Ch2 Fluid Statics
advertisement

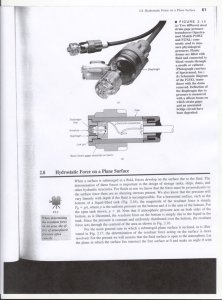
Ch2 Fluid Statics Fluid either at rest or moving in a manner that there is no relative motion between adjacent particles. No shearing stress in the fluid Only pressure (force that develop on the surfaces of the particles) 2.1 Pressure at a point N/m2 (Force/Area) F ma Fy Py x z Ps x s sin Y: Fz Pz x y Pz x s cos x y z 2 x y z az 2 ay Z: x y z 2 az y s cos ; z s sin y : p y p s a y y 2 z : p z p s ( a z ) What happen at a pt. ? p y ps p z ps z 2 x, y, z 0 p y p z ps is arbitrarily chosen Pressure at a pt. in a fluid at rest, or in motion, is independent of direction as long as there are no shearing stresses present. (Pascal’s law) 1 2.2 Basic equation for Pressure Field How does the pressure in a fluid which there are no Shearing stresses vary from pt. to pt.? Surface & body forces acting on small fluid element Pressure weight Surface forces: y : Fy ( p Fy p y p y ) x z ( p ) x z y 2 y 2 p x y z y Similarly, in z and x directions: Fx Fs Fx i Fy j Fz k ( p x y z x Fz p x y z z p p p i j k ) x y z (p) x y z x y z i j k x y z Newton’s second law F ma Fs W p x y z x y z x y z a p k a 2 General equation of motion for a fluid in which there are no shearing stresses. 2.3 Pressure variation in a fluid at rest a 0 p k 0 p z dp dz (Eq. 2.4) 2.3.1 Incompressible g const p2 p 1 dp z dz p1 p2 ( z2 z1 ) h z1 2 Hydrostatic Distribution p1 h p2 *see Fig. 2.2 h pressure head 10 psi p1 p2 h 23.1 ft or 518mmHg Ex: ( 62.4 lb 2 ) ( 133 KN 3 ) ft m p h p0 Pressure in a homogeneous, incompressible fluid at rest ~ reference level, X size or shape of the container. The required equality of pressures at equal elevations Throughout a system. F2 A2 F1 A1 ( Fig. 2.5) Transmission of fluid pressure 3 p1 p2 2.3.2 Compressible Fluid perfect gas: dp gp g dz RT p RT p dp p2 g Z dz p p ln p R Z T 1 2 1 2 1 Assume g , R const. (z1 z 2 ) T T0 over z1 , z2 isothermal conditions g ( z2 z1 ) p2 p1 exp RT0 2.4 Troposphere: 4 T Ta z Ta @ z 0 0.0065 K lapose rate m 0.00357 R p pa (1 ft z Ta g ) R 2.5 Measurement of Pressure See Fig. 2.7 explain the gage and absolute pressure patm h pvapor (Mercury barometer) Example 2.3 pa N ( pascal) m2 2.6 Manometry 1. Piezometer Tube: 1. p pa 2. h 1 is reasonable p pa 不大 2. U-Tube Manometer: 3. liquid, not a gas p A 2 h2 1h1 3. Inclined-tube manometer see examples *explain Fig. 2.11 Differential U-tube manometer p A pB 2 h2 3h3 1h1 Example 2.5 Ex. 2.5 5 u , p , p p A pB Q(the volume rate of the flow) k p A pB p A 1h1 2 h2 1 (h1 h2 ) pB p A pB h2 ( 2 1 ) 2.6.3 Fig. 2.12 Inclined tube manometer p A pB 2l2 sin p pB l2 A 2 sin Small difference in gas pressure If pipes A & B c o n t a ai ng a s 2.7 Mechanical and Electronic Pressure Measuring Device . Bourdon pressure gage (elastic structure) Bourdon Tube p , curved tube → straight deformation → dial . A zero reading on the gage indicates that the measured pressure . Aneroid barometer-measure atmospheric pressure (absolute pressure) . Pressure transducer-pressure V.S. time 6 Bourdon tube is connected to a linear variable differential transformer (LVDT), Fig. 2.14 coil; voltage This voltage is linear function of the pressure, and could be recorded on an oscillograph, or digitized for storage or processing on computer. Disadvantage-elastic sensing elementmeas. pressure are static or only changing slowly (quasistatic). relatively mass of Bourdon tube <diaphragm> *strain-gage pressure transducer * Fig. 2.15 (arterial blood pressure) piezo-electric crystal. (Refs. 3, 4, 5) 1Hz 2.8 Hydrostatic Force on a Plane Surface Fig. 2.16 Pressure and resultants hydrostatic force developed on the bottom of an open tank. FR pA Storage tanks, ships . For fluid at rest we know that the force must be perpendicular to the surface, since there are no shearing stress present. 7 . Pressure varies linearly with depth if incompressible dp g p h for open tank, Fig. 2.16 dz The resultant force acts through the centroid of the area dθ Ri τ R0 * Exercise 1.66 d RidA torque shearing stress dA ( Ri d )l d Ri ld 2 2 Ri2l 0 d 2Ril Assume velocity distribution in the gap is linear 2Ri3lw R0 Ri 8 Ri w R0 Ri dF hdA FR A hdA A y sindA if , are constants. FR sin A ydA first moment of the area ∫ydA y A A c FR AyC sin hc A Indep. Of The moment of the resultant force must equal the moment of the Distributed pressure force FR yR A ydF A siny 2 dA FR A C sin yR A y 2 dA yc A I x A y 2 dA second moment of the area (moment of inertia) yR Ix ; I x I xc Ayc2 yc A 9 yR I xc yc ycA yR yc xR I xyc xc ycA I xc , I xyc ect see Fig. 2.18 Note: Ixy-the product of inertia wrt the x& y area. Ixyc-the product of inertia wrt to an orthogonal coord. system passing through the centroid of the area. If the submerged area is symmetrical wrt an axes passing through the centroid and parallel to either the x or y axes, the resultant force must lie along the line x=xc, since Ixyc= 0. Center of pressure (Resultant force acts points) Example 2.6 求 a. FR ; ( xR , yR ) b. M ( moment ) 10 a. FR Eq. 2.18 FR 1.23 106 N xR Eq. 2.19, 2.20 xR 0 yR 11.6m yR b. M c 0 (shaft ; water) M FR ( yR yc ) 1.01 105 N m 2.9 Pressure Prismthe pressure varies linearly with depth. See Fig. 2.19 11 h FR PAve A ( ) A 2 FR volume of pressure prism 1 h (h)(bh) A 2 2 No matter what the shape of the pressure prism is, the resultant force is still equal in magnitude to the volume of the pressure Prism, and it passes through the centroid of the volume. dp First, draw the pressure prism out. dz p z p0 Example 2.8 F1 (h1 ps ) A 2.44 10 4 N h2 h1 ) A 0.954 103 N 2 FR F1 F2 25.4 KN F2 ( FR y0 F1 (0.3m) F2 (0.2m) y0 0.296 m 12 2.10 Hydrostatic Force on a Curved Surface . Eqs. Developed before only apply to the plane surfaces magnitude and location of FR . Integration: tedious process/ no simple, general formulas can be developed. . Fig. 2.23 F1; F2 → plane surface W xV; through C.G(center of gravity ) FH , FV The compoments of force that the tank exerts on the fluid. For equilibrium, FH F2 ; collinear. through pt FV F1 W Example 2.9 排水管受力情形 See Fig. 2.18 13 F1 hc A lb 3 ft 3 1 ft 2 3 ft 2 281lb 62.4 lb 32 2 ∀ g∀ 62.4 3 ft 1 ft 441lb at C.G (Centroid; ft 4 center of pressure, CP; center of gravity) 1 4 3 I C 3 yR yC ft 12 ft 2 ft 3 2 yc A 2 3 2 4R 4 3 Similarly xR ≈1.27 ft 1.27 ft 3 3 ∴ F1 FH 281lb; FV 441lb; F2 0 ∴ FR FH2 FV2 523lb tan FH F ⇒ tan -1 H 32.5 FV FV 2.11 Buoyancy, Flotation, and Stability 2.11.1 阿基米德原理請看圖 2.24, 來分析其受力情形 FB V →任意 形狀的物體之體積 2.11.2 Stability stable equilibriumExplain Fig. 2.25; 26; 27; 28 14