Intelligent Control Systems
advertisement

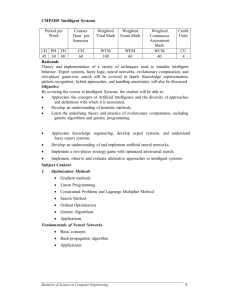
SYLLABUS (Major in Automation) 1. Subject: INTELLIGENT CONTROL SYSTEMS 2. Credits: 2 (Lecture 30 hours; Lab 15 hours) 3. Lecturer: Dr. HUỲNH THÁI HOÀNG ; Dr. NGUYỄN ĐỨC THÀNH; Dr. NGUYỄN THIỆN THÀNH 4. Department: Automatic Control 5. Prerequisites: 6. Corequisites: 7. Subject objectives: To provide students with general knowledge about intelligent control techniques and their applications in industry. 8. Subject description: The course discusses methods for the analysis and design of intelligent control systems. The main topics include: general characteristics and structures of intelligent control systems; methods for design knowledge-based control systems, model-based control systems, intelligent adaptive control systems and learning control systems using soft computing techniques such as neural networks, fuzzy logic and genetic algorithm; foraging theory and applications in control; examples of intelligent control systems in industry. 9. Contents: 9.1 CLASS LECTURES: 45 hours Chapter 1 Topic Introduction 1.1 Intelligent control concept Hours Ref. 6 [1],[2], [3],[4] 6 [1],[2] 6 [1],[2] 1.2 General characteristics of intelligent control systems 1.3 Disciplines related to intelligent control 1.4 Neural networks 1.5 Fuzzy systems 1.6 Genetic algorithms Direct Control 2.1 Fuzzy direct control 2.2 Fuzzy PID controller 2 2.3 Stability of fuzzy logic control system 2.4 Direct control using neural networks 2.5 Self turning of direct controllers using genetic algorithms Neural/Fuzzy Model Based Control 3.1 Neural/fuzzy models of nonlinear systems 3 3.2 Inverse control 3.3 Internal model control 3.4 Model reference control 3.5 Model-based predictive control Adaptive control and learning control 4.1 Neural/fuzzy indirect adaptive control 4 6 [1],[2] 3 [2] 3 [1],[2], [3],[4] 4.2 Neural/fuzzy direct adaptive control 4.3 Parameter learning control 4.4 Structure learning control Control using foraging theory 5.1 Introduction to foraging theory 5.2 Cooperative foraging 5 5.3 Competitive foraging 5.4 Intelligent foraging 5.5 Optimization and control of robot team based on foraging strategies Intelligent control systems 6.1 Hierarchical structure of intelligent control systems 6 6.2 Basic elements of intelligent control systems 6.3 Examples of intelligent control systems in industries 6.4 Intelligent control research directions 9.2 LAB EXPERIMENTS: 15 hours TT Experiments Hours Lab 1 Fuzzy control of inverted pendulum 3 Digital Control and System Engineering. Building C6 2 Fuzzy control of magnetic levitation system 3 Digital Control and System Engineering. Building C6 3 Seft tuning of fuzzy controller for flexible link robot using genetic algorithm 3 Digital Control and System Engineering. Building C6 4 Predictive control of a cascade tank using neural networks/fuzzy model 3 Digital Control and System Engineering. Building C6 5 Fuzzy/neural adaptive control of a helicopter model 3 Digital Control and System Engineering. Building C6 10. References: Ref. [1] Huỳnh Thái Hoàng [2] Kelvin M. Passino [3] Adrian A. Hopgood [4] Panos J. Antsaklis, Kelvin M. Passino (Eds) Intelligent Control Systems, VNU-HCM Publisher, 2006 (in Vietnamese) Biomimicry for Optimization, Control and Automation, Springer, 2006 Inteligent Systems for Engineers and Scientists, CRC Press, 2001 An Introduction to Inteligent and Autonomous Control, Kluwer Acadamic Publisher, 1993. 11. Assessment: No. Assessment method Times Weight (%) 1 Mid-term examination 0 0 2 Experiment 1 20 3 Homework 4 40 4 Final examination 1 40 Head of the Department Lecturer (Full name and signature) (Full name and signature)