THREE-DIMENSIONAL BIOPRINTING OF HUMAN ORGANS
advertisement

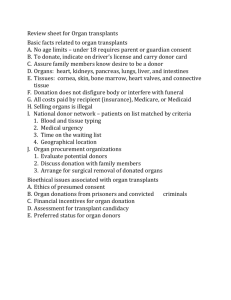
THREE-DIMENSIONAL BIOPRINTING OF HUMAN ORGANS: PHASES AND CONCEPTS Rodrigo A. Rezende, Júlia A. Nogueira, Frederico D. S. Pereira, Vladimir Mironov, Jorge V. L. da Silva Divisão de Tecnologias Tridimensionais, Centro de Tecnologia da Informação Renato Archer CTI, Campinas (SP), Brasil E-mail: rodrigo.rezende@cti.gov.br Resumo. The development of three-dimensional technologies, especially those related to 3D printing, coupled with the need for alternatives to modern medicine, especially those patients that appear on waiting lists for organ transplantation, has motivated research in the area of human organs bioprinting . This technique consists on layer-by-layer automated fabrication of human organs by additive manufacturing (or rapid prototyping). The process of bioprinting is basically divided in four main stages, the first three being directly dependent on information technology: design (blueprint), printing, maturation and implantation. Initially, the body must be virtually modeled and from information derived from medical images that are processed by software, for example, the known InVesalius developed in CTI. Then, the controlled deposition layer-by-layer of tissue spheroids containing living cells. After the printing stage, the body, not yet ready to be deployed, must be matured in a bioreactor until it is functionally able to be deployed. In this paper, we present an approach to the concept of bioprinting, and description of the bioprinting phases and results related to software, hardware and simulations that have been developed in the CTI. Keywords: Bioprinting, Biofabrication, Information Technology, Design, Simulation. 1. INTRODUCTION According to the Report from the International Conference on Bioprinting and Biofabrication in Bordeaux (3B’09), the field of bioprinting and biofabrication continues to evolve. The increasing number and broadening geography of participants, the emergence of new exciting bioprinting technologies, and the attraction of young investigators indicates the strong growth potential of this emerging field. (Guillemot et al., 2010). After the 2009´s conference, two other editions were held in Philadelphia (USA) and Toyama, Japan. This year, the International Conference on Bioprinting and Biofabrication will happen in Manchester, UK. The main technological and economic imperative in tissue engineering technology is a rapid tissue biofabrication. Thus, the challenge which developmental biology-inspired approach to tissue engineering is facing is the balanced combination of powerful biological insight with technological imperatives and constraints. Organ printing or the biomedical application of rapid prototyping, also defined as layer-by-layer additive biomanufacturing, is an emerging transforming biomimetic technology that has potential for surpassing traditional solid scaffold-based tissue engineering. Organ printing has certain advantages: it is an automated approach that offers a pathway for scalable, reproducible, mass production of tissue engineered products; it allows for precise simultaneous 3D positioning of several cell types; it enables creation of tissue with a high level of cell density; it can solve the problem of vascularization in thick tissue constructs; and finally organ printing can be done in situ. (Mironov et al., 2003a, 2008, 2009-a). Bioprinting of tissues and organs can be defined as layer-by-layer additive robotic biofabrication of three-dimensional functional living macrotissues and organ constructs using tissue spheroids as building blocks. The microtissues and tissue spheroids are living materials with certain measurable, evolving and potentially controllable composition, material and biological properties. Closely placed tissue spheroids undergo tissue fusion, a process that represents a fundamental biological and biophysical principle of developmental biology-inspired directed tissue self-assembly. After the tissue spheroids structuring, the tissue/organ newly made is then carried out into a bioreactor which should play an important role of providing an adequate environment to the growth and maturation of the bioproduct. Bioreactors are used to accelerate tissue maturation through the control of their mechanical, biochemical and thermal conditions. First of all, they should maintain the viability of the engineered tissue. Following, they are many times employed as equipment to the cell seeding and can be also applied to experimental and monitoring of maturation processes. The creation of a representative environment inside the bioreactor is too complex since it can enclose a large range of variables. Simulating this scenery is essential to the study. The success of tissues and organs bioprinting is straight linked to a set of an appropriate environment in the bioreactor that assures the feasibility, maturation, biomonitoring, tests, storing and transport of the involved elements on the generation of the new tissue such as the deposited cells and nutrients. As an example, the perfusion and fluid diffusion phenomena within the organs in maturation process in bioreactor is fundamental for understanding of the phenomenon. Moreover, computational fluid dynamic software packets have been increasingly developed during the past decade and are powerful tool to calculate flow fields, shear stresses and mass transport within and around 3D constructs, including a bioreactor environment. 2. BIOPRINTING AT A GLANCE Organ printing is a variant of the biomedical application of rapid prototyping technology or layer-by-layer additive biofabrication of 3D tissue and organ constructs for replacement, repair and regeneration of damaged and diseased human organs and tissues. Since its inception (Mironov et al., 2003 a) the concept of organ printing using robotic bioprinters for the layer-by-layer additive biofabrication of functional 3D tissues and organ constructs using self-assembling tissue spheroids has undergone progressive development (Jakab et al., 2010; Mironov et al., 2009; Visconti et al., 2010) and gradually gained recognition as a reasonable bottom-up solid scaffold-free alternative to the classic top-down or solid scaffold-based approach to tissue engineering (Nichol and Khademhosseini, 2009). As Dr. David Williams an editor of journal “Biomaterials” and President of TERMIS (Tissue Engineering and Regenerative Medicine International Society) stated in recent influential review: ‘‘There is obviously some way to go before such a paradigm (directed tissue self-assembly) could be translated into a practical reality, but many steps have been taken’’ (Williams, 2009). The report on the 4th International Bioprinting and Biofabrication Conference (2009) that took place in Bordeaux, France, stated that ‘bioprinting is coming of age’. The increasing number of papers and reviews, publication of the first books (Guillemot et al., 2010), the rapid development of new bioprinting and biofabrication research centers around the world, creation of the new “Biofabrication” journal and International Society for Biofabrication (2010) and, most importantly, the development of commercially available bioprinters are all important progress milestones. The potential competitive advantage with the use of self- assembling tissue spheroids for organ printing has been recently reviewed (Mironov et al., 2008; Mironov et al., 2009; Visconti et al., 2010). It has been suggested that the bottom-up solid scaffold-free approach can enhance the development of tissue engineering technology by enabling the automated and robotic industrial scale organ biofabrication (Mironov et al., 2009). History of the automobile industry and the emergence of microelectronic industry have taught us that an automated robotic approach is required for the successful development of new commercially profitable industries. The combination of computeraided robotics and tissue engineering will not only enable tissue and organ bioassembly at large industrial scale, but will also provide the necessary level of flexibility for patient specific, customized organ biofabrication. It is become increasingly obvious that, from a systems engineering point of view, it will take more than just bioprinters to biofabricate complex human tissues and organs. Indications suggest that the development of series of integrated automated robotic tools, or an organ biofabrication line (OBL) is required. Components of the OBL must include a clinical cell sorter, stem cell propagation bioreactor, cell differentiator, tissue spheroid bio- fabricator, tissue spheroids encapsulator, robotic bioprinter, and perfusion bioreactor. Organ printing, is a rapidly emerging technology that promises to transform tissue engineering into a commercially successful biomedical industry. It is increasingly obvious that similar well established industries implement automated robotic systems on the path to commercial translation and economic success. The use of robotic bioprinters alone however is not sufficient for the development of large industrial scale organ biofabrication. The design and development of a fully integrated organ biofabrication line or development of series of integrated automated robotic tools is imperative for the commercial translation of organ printing technology. Development of integrated line of automated robotic tools for biofabrication at industrial scale requires a complex multidisciplinary approach and close research and development collaboration of mechanical engineers, experts in rapid prototyping technology, computers scientists, chemical engineers and material scientists with biologists and tissue engineers. Recent white paper from MIT stated that third revolution in biomedical science (first revolution was based on discovery of DNA structure, second revolution was based on Human Genome Project) will be based on close integration of biology, engineering and physical sciences. Emerging Bioprinting and 3D Tissue Biofabrication technologies which combine biology, engineering and material sciences (Figure 1) is probably one of the best manifestation of above described third biomedical revolution and, thus, represents new research paradigm in tissue engineering. Figure 1 – Biofabrication/Bioprinting as interdisciplinary research field. 3. STAGES OF THE BIOPRINTING Organ printing technology using analogy with rapid prototyping technology can be divided on three most important steps: pre-processing, processing and postprocessing (Figure 2). Figure 2 – Three main steps in organ printing technology. 3.1 Pre-Processing Preprocessing can be defined as development of computer-aided design or “blueprint” of 3D human tissue and organ based on using clinical imaging modalities and special rapid prototyping softwares (Figure 3). Blueprint in STL file is actual instruction for robotic bioprinter how to print 3D tissue construct. It is not possible to bioprint human organ and tissue without development of CAD based “blueprint”. Figure 3 – From blueprint to final structures. Realization of rapid prototyping technology is impossible without computer science and the corresponding software. Acquisition of clinical images using modern imaging modalities and transforming them into computer-aided design (CAD) and STL files are important and essential steps in the bioprinting process. Mathematical modeling could be also used for prediction kinetics of cell seeding, tissue ingrowth, oxygenation and vascularization of bioprinted tissue constructs (Guillemot et al., 2010). 3.2 Processing Processing or actual computer-aided robotic bioprinting include preparation of “bioink” or self-assembled tissue spheroid, development of “bio-paper” or processible and biocompatible hydrogel and using “robotic bioprinter” or computer controlled robotic précised dispenser (Figure 4). There are already several commercially available 3D bioprinters and robotic dispenser. CTI has Biofab@CTI bioprinter. Figure 4 – Example of digital (droplet generating) microfluidic device (http://www.dolomite-microfluidics.com/en/new-prods/droplet-systems). 3.3 Post-Processing The immediate outcome of bioprinting is not functional and viable organ. It is important to realize that it takes time for bioprinted tissue spheroids to fuse and bioprinted tissue to assemble, compact, remodel and mature into functional tissue constructs. In order to turn these bioprinted constructs into functional tissue and organs suitable to clinical implantation into human body they must undergo process of tissue fusion, tissue remodeling and functional tissue maturation. This process must be realized in specially designed perfusion chamber or “bioreactors” in relatively short time (days or weeks not months). Perfusion bioreactor based “accelerated tissue maturation” requires non-invasive and non-destructive monitoring of bioprinted tissue maturation. Post-processing is probably the most essentially crucial step in organ printing technology, and effective post-processing or accelerated tissue maturation will require the development of new types of bioreactors, more efficient accelerated tissue maturation technologies as well as methods of non-invasive and non-destructive biomonitoring. 4. ESSENTIAL COMPONENTS FOR ORGAN BIOFABRICATION LINE The idea of the Organ Biofabrication Line is presented in Figure 5. Figure 5 – Organ Biofabrication Line. 4.1. Robotic Tissue Spheroid Biofabricator The development of scalable methods to biofabricate uniformly sized tissue spheroids is essential for enabling the bioprinting of large tissue and organ constructs because each require millions of tissue spheroids. The majority of existing methods of tissue spheroid biofabrication are not scalable. For example, it would take 100 Petri dishes to generate 5 thousands tissue spheroids using the hanging drop method of tissue spheroid fabrication (Kelm and Fussenegger, 2004; Mironov et al., 2003 b). Recently, a novel elegant method was introduced whereby tissue spheroids were biofabricated using micromolded non-adhesive hydrogel (agarose) (Dean et al., 2007; Napolitano et al., 2007 a,b). These densely placed micromolded recessions with rounded bottoms in hydro- gel allowed for the biofabrication of uniformly sized tissue spheroids (Mehesz et al., 2011). The use of this approach in combination with a robotic dispenser (for example, ‘EpMotion-5070’, Eppendorf) increases the productivity of tissue spheroids biofabrication for production of up to five thousand tissue spheroids of standard size on one 96 well multiwall plate (Figure 6). Recent advances in digital (droplet-based) microfluidics offered a new exciting perspective to bio- fabricate thousand tissue spheroids with complex internal structure and composition in seconds using a relatively cheap and elegantly designed cascade droplet generator (Shah et al., 2008). Thus, the development of scalable robotic tissue spheroid biofabricators for the automated biofabrication of uniform sized tissue spheroids is a feasible and achievable goal. Figure 6 – A 96 multiwell designed and rapid prototyped plate at CTI. 4.2. Robotic Bioprinter Bioprinters are a key element of organ printing technology (Jakab et al., 2010; Mironov et al., 2008, Mironov et al., 2009). The emergence of commercially available bioprinters is probably the most remarkable development of the past decade (Figure 7). The explosive growth of different variants of bioprinting technology resembles the early development phase of rapid prototyping technology 10–15 years ago, when many completing technologies were developed but not all of them successfully commercialized. Robotic bioprinters for the precise dispensation of tissue spheroids include three essential elements: X–Y–Z axis robotic precision position system, automated biomaterial dispensers and computer-based software enabled operational control. Tissue spheroids bioprinting of satisfactory resolution have been already demonstrated. Figure 7 – The in-development bioprinter in CTI. 4.3. Irrigation dripping tripled perfusion bioreactor The conceptual design of novel irrigation dripping tripled perfusion bioreactors with temporally removable porous minitubes suitable for bioprinting (Figure 8) is already under development and experimental using Computational Fluid Dynamic software at CTI (Mironov et al., 2009; Rezende et al., 2011 b). The design is a triple perfusion bioreactor because it has three circuits: one for maintaining a wet environment around the bioprinted construct, the second for media perfusion through an intraorgan branched vascular tree, and the third and most essential circuit, for temporal perfusion. The last type of perfusion is undertaken using extremely strong, thin, porous, non-biodegradable, removable minitubes that serve as temporal supports and artificial microchannels. The main goal of the proposed dripping irrigation circuit system is to ‘buy’ time until the ‘built in’ intra-organ branched vascular system will mature sufficiently for the initiation of intravascular perfusion. Moreover, this temporal perfusion system can be used for the delivery cells, soluble extracellular matrix molecules and maturogens. The rational design behind such a bioreactor, especially the level of porosity and distance between minitubes, must be based on systematic mathematical modeling and computer simulation of interstitial flow. The identification of proper materials and coatings of these minitubes, and the optimal way to retrieve the inert minitubes without severe tissue injury are other important engineering challenges. Figure 8 – Scheme of the irrigation dripping tripled perfusion bioreactor. 5. REFERÊNCIAS Mironov, V.; Boland, T.; Trusk, T.; Forgacs, G.; Markwald, R. (2003a). Organ printing: computer-aided jet-based 3D tissue engineering. Trends Biotechnol., 21, pp. 157–161. Jakab, K.; Norotte, C.; Marga, F.; Murphyk. Jakab, C. Norotte, F. Marga, K. Murphy, G. VunjakNovakovic and G. Forgacs. (2010). Tissue engineering by self-assembly and bio-printing of living cells. Biofabrication, 2, p. 022001. Mironov, V.; Kasyanov, V.; Drake, C.; Markwald, R. (2008). Organ printing: promises and challenges. Regen Med., 3, pp. 93–103. Mironov, V.; Visconti, R.; Kasyanov, V.; Forgacs, G.; Drake, C.; Markwald, R. (2009-a). Organ printing: tissue spheroids as building blocks. Biomaterials, 30, pp. 2164–2174. Mironov, V.; Zhang, J.; Gentile, C.; Brakke, K.; Trusk, T.; Jakab, K. Forgacs, G. Kasyanov, V.; Visconti, R.; Markwald, R. (2009-b). Designer ‘blueprint’ for vascular trees: morphology evolution of vascular tissue constructs. Virtual Phys. Prototyping, 4, pp. 63–74. Visconti, R.; Kasyanov, V.; Gentile, C.; Zhang, J.; Markwald, R.; Mironov, V. (2010). Towards organ printing: engineering an intra-organ branched vascular tree. Expert Opin. Biol. Ther., 10, pp. 409–420. Nichol, J.; Khademhosseini, A. (2009). Modular tissue engineering: engineering biological tissues from the bottom up. Soft Matter, 5, pp. 1312–1319. Williams, D. (2009). On the nature of biomaterials. Biomaterials, 30, pp. 5897–5909. Guillemot, F.; Mironov, V.; Nakamura, M. (2010). Bioprinting is coming of age: report from the International Conference on Bioprinting and Biofabrication in Bordeaux (3B’09). Biofabrication, 2, p. 010201. Kelm, J.; Fussenegger, M. (2004). Microscale tissue engineering using gravity-enforced cell assembly. Trends Biotechnol, 22, pp. 195–202. Mironov, V.; Markwald, R.; Forgacs, G. (2003b). Organ printing: self-assembling cell aggregates as a “bioink”. Sci Med, 9, pp. 69–71. Dean, D.; Napolitano, A.; Youssef, J.; Morgan, J. (2007). Rods, tori, and honeycombs: the directed selfassembly of microtissues with prescribed microscale geometries. FASEB J, 21, pp. 4005–4012. Napolitano, A.; Chai, P.; Dean, D.; Morgan, J. (2007a). Dynamics of the self-assembly of complex cellular aggregates on micromolded nonadhesive hydrogels. Tissue Eng, 13, pp. 2087–2094. Napolitano, A.; Dean, D.; Man, A.; Youssef, J.; Ho, D.; Rago, A. Lech, M.; Morgan, J. (2007b). Scaffoldfree three-dimensional cell culture utilizing micromolded nonadhesive hydrogels. Biotechniques, 43, 494, 496–500. Mehesz, A.; Brown, J.; Hajdu, Z.; Beaver, W.; Silva, J.; Visconti, R.; Markwald, R.; Mironov, V. (2011). Scalable robotic biofabrication of tissue spheroids. Biofabrication. 2, Jun;3(2):025002. Shah, R.; Shum, H.; Rowat, A.; Lee, D.; Agresti, J.; Utada, A.; Chu, L.; Kim, J.; Fernandez-Nieves, A.; Martinez, C. (2008). Designer emulsions using microfluidics. Mater Today, 11, pp. 18–27. Rezende, R.; Pereira, F.; Kemmoku, D.; Mironov, V.; Kasyanov, V.; Vilbrandt, T.; Silva, J. (2011a). Enabling Technologies for Robotic Organ Printing. "Innovative developments in virtual and physical prototyping", P.J. Bártolo et al., published by Taylor & Francis. (in press). Rezende, R.; Laureti, C.; Mironov, V.; Kasyanov, V.; Maciel Filho, R.; Silva, J. (2011b). Towards Simulation of a Bioreactor Environment for Biofabricated Tissue Maturation. "Innovative developments in virtual and physical prototyping", P.J. Bártolo et al., published by Taylor & Francis. (in press). 6. ACKNOWLEDGEMENTS This work was sponsored by São Paulo Research Foundation (FAPESP), The Brazilian Institute of Biofabrication (INCT-BIOFABRIS) and The National Council for Scientific and Technological Development (CNPq).