Abstract-Papers up to 4 pages should be submitted using this format
advertisement

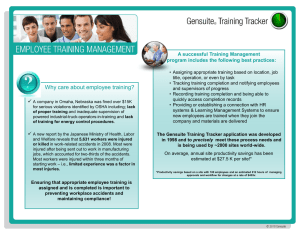
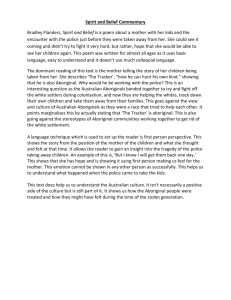
FACE RECOGNITION - SURVEY G.Ramkumar1, M.Manikandan2 Assistant Professor, ECE Department, Maamallan Institute of Technology, India Associate Professor, ECE Department, MIT (Anna University), India ramkumar_mppl@yahoo.co.in, maniiz@yahoo.com Abstract - Face recognition is one of the most successful applications of image analysis and pattern recognition. Major advancements is took place in face recognition for the past ten to fifteen years. In this paper, an overview of some of the wellknown methods in each of these categories is provided and some of the benefits and drawbacks of the schemes mentioned therein are examined. Also this paper reviews the most recent algorithms developed for this purpose and attempts to give an idea of the state of the art of face recognition technology. Keywords - Face recognition, Biometrics 1. Appearance based methods 2. Feature based matching methods 3. Hybrid methods APPEARANCE BASED APPROACHES This method takes the entire facial region as the raw input for processing the recognition system. The initial phase of this face recognition problem is to transform it into a face space analysis problem and then a number of well-known statistical methods are applied to it. I. INTRODUCTION A. The Eigen face Method Biometric-based techniques have emerged as the most promising option for recognizing individuals in recent years, instead of authorizing people and permit them access to physical and virtual domains based on passwords, smart cards, plastic cards, tokens, keys and so forth, these methods examine an individual’s physiological and/or behavioral characteristics in order to determine and/or ascertain his identity. Passwords and PINs are not easy to remember and can be stolen or guessed; cards, tokens, keys and the like can be incorrect, forgotten or duplicated; magnetic cards can become corrupted and inaccessible. However, an individual’s biological traits cannot be misplaced, forgotten, stolen or forged. Biometric-based technologies include identification based on physiological characteristics like face, fingerprints, finger and hand geometry, hand veins, palm, iris, retina, ear and voice and behavioral traits like gait, signature and keystroke dynamics [1]. Face recognition appears to offer several advantages over other biometric methods. Face recognition is used for two reasons: Kirby and Sirvoich first proposed Eigenfaces method for recognition. Encouraged by their work, Turk and Pentland improved this work by implementing Eigenfaces method based on Principal Component Analysis (PCA) for the same goal [16]. PCA is a Karhumen-Loeve transformation. PCA is a recognized linear dimensionality reduction method which determines a set of mutually orthogonal basis functions and uses the leading eigenvectors of the sample covariance matrix to characterize the lower dimensional space as shown in fig 1. 1. Verification: When presented with a face image of an unknown individual along with a claim of identity, determine whether the individual is who he or she claims to be. 2. Identification: Given an image of an unknown individual, determining the person’s identity by comparing that image with a database of images of known individuals. Face recognition is also used in conjunction with other biometrics such as speech, iris, fingerprint, ear and gait recognition in order to enhance the recognition performance of these methods [2-15]. II. FACE RECOGNITION TECHNIQUES There are three important methods for face recognition: Fig.1. Feature vectors are derived using Eigen faces [17] Then Moghaddam et al [18] suggested Bayesian PCA method. In this system, the Eigenface Method based on simple subspace-restricted norms are extended to use a probabilistic measure of similarity. Chung et al. [19] in his paper suggested another combined approach for recognition using PCA and Gabor Filters. Their method consists of two phases. Initially to extract facial features he uses Gabor Filter and then use PCA to classify the facial features optimally. Some of the recent PCA-based algorithms discussed as follow: Kernel PCA approaches [20] delivers generalizations which take higher order correlations into consideration. This method handles the non-linearity in face recognition and achieve lower error rates. Symmetrical PCA [21] in which PCA is combined with evenodd decomposition principle. This approach uses the different energy ratios and sensitivities of even/odd symmetrical principal components for feature selection. Two-dimensional PCA [22] involves framing of a 2-dimensional matrix instead of 1 D vector. Adaptively weighted sub pattern PCA [23] involves the division of the original whole image pattern into sub patterns and then the features are obtained from them. The sorting is done by adaptively computing the contributions of each part. Weighted modular PCA [24] methods involve partitioning the whole face into different modules or subregions like mouth, nose, eyes and forehead and then the weighted sum of errors of all these regions is found to get the final decision. C. Support Vector Machines To develop the classification performance of the PCA and LDA subspace features, support vector machines (SVM) are introduced [35]. SVM generally trained through supervised learning. SVM uses a training set of images to calculate the Optimal Separating Hyperplane (OSH), reducing the risk of misclassification among two classes of image in some feature space. Guo et al [36] applied this method for face recognition. He used a binary tree classification system in which a face image is iteratively classified as belonging to one of two classes. A binary tree structure is circulated up until the two classes denote individual subjects and a final classification decision can be made. SVM has been engaged for face recognition by some other researchers and has been shown to return good results. B. The Fisherface Method The Fisherface Method is introduced by Belhumeur, 1997 [25], a derivative of Fisher’s Linear Discriminant (FLD) which contains linear discriminant analysis (LDA) to obtain the most discriminant features. Similar to eigenface method Fisherface method also use both PCA and LDA to produce a subspace projection matrix. LDA determines a set of projection vectors which form the maximum between-class scatter and minimum within-class scatter matrix simultaneously (Chen et al [26]) and provides lower error rates than Eigen face method. Fig 2 shows the example of six different classes using LDA with large variances within classes, but little variance within classes. Kernel FLD [27] is able to extract the most discriminant features in the feature space, which is same as to extract the nonlinear features in the original input space and provides better results than the conventional fisherface which is based on second order statistics of an image-set and does not take into account the higher order statistical dependencies. Some of the current LDA-based algorithms include [28]: Direct LDA [29] constructing the image scatter matrix from a normal 2-d image and has the ability to resolve small sample size problem. Further, Dual-space LDA [30] requires the full discriminative information of face space and tries to resolve the same problem. Direct-weighted LDA [31] combines the privileges of both direct LDA and weighted pair wise Fisher criteria. Block LDA [32] break down the whole image into blocks and characterizes each block as a row vector. These row vectors for each block form 2D matrices then LDA is applied to these matrices. A methodology to fuse the LDA and PCA [33] representations using two approaches: the K-Nearest Neighbour approach (KNN) and the Nearest Mean approach (NM) was done on the AT&T and the Yale datasets. Fig.2.Example of Six Classes Using LDA [17] D. Independent Component Analysis ICA is a modified form of PCA and is considered to have more representative power than PCA. In ICA a linear transformation is determined to represent a set of random variables as linear combinations of statistically independent source variables. ICA is used to find the high order statistics present in the image. ICA encodes face images with statistically independent variables. These variables are not essentially associated with the orthogonal axes and looks for direction that are more independent from each other. ICA decorrelates the high-order moments of the input in addition to the second-order moments and its possible use for face recognition has been shown by Bartlett and Sejnowski [34]. E. Probabilistic Decision Based Neural Network (PDBNN) Probabilistic Decision Based Neural Network (PDBNN) is proposed by Lin et al [37] comprises of three different modules (First one is a face detector, second one is an eyes localizer and the third one is a face recognizer).In this technique only the facial regions of upper are considered. FEATURE BASED APPROACHES In these methods initial phase is to extract the geometry or the appearance of the face local features such as the nose, eyes and mouth. This fact is then fed into a structural classifier. A. Face Recognition through geometric features C. Active Appearance Model (AAM)-2D Morphable Method In the initial phase a set of fiducial points are examined in every face and the geometric facts like distances between these points are explored and the image nearest to the query face is nominated. The work in this way was done by Kanade [41] who used the Euclidean distance for correlation between 16 extracted feature vectors constructed on a database of 20 dissimilar people with 2 images per person and achieve a performance rate of 75%. Further, Brunelli and Poggio [38] performs the same on 35 geometric features from a database of 47 different people with 4 images per person as shown in the fig 4 and achieved a performance rate of 95%. Most recently, Cox et al. [39] derived 35 facial features from a database of 685 images and reported a recognition performance of 95% on a database of 685 images with a single image for each individual. Faces are highly variable and deformable objects. Depending on pose, lighting, expression, faces can have different looks in the images. Cootes, Taylor, and Edwards [42] proposed Active Appearance Model which is capable of „explaining‟ the appearance of a face in terms of a compact set of model parameters. AAM is an integrated statistical model. This technique involves combining a model of shape variation with a model of the appearance variations in a shape normalized frame. AAM is implemented on the basis of a training set having labelled images. The landmark points are marked on each example face at key positions to highlight the main features as shown in fig 6. Model parameters are found to perform matching with the image which minimizes the difference between the image and a synthesized model example projected into the image. Fig.6. Tanning image is split into shape and shape normalized texture [42] Fig.4.Geometrical feature used by Brunelli and Poggio [38] B. Hidden Markov Model (HMM) The HMM was first presented by Samaira and Young [40]. HMM generally used for images with variations due to lighting, facial expression, and orientation and thus has an advantage over the holistic approaches. For treating images using HMM, space sequences are considered. HMM can be explained as a set of finite states with related probability distributions. This method is named as a Hidden Markov Model because the states are not visible, only the result is visible to the external user. This method use pixel strips to cover the forehead, eye, mouth, nose and chin without finding the exact locations of facial features. The face arrangement is observed as a sequence of discrete parts. The order of this system should be maintained for e.g., it should run from top to bottom from forehead, eyes, nose, mouth, and chin as in fig 5. Each of these facial regions is assigned to a state from left to right 1D continuous HMM. Fig.5: Left to Right HMM for face recognition D. 3D Morphable Model To handle the facial variations like pose, illumination etc. it is better to represent the face using the 3 D models. 3D morphable model is a strong, effective and versatile representation of human faces. To make a model, high quality frontal and half profile pictures are taken first of each subject under ambient lighting conditions. Then the images are used as input to the analysis by synthesis loop which yields a face model. Blanz et al. [43] proposed this method based on a 3D morphable face model in which he tries to find an algorithm to recover the parameters like shape and texture from the single image of a face and encodes them in terms of model parameters. Finally the 3D morphable model provides the full 3D correspondence information which allows for automatic extraction of facial components and facial regions. HYBRID METHODS These methods use both the holistic and feature-based methods to recognize the face and show better results. Eigen modules proposed by Pentland et al. [44], which uses both global eigenfaces and local Eigen features and shows much better results than the holistic eigenfaces. Penev and Atick [45], gave a method called Hybrid LFA (Local Feature Analysis). Shape-normalized Flexible appearance technique by Lanitis et al. [46] and Component-based Face region and components by Huang et al. [47] which combines component based recognition and 3D morphable models for face recognition. The major step is to generate 3D face models using 3D morphable model from the three input images of each person. These images are furnished under varying pose and illumination conditions to build a large set of synthetic images which are used to train a component-based face recognition system [47]. A Support Vector Machine (SVM) based recognition system is used which decomposes the face into a set of components that are interconnected by a flexible geometrical model so that it can account for the changes in the head pose leading to changes in the position of the facial components. III. LIMITATION OF THE EXISTING SYSTEMS Though existing tracking system have been highly successful, most (if not all) of them do not work well in tracking faces in surveillance applications where significant illumination changes are of the norm. Face images from videos are usually small, and are of low visual quality due to random noise, blurring, occlusion, etc. In addition, variations in illumination cause rapid changes in the appearance of the face and further complicate the tracking problem. One theoretically possible solution is to apply an illumination normalization method to reduce the effect of the illumination variations before tracking. However, this is not an effective solution because the illumination normalization algorithms do not work well in low resolution face images. Moreover, the computational burden of illumination normalization is often nontrivial, which will prevent the tracker from operating in real time. Because real time tracking is normally required in many practical surveillance applications, a new tracker is needed to tackle the low resolution face tracking problem when illumination changes occur. IV PROPOSED METHODOLOGY Under our proposed method, to mitigate the effects of illumination changes, face images are converted to an illuminationin sensitive feature space called the Gradient Logarithm Field(GLF) feature space, and a GLF-tracker is developed to resolve the tracking problem. Four criteria are listed below for features to adequately characterize low resolution faces subject to illumination changes.[48] The GLF feature depends mainly on the intrinsic features of the face (namely the albedo α and the surface normal n) and is weakly dependent on the lighting source l. By utilizing the visual and motion cues present in a video, we show that the GLF feature is suitable for tracking a face in the presence of illumination changes. The particle filter, incorporating a nonlinear motion model and an online learning observation model, is then used to implement the GLF tracker. Four criteria are suggested for extracting illumination insensitive features which will be effective for low resolution visual tracking. 1) Features should be insensitive to illumination variation. Considering the Lambertian model (I = α <n, l >),this criterion implies that the feature should mainly depend on its intrinsic structure - the albedo α and the surface normal s n of a face - rather than the illumination component l. 2) Features should be global rather than block or pointbased. Because the face region in a video is often small,the face image consists of only a small number of pixels, such as 16 × 16. In such a case, block or point-based features are not adequate to characterize the face, and global features are more powerful and flexible. 3) Features should not depend on any face model. Although a face model often provides extra information that may assist the tracker in dealing with illumination variations[49], it is not effective for tracking low resolution faces in videos. This is because most of the model-based algorithms require a high degree of alignment between the face image and the face model, which is challenging for low resolution face images. Moreover, most model based algorithms are computationally expensive, making them not useful for practical real-time face tracking applications. 4) Features should be designed for tracking. Though many approaches have been proposed for extracting illumination insensitive face features, most of them are designed for recognition or detection rather than tracking. Visual and motion cues are valuable in addressing the tracking problem and provide more information that helps solve the illumination problem. Therefore, the feature used for tracking should utilize these extra pieces of information for tracking problems. In accordance with the foregoing criteria, we propose the following GLF feature for tracking. Let I (x, y) be the intensity of a video frame at position (x, y). We assume that the face surface has a Lambertian reflectance with the albedo α(x, y).For simplicity, the position index (x, y) is omitted. In this paper, we consider a generic Fig 7 An overview of GLF Tracker [48] lighting case in which the light on the surface of the face can come from any direction. Denoting the lighting intensity from direction e asl(e) and k(n · e) = max(<n, e >, 0), we have ---------(1) Where denotes integration over the surface of the sphere and k is the Lambertian kernel. Following Basri and Jacob’s seminal study [50], the lighting intensity function l(e) can be written as a sum of harmonics denoted by -----(2) Substituting l(e) with Eq.(2), Eq.(1) can be written as ---------------(3) In the scenario that there is attached shadow, the Lambertian kernel function k(n·e) is equal to zero. So the integral (Eq.(3))on the lighting direction which causes attached shadow can be ignored. Therefore, we only consider the scenario without attached shadows. In the absence of attached shadows, the Lambertian kernel function is a linear function; and the harmonics are twice continuously differentiable. Then Eq.(3)can be straightforwardly written as follows, -------------(4) Where s02 is the region that n·u>0, Denoting feature F is obtained after two steps. First, the face image is converted into the logarithm space as follows: Log (I) = log α + log <n, l >--------------(6) In the logarithm feature space, the contribution of the albedo is independent of the illumination component. In addition when the gradient is applied, the resulting GLF feature is insensitive to illumination changes during tracking. Once gradient operation accomplished, we have ---------(7) Therefore, the GLF is defined as We offer a brief analysis to illustrate the robustness of the GLF feature. Considering the x-axis of F, we have -----------(8) We assume that the lighting source l is similar across a small patch of the face, so the last term in Eq. (8) is negligible. Therefore, by presenting the lighting source l as a combination of lighting intensity λ(=||l||) and lighting direction we can rewrite Eq. (8) as It can be seen that the proposed GLF is not sensitive to changes in lighting intensity. The GLF feature is also insensitive to changes in the lighting direction during tracking. We have I = αk (n.l) = α <n , l> ------------------(5) Note that the albedo α and the surface normal n are considered to be the intrinsic features of the face. A straightforward method of handling illumination variations is to separate the lighting source l from image I [51] and extract the intrinsic features to characterize the face. However, it is an ill-posed open problem that may need additional models for the face, which is not applicable to low-resolution videos (please referto Criterion 3). We show that under some reasonable assumptions, the performance degradations caused by lighting source changes can be alleviated. The GLF GLF TRACKER VERSUS EXISTING TRACKING ALGORITHMS we apply the tracker to a video downloaded fromhttp://www.youtube.com/watch?v=_v3Wtpv M7_0. The video (known as Gunner) of a person running along a passage was captured by a surveillance camera. As shown in Fig 8, the IVT tracker [53] fails to track the face after frame #29 and the L1 tracker [52] cannot locate the face region properly after frame #60 and fails to track the face after frame #71. As the cropped images at the bottom between frames #60 to#71 show, illumination changes cause the L1 tracker to fail. The proposed GLF tracker is effective and obtains robust tracking results.We report the results of additional experiments using the challenging videos downloaded from www.cs.toronto.edu/dross/ivt/in which changes in illumination condition are significant. We use the parameter settings of [53] and compare our results with the results of [53], and the tracking results of the L1 Tracker [52]. Because the video (known as Handsome Fellow) was captured with a handheld camera, the video is subject to random shakes. As can be seen from Fig 9, the L1 tracker [52] is not robust due to significant variations in the face region, while the IVT tracker [53] obtains reasonable tracking results before frame #300 as shown in [53]. However, when pose variations also occur, the IVT tracker [53] fails to track after frame #312. We repeat the experiment on a video called Dudek previously used by Ross et al. [53] to evaluate the performance of the GLF tracker. In Dudek, a person is subject to large pose, expression and lighting changes and experiences partial occlusions. Fig. 9. Tracking results for the video captured outdoors (Handsome Fellow): a person moves underneath a trellis with large illumination variations and cast shadows while changing his pose. Red: results from the IVT tracker [5]. Yellow: L–1 tracker [4]. Blue: proposed method V. TRACKING RESULT Fig 8 Tracking results for the surveillance video from YouTube (Gunner): a person moves in a long passage. Red: results from the IVT tracker. Yellow: L–1 tracker. Blue: proposed method.[48] As shown in Fig 10, the proposed method obtains better tracking results than those provided by the IVT tracker [53] and also outperforms the L–1tracker [52]. The face images tracked by the proposed method appear more precise in terms of the rotation roll angle, as shown in frames #127, #141, and # 155.We also apply the tracker to another publicly available database: the Boston University head tracking database [54].The tracking results reported in Fig 11 show that the proposed algorithm performs better than its counterparts. We record the number of frames successfully tracked by the proposed GLF tracker, and the IVT tracker, a tracker on illumination preprocessing (the IP tracker), a tracker with a gradient face feature (the GF tracker) and a tracker with a Weberface feature (the WF tracker). The tracking results for the 102 people in the video are shown in Table I. The average number of frames tracked is shown in Fig 12. It can be seen that the proposed GLF tracker outperforms the second placed tracker by more than 29%. Therefore, we conclude that the proposed GLF tracker can effectively track low resolution faces in videos. As shown in Fig 8, 9 and 11, the proposed tracker is effective in tracking faces even when the lighting direction changes during tracking. VI. CONCLUSION In this paper, we proposed and evaluated a novel GLF tracker to address the problem of tracking a low resolution face subject to illumination changes. This new feature possesses three desirable properties: first, it is a globally dense feature which is effective in low-resolution videos, in contrast with the point-based features which may not perform well; second, because the GLF feature is easy to implement and does not impose a heavy computational burden, the GLF tracker can run in real-time; third, it does not depend on a specific face model. Experiments shows that when implemented using a particle filter, the GLF tracker is insensitive to illumination variations and outperforms many state-of-the-art tracking algorithms. TABLE I TRACKING RESULTS FOR THE CAVIAR DATABASE: THE NUMBER OF FRAMES TRACKED BY THE TRACKERS Fig. 10. Tracking results for the video captured in an office: a person undergoing large pose, expression, appearance, and lighting changes, as well as partial occlusions. Red: results from the IVT tracker. Yellow: L– 1 tracker. Blue: proposed method[48] Fig. 12. Tracking results for the CAVIAR database: average number of faces tracked by different trackers. IVT, IP, WF, GF [48]. References: Fig. 11. Tracking results for the video from the BU head tracking database (Jal5): a person moving his head in front of the camera with illumination changes. Red: results from the IVT tracker. Yellow: L–1 tracker. Blue: proposed method.[48] [1] A. K. Jain, R. Bolle, and S. Pankanti, Biometrics: Personal Identification in Networked Security," A. K. Jain, R. Bolle, and S. Pankanti, Eds.: Kluwer Academic Publishers, 1999. [2] T. Choudhry, B. Clarkson, T. Jebara, and A. Pentland, "Multimodal person recognition using unconstrained audio and video," in Proceedings, International Conference on Audio and Video-Based Person Authentication, 1999, pp.176-181. [3] M. M. Rahman, R. Hartley, and S. Ishikawa, "A Passive And Multimodal Biometric System for Personal Identification," in International Conference on Visualization, Imaging and Image Processing. Spain, 2005, pp.89-92. [4] R. Brunelli and D. Falavigna, "Person identification using multiple cues," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol.17, pp.955- 966, 1995. [5] M. Viswanathan, H. S. M. Beigi, A. Tritschler, and F. Maali, "Information access using speech, speaker and face recognition," in IEEE International Conference on Multimedia and Expo, Vol.1, 2000, pp 493--496. [6] A. K. Jain, K. Nandakumar, X. Lu, and U. Park, "Integrating Faces, Fingerprints, and Soft Biometric Traits for User Recognition," Proceedings of Biometric Authentication Workshop, in conjunction with ECCV2004, LNCS 3087, pp.259-269, 2004. [7] P. Melin and O. Castillo, "Human Recognition using Face, Fingerprint and Voice," in Hybrid Intelligent Systems for Pattern Recognition Using Soft Computing, Vol.172, Studies in Fuzziness and Soft Computing: Springer Berlin / Heidelberg, 2005, pp.241-256. [8] K. Chang, K. W. Bowyer, S. Sarkar, and B. Victor, "Comparison and Combination of Ear and Face Images in Appearance-Based Biometrics," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol.25, pp.1160-1165, 2003. [9] R. Chellappa, A. Roy-Chowdhury, and S. Zhou, "Human Identification Using Gait and Face," in The Electrical Engineering Handbook, 3rd ed: CRC Press, 2004. [10] S. Ben-Yacoub, J. Luttin, K. Jonsson, J. Matas, and J. Kittler, "Audio-visual person verification," in IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Vol.1. Fort Collins, CO, USA, 1999, pp.580-585. [11] X. Zhou and B. Bhanu, "Feature fusion of side face and gait for video-based human identification," Pattern Recognition, Vol.41, pp.778-795, 2008. [12] D. Bouchaffra and A. Amira, "Structural hidden Markov models for biometrics: Fusion of face and fingerprint," Pattern Recognition, Vol.41, pp.852-867, 2008. [13] H. Vajaria, T. Islam, P. Mohanty, S. Sarkar, R. Sankar, and R. Kasturi, "Evaluation and analysis of a face and voice outdoor multi-biometric system," Pattern Recognition Letters, Vol.28, pp.1572-1580, 2007. [14] Y.-F. Yao, X.-Y.Jing, and H.-S. Wong, "Face and palmprint feature level fusion for single sample biometrics recognition," Neurocomputing, Vol.70, pp. 1582-1586, 2007. [15] J. Zhou, G. Su, C. Jiang, Y. Deng, and C. Li, "A face and fingerprint identity authentication system based on multi-route detection," Neurocomputing, Vol.70, pp.922931, 2007 [16] M. Turk and A. Pentland. “Face recognition using eigenfaces”. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 1991 [17] Face Recognition: National Science and Technology Council (NSTC), Committee on Technology, Committee on Homeland and National Security, Subcommittee on biometrics. [18] B. Moghaddam, “Principal Manifolds and Bayesian Subspaces for Visual Recognition”, IEEE, 1999. [19] K. C. Chung, S. C. Kee, and S. R. Kim, “Face Recognition using Principal Component Analysis of Gabor Filter Responses”, IEEE, 1999. [20] N. Sun, H. Wang, Z. Ji, C. Zou, and L. Zhao, "An efficient algorithm for Kernel two-dimensional principal component analysis," Neural Computing & Applications, vol.17, 2008. [21] Q. Yang and X. Q. Ding, "Symmetrical Principal Component Analysis and Its Application in Face Recognition," Chinese Journal of Computers, vol.26, 2003. [22] J. Yang and D. Zhang, "Two-Dimensional PCA: A New Approach to Appearance-Based Face Representation and Recognition," IEEE Trans. Pattern Analysis and Machine Intelligence, vol.28, pp.131- 137, 2004. [23] K. R. Tan and S. C. Chen, "Adaptively weighted subpattern PCA for face recognition," Neurocomputing, vol.64, pp.505-511, 2005. [24] A. P. Kumar, S. Das, and V. Kamakoti, "Face recognition using weighted modular principle component analysis," in Neural Information Processing, Vol.3316, Lecture Notes In Computer Science: Springer Berlin / Heidelberg, 2004, pp.362-367. [25] Peter N.Belhumeur,JoaoP.Hespanha and David Kreigman, “Eigenfaces vs. Fisherfaces Recognition using class specific Linear Projection”, IEEE Trans. PAMI, 1997. [26] Chen, H.Liao, M.Ko, J.Lin and G.Yu," A New LDABased Face Recognition System which can Solve the Small Sample Size Problem", Pattern Recognition, 2000. [27] S.Mika, G.Ratsch, J Weston, Scholkopf, Smola and K R Muller, “Invariant Feature extraction and classification in kernel spaces”. In NIPS-12, 2000. [28] SeemaAsht, RajeshwarDass, “Pattern Recognition Techniques: A Review”; International journal of Computer Science Telecommunications, vol 3, Issue 8, August 2012. [29] H. Yu and J. Yang, "A Direct LDA Algorithm for High-dimensional Data with Application to Face Recognition," Pattern Recognition, vol.34, pp.2067- 2070, 2001. [30] X. Wang and X. Tang, "Dual-space Linear Discriminant Analysis for Face Recognition," in Proceedings of IEEE International Conference on Computer Vision and Pattern Recognition, 2004, pp.564– 569. [31] D. Zhou and X. Yang, "Face Recognition Using Direct-Weighted LDA," in 8th Pacific Rim International Conference on Artificial Intelligence. Auckland, New Zealand, pp.760-768, 2004. [32] V. D. M. Nhat and S. Lee, "Block LDA for Face Recognition," in Computational Intelligence and BioinspiredSystems, vol.3512, Lecture Notes in Computer Science: Springer Berlin / Heidelberg, pp.899905, 2005. [33] Gian Luca Marcialis and Fabio Roli, “Fusion of LDA and PCA for Face Recognition”, Department of Electrical and Electronic Engineering - University of Cagliari Piazza d’Armi - 09123 Cagliari (Italy). [34] M. Bartlett and T. Sejnowski. “Independent components of face images: A representation for face recognition”. In Proc. the 4th Annual Joint Symposium on Neural Computation, Pasadena, CA, May 17, 1997. [35] B. Heisele, P. Ho, and T. Poggio, “Face recognition with support vector machines: Global versus componentbased approach,” Proceeding of ICCV, 2001. [36] G. Guo, S.Z. Li, K. Chan, “Face Recognition by Support Vector Machines.”Proc. of the IEEE International Conference on Automatic Face and Gesture Recognition, 2000. [37] Lin Shang-Hung, Kung Sun-Yuan, Lin Long- Ji, “Face recognition/detection by probabilistic decisionbased neural networks”, IEEE Trans.Neural Networks 8 (1), 114–132, 1997. [38] Brunelli and Poggio, “Face Recognition: Features Vs Templates”, IEEE Transactions on Pattern Ananlysis and Machine Intelligence, vol 15, no. 10, October 1993. [39] I. J. Cox, J. Ghosn, and P. N. Yianilos, "Feature based face recognition using mixture-distance," in Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, 1996, pp.209-216. [40]F.Samaira and S. Young, “HMM based architecture for Face Identification”, Image and Computer Vision,vol. 12, pp. 537-583,October 1994. [41] T. Kanade, “Computer Recognition of Human Faces.” Basel and Stuttgart Birkhauser, 1977 [42] T.F. Cootes, G.J. Edwards, and C.J. Taylor, “Active appearance models,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 23, no. 6, pp. 681–685, Jun. 2001 [43] V. Blanz and T. Vetter, “A morphable model for the synthesis of 3D faces,” in Proc. ACM SIGGRAPH, Mar. 1999, pp. 187–194. [44] A. Pentland, B. Moghaddam, T. Starner, “ViewBased and Modular Eigenspaces for Face Recognition ,” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, Washington, USA, pp. 84-91, 21-23 June 1994. [45] P. Penev and J. Atick, "Local Feature Analysis: A General Statistical Theory for Object Representation," Network: Computation Neural, 1996. [46] A. Lanitis, C. J. Taylor and T. F. Cootes, “Automatic Face Identification System Using Flexible Appearance Models,” Image Vis. Comput., 1995. [47] Huang, J., Heisele, B., and Blanz, V., “Componentbased face recognition with 3D morphable models”. In Proceedings, International Conference on Audio- and Video-Based Person Authentication, 2003 [48] Low-Resolution Face Tracker Robust to Illumination Variations, Wilman W. Zou, Member, IEEE, Pong C. Yuen, Senior Member, IEEE, and Rama Chellappa, Fellow, IEEE VOL. 22, NO. 5, MAY 2013 [49] Y. Xu and A. Roy-Chowdhury, “A physics-based analysis of image appearance models,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 33, no. 8, pp. 1681–1688, Aug. 2011. [50] R. Basri and D. Jacobs, “Lambertian reflectance and linear subspaces,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 25, no. 2, pp. 218–233, Feb. 2003. [51] X. Xie, W. Zheng, J. Lai, P. Yuen, and C. Suen, “Normalization of face illumination based on large-and small-scale features,” IEEE Trans. Image Process., vol. 20, no. 7, pp. 1807–1821, Jul. 2011. [52] X. Mei and H. Ling, “Robust visual tracking and vehicle classification via sparse representation,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 33, no. 11, pp. 2259–2272, Nov. 2011. [53] D. Ross, J. Lim, R. Lin, and M. Yang, “Incremental learning for robust visual tracking,” Int. J. Comput. Vis., vol. 77, no. 1, pp. 125–141, 2008. [54] M. La Cascia, S. Sclaroff, and V. Athitsos, “Fast, reliable head tracking under varying illumination: An approach based on registration of texturemapped 3D models,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 22, no. 4, pp. 322–336, Apr. 2000.