Kinetics: Model Simulation and Analysis

Kinetics: Data Collection and
Analysis
The simplest types of kinetic experiments involve monitoring the concentration of reactants and/or product with time. Let’s consider some instrumentation that might be used for the purpose of direct measurement of concentrations as a function of time.
Some Spectroscopic Methods
1. UV-Visible Spectrometer
Pros: widely available, good sensitivity, excellent linearity, fast time response, cheap
Cons: need chromophores, absorption data are not very specific, may need extinction coefficients
2. IR Spectrometer
Pros: Most reactions have some kind of change in the IR, reasonable sensitivity, cheap
Cons: need IR chromophores, more expensive,
FTIR has some time scale restrictions (seconds), may need extinction coefficients.
3. NMR Spectrometer
Pros: Very specific information, no need for extinction coefficients, by-products seen exactly.
Cons: Slower time scales (10 of seconds), expensive, moderate sensitivity (ca. mM conc’s).
Kinetic Analysis with Spectrophotometric Data
Let ’s say that we collect data from an instrument where the instrument reading is proportional to the concentrations of various reagents. Assume a reaction which has some order a in [A], which is the limiting reagent. All other reagents are present in excess. aA + bB
pP + qQ
The instrument reading at any time t is:
Y t
y
A
[A]
y
B
[B]
y
P
[P]
y
Q
[Q]
C
The initial and final readings are (because A is limiting):
Y
0
Y
y
A
y
B
[A]
0
[B]
0
y
B
b a
[B]
0
[A]
0
C
y
p p a
[A]
0
y
Q q a
[A]
0
C
Y t
At any point in time, the instrument reading Y t becomes
y
A
[A] t
y
B
[B]
0
b
[A]
0 a
b a
[A] t
y
P p a
[A] t
y
Q q
[A] t a
C
The equation given above simplifies, with substitutions from the prior two equations to
[A] t
[A]
0
Y t
Y
0
Y
Y
For a reaction which is first-order in A this becomes:
Y t
Y
Y
0
Y
Quench Methods
e
kt
These methods involve running the reaction for some time and then stopping the reaction by addition of a quenching agent (e. g., something that reacts irreversibly with a catalyst or reactant) or by thermal quench. The reaction can then be analyzed by any of the spectrometric methods given above or by others
(gas or liquid chromatography, mass spectrometry, radioassays, mass, etc.).
Quench
agent product
Berger Ball
Mixers
Catalyst monomer
Gas Uptake (Constant Concentration Methods)
Often a reaction, particularly catalytic reactions, involve the consumption or liberation of a gas. Two methods for monitoring the gas uptake arise: (1) monitor the gas pressure with time or (2) maintain constant pressure in the reactor by adding enough gas to maintain constant pressure. The consumption
(or liberation) of gas can be monitored via the pressure of a reservoir which feeds gas into the reactor. The advantage of the latter method is that it maintains constant concentration of the gas. This simplifies kinetic analysis because it removes an element of change during the reaction.
There are a variety of analogs to this method.
For example, a pH meter can control a burette to maintain constant pH during a reaction and the
kinetics can be monitored by changes in the burette level.
Fast Kinetic Methods
For reactions that can be initiated with photons, flash photolysis constitutes a sensitive, rapid method for following reactions.
The most general method for following rapid chemical reactions is to initiate mixing in a stoppedflow or continuous-flow apparatus. Detection commonly is accomplished by UV-Visible spectrometry. In a stopped-flow instrument, two syringes filled with reagents are rapidly pushed (linear velocities ca. 3-15 ms -1 ) through a mixer where turbulent mixing occurs. In the stopped-flow instrument, the mixed solutions fill a “stoppingsyringe” for which the motion stops when the plunger hits a mechanical stop. At this point (t=0) the observation cell is filled with freshly mixed solution
(mixing time of 2-3 ms) and the reaction can be monitored spectrophotometrically.
Statistical Analysis of Data: Fitting
Procedures
In this section we will begin to analyze real data with a focus on the application of non-linear least squares methods. We begin with the primary step of collecting time series data and its analysis. Our procedure is:
1. To assume a kinetic model that describes the data
2. To optimize the parameters for that model by minimizing the sum of the square deviations between computed and observed data.
3. To estimate the error in the fitting parameters
4. To test our optimized model against other valid models.
Our methods will not correspond exactly to what you may have learned previously. For example the rate constants for a simple first order reaction will NOT be obtained by plotting ln(A t
-A ) vs time. Our approach is always to fit observed data with minimal manipulation of what is observed. The act of taking the logarithm of observed data adds bias to the analysis by selectively compressing and expanding different regions of the time series in a way that is not consistent with natural uncertainties in the data.
Some useful references:
1) Zielinski, T. J.; Allendoerfer, R. D. J. Chem. Ed.
1997 , 74 , 1001-1007.
2)Bevington, P. R. Data Reduction and Error Analysis for the Physical Sciences ; McGraw-Hill: New York,
1969.
3)Press, W. H.; Teukolsky, S. A.; Vetterling, W. T.;
Flannery, B. P. Numerical Recipes: The Art of
Scientific Computing, 2 nd Ed.
; Cambridge University
Press: Cambridge, 1992.
A Simple Example: Exponential Increase in an
Absorbance
This discussion has a companion Mathcad sheet:
06Fit1.mcd
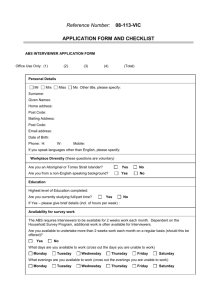
In this document we begin with the computation of the
Absorbance at 10 time points using a pseudo-first order rate constant of 0.2 s -1 , Abs
0
=0.34, and
Abs
=1.87. The equation is:
Abs t
Abs
(Abs
0
Abs
)e
kt time 0 1 2 3 4 5 6 7 8 9
Abs 0.34 0.62 0.84 1.03 1.18 1.31 1.41 1.49 1.56 1.62
The next step is to add some random noise that simulates experimental noise. In this case we add more noise than one might expect from a spectrophotometric experiment: noise with a standard deviation of ca. 0.05(requested; actual is
0.049).
The non-linear least square problem that we now set up to optimize the values of Abs
0
, Abs , and k involves the following assumptions:
1. The kinetic model is correct
2. The data are representative
3. The observed data are statistically uncorrelated: each observation is taken to be the true value plus a random component. This means we assume, among other things, no systematic error.
4. All data have the same variance.
We next define an error function for the non-linear least square fitting. This is wSSD, the sum of the square deviations, between observed and calculated data. Here the “w” of wSSD means that all of the data are weighted by the variances of the observed absorbances. N. B., in this case (1) the variances of all data points are the same and (2) are given by the variance of the added noise. Use of identical variances for all data points is justified when the measurements have a constant noise level. For
example, in a spectrophotometric measurement the the absorbance at each time point is accurately described as having constant noise in Absorbance
Units. When the data span different orders of magnitude and constant percentage noise is present
(such as rate constants collected over a wide temperature range) it is important to weight the data accordingly.
The error function wSSD is:
Abs t obs
Abs t calc
2
wSSD
all time points, t
y t
t
2 obs
Abs
(Abs
0
Abs
all time points, t
2 t
Optimization with the Mathcad solver gives the
)e
kt
2
following parameter values: k = 0.159 Abs
0
=0.383 Abs
=1.982 compared with the following true values k = 0.20 Abs
0
=0.340 Abs =1.87
Clearly the optimized parameters are not very close to the true values due to the noise added to the sample.
Our next goal is to estimate the errors in the parameters.
Estimations of errors in the parameters are based on the following reasoning. Optimization is essentially a procedure in which one changes the values of the parameters until the wSSD does not change with small changes in the parameter values. In other words, this is a minimum in which the derivative of wSSD with respect to each of the parameters is ca. 0.
At this point the second derivatives (or curvature) of the wSSD with respect to the parameters indicates the steepness of a well in which the vertical dimension is the wSSD value and the horizontal direction is the parameter value. High curvature means the “well” is steep, which is equivalent to saying that the uncertainty in parameters is small.
Uncertainty in the parameter and the curvature are inversely related.
In the Mathcad document a curvature matrix (alpha) is constructed. This matrix is then inverted (alpha -1 ) to give the covariance matrix. The diagonal elements of the covariance matrix can be converted into the estimated uncertainties in the parameters by the following equation: std. error in j th
parameter = wSSD
cov ar j,j no. of points where covar j, j
is the appropriate diagonal element of the covariance matrix
With this procedure the parameters with standard errors() are: k = 0.159(25) Abs
0
=0.383(32) Abs =1.982(136) compared with the following true values k = 0.20 Abs
0
=0.340 Abs =1.87
N.B. The true value of the rate constant lies outside
±std.dev. in the rate constant for this set of values!
This is due to the small number of data points with large noise which does not center on 0 (see the mean of the noise on the mathcad document).
The same data have been analyzed using the Solver function of Excel on the Spreadsheet:
06Fit2.xls k=0.141 Abs
0
=0.327 Abs inf
=2.231
N. B. the values are not quite the same due to small differences in the values used in the two computations, different algorithms for non-linear least squares, and different convergence criteria.
Unfortunately it is not so easy to compute the estimated errors in the Excel spreadsheet because it lacks the derivative functions.
Estimating Uncertainties in Fitted
Parameters Using Bootstrapping
Most often one does not know the individual variances of the observed data points and it is not always clear whether the assumptions of non-linear least squares methods are actually satisfied by the data. In these very real situations another useful approach to estimating error in the data exists: bootstrapping. The idea with bootstrapping is to form a large number (ca. 1000) “synthetic” data sets from the real data set by randomly drawing out data points.
Imagine your data in a spreadsheet in which each row corresponds to a data point (with, for example, a time and absorbance column). If you have 100 data points you will randomly choose a row number and put that data point into the new synthetic data set while keeping the original data set unchanged. Repeat this until your synthetic data set has 100 points and that will be synthetic data set #1. On average this synthetic set will have about 37% of the original points replaced by duplicates.
Now you will create another 999 synthetic data sets.
Each synthetic data set is subjected to non-linear least squares optimization of the parameters to give distributions of estimated parameters. These distributions can then be analyzed to get means, medians, and standard deviations. I am working on
an Excel Spreadsheet to show you how to make such an analysis.
Which Model is Better? Using the F-Test to Compare Two Models.
So far we have explored how to perform nonlinear least squares optimizations of different model parameters and estimate their uncertainties. Often there is a reasonable, alternative model to consider.
The F-Test provides a statistical basis for comparing the two models which may have different numbers of parameters.
We will consider a problem out of the very recent literature: what is the order in [propene] for the propagation of polypropylene at a metallocene catalyst?
Without going into too much detail, the authors wanted to test two models for the meso content of the polymer. One model was a three parameter fit and the second was a two parameter fit. Of course the three parameter fit gave a lower SSD, but is it a significantly better model? See the Mathcad
Document for details
06F-Test.mcd
Obtaining Activation Parameters from
Data
Up to this point our analysis has focused on obtaining rate constants. Activation parameters, also, are obtained by fitting data. Working from the philosophy that one should seek to preserve the data in its least altered form the following list represents possible approaches to finding activation parameters:
1. Take ALL the experimental data under various conditions and assume a rate law. Using ALL primary data solve for
H
‡
and
S
‡
by replacing the rate constant with k
k
B
T e
S‡
R h e
H‡
RT
R
8 .
31458 JK
-1 h
6 .
6262
10
34
Js k
B
1 .
3807
10
23
JK
1
Use either estimated errors in the fit or the bootstrap method to get errors in the parameters
2. Use the fitted values of the rate constant at each temperature along with the variances and fit
H
‡ and
S
‡
to give the best agreement. Errors as above.
3. Last and Least: linear regression of ln(k/T) vs.
1/T
A major concern with determination of Activation
Parameters is the weighting of data. Assume that the errors are a constant percentage of the rate constants and the rate constants vary considerably over the temperature range studied. Not using weighting is equivalent to saying that the absolute variances in the rate constants are the same at all temperatures: a highly unlikely scenario.
Are the Estimated Parameters
Correlated?
A type of correlation matrix can be derived from the covariance matrix as follows. The correlation, or interdependence of two fitted parameters, is estimated from the off-diagonal element of the covariance matrix divided by the square root of the product of the two diagonal elements.
Corr ij
Co var ij
Co var ii
Co var jj
The values of the correlation matrix elements run from
–1 to 1 with a value of 0 indicating no correlation.