → 0.
A similar conclusion can be deducted by examining the
variance of the estimation error at k = 0, which is given by
[5]
z̃02
2
ˆ
+1 .
(60)
E (x̃0 − x̃0 ) z̃0 = αγ
(α + γ)2
0.04
0.03
Equation (60) shows that the variance of estimation error
grows unboundedly when z̃0 increases. Hence, the optimal
Cauchy control strategy correctly reduces the controller gain
when the estimation error variance is increasing dramatically.
This difference in the control strategy between the Cauchy
and LEG controller results can be seen from better expected
performance of the former, as presented in Fig. 3. There,
one can clearly observe that the cost function ΨC > ΨN for
large |z̃0 |.
0.02
0.01
0
−30
−20
−10
0
10
20
30
z0
Fig. 3.
Optimal cost function for Example VI-A.
B. Changing x̄0
In this example the offset parameter x̄0 in (56) is changed
to x̄0 = 5. For this case, the coefficients of (58) are computed
as (Note: z = z0 = z̃0 + x̄0 )
l5 = 37z 2 − 505z + 1856
3
2
4
3
(61a)
l4 = 157z − 1565z + 1236z + 19720
(61b)
2
l3 = 300z − 2860z + 27196z − 239720z + 849468
(61c)
l2 = 250z 5 − 1750z 4 + 32756z 3 − 187380z 2 − 592542z
+ 5636730
(61d)
l1 = 70z 6 + 400z 5 + 4590z 4 + 78760z 3 − 78498z 2
− 9815700z + 49314906
(61e)
l0 = 350z 6 − 2780z 5 + 67450z 4 − 138228z 3 + 998670z 2
− 28884924z + 137064150.
(61f)
The Cauchy optimal controller is plotted along with the
LEG control signal in Fig. 4. The plots show that the Cauchy
controller is almost linear and symmetric about x̄0 = 5.
Furthermore, the slope has not changed compared to the
Example VI-A. This can be expected from (31), where x̄0
shows a shifting effect. As |z̃0 | grows, the Cauchy control
signal approaches −x̄0 = −5. This fact can be verified using
(61e) and (61f), where u∗∞ = −l0 /l1 → −5 as |z̃0 | → ∞.
C. Changing η
In this example the parameter η that expresses the width
of the membership function in (20) is varied. Here η = 5 is
1122
α = 3, β = 3, γ = 5, η = 1, x̄0 = 5
α = 3, β = 3, γ = 5, η = 5, x̄0 = 0
4
8
Cauchy
Gaussian
Cauchy
Gaussian
2
6
0
4
−2
2
u
u*
*
−4
0
−6
−2
−8
−10
−4
−12
−6
−14
−30
−20
−10
0
10
z
Fig. 4.
20
30
−8
−30
40
−20
−10
0
10
Optimal controllers for Example VI-B.
Fig. 5.
chosen, leading to the cost function
30
Optimal controllers for Example VI-C.
where
1 C
3(−416 + 20uz + 33z 2 )
Ψ =
π
80(z 2 + 4) ((u + z)2 + 169)
−176 + 6uz − 11z 2
. (62)
+
8(z 2 + 4)(u2 + 121)
l7 = 64
(66a)
l6 = 196z
l5 = 22336 + 297z
(66b)
2
(66c)
l4 = 5z(7940 + 47z 2 )
The coefficients in (58) become (Note: z = z̃0 )
(66d)
l3 = 2(792288 + 12633z 2 + 35z 4 )
l5 = 64
l4 = 184z
(63a)
(63b)
l2 = 987612z + 6250z
l3 = 36608 + 270z 2
(63c)
2
l2 = z(58768 + 205z 2 )
(63d)
l1 = 11(363584 + 2410z 2 + 5z 4 )
(63e)
l0 = 363z(3848 + 5z 2 ).
(63f)
As in the previous examples, Fig. 5 shows the slope of
Cauchy controller has not changed due to a change in η.
This behavior is similar to the LEG controller, whose slope
is independent of q when r = 0.
D. Weighted Controller
In the following two examples, cost functions are examined that weight specifically the control signal u0 .
1) ζ = 1: In this example the Cauchy cost parameters are
given in (56) while setting ζ = 1 in (34).
Using (55), the optimal control is found when there is no
measurement noise, by solving
2u∗0 3 + 3z̄0 u∗0 2 + [17 + z̄02 ]u∗0 + z̄0 = 0.
20
z0
0
(64)
The resulting optimal controller is plotted in Fig. 6.
Using (42), the LEG cost function parameters in (41) are
chosen as q = 1/η 2 = 1 and r = 1/ζ 2 = 1. From (35), the
Cauchy optimal controller is found by solving
l7 u 7 + l6 u 6 + l 5 u 5 + l 4 u 4 + l 3 u 3 + l 2 u 2 + l 1 u + l0 = 0
(65)
(66e)
3
(66f)
2
4
l1 = 7(3523392 + 63471z + 250z )
l0 = 147z(1476 + 5z ).
(66g)
(66h)
The LEG controller is determined from (47).
Both controllers are plotted in Fig. 6. Surprisingly, the
Cauchy controller still shows a linear behavior about x̄0 .
Furthermore, its slope is slightly different from the slope of
the LEG control signal. Also, the symmetric property of the
controller about z̃0 = x̄0 and its asymptotic behavior when
|z̃0 | → ∞ is preserved.
A noticeable difference, as expected, is that the control
signal is suppressed compared to the previous cases. This is
the direct effect of penalizing u0 in the cost function.
It is also interesting to note that when the measurement
is perfect, the control signal acts in a similar manner to the
case where the measurement is noisy.
2) ζ = 104 : The weighting parameter is increased to ζ =
104 .
First, using (55), the optimal control is found when there
is no measurement noise. The control signal satisfies
2u∗0 3 + 3z̄0 u∗0 2 + [108 + 1 + z̄02 ]u∗0 + 108 z̄0 = 0.
(67)
As expected, the optimal control is the same as the case
where the control signal is not weighted, i.e. u∗0 = −z̄0 , as
stated in V-C.
The equivalent Gaussian parameters are q = 1, and
r = 10−4 . In both cases, those parameters correspond to
1123
α = 3, β = 3, η = 1, ζ = 10000, x̄0 = 0
α = 3, β = 3, η = 1, ζ = 1, x̄0 = 0
10
0.2
Cauchy, γ=5
Gaussian
Cauchy,γ=0
0.15
Cauchy, γ=5
Gaussian
Cauchy,γ=0
8
6
0.1
u*
u*
0.05
0
4
q=1
2
r = 1e-008
0
−2
−0.05
−4
−0.1
−6
−0.15
−8
−0.2
−30
−20
Fig. 6.
−10
0
z0
10
20
−10
−30
30
−20
−10
0
z
10
20
30
0
Fig. 7.
Optimal controllers for Example VI-D.1.
a significant decrease in the weighting of the control signal.
Thus it is expected that the resulting control signals will be
nearly identical to those obtained in Example VI-A, where
there was no weighting on the control signal.
In this case, the coefficients in (65) are
l7 = 64
l6 = 196z
(68a)
(68b)
l5 = 3200022304 + 297z 2
(68c)
2
l4 = z(9200039608 + 235z )
(68d)
2
4
l3 = 2(604800786240 + 7500012558z + 35z )
2
l2 = z(1917600968436 + 12500006125z )
(68e)
(68f)
2
l1 = 7(9417603429216 + 129000062181z + 500000245z 4 )
(68g)
l0 = 14700000000z(1476 + 5z 2 ).
(68h)
The optimal controllers are plotted in Fig. 7. As expected,
the plots show that the Cauchy controller converges to the
optimal control signal for the case with no control weighting.
VII. C ONCLUSIONS AND F UTURE W ORK
A new mathematical framework was developed for optimal
control problems when the dynamic system is driven by
Cauchy distributed signals. This entailed a newly developed
cost function, addressed through dynamic programming. As
an initial step, one time-step controller was derived and examined analytically. The results where compared against an
equivalent LEG controller. It was shown that both controllers
behave in a similar way when the measurement values
are small. A dramatic difference was observed between
the two controllers when the measurement values become
large. The Cauchy optimal controller saturates when the
measurement value increases, while the LEG controller is
always linearly proportional to the measurements. To extend
the results, it is necessary to obtain the general properties of
Optimal controllers for Example VI-D.2.
the Cauchy controller. Furthermore, the optimal controller
must be determined for each time update. In addition, a
dynamic programming framework must be developed for the
proposed optimal control problem. These will be considered
in future studies, utilizing the insights presented in this
current work.
R EFERENCES
[1] E. E. Kuruoglu, W. J. Fitzgerald, and P. J. W. Rayner, “Near Optimal
Detection of Signals in Impulsive Noise Modeled With Asymmetric
alpha-stable Distribution,” IEEE Communications Letters, vol. 2, no. 10,
pp. 282–284, Oct. 1998.
[2] G. Samorodnitsky and M. S. Taqqu, Stable Non-Gaussian Random
Processes: Stochastic Models with Infinite Variance.
New York:
Chapman & Hall, 1994.
[3] P. Tsakalides and C. L. Nikias, Deviation from normality in statistical
signal processing: Parameter estimation with alpha-stable distributions;
in A Practical Guide to Haevy Tails: Statistical Techniques and Applications. Boston: Birkhauser, 1998, pp. 379–404.
[4] G. A. Tsihrintzis, Statistical Modeling and Receiver Design for MultiUser Communication Networks. Boston: Birkhauser, 1998, pp. 379–
404.
[5] M. Idan and J. L. Speyer, “Cauchy Estimation for Linear Scalar
Systems,” in IEEE Conference on Decision and Control, Cancun,
Mexico, 2008, pp. 658 – 665.
[6] ——, “Cauchy Estimation for Linear Scalar Systems,” IEEE Transactions on Automatic Control, vol. 55, no. 5, May 2010.
[7] L. N. Johnson, S. Koltz, and N. Balakrishnan, Continuous Univariate
Distributions. John Wiley & Sons, Inc., 1994, vol. 2, ch. 16.
[8] J. L. Speyer and W. H. Chung, Stochastic Processes, Estimation, and
Control, 1st ed. SIAM, 2008.
[9] H.-J. Zimmermann, Fuzzy Set Theory and its Applications, 4th ed.
Springer, 2001.
1124