Atmosphere and Wind Model
advertisement

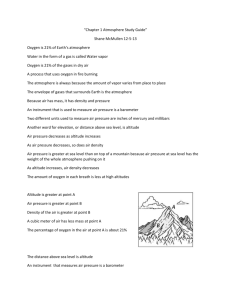
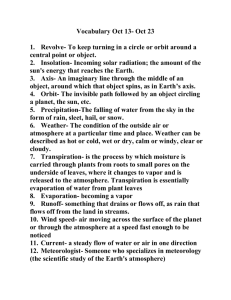
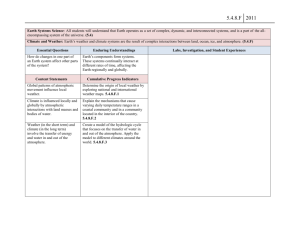
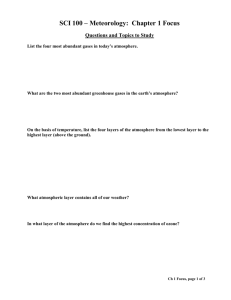
Wind and Atmosphere pg. # A.6.2.1.4 Atmosphere and Wind Model In order to accurately predict the trajectory of a launch the simulations need a atmospheric and wind profile model. This model predicts the conditions a launch vehicle experiences when traveling through Earth’s atmosphere. Also, the model is used when predicting the balloon ascension. These conditions determine the various aerodynamic forces imparted on a moving vehicle. A model of the wind is needed as well. The simulations need a wind model that realistically simulates the random wind magnitudes and directions experienced during a flight. A.6.2.1.4.1 Standard Atmosphere Profiles The atmosphere model used to run the simulations is based on the standard atmosphere data based of the 1976 NASA Standard Atmosphere. The simulations use a MATLAB function called atmosphere4.m. Input into the function is geopotential height. The function outputs the temperature, density, and pressure at the selected height. The model makes these calculations up to a height of 89.9 km. Figures A.6.2.1.4.1.1 through A.6.2.1.4.1.3 show plots of the pressure, temperature and density outputs from this function. Figure A.6.2.1.4.1.1: Standard atmosphere temperature profile. (Allen Guzik) Author: Allen Guzik Wind and Atmosphere pg. # Figure A.6.2.1.4.1.2: Standard atmosphere pressure profile. (Allen Guzik) Figure A.6.2.1.4.1.3: Standard atmosphere density profile. (Allen Guzik) A.6.2.1.4.2 Wind Gusting Algorithm Another aspect of the wind and atmospheric model is the unpredictable nature of wind gusts. Within the wind model architecture there is a wing gusting generator. The concept behind the wind gusting generator is to be able to generate random wind gusts then add them to the constant wind profile. Author: Allen Guzik Wind and Atmosphere pg. # There are many parameters designed into the gusting algorithm to allow for random gusting. First, unique to each launch, we choose the number of gusts a vehicle can experience. This number is random and can vary from 0 to 20 gusts per launch. Another unique property to each launch is the altitude in the atmosphere where each gust occurs. Each gust is assigned a random altitude where the gust happens. The possible altitude range is from 0 km to 30 km. The direction of each gust is also random for each gust. This allows for the unpredictable nature of the wind changing direction. The direction is selected to always be parallel to the ground. This means the model does not generate any up or down drafts. Each gust direction is in any direction that is plus or minus 90˚ from the direction of the constant wind profile. The last component of the wind gust algorithm is the magnitude of each gust. Each gust has a random magnitude that can be anywhere between 0 m/s to 12 m/s. This magnitude is added to the constant wind profile. For example; if a gust of 9 m/s is assigned to the altitude of 10 km and is going in exactly the same direction of the constant wind the resulting wind is: At that altitude, the constant wind is 40 m/s. The resulting total wind velocity is 49 m/s. Lastly, concerning the magnitude of the wind gust, is the duration of each gust. The gust is modeled such that the gust is an impulse. This decision is based off of assuming the length of altitude each gust is small enough that when considering the velocity of the rocket traveling through that altitude range, the gust acts as an impulse. An example of a possible wind profile generated from AAE450_wind_model.m with gusts for a ground rocket launch is provided in Figures A.6.2.1.4.2.1 and A.6.2.1.4.2.2. Author: Allen Guzik Wind and Atmosphere pg. # Figure A.6.2.1.4.2.1: Example of a wind profile with gusting in the north/south direction. (Kyle Donahue and Allen Guzik) Figure A.6.2.1.4.2.2: Example of a wind profile with gusting in the East/West direction. (Kyle Donahue and Allen Guzik) Author: Allen Guzik