Lecture notes
advertisement

IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Training /Workshop programme on Wind profiler and Radio
Acoustic Sounding System
Signal detection and Processing techniques for
Atmospheric radars
Dr. V.K.Anandan
National MST Radar Facility
Dept. of Space
1
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
1. Introduction
RADAR is the acronym for Radio Detection and Ranging. The radar
invention has its roots in the pioneering research during nineteen twenties by Sir
Edward Victor Appleton in UK and Breit and Tuve (1925) in USA on the
detection of ionization layers in the upper atmosphere. The radar works on the
principle that when a pulse of electromagnetic waves is transmitted towards a
remotely located object, a fraction of the pulse energy is returned through either
reflection or scattering, providing information on the object. The time delay with
reference to the transmitted pulse and the received signal power provide
respectively the range and the radar scattering cross-section of the target detected.
These class of radars are known as pulse radar. In case the target is in motion
when detected, the returned signal is Doppler shifted from the transmitted
frequency and the measurement of the Doppler shift provides the line-of-sight
velocity of the target. The radars having this capability are referred to as pulse
Doppler radars. In addition to the above, if the location of the target is to be
uniquely determined, it is necessary to know its angular position as well. The
radars having this capability employ large antennas of either phased array or dish
type to generate narrow beams for transmission and reception. Two major radars
of this kind used for scientific research are the phased array radar of Jicamarca
and dish antenna radar of Arecibo. Two important parameters that characterize
the capability of a radar are its sensitivity and resolution for target detection. The
sensitivity is determined by the peak power-aperture product and the resolution
by the pulse volume which depends on the pulse length and the radar beam width.
2
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
There are several variants to the above type of pulse radars that have been
developed with varying degrees of complexity to meet the demands of application
in various fields.
2. Atmospheric Radars
Radar can be employed, in addition to the detection and characterization of
hard targets, to probe the soft or distributed targets such as the earth’s
atmosphere. The atmospheric radars of interest to the current study are known as
clear air radars and they operate typically in the VHF (30 –300 MHz) and UHF
(300 MHz – 3GHz) bands (Rotteger and Larsen, 1990). The turbulent fluctuations
in the refractive index of the atmosphere serve as a target for these radars
There is another class of radars known as weather radars which serve to
observe the weather systems and they operate in the SHF band (3- 30 GHz)
(Doviak and Zrnic, 1984). A major advance has been made in the radar probing
of the atmosphere with the realization in early seventies, through the pioneering
work of Woodman and Guillen (1974), that it is possible to explore the entire
Mesosphere-Stratosphere-Troposphere (MST) domain by means of a high power
VHF backscatter operating ideally around 50 MHz. It led to the concept of an
MST radar and this class of radars have come to dominate the atmospheric radar
scene over the past few decades.
An MST radar is a high power phase coherent radar operating typically
around 50 MHz with an average power-aperture product exceeding about 5x107
Wm2. Radars operating at higher frequencies or having smaller power-aperture
products are termed ST (Stratosphere-Troposphere) radars. In arriving at an
optimum radar frequency for MST application, the main considerations are the
frequency dependence of radar reflectivity for turbulent scatter and possible
interference from other sources of sporadic nature. The weak radar reflectivity of
3
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
the turbulent scatter coupled with a requirement of a few tens of meters of range
resolution has called for the application of pulse compression and advanced signal
and data processing techniques. In the next few sections are presented some of the
basic concepts on pulse compression and signal and data processing as applied to
the MST radars, which form the background to the study.
3. Signal Detectability and Pulse Compression
The efficiency of the radar system depends on how best it can identify the
echoes in the presence of noise and unwanted clutter. The important parameters
from the system point of view influence the radar returns are the average power
of transmission and the antenna aperture size. Signal detectability is a measure of
the radar performance in terms of transmission parameters.
3.1 Signal Detectability
One of the important parameters which decides the received power can be
indirectly defined in terms of detectability factor (Farley, 1985). This important
Psig
Pn
Psig
Ts Brec
A e Pt
/2
N c N1inc
h2
Ts Brec
(PRF c )( t
A e h 2Ts1Pave (h )( t
c
Bsig
)1 / 2
)1 / 2
(1)
quantity is the received signal power Psig to the uncertainty Pn in the estimate of the
noise power after averaging. For optimum processing
Where Ae is the effective antenna area, Pt is the peak power transmitted, is the
pulse length, PRF is the pulse repetition frequency, Pave = PtPRF is the average
transmitter power, Brec is the receiver band-width, Ts is the effective system noise
temperature, Nc is the number of samples coherently added, Ninc is the number of
resulting sums which are incoherently averaged, c 1/Bsig is the correlation time of
the scattering medium for the radar wavelength used, t is the total integration time,
4
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
h is the range or height and h is the height resolution. Before the operation of the
coherent integration and incoherent integration, which comes in the digital domain,
the signal is maximized at the receiver with a “matched” filter whose impulse
response is the time inverse of the transmitted pulse. It is also assumed that the
target fills the scattering volume defined by the beam pulse and shape length.
From equation (1.1) it is obvious that the average power is the important
parameter for the strong returns and this is function of pulse length. Short pulses are
required for good range resolution, and the shorter length of Inter pulse period (IPP)
generates the problem of range ambiguity. Therefore maximum limit on the PRF is
restricted due to the above problems. Pulse compression and frequency stepping are
techniques which allow more of the transmitter average power capacity to be used
without sacrificing range resolution.
3.2 Pulse Compression
As the name implies, a pulse of power P and duration is in a certain sense
converted into one of power nP and duration /n. In the frequency domain
compression involves manipulating the phases of the different frequency
components of the pulse. In the time domain a pulse can be compressed via phase
coding, especially binary phase coding, a technique which is particularly amenable
to digital processing techniques. Since frequency is just the time derivative of phase,
either can be manipulated to produce compression. Phase coding has been used
extensively in atmospheric radars and in commercial & military applications.
The codes in general use fall in to a number of general classes
Barker codes: These were first discussed by Barker (1953) and have been used in
Ionospheric incoherent scatter measurements. The distinguishing feature of these
codes is that, the range side-lobes have a uniform amplitude of unity. The
compression process only works, if the correlation time of the scattering medium is
5
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
substantially longer than the full-uncompressed length of the transmitted pulse. The
decoding involves adding and subtracting voltages, not powers. If the scattering
centers move a significant fraction of a radar wavelength between time of arrival of
the first and last baud of the pulse, the compression process will fail. This is never a
problem in practice in Mesosphere, Stratosphere, Troposphere (MST) observations,
but it can be a problem in ionospheric studies. Although 13 bauds is the longest
possible binary Barker sequence (Unity side lobe), there are many longer sequences
with side lobes that are only slightly larger which are used in radar observations
(Woodman et al., 1980).
Complementary code pairs: Barker codes have range side lobes which are small,
but which may still cause problems in MST applications. Ideally a codes which
supports high compression ratios (long codes) to get the possible altitude resolution,
but if we do so the signal from an altitude in the upper stratosphere, may be
contaminated by range side lobe return from lower altitudes, since the scattered
signal strength is a strong function of altitude, typically decreasing by 2-3 dB/km
(Farley, 1985). This side lobe problem can be eliminated by the use of
complementary codes.
The existence of complementary codes was first pointed out by Golay (1961)
and has been discussed further in the literature (Rabiner and Gold; 1975,), but the
severe restriction on their application to radar - phase changes introduced by the
target must vary only a time scale much longer than the IPP - have prevented them
being utilized in practice. The Doppler shifts encountered in military, civilian
application, and in incoherent scatter from the ionosphere are too large. The
Doppler shifts associated with MST radar observation on the other hand, are very
small and are entirely compatible with the use of such codes. The medium
correlation time is typically tens or hundreds of times longer than IPP.
6
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Complementary phase codes are binary in their simplest form and they
usually come in pairs. They are coded exactly as Barker codes, by a matched filter
whose impulse response is the time reverse of the pulse. The range side lobes of the
resulting ACF output for each pulse will generally be larger for a barker code of
comparable length, but the two pulses are complementary pair have the property
that their side lobes are equal in magnitude but opposite in sign, so that when
outputs are added the side lobes exactly cancel, leaving only the central peak. This
code is used in SOUSY radar (Schmidt et.al., 1979), Arecibo (Woodman, 1980) and
Gadanki, India (Rao et.al., 1995).
4. Signal Processing
The decoding of the pulse compressed data and coherent integration need
to be realized in real time. The decoding operation essentially involves cross
correlating the incoming digital data with the replica of the transmit code. It is
implemented by means of a correlator/transversal filter. Since decoding would
normally require several tens of operations per sec, the implementation would
be difficult in software. One approach that can be adopted is to apply coherent
integration first and then decode the signal, which is implemented in Sousy radar
(Woodman, 1983; Woodman et.al., 1984).
Until recently, most of the signal processor designs were based LSI ICs
resulting in limited flexibility. The field of digital signal processing (DSP) has been
a very active area of research and application for more than two decades. This broad
development has paralleled in time the development of high-speed electronic digital
computers, microelectronics and integrated fabrication technologies. An ever
increasing assortment of integrated circuit parts specifically tailored to perform
common DSP functions is available to the design engineers as system building
blocks on parts-in-trade. Effective utilization of advanced DSP IC and fast digital to
7
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
analog converter has made possible the implementation of decoding without
integrating and the software coding in a later stage. In the new generation radars
most of the signal processing is realized in firmware with the help of DSP ICs.
4.1 Data processing and parameter extraction
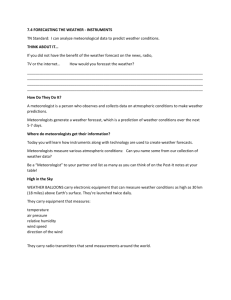
Figure 1shows the functional block diagram of various processing stages involved
in the extraction and estimation of atmospheric parameters.
Signal Processor
I-Channel
Decoder
(I&Q)
On-line/Off-line Processing
Coherent
Integrator
Normalization
Windowing
Q-Channel
Time Series
Noise level
Estimation
Spectrum
Cleaning
Incoherent
Averaging
Fourier Analysis
&
Power Spectrum
Power Spectrum
Moments
UVW
Zonal, Meriodonal, Vertical
wind velocity
Total Power, Mean Doppler, Doppler Width
Off-line Processing
Figure 1 Processing steps for extraction of parameters
The complex time series of the decoded and integrated signal samples are
subjected to the process of FFT for the on-line computation of the Doppler power
spectra for each range bin of the selected range window. The Doppler spectra are
recorded on a Hard disk for off-line processing. There is a provision, however, to
8
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
record raw data (complex time samples) directly for any application, if so desired.
The off-line data processing for parameterization of the Doppler spectrum follows
closely the procedure adopted at the poker flat radar (Riddle, 1983). The
computation involved in the various stages of operation and its advantages is
given below.
Coherent Integration
The detected quadrature signals are coherently integrated for many pulse returns
which lead to an appreciable reduction in the volume of the data to be processed
and an improvement in the SNR. The coherent integration is made possible
because of the over sampling of the Doppler signal resulting from the high PRF
relative to the Doppler frequency. In other words, the coherence time of the
scattering process c is much greater than the sampling interval given by the inter
pulse period tp. In the case of phase coding, a complementary pair of phase-coded
pulse constitutes one radar cycle with a time interval of Tp (= 2tp). The odd and
even pulses are coherently integrated and decoded separately before combining
them to provide the complex time series for spectral analysis for each range gate.
Since the integration is linear operation it can be performed before any decoding
is carried out of the phase coded pulse returns (Woodman et.al., 1980).
The operation of coherent integration amounts to applying a low pass filter,
whose time-domain representation is a rectangular window of Ti duration. The
effects of coherent integration on the signal power spectrum have been discussed
by Farley (1985). The signal spectrum is weighted by that of the integration filter
sin2x/x2, where x = fTi and f is the Doppler shift in Hz. The sampling operation
at the integration time interval of Ti leads to frequency aliasing with signal power
at frequencies f (m/Ti), where m is any integer, added to that at f. In the case of
a flat spectrum, the filtering and aliasing balance each other and white noise still
9
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
looks white, with no tapering at window edges. On the other hand, a signal peak
with Doppler shift of 0.44/Ti Hz, near the edge of the aliasing window, will be
attenuated by 3 dB by the filter function, whereas a peak near the center of the
spectrum will be almost unaffected. One should, therefore, be conservative in
choosing Ni for coherent integration so as to ensure that all signals of interest are
in the central portion of the post-integration spectrum. The coherently integrated
complementary pairs of coded signals are decoded for each range gate and added
together to generate the final time series of the signal return for spectral analysis.
Normalization of the Pre-Processed data
The input data is to be normalized by applying a scaling factor
corresponding to the operation done on it. This will reduce the chance of data
overflowing due to any other succeeding operation. The Normalization has
following components.
a. sampling resolution of ADC
b. scaling due to pulse compression in decoder
c. scaling due to coherent integration
d. scaling due to number of FFT points.
if
v - ADC bit resolution ( 10/16384),
w - Pulse width in microsecond,
M -Number of IPP integrated = Integrated time /inter pulse period,
N - Number of FFT points,
then the Normalization factor
s
v
w MN
(2)
10
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
The complex time series { Ii , Qi where i = 0, . . ,N-1} at the output of the signal
processor is scaled as
~
Ii s Ii
~
Qi s Qi
(3)
Windowing
It is well known that the application of FFT to a finite length data gives rise
to leakage and picket fence effects. Weighting the data with suitable windows can
reduce these effects. However the use of the data windows other than the
rectangular window affects the bias, variance and frequency resolution of the
spectral estimates. In general variance of the estimate increases with the uses of a
window. An estimate is said to be consistent if the bias and the variance both tend
to zero as the number of observations is increased. Thus, the problem associated
with the spectral estimation of a finite length data by the FFT techniques is the
problem of establishing efficient data windows or data smoothing schemes.
Fourier analysis
Spectral analysis is connected with characterizing the frequency content of a
signal. A large number of spectral analysis techniques are available in the
literature. This can be broadly classified in to non-parametric or Fourier analysis
based method and parametric or modal based methods.
Fourier proposed that any finite duration signal, even a signal with
discontinuities, can be expressed as an infinite summation of harmonically related
sinusoidal component; that is
x ( t ) (A k cos( k0 t ) Bk sin( k0 t )
(4)
k 0
11
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Where AK and Bk are Fourier coefficients and 0 is the fundamental angular
frequency. Application of Fourier analysis to discrete series of data and its fast
computation algorithm Fast Fourier transform (FFT) made this technique so popular
in the spectral analysis. FFT is applied to complex time series {(Ii, Qi), i = 0,1, . . .
,N-1} to obtain complex frequency domain spectrum { (Xi, Yi), i = 0, . . . . , N-1}
Xi Yi
1
N
N 1
(Ik jQk ) exp( 2ik / N) i 0, N 1
(5)
k 0
Power Spectrum
Power spectrum is calculated from the complex spectrum as
2
2
Pi Xi Yi ,
i 0,N 1
(6)
Incoherent Integration (Spectral averaging)
Incoherent integration is the averaging of the power spectrum number of times.
where m is the number of spectra integrated.
Pi
1 m
Pik
m k 1
i 0, N 1
(7 )
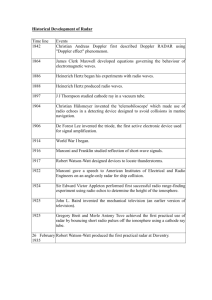
The advantage of the incoherent integration is that it improves the detectability of
the Doppler spectrum. The detectability is defined as
D = PS/S+N
(8)
Where PS is the signal power and S+N is the standard deviation of the power spectral
density. Figure 2 shows the sample result of incoherent averaging of the data
obtained with MST radar.
12
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Figure 2 Example of Incoherent Integration
13
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Power spectrum cleaning
Due to various reasons the radar echoes may get corrupted by ground clutter,
system bias, interference, image formation etc.. The data is to be cleaned from these
problems before going for analysis.
Clutter/ DC removal: The presence of ground clutter presents a source of
additional problem. Different techniques have been used to cancel or minimize its
effect. Ground clutter signals have a spectral signature which consists essentially
of a single spectral line at the origin with a strength which depends on the ground
shielding of the radar. At tropospheric and stratospheric heights it is at least
comparable to the signal and often many orders of magnitude larger. Strictly it is
very difficult to remove these signals, one way to eliminate its biasing effect is to
ignore the frequencies around zero (dc) frequency. This is possible only when the
spectral offset is larger than its width.
The basic operation carried out here is,
~
PN / 2
(PN 1 PN 1)
2
2
2
N/2 correspond s to zero frequency.
(9)
This is also can be removed in time series by taking out the bias in I and Q channel
and then perform the Fourier analysis.
Spikes (glitches) in the time series will generate a constant amplitude band all
over the frequency bandwidth. Once Fourier analysis is done, it is difficult to
identify the correct Doppler in the range bin. These points may be removed from the
range bin and adjusted to noise floor or doing an incoherent integration of the
spectrum and replace the value with good value from the second spectrum.
However, this type of problem need to be corrected before doing Fourier analysis to
get a better result by finding out the out-liers in data.
14
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Constant frequency bands will form in the power spectrum by the
interference generated in the system or due to extraneous signal. Due to this reason
it is also possible the formation of multiple bands in spectrum. This is removed by
taking a range bin, which does not have echoes but the interference. This range bin
gets subtracted from all other range bins after the removal of mean noise. If the
interference is not affecting the original Doppler trace then the analysis may be
carried out in a window confined to the Doppler trace.
5 Parameter Estimation.
MST radar echoes are produced by fluctuations in the index of refraction of
the atmosphere. In most cases, these are turbulence-induced fluctuations. Because
of the random nature of the turbulence, radar returns from turbulence-induced
fluctuations represent stochastic processes and have to be characterized
statistically. The returns from any one height form a random time series and can
be considered stationary within an integration time and Gaussian in nature
(Woodman 1985; Zrnic 1979). A Gaussian and stationary process is fully
characterized by its autocorrelation function or equivalently by its Fourier
transform, the frequency power spectrum. To characterize the process, it is
essential to know the turbulence intensity, mean radial velocity and velocity
dispersion, which are a measure of physical properties of the medium. If the
spectrum is Gaussian, these three parameters contain all the information which
we can obtain from the radar echoes. Following section will give the parameter
extraction procedure.
5.1 Noise level estimation
There are many methods adapted to find out the noise level estimation.
Basically all methods are statistical approximation to the near values. The method
implemented here is based on the variance decided by a threshold criterion,
Variance ( S )
mean( S ) 2
1
over number of spectra averaaged
15
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Hildebrand and Sekhon (1974). This method makes use of the observed Doppler
spectrum and of the physical properties of white noise; it does not involve
knowledge of the noise level of the radar instrument system. This method is now
widely used in atmospheric radar noise threshold estimation and removal.
The noise level threshold shall be estimated to the maximum level L, such that the
set of Spectral points below the level S, nearly satisfies the criterion,
Step 1:
Reorder the spectrum { Pi, i = 0, . . . N-1} in ascending order to form. Let this
sequence be written as{ Ai, i = 0, . . . N-1} and Ai < Aj for i < j
Step 2: compute
n
Ai
Pn
i 0 ( n i)
(10)
2
n
Pn 2
Qn Ai
n
1
i0
and
if
Q n 0, R n
(11)
2
Pn
,
M
)
(Q
for n 1,, N
n
Where M is the number of spectra that were averaged for obtaining the data.
Step 3:
Noise level (L) Pk where k min
n
such that
Rn 1
1. if no n meets the above criterion
5.2 Moments Estimation
The extraction of zeroth, first and second moments is the key reason for on
doing all the signal processing and there by finding out the various atmospheric and
16
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
turbulence parameters in the region of radar sounding. The basic steps involved in
the estimation of moments, Woodman (1985) are given below.
Step 1.
Reorder the spectrum to its correct index of frequency (ie. -fmaximum to
+fmaximum) in the following manner.
Step 1
Spectral index
0
ambiguous freq.
1
N/2
N-1
-fmaximum
Zero freq.
+fmaximum
Step 2:
Subtract noise level L from spectrum
Step 3:
i) Find the index l of the peak value in the spectrum,
~ ~
P1 Pi for all i 0, N 1
ie
ii) Find m, the lower Doppler point of index from the peak point.
ie
~
pi 0 for all m i l
iii) Find n the upper Doppler point of index from the peak point
ie
~
pi 0 for all l i n
Step 4:
The moments are computed as
n ~
i) M0 Pi
(13)
i m
17
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
represents zeroth moment or Total Power in the Doppler spectrum.
ii ) M1
1 n ~
Pifi
M0 i m
where fi
(i N 2 )
(IPP n N)
(14)
represents the first moment or mean Doppler in Hz
iii ) M2
1 n ~
2
Pi (f i M1)
M0 i m
(15)
represents the second moment or variance, a measure of dispersion from central
frequency.
M0
v) Signal to Noise Ratio (SNR) 10 log
dB
( N L)
iv )
Doppler width (full ) 2 M 2
Hz
(16)
(17)
where
IPP - is interpulse period in microsec.
N - is the number of FFT points.
Calculation of spectral moments of spectrum with composite structure is
done in a slightly different way from the procedure explained above. This type of
spectrum normally comes in the upper atmospheric region (Ionosphere). Here the
spectra shows multiple spikes and wide, so after the removal of mean noise level the
spectra may be crossing from positive values to negative many times. Thus, the
peak and valley detection described above can not give the correct result. To
overcome this problem, a running template is taken with seven Doppler points
(Patra et.al., 1995). The Doppler point to be checked is the central point of the
18
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
template. This template will move from the peak to the either side of the spectrum
to find the lower and upper point of Doppler index from the maximum peak. The
running average of seven points is checked against a threshold. The threshold is
kept 3dB above the mean noise level. The Doppler point is considered till the
template average is above the threshold. Remaining part of the moments calculation
is same as that of the calculation for the single peak Doppler spectrum.
5.3 UVW Computation
The prime objective of atmospheric radar is to obtain the vector wind
velocity. Velocity measured by a radar with the Doppler technique is a line of
sight velocity, which is the projection of velocity vector in the radial direction.
There are two different techniques of determining the three components of the
velocity vector: the Doppler Beam Swinging (DBS) method and Spaced Antenna
(SA) method. The DBS method uses a minimum of three radar beam orientations
(Vertical, East-West, and North-South) to derive the three components of the
wind vector (Vertical, Zonal and Meriodional), Sato (1988). In the spaced
antenna method, the backscattered signal is received by three non-coplanar
antennas, located usually at the corners of a right angle triangle. The horizontal
velocity and the characteristics of the ground diffraction pattern and thereby that
of the scattering irregularities can be obtained through the full correlation analysis
of Briggs (1984).
19
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Calculation of radial velocity and height:
For representing the observation results in physical parameters, the Doppler
frequency and range bin have to be expressed in terms of corresponding radial
velocity and vertical height.
(c tR cos )
meters
2
(c fD)
fD
Velocity , V
or
(2 fC)
2
Height , H
(18)
m / sec
(19)
where c - velocity of light in free space, fD- Doppler frequency, fC- Carrier
frequency, - Carrier wavelength ( here 5.86 m), - Beam tilt angle, tR - Range
time delay.
Computation of absolute Wind velocity vectors (UVW):
After computing the radial velocity for different beam positions, the absolute
velocity (UVW) can be calculated. To compute the UVW, at least three noncoplanar beam radial velocity data is required. If higher number of different beam
data are available, then the computation will give an optimum result in the least
square method.
Line of sight component of the wind vector V (Vx, VY, Vz) is
VD = V . i = Vx cosx + Vy cosy + Vz cosz
(20)
where X, Y, and Z directions are aligned to East-West, North-South and Zenith
respectively. Applying least square method, residual
2 = (Vx cosx + Vy cosy + Vz cosz - VD i)2
where VD i =
(21)
fD i * /2 and i represents the beam number
20
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
To satisfy the minimum residual
2 /Vk = 0
k corresponding to X,Y, and Z leads to
cos 2 Xi
Vx
i
Vy cos Xi cos Yi
Vz i
cos Xi cos zi
i
cos Xi cos Yi
i
cos
i
2 Yi
cos Yi cos Zi
i
cos Xi cos Zi
i
cos Yi cos Zi
i
2 Zi
cos
i
1
VDi cos Xi
VDi cos Yi (22)
VDi cos Zi
Thus, on solving equation (2.20) we can derive VX, VY, and VZ, which corresponds
to U (Zonal), V (Meridonal) and W (Vertical) components of velocity.
21
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Reference:
Barker, R.H., Group synchronizing of binary digital systems, in Communication
theory, ed. By W. Jackson, PP 273-287, Acadamic, Orlando, Fla., 1953.
Breit, G and M.A Tuve, A radio method of estimating the height of conducting
layer, Nature 116, 357, 1925.
Briggs, B., The analysis of spaced sensor records by correlation techniques,
Handbook for MAP, Vol. 13, pp 166-186, SCOSTEP Secretariat, University of
Illinois, Urbana, 1984.
Doviak, R.J., and Zrnic.D.S, Doppler radar and Weather Observations, Acadamic
Press, London 1984.
Farley, D.T., On-line data processing techniques for MST radars, Vol 20, No.6, Pp
1177-1184, 1985.
Golay, M.J.E., Complimentary series, IEEE Trans. Inf. Theory, IT-7, 82-87, 1961.
Hildebrand, P.H., and R.S Sekhon, Objective determination of the noise level in
Doppler spectra, J.Appl.Meterol., 13, 808-811, 1974.
Patra, A.K., V.K.Anandan, P.B.Rao, and A.R.Jain First observations of equatorial
spread –F from Indian MST radar, Radio Sci., 30, 1159-1165, 1995.
Rabiner, L.R., and B.Gold, Theory and application of Digital signal Processing,
Prentice Hall, Englewood Cliffs, N.J, 1975.
Rao, P.B., A.R Jain, P.Kishore, P.Balamuralidhar, S.H.Damle and G.Viswanathan.,
Indian MST radar1. System description and sample vector wind measurements in
ST mode., Radio sci., vol 30, No.4 pp 1125-1138 1995.
Riddle, A.C., Parameterization of spectrum, in Handbook for MAP, edited by S.A.
Bowhill and B.Edwards, 9. pp 546-547, SCSTEP Secr., Urbana, Ill., 1983.
Rötteger, .J., and M.F. Larsen, UHF/VHF Radar techniques for atmospheric
research and wind profiler applications, in Radar in Meteorology, edited by D.
22
IITM-NMRF-VKA-Training /Workshop programme on Wind profiler and Radio Acoustic Sounding System
Atlas, chap. 21a, pp 235-281, American Meteorological Society, Boston, Mass.,
1990.
Sato, T., Radar Principles, ISAR, Lecture notes ed by Fukao, 1988.
Schmidt, R., Multiple Emitter Location and Signal Parameter Estimation, Proc. Of
the RADC spectrum Estimation Workshop, RADC-TR-79-63, Rome Air
Development Center, Rome, NY, , PP243, Oct 1979.
Woodman, R.F., Kugel R.P, and Rotteger, A coherent integrator-decoder
preprocessor for the SOUSY-VHF radar, Radio Sci., 15, 233-242, 1980.
Woodman R.F, M.P.Sulzer, D.T.Farley., Binary pulse compression techniques for
MST radars, Map Hand book. Vol. XIII, pp 155-165, 1984.
Woodman, R.F., and A Guillen, Radar observations of winds and turbulence in the
stratosphere and mesosphere, J. Atmos. Sci., 31, 493-505, 1985.
23