doc

Copyright © 2007 IFAC
The 5 th IFAC Intl. WS DECOM-TT 2007, May 17-20, Cesme, Turkey
THE TITLE OF THE PAPER, IN BOLD CAPITAL LETTERS, CENTRED,
NOT MORE THAN 10 WORDS. USE <SHIFT><CR> FOR LINE BREAK
Names of the Authors (consecutively), upper and lower case, boldface, centred, 127 mm (5 in) width
Authors’ affiliations (one after the other; enumerated), Italics, upper and lower case, centred, 127 mm (5 in) width (maximum);
E-mail(s): ???
Abstract: Abstract of 50–100 words, 127 mm (5 in) width (maximum), justified
Xxxx xxxx xxx xxx xx xxxxxxx xxxxxxxx xx x xxxxxx xxxxxxxxx xxxxx xxxxxxxxxx xxxxxx xxxxxxxxxxxxxxxx xxxxxxxxxx xxxxx xxxxxx xxxx xxxxxx
Please insert a copyright notice (in italics and all on one line) following the last
word in the abstract as shown in this example. Copyright © 2007 IFAC
Keywords: 5–10 keywords (taken from the IFAC list on this website), 127 mm
(5 in) width (maximum), left justified.
1. INTRODUCTION - MAIN HEADING,
CENTRED, CAPITAL LETTERS 1
Text of paper, 76 mm (3in) column width, with 8 mm
(.3in) space between. Use full 253 mm (10 in) space equivalent to one line of text footnotes whenever possible.
. Please, avoid
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx column length. Paragraphs should be justified, using single spacing, with no paragraph indentation. Use xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Times Roman font, 10 point. Leave one clear line between paragraphs within a section; two clear lines
before a main or secondary heading.
1.1 Secondary Heading, numbered, left justified,
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx.
Tertiary Heading; Italics or underlined, No number, text run-on.
Xxxxx xxxxx xxxxx xxxxxx xxxx xxxx xxxxx xxxxxxx xxxxxxx X xxxxxxxxxxxxxx xxxxxx xxxxxxxx xxxxxxxxxx xx xxxxx xxxx following lines indented, Italics or underlined .
Xxxxxxxxxxxxx xxxxxxxxxxxxx xxxxxxxxxxxxxx. xxxxx xxx xxxxxx xxxxxxxxxx xxxxxxxx xxxxxxxxxxxx xxx xxxxx xx xxxxxxxx xxxx xxxxxxx xxx xxxxxx xxx xxxxx xxxxxxx xxxxx xxxx xxxxxx xxxxx xxx x xxxx xxxxx xxxxxx xxxxx. x.xxxx xxxxxx xx xxxx xxxxxxx xxxx xxxxxxxxx x xxx xxxxxxxxx xxxx xxxxxxxx. xxxxx xx xxxxx xxxxxx xxxx xxx xxxxx xx x. xxxxx xxxxx xxxxxxx xx xxx x.
xxxxx xxx xxxx xxxxxxx xxx xxxxxx xxxx xxxxx x.
1 Number footnotes consecutively with superscript numbers.
Leave a one-line space above and below the footnote line.
In the PDF version, the character “ ” is used to represent a
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx Avoid leaving a heading at the bottom of a column, with the subsequent text starting at the top of the next page/column. Use extra spacing (between earlier figures or sections) to push the heading up to the top of the same column as its text. In view of the tight
page constraints, however, do please make the fullest possible use of the text area.
Citing references!
Where a publication is referred to in the text, enclose the authors’ names and the date of publication within the brackets, see (Brown, et al ., 1994). For one author, use author’s surname and the date (Smith,
1991). For two authors, give both names and the date
(Smith and Jones, 1992). For three or more authors, use the first author, plus “ et al.
”, and the date
(Morris, et al ., 1990a). If giving a list of references --
-
see the end of this template.
2. SECOND SECTION TITLE
Tables!
A compact GPS unit is a convenient positioning system that directly gives the absolute longitude, latitude and height coordinates of the object (Bi, Hu,
Zhu & Sun, 2003). However, the position information provided by the commercial GPS unit is subjected to disturbance that causes the error in measurements. There are many sources of possible errors that will degrade the accuracy of positions computed by a GPS receiver. Table 1 shows these error sources and their values (Redmill et al., 2001).
Table 1 Typical GPS error sources and their quantities (in meters).
Error Source
Orbit errors
Ionosphere effects
Troposphere effects
Multipath distortion
Receiver noise
Selective availability (SA)
2.5
5.0
0.5
1.0
0.6
30.0
Effect
Satellite clock errors
2.0
He, Wang, Phain & Yu (2002) consider the application GPS-based navigation systems on various fields. Specifically, GPS has a broad application area in vehicle localization and navigation systems. Since the SA (selective availability error) degradation has been switched off by U.S. Government in June 2000, standard GPS measurement accuracy increased around 30 meters. As a result, this improvement has enhanced civil applications of GPS, primarily for general navigation tasks, even with the aid of ordinary, everyday (low-cost) GPS receivers.
Ponomaryov, Pogrebnyak, Rivera & Garcia (2000) employed only DGPS to improve accuracy in GPS position and velocity, and then presented a modified
Kalman filter for DGPS, to enhance the estimation of the position and velocity. Their experimental results showed that with that application their positional errors were about 5 meters (Ponomaryov et al .,
2000).
Figures!
According to (Zogg, 2002), the same GPS satellite errors are valid for any receiver within a radius of
200 kilometers, since they all use the same satellites.
RF Antenna
(Transmit-
Receive) station
RS-232 Serial
Communication
Mobile GPS
RF Antenna
(Transmit-Receive)
Computer (Runs the DGPS algorithm, Kalman filter algorithm and the control algorithm)
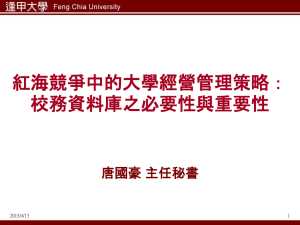
Fig. II General working philosophy of the vehicle navigation.
The figure above (Figure II) shows the guidance of the vehicle schematically. Both coordinates; namely, longitude and latitude, should ensure the condition that they must be lower than 1 meter. Figure III and
IV show the realization of the guidance philosophy in longitudinal criterion.
Kalman Filter Results
27.2308
27.2308
27.2307
27.2307
27.2306
27.2306
27.2305
27.2305
27.2304
0 20 40 60 80 sample time
100 120 140
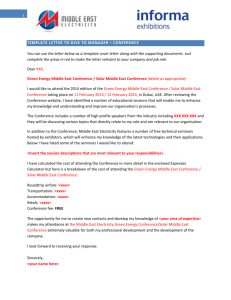
Fig. V Longitude coordinate of the desired location and the filter performance.
In Figure V, it is seen that at the end of the control algorithm (after 133 seconds) the longitudinal distance to the desired longitude is computed as
0.4019 meters.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx.
3. THIRD SECTION TITLE
Equations!
Equations are to be centred and, in principle, have to be enumerated, beginning with (1) until the last number needed: Within in the text, they are cited solely by the respective number or by Eq. (number), inequality (number) or formula (number).
The state-space model and the filtering equations are x k
1
Φ k x k
w k
( 1) z k
H k x k
v k
(2) where x k
x ( k ) y ( k ) v x
( k ) v y
( k )
T
(3)
Φ k
1
0
0
0
0
1
0
0
T
0
1
0
0
T
0
1
(4) w k
0 z k
0
z w
1
( k ) x
( k ) w
2
( k )
T
(5) z y
( k )
T
(6)
H k
1
0
0
1
0
0
0
0
, v k
v
1
( k ) v
2
( k )
T
(7) where v x
( k ) and v y
( k ) are latitude and longitude velocities, respectively. The discrete Kalman filter equations for the system are:
… … …
4. CONCLUSION
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxx.
REFERENCES
Brown, R. G. (1983). Introduction to random signal analysis and Kalman filtering . John Wiley &
Sons, New York.
Grewal, M. S., and A. P. Andrews (2001). Kalman filtering: Theory and practice using MATLAB
(2nd ed.). John Wiley & Sons, New York.
Kutay, A. T., Y. Tulunay, E. Tulunay, and O.
Tekinalp (2001). Neural network based orbit prediction for a geostationary stalite (Plenary
Paper 2). In: Automatic Systems for Building the
Infrastructure in Developing Countries 2001-
Proceedings of the 2 nd IFAC DECOM WS (G. M.
Dimirovski (Ed.)), Ohrid, MK, pp. 3-14.
Pergamon Elsevier Ltd, Oxford, UK.
Kalman, R. (1960). A new approach to linear filtering and prediction problems. Journal of Basic
Engineering, Trans. of the ASME , Series D , 82
(1), 35-45.
Kobayashi, K., Cheok, K. C., Watanabe, K.,
Munekata, F. (1998). Accurate differential global positioning system via fuzzy logic Kalman filter sensor fusion technique. IEEE Transactions on
Industrial Electronics , 45 (3), 510-518.
Negenborn, R. (2003). Robot localization and
Kalman filters, on finding your position in a noisy world , M.Sc thesis. Retrieved May 14,
2006, from http://www.negenborn.net/kal_loc/.
Ponomaryov, V. I., O. B. Pogrebnyak, L. N. de
Rivera, and J. C. S. Garcia, (2000). Increasing the accuracy of differential global positioning system by means of use the Kalman filtering technique. In: Proceedings of the 2000 IEEE
International Symposium on Industrial
Electronics, Vol. 2, 637-642. The IEEE,
Piscataway, NJ.
Qi, H., Moore, J. B. (2002). Direct Kalman filtering approach for GPS/INS integration. IEEE
Aerospace and Electronic Systems Magazine , 38 ,
687-693.
Roumeliotis, S. I., and G. A. Bekey (2000).
Collective localization: A distributed Kalman filter approach to localization of groups of mobile robots. In: Proceedings of the 2000 IEEE
International Conference on Robotics &
Automation, San Francisco, CA, pp. 2958-2965.
The IEEE, Piscataway, NJ.
Simon, D. (2001). Kalman Filtering . Retrieved May
07, 2006, from http://academic. csuohio.edu
/simond
Simon, D., El-Sherief, H. (1995). Real-time navigation using the global positioning system.
IEEE Aerospace and Electronic Systems
Magazine , 10 (1), 31-37.
Zogg, J. M. (2002). GPS Basics, Introduction to the
System, Application Overview . Retrieved June
05, 2006, from http://www.u-blox.com